Настоящее изобретение относится к способу управления электрически управляемой стояночной тормозной системой транспортного средства.
Настоящее изобретение также относится к устройству управления электрически управляемой стояночной тормозной системой, при этом устройство управления предназначено для осуществления предлагаемого в изобретении способа.
Транспортные средства, например коммунальные транспортные средства, как правило, оснащены рабочим тормозом, используемым для торможения во время вождения транспортного средства, и независимой от рабочего тормоза стояночной тормозной системой, которая удерживает транспортное средство на месте путем приложения силы торможения в припаркованном состоянии. Рабочий тормоз и стояночная тормозная система концептуально могут быть отнесены к тормозной системе транспортного средства. В современных транспортных средствах рабочий тормоз, равно как и стояночная тормозная система, часто управляются электрически. Соответственно, например, сигналы, вырабатываемые включающими устройствами, передаются устройствам управления рабочим тормозом и стояночной тормозной системы, которые, в свою очередь, управляют работой, т.е., в частности, выключением и включением рабочего тормоза и стояночной тормозной системы. В своих соответствующих выключенных рабочих состояниях рабочий тормоз и стояночная тормозная система не создают тормозного усилия. В своих соответствующих включенных рабочих состояниях рабочий тормоз и стояночная тормозная система соответственно создают тормозное усилие. Выключенный тормоз часто также называют "открытым", а включенный тормоз - "закрытым".
Как правило, переход с фазы, в которой задействуется рабочий тормоз, к фазе, в которой задействуется стояночная тормозная система, имеет место при трогании с места или при остановке. Обязанностью водителя транспортного средства является выключение стояночной тормозной системы вручную с помощью предусмотренного для этой цели включающего устройства при трогании с места, для того чтобы иметь возможность тронуться с места без значительного износа или повреждения.
Несмотря на это, выключение системы стояночного тормоза, как правило, рутинно выполняется водителем, оно, тем не менее, является дополнительным действием, явно выполняемым водителем и требующим по меньшей мере на короткое время его внимания. При выключении системы стояночного тормоза водитель, таким образом, отвлекается по меньшей мере на короткий период времени.
Таким образом, в основу настоящего изобретения была положена задача облегчить работу водителя, чтобы таким образом повысить безопасность движения и уменьшить износ.
Указанная задача решается с помощью изобретения, охарактеризованного признаками независимых пунктов формулы изобретения.
Предпочтительные варианты осуществления изобретения и их дальнейшие модификации раскрыты в зависимых пунктах формулы изобретения.
Настоящее изобретение основано на общем подходе, что перевод электрически управляемой стояночной тормозной системы из включенного рабочего состояния в выключенное рабочее состояние инициируется, если выявлено наличие начального условия, которое не зависит от включающего устройства, предусмотренного для ручного управления электрически управляемой стояночной тормозной системой. Таким образом, водитель транспортного средства может быть освобожден/избавлен от задачи ручного выключения стояночной тормозной системы при трогании транспортного средства с места. Вследствие этого, водитель транспортного средства может полностью сосредоточиться на текущей дорожной ситуации вокруг него, так как его внимание не отвлекается на ручное управление включающим устройством, служащим для выключения системы стояночного тормоза. Кроме того, может быть предотвращено повреждение стояночной тормозной системы вследствие ее дополнительного износа из-за непреднамеренного ручного не выключения стояночной тормозной системы при трогании с места. Транспортное средство может, в частности, быть или представлять собой буксирующее транспортное средство.
В связи с этим может быть предусмотрено, что начальное условие включает в себя по меньшей мере одно из следующих условий:
- водитель присутствует,
- двигатель работает,
- транспортное средство остановлено,
- передача включена,
- дверь кабины транспортного средства закрыта,
- педаль акселератора и/или сцепления нажата.
Вышеуказанные выше условия могут быть использованы для выявления начального условия либо независимо друг от друга, либо в любом их сочетании. Например, можно предположить, что водитель транспортного средства намерен тронуться с места, если транспортное средство остановлено с работающим двигателем, передача включена и педаль акселератора нажата.
