Изобретение относится к заготовке леса, в частности для выполнения грузовых переместительных операций при воздушном способе трелевки без использования ручного труда вальщика и чокеровщика.
Известен механизм для воздушной трелевки вертикально стоящих стволов деревьев содержащий фронтальный грейфер, удерживаемый двумя тросами и служащий для захвата верхней части ствола дерева и последующего его переноса в место разгрузки с помощью вертолета (Патент США 6418989 B1, A01G 23/08, опубликованный 16.07.2002).
Недостатком системы является то, что обрезка ветвей, сучьев с вертикально стоящего дерева и его подпил в комлевой части осуществляется рабочим вальщиком-верхолазом, что снижает оперативность и производительность работ, а также отрицательно влияет на их безопасность.
Наиболее близким по технической сущности и достигаемому результату является механизм для спила и переноса вертикально стоящего дерева и используемый для средств воздушной трелевки, включающий два троса для удержания силовой наклонной балки и шарнирно закрепленного на ней фронтального грейферного захвата с пильным механизмом (Патент США 2009/0000698 А1, опубликованный 01.06.2009).
Однако известный механизм не предусматривает обрезку ветвей и сучьев с вертикально стоящего дерева, а перенос дерева в вертикальном положении без его падения после спила не представляется возможным ввиду перевеса основной части ствола с кроной.
