Изобретение относится к лесозаготовительной промышленности, в частности, к процессу трелевки древесины.
Известна аэростатно-канатная система для воздушной заготовки и транспортировки древесины, содержащая грузовую каретку, несущий канат и аэростатные носители, которые закреплены по концам несущего каната. (Абдрахманов P.P. авторское свидетельство СССР №1004172, кл. В61В 7/00, 1981 г).
Недостатками данного устройства являются:
- каретка способна перемещаться только по одной линии, что не позволяет выполнить захват груза, в частности дерева, находящегося в стороне от несущего каната;
- система не предусматривает вертикального захвата, спила и последующей трелевки древесины в подвесном режиме;
- ввиду того, что трелевочная каретка не имеет дополнительной канатной связи с аэростатом - это приведет к большим провисам каната, что даст дополнительные нагрузки и потери производительности;
- регулировка скорости перемещения каретки, за счет разностороннего изменения высоты аэростатов, не будет иметь стабильных и плавных режимов при плохих погодных условиях, в частности при усилении ветра, т.к. в конструкции отсутствуют дополнительные стабилизирующие канаты.
Наиболее близкой по достигаемому результату является аэростатно-канатная система для воздушной заготовки и транспортировки древесины, содержащая аэростатный носитель, несущий канат, грузовую каретку, установленную с возможностью перемещения по несущему канату (патент США №3103330, кл. 24-93, 1963 год).
Однако непосредственное расположение аэростата в связке с кареткой, хоть и значительно уменьшает провис каната, но сильно ограничивает скоростные возможности каретки, за счет большого воздушного сопротивления аэростата, что ведет к резкой потери производительности. Аналогично предыдущей конструкции эта система также является однолинейной, что ограничивает захват груза по обе стороны от несущего каната. В виду конструктивных особенностей, система также не предусматривает вертикального захвата, спила и переноса дерева.
Технической задачей заявленного изобретения является максимальный экологический эффект, повышение оперативности цикла валки и трелевки древесины воздушным способом в режиме выборочных рубок, увеличение площади охвата обрабатываемого участка и автоматизация процесса заготовки древесины на выборочных рубках, причем без использования ручного труда вальщика и чокеровщика.
Указанная задача достигается тем, что аэростатно-канатная система для воздушной заготовки и транспортировки древесины содержащая аэростатный носитель, несущий канат, грузовую каретку, установленную с возможностью перемещения по несущему канату согласно изобретению, содержит систему канатов, с возможностью удержания, с одной стороны, выдвижной высотной мачтой, а с другой стороны неподвижным аэростатным носителем, который в свою очередь также удерживает передвигающуюся по несущему канату каретку, в состав которой входит система захвата и спила растущего дерева. Кроме того, аэростатно-канатная система имеет три управляющих наземных лебедочных механизма, которые установлены, с возможностью регулирования перемещения трелевочной каретки, как в вертикальной, так и в горизонтальной плоскостях, за счет изменения длин и углов канатов. Кроме того, аэростатно-канатная система оборудована радио дистанционным управлением с элементами локальной пеленгации и видео наведения.
Наличие системы канатов, с возможностью удержания, с одной стороны, выдвижной высотной мачтой, а с другой стороны неподвижным аэростатным носителем, который в свою очередь также удерживает передвигающуюся по несущему канату каретку, в состав которой входит система захвата и спила растущего дерева, обеспечивает максимальный экологический эффект, ввиду отсутствия каких либо механических воздействий на растущие деревья, связанных с падением спиленного древостоя.
Применение трех управляющих наземных лебедочных механизма, которые установлены, с возможностью регулирования перемещения трелевочной каретки, как в вертикальной, так и в горизонтальной плоскостях, за счет изменения длин и углов канатов и оборудование радио дистанционным управлением с элементами локальной пеленгации и видео наведения повышает оперативность цикла валки и трелевки древесины воздушным способом в режиме выборочных рубок за счет конструктивных особенностей канатной системы, которая в совокупности с аэростатным носителем позволяет удерживать каретку и груз на необходимой высоте и при этом не уменьшать ее скорость перемещения, а также увеличивать площадь охвата обрабатываемого участка, за счет использования дополнительных канатных линий, и непосредственно трехлинейной системой управления;
Сущность изобретения поясняется чертежом, где представлена схема работы с основными элементами конструкции системы.
Аэростатно-канатная система для воздушной заготовки и транспортировки древесины состоит из аэростатного носителя аэродинамической формы 1, который играет роль верхней высотной мачты с возможностью перемещения в вертикальных и горизонтальных плоскостях. Перемещение происходит за счет изменения длины и углов удерживающих канатов 2, соединенных с грузовой подвеской 3 аэростата 1 через систему блоков 4. Во избежание касания канатов 2 за растущие деревья, у каждой из лебедок имеются дополнительные опорные мачты 5, в роли которых, могут выступать растущие древостой с предварительно обрезанной кроной.