Предпочтительно выявление присутствия водителя может осуществляться по меньшей мере по наличию одного из следующих условий:
- датчик присутствия водителя на сиденье указывает наличие веса водителя,
- внутренняя камера кабины указывает, что водитель находится на сиденье водителя,
- педаль акселератора или тормоза или сцепления нажата.
Эти условия являются свидетельством присутствия водителя.
Дополнительно может предусматриваться, что включение рабочего тормоза транспортного средства запрашивается стояночной тормозной системой. Включением рабочего тормоза транспортное средство может удерживаться на месте даже после того, как выключена стояночная тормозная система, и при этом включение рабочего тормоза может быть осуществлено до выключения стояночной тормозной системы. После включения рабочего тормоза рабочий тормоз может быть снова выключен. Таким образом, выключение стояночной тормозной системы может быть осуществлено в несколько стадий, охватывающих задействование рабочего тормоза, в результате чего может быть обеспечено менее резкое уменьшение удерживающих транспортное средство тормозных сил. Таким образом, может обеспечиваться более комфортное трогание с места.
Может предусматриваться прерывание осуществления способа, если выявлено по меньшей мере одно из следующих условий:
- начальное условие не выполняется,
- задействовано включающее устройство,
- присутствие водителя не гарантируется,
- отсутствует или некорректен отклик рабочего тормоза,
- зажигание выключено,
- двигатель выключен.
Приведенные выше случаи по отдельности и/или в любом сочетании могут приводить к прерыванию выполнения способа. Таким образом, инициированное выключение стояночной тормозной системы может быть прервано до окончательного выключения тормозной системы транспортного средства, т.е. транспортного средства, которое не будет автоматически удерживаться тормозным усилием, если имеются сомнения в том, что выключение стояночной тормозной системы должно на самом деле осуществляться в связи с имеющимся у водителя намерением тронуться с места. Кроме того, может быть принята во внимание некорректная связь между рабочим тормозом и стояночной тормозной системой, так что может быть предотвращено неконтролируемое выключение стояночной тормозной системы. Прерывание может приводить к приостановке осуществления способа, при этом способ сохраняется в определенном прерванном состоянии до тех пор, пока не будет продолжен или завершен.
Предпочтительно может предусматриваться продолжение выполнения способа, если выявлено по меньшей мере одно из следующих событий:
- начальное условие снова выполняется,
- присутствие водителя снова гарантируется,
- принята внешняя команда на продолжение способа.
Вышеуказанные события могут как по отдельности, так и в любом сочетании способствовать продолжению осуществления ранее прерванного способа. Если имеет место продолжение осуществления способа, то способ будет продолжен, начиная с определенного прерванного состояния, с этапа алгоритма, на котором он был изначально прерван. Внешняя команда на продолжение осуществления способа может, быть, в частности, выработана электронным блоком управления.
Дополнительно может предусматриваться завершение осуществления способа, если выявлено по меньшей мере одно из следующих событий:
- открывание двери кабины транспортного средства,
- некорректность или отсутствие обратной связи с рабочим тормозом,
- получение внешней команды на завершение способа.
Упомянутые выше события как по одиночке, так и в любом сочетании могут приводить к завершению ранее осуществлявшегося способа. В связи с этим перезапуск способа является либо возможным, либо невозможным в зависимости от события. Например, в случае некорректной или отсутствующей обратной связи с рабочим тормозом перезапуск способа может предотвращаться, так как можно предположить, что существует неисправность, которую необходимо устранить до того, как разумно и/или успешно осуществлять способ. Получение внешней команды на отмену способа может также предотвращать перезапуск способа, например, во время операции обслуживания или в случае неисправности другой системы транспортного средства. Перезапуск способа может быть, к примеру, предотвращен путем сохранения рассматриваемого системного параметра в устройстве управления, осуществляющем способ.
