Изобретение относится к заготовке леса, в частности для выполнения грузовых операций при воздушном способе трелевки.
Известна система наведения и стабилизации грузового механизма, содержащая корпус, крепление грузовых строп аэростата, лебедку с канатом и чокерным приспособлением для крепления груза (Патент США №3807577, B66C 21/00, опубл. 30.04.1974).
Недостатком системы является наличие ручного труда при выполнении трелевочных и грузоразгрузочных операций.
Наиболее близкой по технической сущности и достигаемому результату является система наведения и стабилизации грузозахватного механизма для аэростатно-канатной системы трелевки, включающая корпус с прикрепленными к нему грузовыми стропами аэростата, лебедку с приводом, управляющую грузовым канатом с приспособлением для крепления и подъема груза, и радиодистанционное управление лебедкой (Патент США №5080302, A01G 23/02, опубл. 1992 г.).
Однако известная система имеет пониженную оперативность лесозаготовительного цикла, тем самым низкопроизводительна, не исключает травматизм из-за использования ручного труда и не имеет точности наведения грузозахватного механизма и стабилизации грузовой подвески в процессе выполнения трелевки.
Технической задачей, на решение которой направлено заявленное изобретение, является обеспечение оперативности работ, улучшение точности наведения грузозахватного механизма, а также стабилизация грузовой подвески с захватным приспособлением в процессе выполнения трелевочных и грузоразгрузочных операций.
Поставленная задача достигается тем, что в системе наведения и стабилизации грузозахватного механизма для аэростатно-канатной системы трелевки, включающей корпус с прикрепленными к нему грузовыми стропами аэростата, лебедку с приводом, управляющую грузовым канатом с приспособлением для крепления и подъема груза, и радиодистанционное управление лебедкой, согласно изобретению в корпусе расположены две лебедки с приводом от электродвигателей, кроме того, лебедки с электродвигателями установлены на поворотной платформе с приводом от дополнительного электродвигателя на подшипниках скольжения, платформа по краям через 90° имеет четыре амортизатора, при этом приспособление для крепления подъема и опускания груза выполнено в виде грейфера, а грузовые канаты помимо силовой и грузовой функции обеспечивают подачу тока на электромеханизмы червячного типа на грейфере, работающие на закрытие и открытие клешней грейфера. Кроме того, на корпусе грейфера расположена видеокамера с радиодистанционной передачей сигнала, при этом на корпусе расположены солнечные энергетические преобразователи для снабжения системы электричеством. Кроме того, в конструкции предусмотрена прижимная контактная сеть, снабженная амортизатором с червячным механизмом подачи. Кроме того, поворотная платформа выполнена из гибкого морозоустойчивого пластика с вмонтированной в нее внутренней зубчатой передачей. Кроме того, каждый из грузовых канатов имеет свой электрический потенциал.
Применение в корпусе двух лебедок с приводом от электродвигателей, а также лебедок с электродвигателями, установленными на поворотной платформе с приводом от дополнительного электродвигателя на подшипниках скольжения, позволяет улучшить оперативность и плавность работ по наведению грейфера в процессе выполнения трелевочных и грузоразгрузочных операций.
Оборудование платформы по краям через 90° четырьмя амортизаторами позволяет устранить динамические рывки в процессе трелевочных операций.
Выполнение приспособление для крепления подъема и опускания груза в виде грейфера исключает ручной труд и тем самым устраняет травматизм в процессе работы, а также повышает оперативность и производительность работ.
Использование грузовых канатов помимо силовой и грузовой функции для подачи тока на электромеханизмы червячного типа на грейфере, работающих на закрытие и открытие клешней грейфера, обеспечивает надежность работы и защиту от возможного замыкания за счет разности потенциалов на каждом грузовом канате.
Применение на корпусе грейфера видеокамеры с радиодистанционной передачей сигнала позволяет повысить оперативность работ и точность наведения грейфера на груз.
Использование на корпусе солнечных энергетических преобразователей для снабжения системы электричеством, обеспечивает бесперебойную работу электродвигателей, независимость от традиционных источников топлива, снижение веса конструкции.
Использование в конструкции прижимной контактной сети, снабженной амортизатором с червячным механизмом подачи, позволяет надежно передавать ток на вращающиеся детали механизма.
Выполнение поворотной платформы из гибкого морозоустойчивого пластика с вмонтированной в нее внутренней зубчатой передачей обеспечивает снижение общего веса конструкции и надежную передачу крутящего момента.
Использование на каждом из грузовых канатов своего электрического потенциала (плюс или минус) позволяет исключить замыкание сети.