Технической задачей, на решение которой направлено заявленное изобретение, является обеспечение работ, связанных с обрезкой ветвей и сучьев с вертикально стоящих деревьев, удержанием ствола при дальнейшем его спиле и изъятии из полога леса и перемещением с помощью аэростата на разгрузочный пункт.
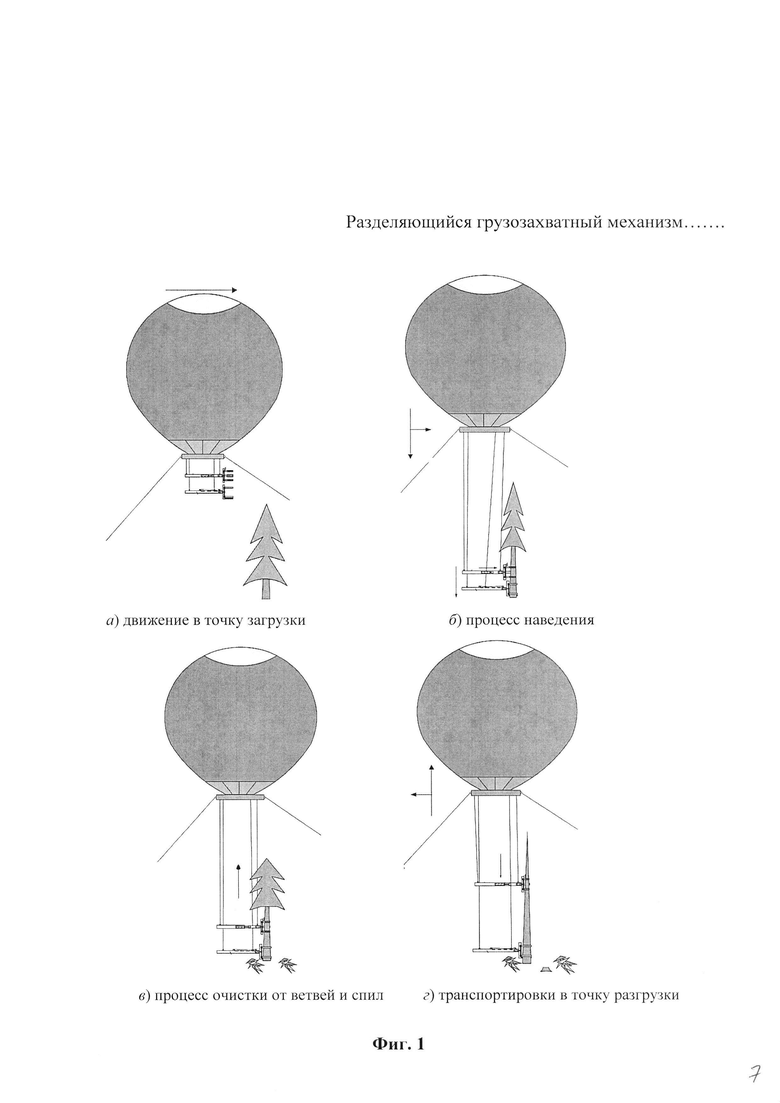
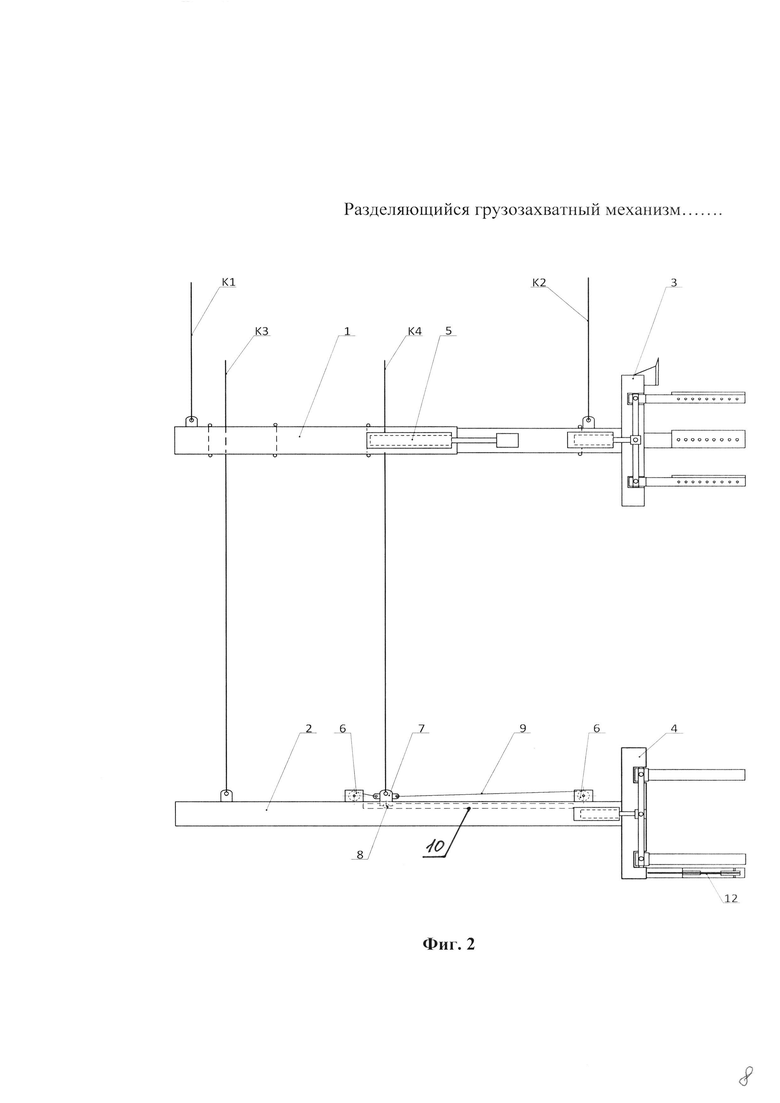
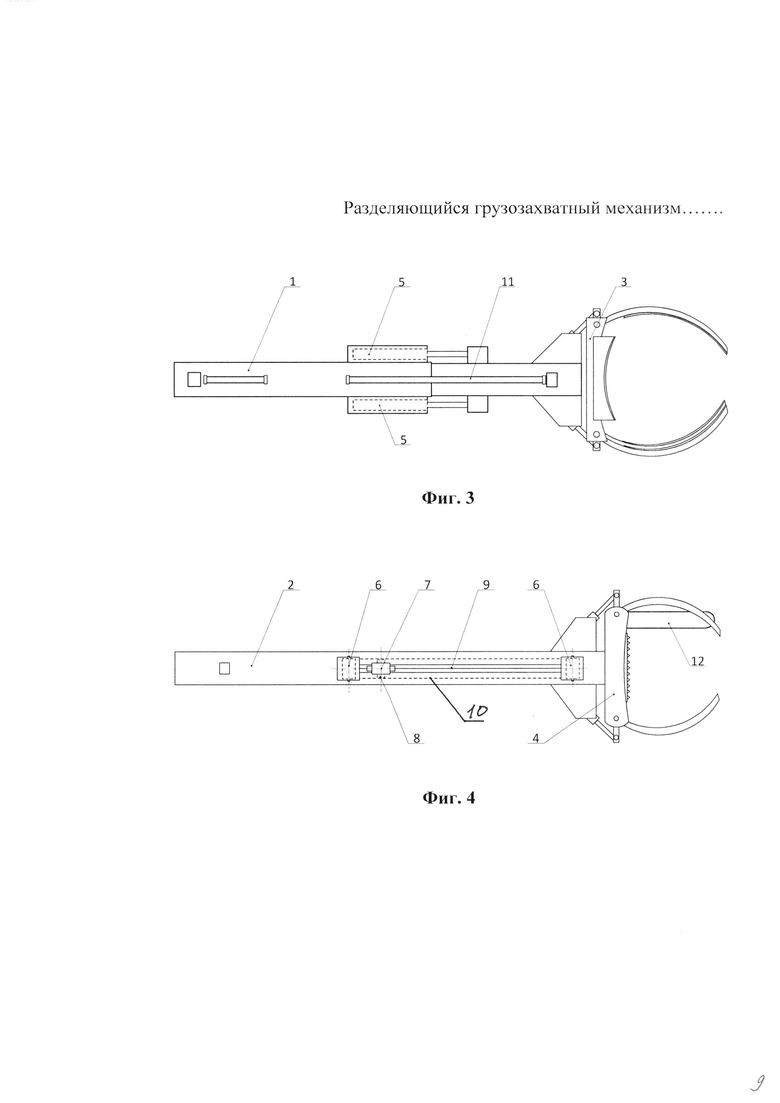
Поставленная задача достигается тем, что удерживаемый аэростатом грузозахватный механизм балочного вида после опускания с помощью четырех бортовых лебедок для обработки вертикально стоящего дерева разделяется на два рабочих узла, где согласно изобретению разделяющийся грузозахватный механизм восходящего типа движения представлен конструкцией, которая состоит из верхнего раздвижного 1 и нижнего 2 независимых друг от друга балочных элементов, на краю которых расположены захватно-срезающий 3 и захватно-пильный 4 механизмы соответственно. Каждая из балок удерживается с помощью двух персональных электрических грузовых канатов К1, К2, К3, К4 и выполняет роль манипулятора, фронтальное наведение которого на ствол дерева выполняется за счет смещения аэростата с помощью наземной лебедки и тягово-возвратных канатов. При этом в момент наведения оба балочных элемента находятся параллельно друг другу и перпендикулярно стволу дерева.