Для сдавания и выбирания канатов 2, используют лебедки 6 и 7 с радио дистанционной системой управления. Лебедки расположены на полозьях и имеют возможность самоподтаскивания. Лебедка 7 имеет дополнительный барабан, который служит для сдавания и выбирания электрического грузонесущего кабель 8, соединенного через блок 9, находящегося в верхней части грузовой подвески 3, с трелевочной кареткой 10, расположенной на несущем канате 11.
Несущий канат 11 через блок 12, находящийся в верхней точке нижней высотной мачты 13, через дополнительный выводной блок 14, соединен с главным барабаном лебедочного механизма, который расположен внутри конструкции мачты 13. Сама мачта 13 является выдвижной и состоящей из нескольких форменных секторов, каждый из которых имеет свой комплекс удерживающих растяжек 15. Гибкость мачты и ее выдвижение обеспечивается несколькими канатами расположенных внутри конструкции и соединенными одним концом с верхними точками ферменных секторов, а другим с системой монтажных барабанов 16. Общая конструкции мачты и лебедочного механизма смонтирована на раме автомобиля 17.
Трелевочная каретка 10 имеет собственный электрический двигатель, являющийся приводом для лебедочного механизма и дополнительного генератора. Которые служат, соответственно, для подъема-опускания и питания током захватно-срезного устройства 18. Питание электродвигателя каретки происходит от лебедки 7 через электрический грузонесущий кабель 8. В каретку вмонтировано радио дистанционная система управления и видео наведения для захватного устройства 18. Весь комплекс радиосигналов от пульта управления 19 поступает через основную передающую антенну 20 на радио приемные устройства 21, а также радиоантенну на трелевочной каретке.
Аэростатно-канатная система для воздушной заготовки и транспортировки древесины работает следующим образом.
Работа системы на эксплуатационном участке начинается с фиксации сигналов от расставленных по контуру треугольника трех лебедок: основной нижней с высотной мачтой и двух верхних. Зафиксированные сигналы поступают в систему сбора, обработки радиосигналов и расчета координат. Обработав сигнал, система выдает на экране координаты со схемой расположения лебедок, тем самым задавая координаты участка. Координаты в системе координат X, Y, Z подразумевают: удаленность лебедок друг от друга, уровень высоты расположения и т.д.
Далее на установленной треугольной площади участка, происходит фиксация отведенных в рубку деревьев с помощью радио передатчика. Выборку деревьев ведет обученный человек, который подходя к выбранному дереву, и с помощью передатчика посылает сигнал на основную антенну системы. Получив сигнал, компьютерная программа, обработав его, выдает координаты точки нахождения дерева, совмещая их с координатами рабочего контура треугольника.
При наличии множества помеченных деревьев, на мониторе системы управления, отражается такое же количество точек и их координаты. Исходя из этих координат, система автоматически определяет параметры длин, скоростей выбирания для каждого из двух канатов 2 и после команды основного оператора осуществляет автоматическую наводку захватно-срезного устройства на точку нахождения дерева, путем смещения аэростата вправо или влево и последующим перемещением трелевочной каретки по несущему канату в необходимую сторону. Достигнув указанной точки, барабан лебедки 7 затормаживается, тем самым останавливая движение каретки. Поступает сигнал на захватно-срезное устройство конусного типа, которое опускаясь на дерево, частично обрезает ветви для прохода к нижней комельной части основного срезающего устройства и клешневого захвата. Спилив дерево и удерживая его в вертикальном положении, лебедка 7 подымает дерево до определенной точки и также в вертикальном положении переносит его на разгрузочную площадку.