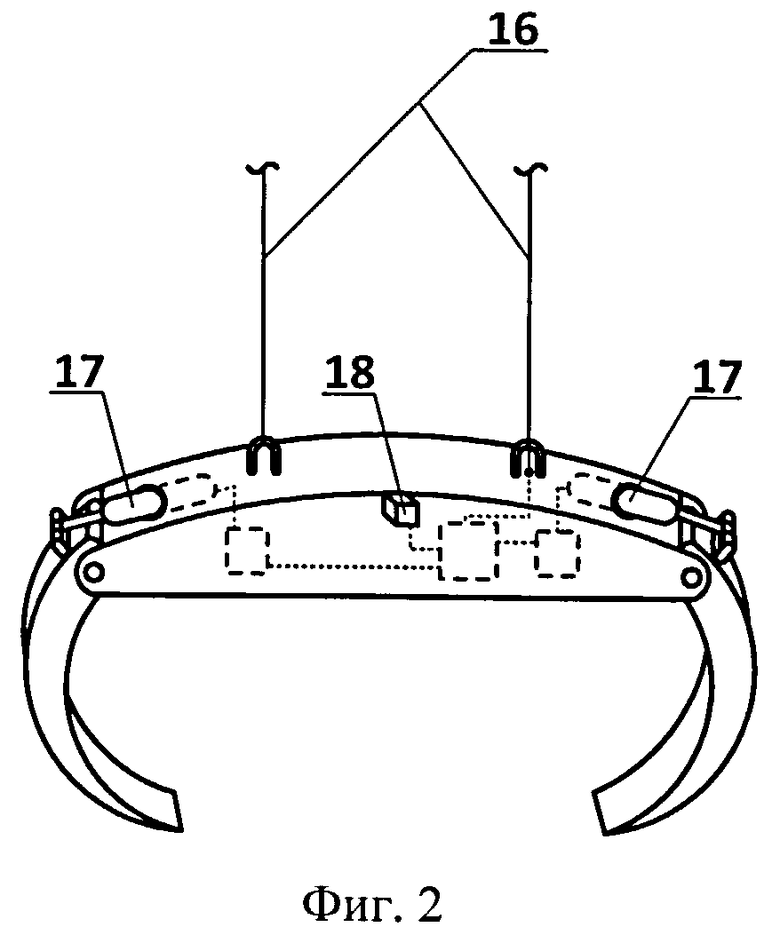
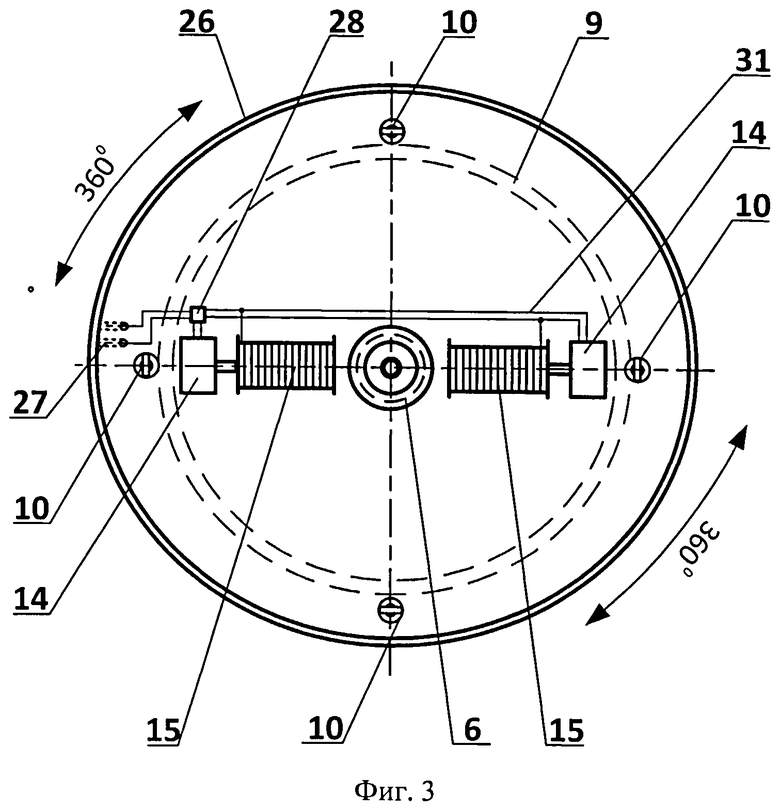
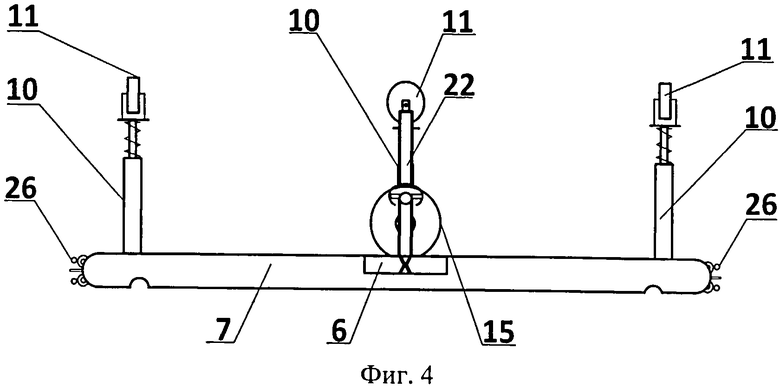
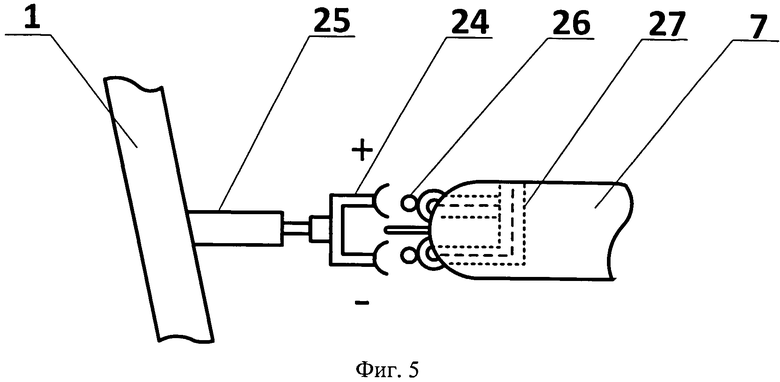
Сущность изобретения поясняется чертежами, где на фиг.1 приведен общий вид системы; на фиг.2 - общий вид грейфера; на фиг.3 - вид сверху поворотной платформы; на фиг.4 - вид сбоку поворотной платформы; на фиг.5 - общий вид контактной сети.
Устройство и работа системы наведения и стабилизации грузозахватного механизма для аэростатно-канатной системы трелевки состоит в следующем.
Грузозахватный механизм имеет общий контур корпуса 1, который представлен в виде усеченного конуса, одна сторона которого, с помощью металлических скоб 2, расположенных по краю верхнего диаметра, крепится грузовыми стропами 3 к нижней точке аэростата. Внутри корпуса 1, в центре расположен электродвигатель 4, который передает крутящий момент с помощью карданного вала 5 на ведущую шестерню 6, находящуюся в центре круглой поворотной платформы 7 и соединенной с ней путем внутренней зубчатой передачи. Электродвигатель 4 обеспечивает вращение поворотной платформы 7 на 360°. Плавное и безнагрузочное вращение обеспечивается также за счет специальных шаров 8, играющих роль подшипников скольжения, находящихся в пазах 9 нижних частей корпуса и поворотной платформы 7. По краям платформы 7 через 90° друг от друга расположены четыре амортизатора 10, необходимых для предотвращения перекосов и динамических рывков поворотной платформы 7 в процессе вращения, а также в процессе подъема и опускания груза. Верхняя часть амортизаторов снабжена поворотным колесиком 11, которое обеспечивает беспрепятственное и плавное движение амортизаторов в процессе вращения поворотной платформы 7. Все четыре колесика посажены в паз 12, находящийся по окружности в средней внутренней части корпуса. Наличие паза 12 обеспечивает устойчивость и не раскачивание амортизаторов 10 в процессе вращения поворотной платформы 7. Подъем и опускание грейфера 13 обеспечивается двумя электрическими лебедками, закрепленными на поворотной платформе 7, снабженными электродвигателями 14 и барабанами 15 с грузовыми электрическими кабелями 16, которые помимо силовой и грузовой функции обеспечивают подачу тока на два электромеханизма червячного типа 17, которые работают на закрытие и открытие клешней грейфера 13. На корпусе грейфера 13 расположена видеокамера 18 с