Изобретение относится к заготовке леса, в частности для выполнения грузовых переместительных операций при воздушном способе трелевки без использования ручного труда вальщика и чокеровщика.
Известна установка для заготовки древесных ресурсов для воздушных систем трелевки, содержащая конусный корпус, бортовую лебедку, канаты управления, аэростата, прижимные лепестки (Патент РФ 2503172, A01G 23/00, A01G 23/06, опубл. 10.01.2014).
Недостатком системы является наличие и использование для отделения комлевой части дерева взрывающихся устройств, использование которых приводит к повреждению ствола, снижению общей безопасности лесозаготовительных работ, уменьшению производительности за счет периодической перезарядки механизма снабжения и управления взрывающимися устройствами, а также к техническим сложностям при работе в зимний период с глубоким снегом.
Наиболее близким по технической сущности и достигаемому результату является механизм для обрезки ветвей с вертикально стоящего дерева, спила и переноса ствола, используемый для средств воздушной трелевки, включающий корпус с разделяющимися верхним и нижним силовыми элементами, грузовыми канатами, несколько лебедок для опускания и подъема груза, электрические пилы (Патент США №6263932, A01G 23/095, опубл. 24.07.2001).
Однако известный механизм имеет высокую энергоемкость за счет использования пяти пильных механизмов и гидроцилиндров для их управления, что увеличивает его размеры, массу и соответственно стоимость, и себестоимость работ. Также предложенное расположение дисковых пил не обеспечивает полного среза ветвей и сучьев со стоящего дерева.
Технической задачей, на решение которой направлено изобретение, является обеспечение работ, связанных с обрезкой ветвей и сучьев с вертикально стоящих деревьев, удержанием ствола при дальнейшем его спиле и изъятии из полога леса, и перемещении с помощью аэростата на разгрузочный пункт.
Поставленная задача достигается тем, что разделяющийся на два рабочих узла грузозахватный механизм, удерживаемый аэростатом, согласно изобретению содержит верхний узел для удержания верхушки дерева в процессе его спила и переноса в пункт разгрузки, выполненный в виде силового кольца с выдвижными зубчатыми лапами, и нижний узел, выполненный в виде усеченного конуса, внутри которого расположены система удержания комлевой части ствола и инерционный режущий механизм, состоящий из комплекса разноуровневых ножей, закрепленных на краях внутренней части прижимных лепестков, которые, в свою очередь, за счет закрепленных между ними и внутренней частью рабочего конуса пружин кручения обеспечивают плотное прилегание ножей к стволу дерева.
Кроме того, прижимные лепестки с ножами расположены на двух уровнях по вертикали, что обеспечивает срезание максимально возможного объема ветвей и сучьев, расположенных по всей окружности ствола дерева.
Кроме того, устройство имеет систему удержания вершиной и комлевой частей ствола дерева, представленной червячными электромеханизмами, предназначенными для выдвижения зубчатых лап, для обеспечения наибольшего сопротивления выскальзыванию ствола дерева в процессе воздушной транспортировки.
Кроме того, процесс опускания, наведения и подъема осуществляется с помощью четырех грузовых электрических кабелей, предназначенных для удержания верхней и нижней частей РГЗМ и передачи электрической энергии от генератора механизма наведения на червячные механизмы системы удержания ствола дерева.