При перемещении в точку загрузки, во избежание колебаний грузовой подвески, верхний и нижний балочные элементы находятся в сомкнутом состоянии. Когда аэростат достигает точки нахождения дерева, происходит его остановка за счет затормаживания работы барабанов наземных лебедок и последующее опускание всех четырех канатов К1, К2, К3, К4 и наведение РГЗМ на комлевую часть дерева с помощью бортового лебедочного комплекса, который находится под оболочкой аэростата. После того, как РГЗМ наведен и находится в перпендикулярном положении относительно ствола дерева, производится его фронтальное перемещение за счет смещения аэростата, управляемого тягово-возвратными канатами наземной лебедки. При достижении РГЗМ комлевой части дерева происходит одновременный захват комля как нижним захватно-пильным устройством 4, так и верхним захватно-срезающим устройством 3. После чего нижний балочный элемент 2 остается на месте, выполняя функции удержания комлевой части / дерева с помощью захватно-пильного устройства 4 и удерживающих его канатов К3, К4, а верхний балочный элемент, подымаясь вверх по стволу с помощью двух канатов К1, К2 и бортовых лебедок, производит срез ветвей по всему стволу дерева с помощью фронтального захватно-срезающего устройства 3. По мере подъема вверх по стволу дерева и, соответственно, уменьшению его диаметра, во избежание перекоса верхнего балочного элемента 1, он оборудован двумя пневматическими цилиндрами 5, которые раздвигают его составные части, тем самым увеличивая его длину на значение уменьшающегося диаметра ствола дерева.