радиодистанционной передачей сигнала, необходимая для более точного наведения захватного механизма на груз. Электричеством камера обеспечивается также посредством кабелей 16. Общее снабжение системы электричеством осуществляется солнечными энергетическими преобразователями (СЭП) 19, расположенными по верхнему диаметру корпуса 1. Панели СЭПов 19 имеют закругленную форму для уменьшения лобового сопротивления от ветрового потока в процессе перемещения аэростата, а также электромеханизм 20 для изменения их угла наклона в зависимости от направления солнечных лучей. Ток от СЭПов 19 поступает в аккумулятор 21, а после чего через блок преобразования тока 22 распределяется по механизмам потребления: блоку управления 23, электродвигателям 4 и 14, электромеханизмам 17 и 20, видеокамере 18. Передача тока электродвигателям 14, находящимся на вращающейся платформе 7, исключает возможность использования обычной проводной подачи тока по кабелю ввиду перекручивания кабеля во время вращения платформы 7, поэтому в конструкции предусмотрена прижимная контактная сеть 24, снабженная амортизатором с червячным механизмом подачи 25. Для подачи тока на электродвигателя 14 и электромеханизмы 17 грейферного захвата 13 контактную сеть с помощью червячного механизма подачи 25 надвигают на контактные кольца 26, которые расположены на торце круглой поворотной платформы, а внутри ее имеются отводные не пересекающиеся каналы 27 до электродвигателей 14 и отдельно, через соединительную коробку 28 по внутренним каналам соединяются с электрогрузовыми кабелями 16 барабанов 15. Для обеспечения надежности работы и защиты от возможного замыкания на один барабан приходит минусовой потенциал, а на другой - плюсовой, которые, приходя по отдельным кабелям на грейфер, питают током камеру и червячные механизмы. Чтобы исключить перетирание электрогрузовых кабелей об корпус поворотной платформы, барабаны снабжены роликовыми направляющими 29. Для уменьшения веса конструкции корпус 1 системы выполнен из облегченных металлопластиковых материалов, а поворотная платформа 7 выполнена из гибкого морозоустойчивого пластика с вмонтированной в нее внутренней зубчатой передачей - это не только облегчает вес конструкции, но и также обеспечивает защиту от возможного замыкания контактной сети 24 и контактных колец 26. Процесс наведения, а также процесс опускания, подъема и захвата ведется наземным оператором за счет использования радио- и видеодистанционных сигналов, поступающих с наземного пульта управления на антенну 30, после чего они обрабатываются и распределяются блоком управления 23 по системе с помощью кабелей 16 и 31.