Может предусматриваться выдача сигнала до/во время завершения и/или прерывания способа. Выходной сигнал может быть оптическим и/или акустическим. Например, сигнал может содержать акустический сигнал и/или изменение светового сигнала и/или письменный/символьный вывод на дисплей блока отображения в кабине транспортного средства. Таким образом, например, внимание водителя транспортного средства может быть обращено на то, что автоматическое выключение стояночного тормоза не может быть выполнено в настоящее время. Для завершения и/или прерывания могут предусматриваться различные сигналы. Кроме того, еще один сигнал может предусматриваться для привлечения внимания водителя к тому, что перезапуск способа запрещен, например, в случае неисправности. Такой сигнал может также включать в себя вышеупомянутые компоненты и/или отличаться от вышеупомянутых сигналов.
Кроме того, может предусматриваться завершение способа, если подтверждено выключение рабочего тормоза. После выключения рабочего тормоза транспортное средство находится в нужном состоянии с выключенными как стояночной тормозной системой, так и рабочим тормозом.
Кроме того, может также предусматриваться удержание электрически управляемой стояночной тормозной системы во включенном рабочем состоянии или переход во включенное рабочее состояние, если начальное условие не выявлено или более не выявляется. Таким образом, может быть гарантировано, что транспортное средство всегда находится в безопасном рабочем состоянии, если начальное условие отсутствует или больше не присутствует во время осуществления способа.
Может оказаться полезным предусмотреть, чтобы переход электрически управляемой стояночной тормозной системы с включенного рабочего состояния в выключенное рабочее состояние инициировался, и начинался отсчет заданного времени ожидания, если выявлена неисправность электрически управляемой стояночной тормозной системы и идентифицировано наличие другого начального условия независимо от включающего устройства, предназначенного для ручного управления электрически управляемой стояночной тормозной системой. Таким образом, выключение стояночной тормозной системы может быть разрешено в обход включающего устройства в случае идентификации неисправности стояночной тормозной системы, в частности, в случае неисправности включающего устройства, предусмотренного для ручного управления, и интерфейса между включающим устройством и устройством управления стояночной тормозной системы. Выключение стояночной тормозной системы может осуществляться напрямую без промежуточного включения и выключения рабочего тормоза. Скорость выключения стояночной тормозной системы, которая может служить фактором для определения воспринимаемого комфорта, может задаваться/тонко настраиваться исходя из параметров.
В связи с этим может предусматриваться, что дополнительное начальное условие включает в себя по меньшей мере одно из следующих событий:
- двигатель работает,
- педаль акселератора нажата,
- скорость вращения двигателя превышает заданное пороговое значение,
- крутящий момент двигателя превышает другое заданное пороговое значение,
- дверь кабины транспортного средства закрыта,
- передача включена.
Вышеуказанные условия могут по отдельности, равно как и в любом сочетании, подходить для по меньшей мере частичного определения дополнительных начальных условий.
Кроме того, может предусматриваться, что электрически управляемая стояночная тормозная система переходит в выключенное рабочее состояние по истечении заданного времени ожидания, если в течение заданного времени ожидания идентифицировано дополнительное начальное условие. В связи с этим наличие дополнительного начального условия может проверяться, в частности, в начале и в конце процесса, то есть, когда заданное время ожидания заканчивается. Кроме того, наличие начального условия может по мере необходимости дополнительно или непрерывно проверяться в процессе ожидания. Таким образом, может обеспечиваться, что водитель транспортного средства на самом деле сознательно намеревается выключить стояночную тормозную систему в случае наличия неисправности, в частности, в случае неисправности включающего устройства и/или интерфейса, в обход выключающего устройства и интерфейса между выключающим устройством и устройством управления.
Может оказаться полезным предусмотреть, что заданное время ожидания сбрасывается на ноль и/или останавливается, если дополнительное начальное условие больше не выявляется до истечения заданного времени ожидания. Таким образом, может быть предотвращено, что неосторожное действие водителя транспортного средства приведет к случайному выключению стояночной тормозной системы, которое вообще-то не предусматривалось.