Для распределения центра тяжести и обеспечения устойчивости конструкции в процессе подъема верхнего балочного элемента 1 и очистки дерева от сучьев нижний балочный элемент снабжен двумя маневровыми мини-лебедками 6, выполняющими работу по смещению подвижного кронштейна 7, через который нижний балочный элемент соединен с канатом К2. Смещение данного каната в сторону захватно-пильного устройства 4 дает возможность обеспечить устойчивость в процессе обрезки ветвей и транспортировки ствола дерева. Перемещение кронштейна 7 осуществляется за счет расположенных в нем осевых втулок скольжения 8, которые за счет возвратно-поступательной размотки и смотки каната 9, управляемого лебедками 6, перемещается по канавкам 10, расположенным во внутренней части нижнего балочного элемента 2. Во избежание перегиба каната К4 верхний балочный элемент в центральной своей части имеет вертикально отверстие 11, выполненное по длине, позволяющее канату К4 беспрепятственно смещаться в сторону захватно-срезающего устройства в процессе движения кронштейна 7.
Достигнув вершинной части дерева, верхний балочный элемент останавливается и производит ее захват с помощью захватно-срезающего устройства 3 для последующего удержания в процессе спила ствола дереве, его подъема и транспортировки. Спил очищенного ствола производится электропилой 6, расположенной в захватно-пильном устройстве 4 нижнего силового элемента. После того, как ствол дерева спилен, производится его подъем с использованием бортовой лебедки на рабочую высоту и перемещение на разгрузочный пункт с помощью аэростата, управляемого тягово-возвратными канатами наземной лебедки.
Сущность изобретения поясняется чертежами, где на фиг. 1 - принцип работы РГЗМ восходящего типа движения; на фиг. 2 приведен общий вид механизма с боку; на фиг. 3 - вид сверху верхнего узла РГЗМ; на фиг. 4 - вид сверху нижнего силового узла РГЗМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разделяющийся грузозахватный механизм нисходящего типа движения | 2015 |
|
RU2651813C2 |
| АЭРОСТАТНО-КАНАТНАЯ СИСТЕМА ДЛЯ ВОЗДУШНОЙ ЗАГОТОВКИ И ТРАНСПОРТИРОВКИ ДРЕВЕСИНЫ | 2012 |
|
RU2499706C1 |
| СПОСОБ ЗАГОТОВКИ ДРЕВЕСИНЫ НА КРУТЫХ СКЛОНАХ С ИСПОЛЬЗОВАНИЕМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ И АЭРОСТАТНО-КАНАТНОЙ СИСТЕМЫ | 2013 |
|
RU2538825C2 |
| СИСТЕМА НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ГРУЗОЗАХВАТНОГО МЕХАНИЗМА ДЛЯ АЭРОСТАТНО-КАНАТНОЙ СИСТЕМЫ ТРЕЛЕВКИ | 2013 |
|
RU2531319C1 |
| СПОСОБ ЗАГОТОВКИ ДРЕВЕСНЫХ РЕСУРСОВ | 2012 |
|
RU2504145C2 |
| МЕХАНИЗМ НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ГРЕЙФЕРНОГО ЗАХВАТА ДЛЯ ВОЗДУШНЫХ СИСТЕМ ТРЕЛЕВКИ | 2013 |
|
RU2531322C1 |
| УСТАНОВКА ДЛЯ ЗАГОТОВКИ ДРЕВЕСНЫХ РЕСУРСОВ | 2012 |
|
RU2503172C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕКИ С УСТРАНЕНИЕМ ЗАВИСИМОСТИ РАБОТ ОТ ПРИРОДНЫХ УСЛОВИЙ | 2007 |
|
RU2366161C2 |
| Канатная установка | 1980 |
|
SU1096142A1 |
| УСТАНОВКА ДЛЯ ВОЗДУШНОЙ ТРЕЛЕВКИ ЛЕСА | 1988 |
|
RU2049716C1 |
Изобретение относится к заготовке леса, в частности для выполнения грузовых переместительных операций при воздушном способе трелевки без использования ручного труда вальщика и чокеровщика. Разделяющийся грузозахватный механизм восходящего типа движения включает удерживаемый аэростатом грузозахватный механизм балочного вида, который после опускания с помощью четырех бортовых лебедок для обработки вертикально стоящего дерева разделяется на два рабочих узла. Разделяющийся грузозахватный механизм содержит удерживаемые аэростатом