В отличие от аналогов предлагаемая система наведения и стабилизации грузозахватного механизма для аэростатно-канатной системы трелевки позволяет обеспечить оперативность работ, улучшить точность наведения грузозахватного механизма, а также стабилизировать работу грузовой подвески с захватным приспособлением в процессе выполнения трелевочных и грузоразгрузочных операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ГРЕЙФЕРНОГО ЗАХВАТА ДЛЯ ВОЗДУШНЫХ СИСТЕМ ТРЕЛЕВКИ | 2013 |
|
RU2531322C1 |
| АЭРОСТАТНО-КАНАТНАЯ СИСТЕМА ДЛЯ ВОЗДУШНОЙ ЗАГОТОВКИ И ТРАНСПОРТИРОВКИ ДРЕВЕСИНЫ | 2012 |
|
RU2499706C1 |
| Разделяющийся грузозахватный механизм нисходящего типа движения | 2015 |
|
RU2651813C2 |
| СПОСОБ ЗАГОТОВКИ ДРЕВЕСИНЫ НА КРУТЫХ СКЛОНАХ С ИСПОЛЬЗОВАНИЕМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ И АЭРОСТАТНО-КАНАТНОЙ СИСТЕМЫ | 2013 |
|
RU2538825C2 |
| УСТРОЙСТВО ДЛЯ АЭРОСТАТНО-КАНАТНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1991 |
|
RU2027620C1 |
| Разделяющийся грузозахватный механизм восходящего типа движения | 2015 |
|
RU2628511C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ ДРЕВЕСИНЫ С ИСПОЛЬЗОВАНИЕМ НАДУВНЫХ ПЛАВАЮЩИХ ОПОР | 2013 |
|
RU2531649C1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| УСТАНОВКА ДЛЯ ВОЗДУШНОЙ ТРЕЛЕВКИ ЛЕСА | 1988 |
|
RU2049716C1 |
| ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1969 |
|
SU238941A1 |
Система включает корпус с прикрепленными к нему грузовыми стропами аэростата, лебедку с радиодистанционным управлением. Лебедка имеет привод и управляет грузовым канатом с приспособлением для крепления и подъема груза. В корпусе расположены две лебедки с приводом от электродвигателей. Лебедки с электродвигателями установлены на поворотной платформе на подшипниках скольжения с приводом от дополнительного электродвигателя. Платформа по краям через 90° имеет четыре амортизатора. Приспособление для крепления, подъема и опускания груза выполнено в виде грейфера. Грузовые канаты помимо силовой и грузовой функции обеспечивают подачу тока на электромеханизмы червячного типа на грейфере и работают на закрытие и открытие клешней грейфера. На корпусе грейфера расположена