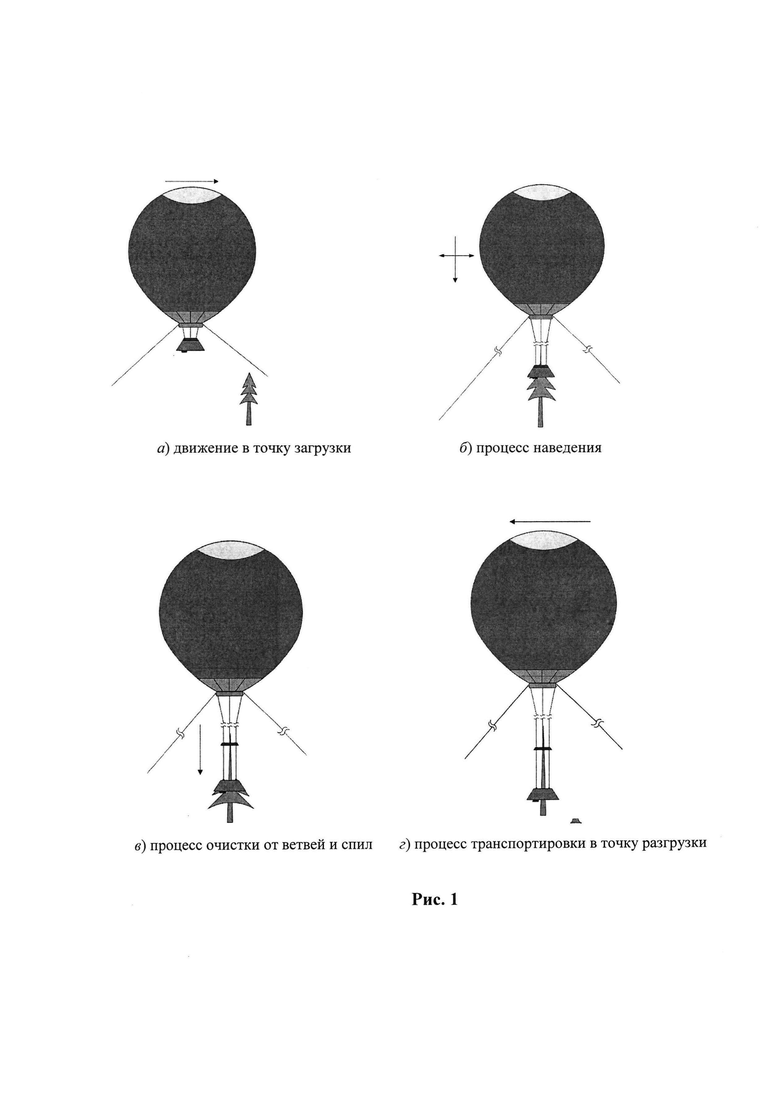
При перемещении в точку загрузки, во избежание колебаний грузовой подвески, верхний и нижний узлы находятся в сомкнутом состоянии под оболочкой аэростата. Когда аэростат достигает точки нахождения дерева, происходит его остановка за счет затормаживания работы барабанов наземных лебедок и последующее наведение и опускание РГЗМ на верхушку дерева с помощью бортового лебедочного комплекса, который находится под оболочкой аэростата. В момент достижения РГЗМ вершины дерева происходит его разделение, после чего верхняя часть остается на месте, выполняя функции удержания вершины дерева, а нижняя часть, опускаясь вниз, за счет силы инерции, массы и специальных внутренних механизмов производит срез ветвей, захват комля, его срез и последующее удержание в процессе подъема и транспортировки.
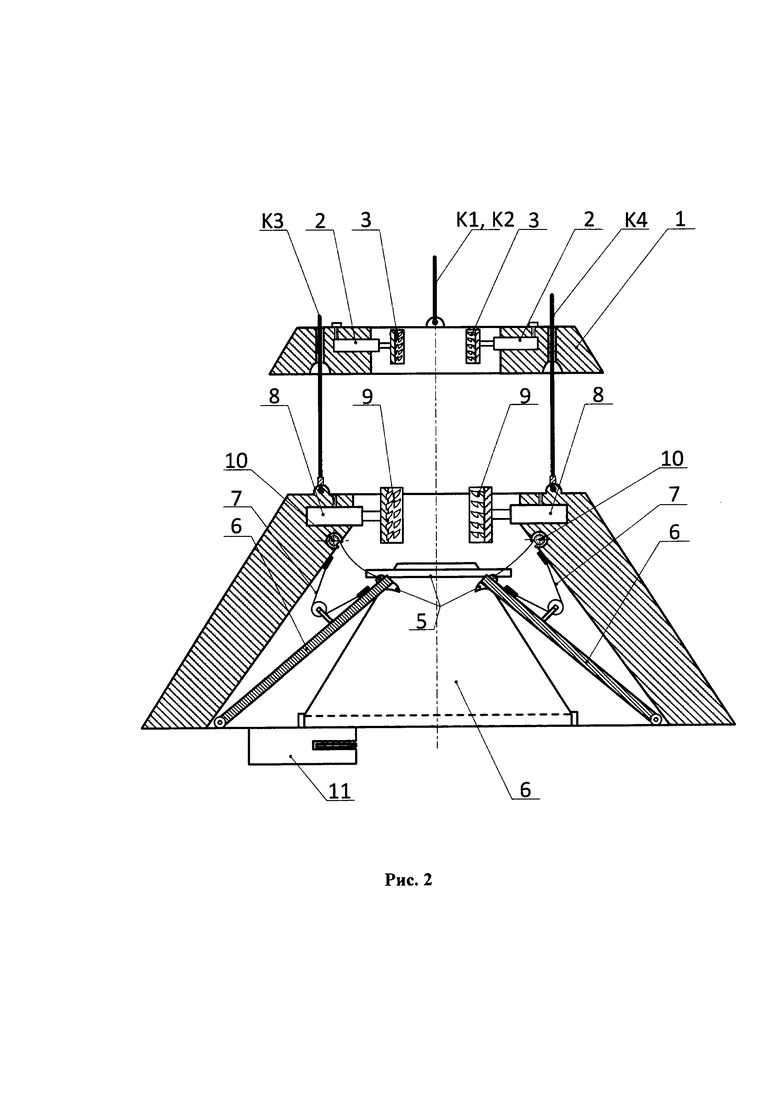
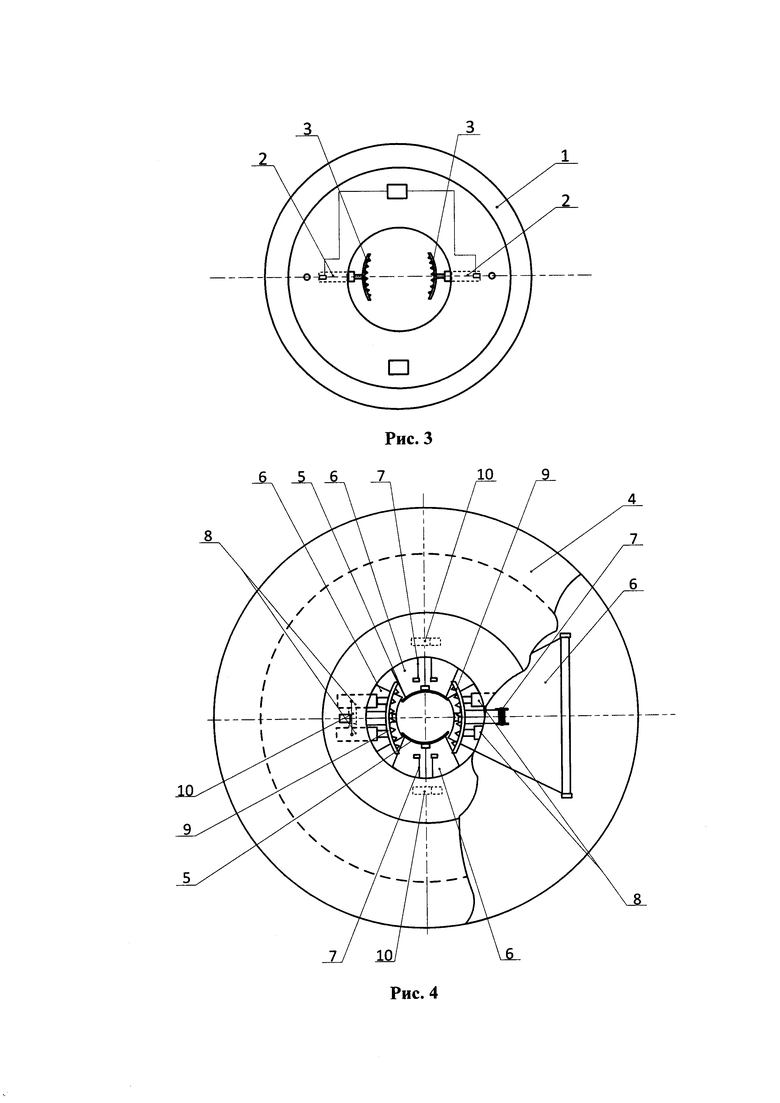
Сущность изобретения поясняется чертежами, где на рис. 1 - принцип работы РГЗМ нисходящего типа движения; рис. 2 - общий вид механизма с боку; на рис. 3 - вид сверху верхнего узла РГЗМ; на рис. 4 - вид сверху нижнего силового узла РГЗМ.
Устройство и работа разделяющегося грузозахватного механизма нисходящего типа движения для воздушных систем трелевки состоит и заключается в следующем.
Верхний узел РГЗМ представлен силовым кольцом 1, которое в совокупности с двумя червячными электромеханизмами 2, расположенными через 180° по верхнему кругу силового кольца и предназначенными для выдвижения специальных зубчатых лап 3, служит для удержания вершинной части дерева в процессе его спила и переноса в пункт разгрузки.
Нижний узел РГЗМ представляет собой усеченный конус 4, внутри которого расположен инерционный режущий механизм и система удержания комлевой части ствола дерева.
Инерционный режущий механизм состоит из комплекса разноуровневых ножей 5, закрепленных на краях внутренней части прижимных лепестков 6, которые, в свою очередь, за счет закрепленных между ними и внутренней частью рабочего конуса специализированных пружин кручения 7 обеспечивают плотное прилегание ножей к стволу дерева.