верхний раздвижной и нижний независимые друг от друга балочные элементы, на краю которых расположены захватно-срезающий и захватно-пильный механизмы. Каждый из балочных элементов удерживается на аэростате при помощи двух персональных электрических грузовых канатов и выполняет роль манипулятора, фронтальное наведение которого на ствол дерева выполняется за счет смещения аэростата с помощью наземной лебедки и тягово-возвратных канатов. В момент наведения оба балочных элемента находятся параллельно друг другу и перпендикулярно стволу дерева. Такое выполнение устройства обеспечивает выполнение работ, связанных с обрезкой ветвей и сучьев с вертикально стоящих деревьев, удерживанием ствола при его спиле и изъятии из полога леса и перемещением с помощью аэростата на разгрузочный пункт. 4 з.п. ф-лы, 4 ил.
1. Разделяющийся грузозахватный механизм восходящего типа движения, включающий удерживаемый аэростатом грузозахватный механизм балочного вида, который после опускания с помощью четырех бортовых лебедок для обработки вертикально стоящего дерева разделяется на два рабочих узла, отличающийся тем, что содержит удерживаемые аэростатом верхний раздвижной и нижний независимые друг от друга балочные элементы, на краю которых расположены захватно-срезающий и захватно-пильный механизмы, причем каждый из балочных элементов удерживается на аэростате при помощи двух персональных электрических грузовых канатов и выполняет роль манипулятора, фронтальное наведение которого на ствол дерева выполняется за счет смещения аэростата с помощью наземной лебедки и тягово-возвратных канатов, при этом в момент наведения оба балочных элемента находятся параллельно друг другу и перпендикулярно стволу дерева.
2. Разделяющийся грузозахватный механизм восходящего типа движения по п. 1, отличающийся тем, что захватно-срезающий механизм закреплен на верхнем раздвижном балочном элементе, который выполнен с возможностью подъема вверх по стволу с помощью двух канатов и бортовых лебедок, находящихся под оболочкой аэростата.
3. Разделяющийся грузозахватный механизм восходящего типа движения по п. 2, отличающийся тем, что верхний раздвижной балочный элемент оборудован двумя пневматическими цилиндрами, которые раздвигают его составные части для увеличения его длины на значение уменьшающегося диаметра ствола дерева в процессе подъема верхнего балочного элемента вверх по стволу.
4. Разделяющийся грузозахватный механизм восходящего типа движения по п. 3, отличающийся тем, что для распределения центра тяжести и обеспечения устойчивости конструкции в процессе подъема верхнего балочного элемента и очистки дерева от сучьев нижний балочный элемент снабжен двумя маневровыми мини-лебедками для смещения подвижного кронштейна, через который нижний балочный элемент соединен с канатом.
5. Разделяющийся грузозахватный механизм восходящего типа движения по п. 4, отличающийся тем, что для избежания перегиба грузового каната верхний балочный элемент в центральной своей части имеет вертикальное отверстие, выполненное по длине и позволяющее грузовому канату беспрепятственно смещаться в сторону захватно-срезающего устройства в процессе движения кронштейна.
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 3369673 A, 20.02.1968 | |||
| US 6263932 B1, 24.07.2001 | |||
| ЗАНЕГИН Л.А | |||
| и др., Машины и механизмы для канатной трелевки, Москва, Московский государственный университет леса, 2004, ч | |||
| II, с | |||
| Способ получения жидкой протравы для основных красителей | 1923 |
|
SU344A1 |