Далее изобретение описывается на примерах предпочтительных вариантов его осуществления со ссылкой на прилагаемые к описанию чертежи, на которых показано:
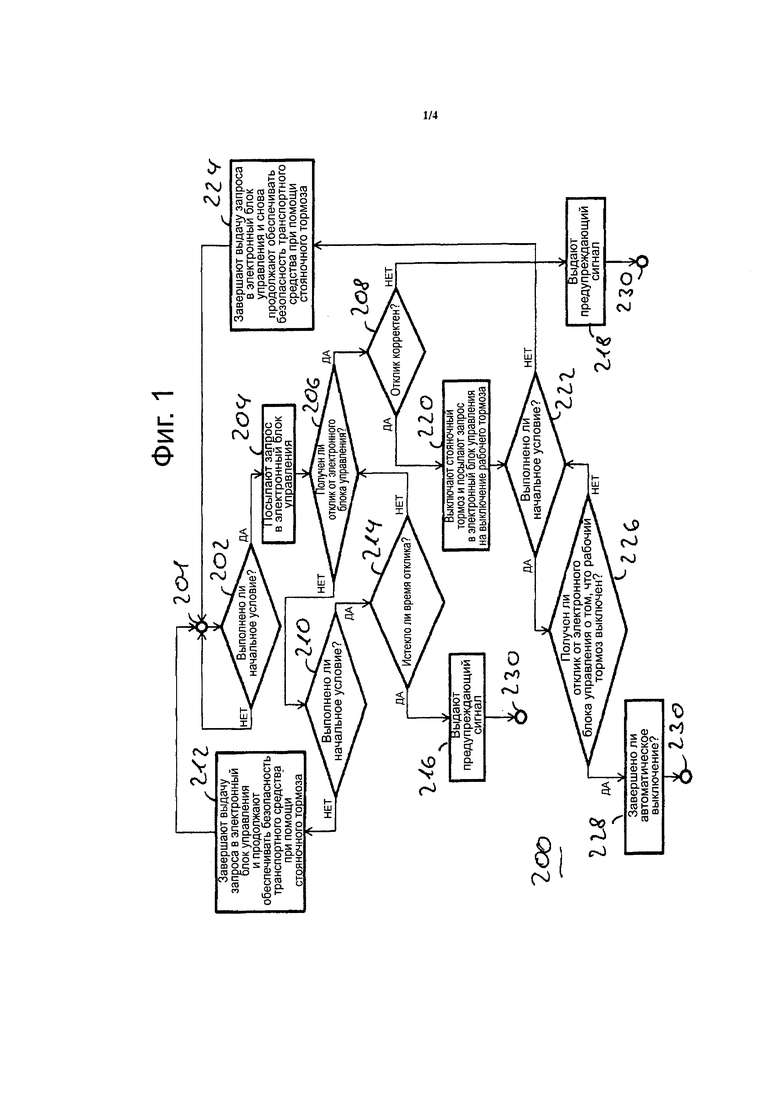
на фиг. 1 - блок-схема последовательности операций способа;
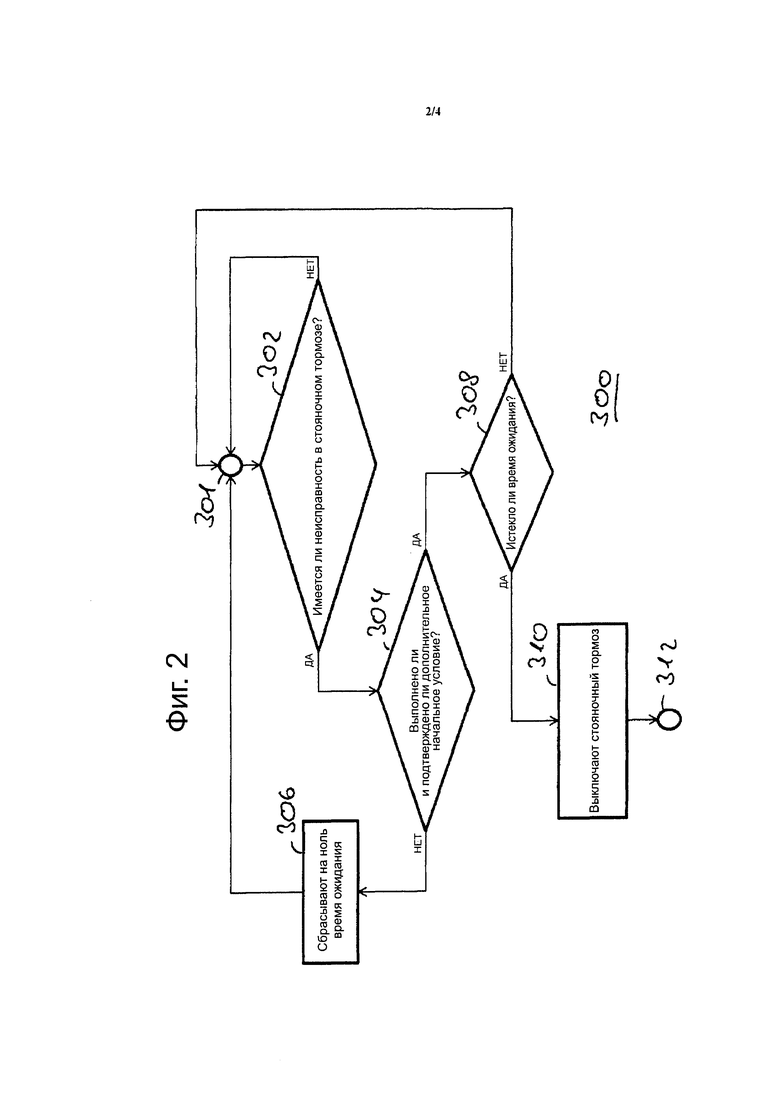
на фиг. 2 - блок-схема последовательности операций модифицированного способа;