В отличии от аналогов, заявляемое изобретение является максимально экологически эффективно, повышает оперативность цикла валки и трелевки древесины воздушным способом в режиме выборочных рубок, увеличивает площадь охвата обрабатываемого участка и автоматизирует процесс заготовки древесины на выборочных рубках без использования ручного труда вальщика и чокеровщика.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАГОТОВКИ ДРЕВЕСИНЫ НА КРУТЫХ СКЛОНАХ С ИСПОЛЬЗОВАНИЕМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ И АЭРОСТАТНО-КАНАТНОЙ СИСТЕМЫ | 2013 |
|
RU2538825C2 |
| УСТРОЙСТВО ДЛЯ АЭРОСТАТНО-КАНАТНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1991 |
|
RU2027620C1 |
| Разделяющийся грузозахватный механизм восходящего типа движения | 2015 |
|
RU2628511C2 |
| Способ заготовки древесины на горных склонах и устройство для его осуществления | 1990 |
|
SU1793856A3 |
| Способ лебедочной трелевки и устройство для ее осуществления | 2016 |
|
RU2633792C1 |
| СПОСОБ КАНАТНОЙ ТРЕЛЕВКИ ДРЕВЕСИНЫ | 2011 |
|
RU2492630C2 |
| Разделяющийся грузозахватный механизм нисходящего типа движения | 2015 |
|
RU2651813C2 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕК | 2005 |
|
RU2293463C1 |
| Канатная трелевочная установка | 1984 |
|
SU1202939A1 |
| КАНАТНАЯ ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1990 |
|
RU2009919C1 |
Изобретение относится к лесозаготовительной промышленности, в частности к процессу трелевки древесины. Аэростатно-канатная система для воздушной заготовки и транспортировки древесины содержит аэростатный носитель, несущий канат, грузовую каретку, установленную с возможностью перемещения по несущему канату. Система содержит систему канатов с возможностью удержания, с одной стороны, выдвижной высотной мачтой, а с другой стороны - неподвижным аэростатным носителем, который, в свою очередь, также удерживает передвигающуюся по несущему канату каретку, в состав которой входит система захвата и спила растущего дерева. Кроме того, аэростатно-канатная система имеет три управляющих наземных лебедочных механизма, которые установлены с возможностью регулирования перемещения трелевочной каретки как в вертикальной, так и в горизонтальной плоскостях за счет изменения длин и углов канатов. Кроме того, аэростатно-канатная система оборудована радиодистанционным управлением с элементами локальной пеленгации и видеонаведения. В результате повышается оперативность цикла валки и трелевки древесины, увеличение площади охвата обрабатываемого участка и автоматизация процесса заготовки древесины на выборочных рубках, причем без использования ручного труда вальщика и чокеровщика. 2 з.п. ф-лы, 1 ил.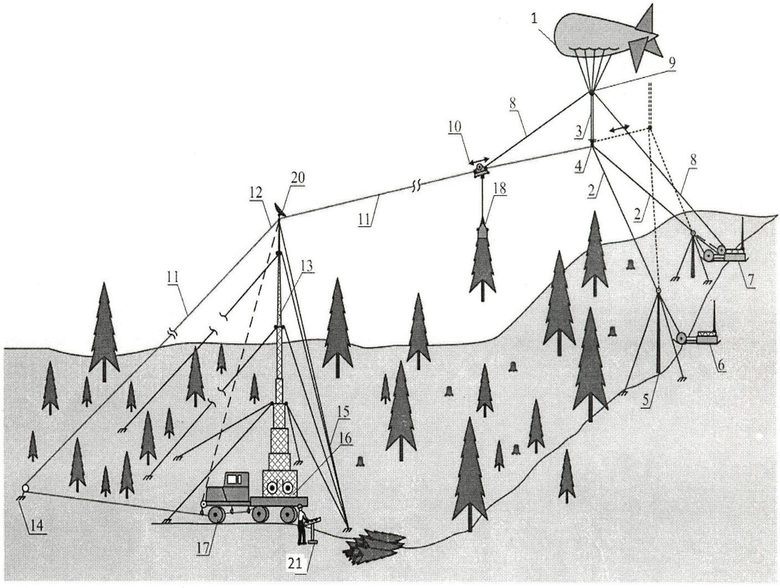
1. Аэростатно-канатная система для воздушной заготовки и транспортировки древесины, содержащая аэростатный носитель, несущий канат, грузовую каретку, установленную с возможностью перемещения по несущему канату, отличающаяся тем, что в устройстве используется система канатов с возможностью удержания, с одной стороны, выдвижной высотной мачтой, а с другой стороны, - неподвижным аэростатным носителем, который, - в свою очередь, - также удерживает передвигающуюся по несущему канату каретку, в состав которой входит система захвата и спила растущего дерева.
2. Аэростатно-канатная система по п.1, отличающаяся тем, что она имеет три управляющих наземных лебедочных механизма, которые установлены с возможностью регулирования перемещения трелевочной каретки как в вертикальной, так и в горизонтальной плоскостях за счет изменения длин и углов канатов.
3. Аэростатно-канатная система по п.2, отличающаяся тем, что она оборудована радиодистанционным управлением с элементами локальной пеленгации и видеонаведения.
| Устройство для транспортирования грузов | 1971 |
|
SU586022A1 |
| ТРЕЛЕВОЧНАЯ УСТАНОВКА | 0 |
|
SU238941A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