Система удержания комлевой части ствола представлена четырьмя червячными электромеханизмами 8, предназначенными для выдвижения специальных зубчатых лап 9 под определенным углом, что обеспечивает наибольшее сопротивление выскальзыванию ствола дерева в процессе воздушной транспортировки.
Прижимные лепестки с ножами расположены на двух уровнях по вертикали, что обеспечивает срезание максимально возможного объема ветвей и сучьев, расположенных по всей окружности ствола дерева.
Процесс опускания, наведения и подъема РГЗМ осуществляется с помощью четырех грузовых электрических кабелей (К1, К2, К3, К4), предназначенных для удержания верхней и нижней частей РГЗМ и передачи электрической энергии от генератора механизма наведения на червячные механизмы 2 и 8 системы удержания ствола дерева.
Прежде чем начать срезать ветви, лепестки прижимного механизма 6 полностью открыты, т.е. прижаты к внутренней стороне конуса 4. Это позволяет верхушке дерева проходить вовнутрь конуса, не зацепляясь за ножи 5. Прижим лепестков к внутренней стенке конуса 4 осуществляется с помощью четырех мини-лебедок 10, которые расположены во внутренних стенках конуса напротив каждого прижимного лепестка.
После того, как вершина дерева беспрепятственно проникает в конус РГЗМ и верхнего силового кольца в среднем на 4-5 м, барабаны управления канатами К1 и К2 стопорятся, тем самым прерывая опускание верхнего узла, представленного силовым кольцом 1, а нижний узел, представленный усеченным конусом 4 с режущими элементами, продолжает опускание за счет выпуска канатов К3 и К4. Режущие элементы за счет упругости пружин 7 и уже ослабленных канатов от мини-лебедок 10 плотно прилегают к стволу дерева, тем самым обеспечивая срез ветвей при снижении нижнего узла РГЗМ.
По мере снижения нижнего узла 4 РГЗМ от верхушки дерева к комлевой части и одновременного срезания ветвей происходит увеличение диаметра ствола, за счет чего повышается давление на лепестки прижимного механизма 6, которое приводит к сжатию пружин 7 и обеспечивает постепенное раскрытие лепестков 6, относительно увеличивающегося диаметра дерева. Соответственно это постепенное раскрытие позволяет РГЗМ с режущим механизмом за счет собственной массы опускаться вниз по стволу дерева, одновременно срезая ветви и сучья. При достижении комлевой части поступают одновременные команды на остановку работы барабанов для канатов КЗ и К4, тем самым останавливая движение нижнего узла РГЗМ, и на червячные механизмы 2 и 8, которые, выдвигая специальные зубчатые лапы 3 и 9, удерживают очищенный ствол дерева. После фиксации ствола дерева системой удержания происходит его спил с помощью электрической пилы 11, которая расположена в нижней части нижнего узла РГЗМ.
Спиленный и зафиксированный ствол дерева поднимается с помощью канатов К1, К2, К3, К4, управляемых бортовой четырехбарабанной лебедкой, расположенной под аэростатом, на высоту, обеспечивающую некасание комлевой части ствола верхушек растущих деревьев.