видеокамера с радиодистанционной передачей сигнала. На корпусе расположены солнечные энергетические преобразователи для снабжения системы электричеством. Такое конструктивное выполнение позволит обеспечить оперативность работ, улучшить точность наведения грузозахватного механизма, а также стабилизировать грузовую подвеску с захватным приспособлением в процессе выполнения трелевочных и грузоразгрузочных операций. 3 з.п. ф-лы, 5 ил.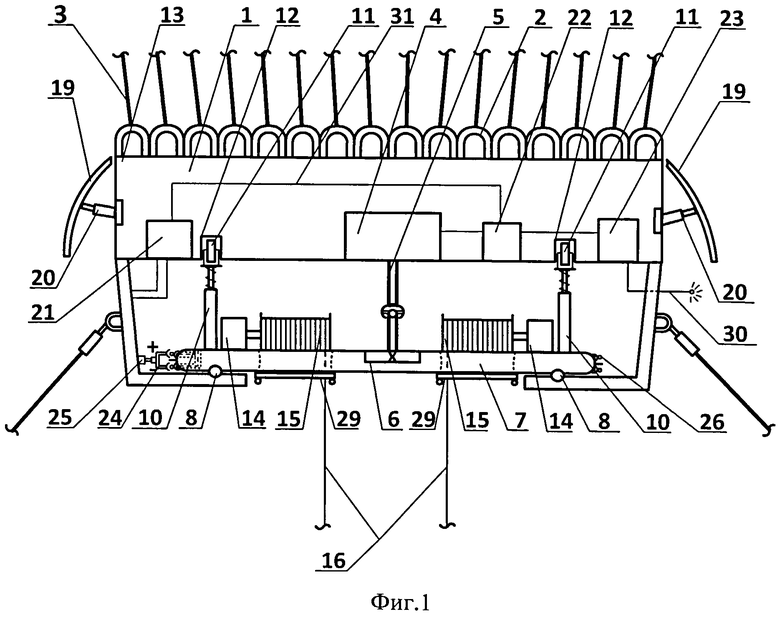
1. Система наведения и стабилизации грузозахватного механизма для аэростатно-канатной системы трелевки, включающая корпус с прикрепленными к нему грузовыми стропами аэростата, лебедку с приводом, управляющую грузовым канатом с приспособлением для крепления и подъема груза, и радиодистанционным управлением, отличающаяся тем, что в корпусе расположены две лебедки с приводом от электродвигателей, кроме того, лебедки с электродвигателями установлены на поворотной платформе с приводом от дополнительного электродвигателя на подшипниках скольжения, платформа по краям через 90° имеет четыре амортизатора, при этом приспособление для крепления подъема и опускания груза выполнено в виде грейфера, а грузовые канаты помимо силовой и грузовой функции обеспечивают подачу тока на электромеханизмы червячного типа на грейфере, работающие на закрытие и открытие клешней грейфера, при этом на корпусе грейфера расположена видеокамера с радиодистанционной передачей сигнала, при этом на корпусе расположены солнечные энергетические преобразователи для снабжения системы электричеством.
2. Система наведения и стабилизации грузозахватного механизма по п.1, отличающаяся тем, что в конструкции предусмотрена прижимная контактная сеть, снабженная амортизатором с червячным механизмом подачи.
3. Система наведения и стабилизации грузозахватного механизма по п.1, отличающаяся тем, что поворотная платформа выполнена из гибкого морозоустойчивого пластика с вмонтированной в нее внутренней зубчатой передачей.
4. Система наведения и стабилизации грузозахватного механизма по п.1, отличающаяся тем, что каждый из грузовых канатов имеет свой электрический потенциал.
| US 5080302 A, 14.10.1992 | |||
| US 3369673 A, 20.02.1968 | |||
| ТРЕЛЕВОЧНАЯ УСТАНОВКА | 0 |
|
SU238941A1 |
| УСТРОЙСТВО ДЛЯ АЭРОСТАТНО-КАНАТНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1991 |
|
RU2027620C1 |
| US 2916322 A, 08.12.1959 | |||