Далее, поднятый ствол дерева в вертикальном положении с помощью аэростата и тягово-возвратных канатов, управляемых наземной лебедкой, транспортируется на разгрузочный пункт.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разделяющийся грузозахватный механизм восходящего типа движения | 2015 |
|
RU2628511C2 |
| СИСТЕМА НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ГРУЗОЗАХВАТНОГО МЕХАНИЗМА ДЛЯ АЭРОСТАТНО-КАНАТНОЙ СИСТЕМЫ ТРЕЛЕВКИ | 2013 |
|
RU2531319C1 |
| МЕХАНИЗМ НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ГРЕЙФЕРНОГО ЗАХВАТА ДЛЯ ВОЗДУШНЫХ СИСТЕМ ТРЕЛЕВКИ | 2013 |
|
RU2531322C1 |
| АЭРОСТАТНО-КАНАТНАЯ СИСТЕМА ДЛЯ ВОЗДУШНОЙ ЗАГОТОВКИ И ТРАНСПОРТИРОВКИ ДРЕВЕСИНЫ | 2012 |
|
RU2499706C1 |
| СПОСОБ ЗАГОТОВКИ ДРЕВЕСНЫХ РЕСУРСОВ | 2012 |
|
RU2504145C2 |
| УСТАНОВКА ДЛЯ ЗАГОТОВКИ ДРЕВЕСНЫХ РЕСУРСОВ | 2012 |
|
RU2503172C1 |
| СПОСОБ ЗАГОТОВКИ ДРЕВЕСИНЫ НА КРУТЫХ СКЛОНАХ С ИСПОЛЬЗОВАНИЕМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ И АЭРОСТАТНО-КАНАТНОЙ СИСТЕМЫ | 2013 |
|
RU2538825C2 |
| Устройство для удаления сучьев со спиленных деревьев | 1958 |
|
SU119397A1 |
| СУЧКОРЕЗНО-РАСКРЯЖЕВОЧНАЯ ТРЕЛЕВОЧНАЯ МАШИНА | 2000 |
|
RU2175186C1 |
| Способ посадки, выращивания культур и выборочных рубок с заготовкой сортиментов машинами на возобновляемых искусственным путем лесных площадях | 2021 |
|
RU2769472C1 |
Изобретение относится к заготовке леса. Разделяющийся грузозахватный механизм нисходящего типа движения конусного вида удерживается аэростатом в процессе опускания с помощью четырех бортовых лебедок и для обработки вертикально стоящего дерева разделяется на два рабочих узла. Верхний узел предназначен для удержания верхушки дерева в процессе его спила и переноса в пункт разгрузки и выполнен в виде силового кольца с выдвижными зубчатыми лапами. Нижний узел выполнен в виде усеченного конуса, внутри которого расположены система удержания комлевой части ствола и инерционный режущий механизм. Причем срезание ветвей и сучьев происходит за счет инерционного режущего механизма из комплекса разноуровневых ножей, закрепленных на краях внутренней части прижимных лепестков. Лепестки за счет закрепленных между ними и внутренней частью рабочего конуса пружин кручения обеспечивают плотное прилегание ножей к стволу дерева. Прижимные лепестки с ножами расположены на двух уровнях по вертикали. РГЗМ имеет систему удержания вершинной и комлевой частей ствола дерева, представленную червячными электромеханизмами, предназначенными для выдвижения зубчатых лап. Процесс опускания, наведения и подъема РГЗМ осуществляется с помощью четырех грузовых электрических кабелей, предназначенных для удержания верхней и нижней частей РГЗМ и передачи электрической энергии от генератора механизма наведения на червячные механизмы системы удержания ствола дерева. Изобретение позволяет усовершенствовать воздушный способ трелевки леса, обеспечить безопасность процесса. 3 з.п. ф-лы, 4 ил.
1. Разделяющийся на два рабочих узла грузозахватный механизм, удерживаемый аэростатом, отличающийся тем, что он содержит верхний узел для удержания верхушки дерева в процессе его спила и переноса в пункт разгрузки, выполненный в виде силового кольца с выдвижными зубчатыми лапами, и нижний узел, выполненный в виде усеченного конуса, внутри которого расположены система удержания комлевой части ствола и инерционный режущий механизм, состоящий из комплекса разноуровневых ножей, закрепленных на краях внутренней части прижимных лепестков, которые, в свою очередь, за счет закрепленных между ними и внутренней частью рабочего конуса пружин кручения обеспечивают плотное прилегание ножей к стволу дерева.
2. Разделяющийся на два рабочих узла грузозахватный механизм по п. 1, отличающийся тем, что прижимные лепестки с ножами расположены на двух уровнях по вертикали, что обеспечивает срезание максимально возможного объема ветвей и сучьев, расположенных по всей окружности ствола дерева.
3. Разделяющийся на два рабочих узла грузозахватный механизм по п. 1, отличающийся тем, что имеет систему удержания вершиной и комлевой части ствола дерева, представленной червячными электромеханизмами, предназначенными для выдвижения зубчатых лап, для обеспечения наибольшего сопротивления выскальзыванию ствола дерева в процессе воздушной транспортировки.
4. Разделяющийся на два рабочих узла грузозахватный механизм по п. 1, отличающийся тем, что процесс опускания, наведения и подъема осуществляется с помощью четырех грузовых электрических кабелей, предназначенных для удержания верхней и нижней частей РГЗМ и передачи электрической энергии от генератора механизма наведения на червячные механизмы системы удержания ствола дерева.
| US 6263932 B1, 24.07.2001 | |||
| US 6672347 B2, 06.01.2004 | |||
| УСТАНОВКА ДЛЯ ЗАГОТОВКИ ДРЕВЕСНЫХ РЕСУРСОВ | 2012 |
|
RU2503172C1 |
| Устройство для воздушной трелевки леса | 1980 |
|
SU954057A1 |