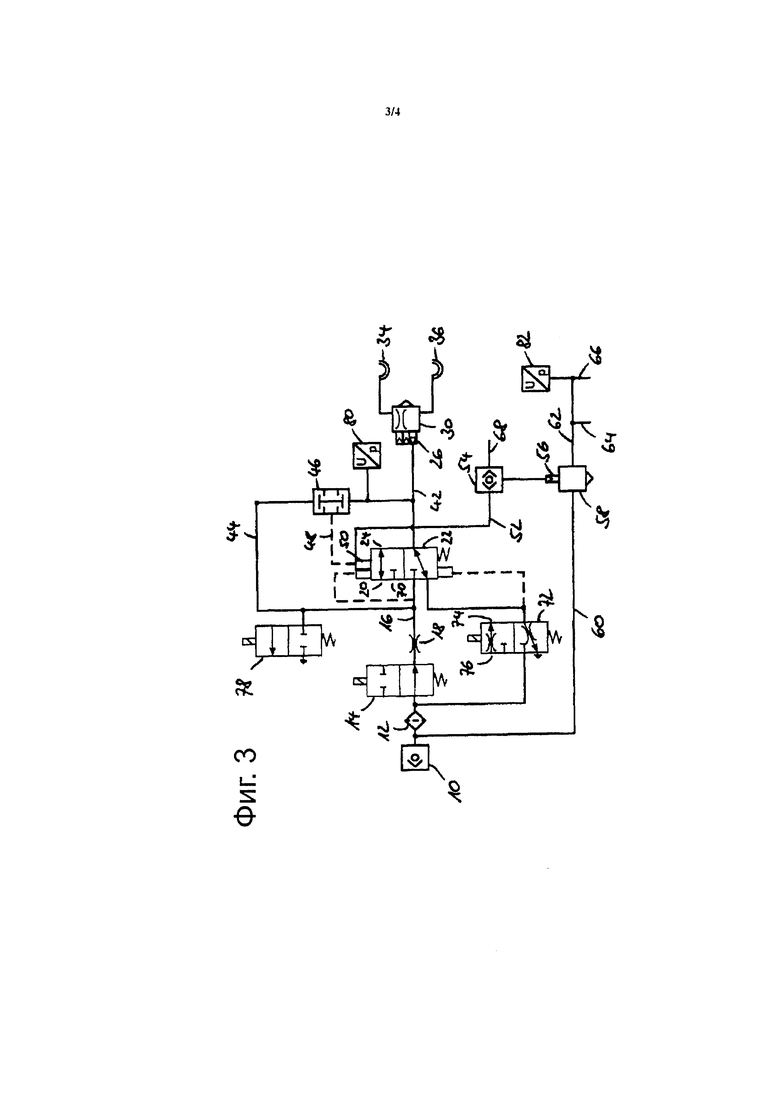
на фиг. 3 - пример схемы электрически управляемой стояночной тормозной системы; и
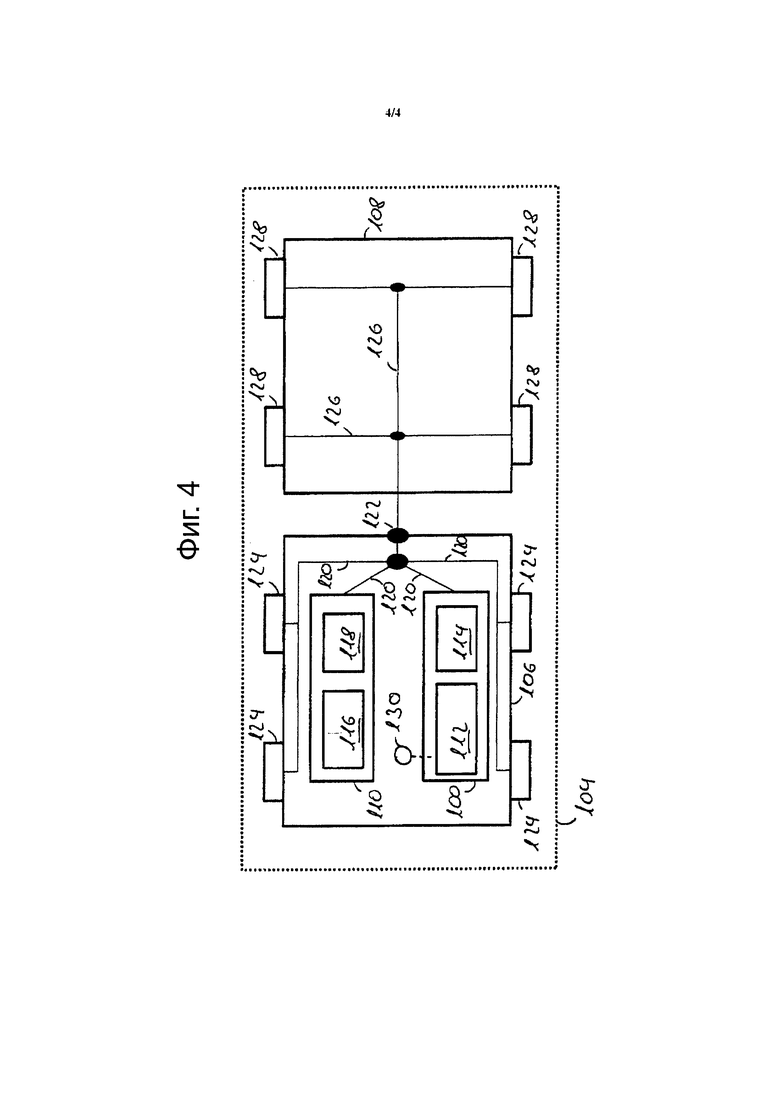
на фиг. 4 - схематичное изображение транспортного средства.
На приведенных чертежах одни и те же позиции обозначают одинаковые или эквивалентные компоненты. Описанные ниже события, условия и похожие ситуации могут регулярно обнаруживаться с помощью предусмотренных в транспортном средстве датчиков.
На фиг. 1 показана блок-схема последовательности операций способа. Показанный на фиг. 1 способ 200 может применяться для перевода электрически управляемой стояночной тормозной системы из включенного рабочего состояния в выключенное рабочее состояние. Способ 200 может, например, реализовываться с помощью устройства управления электрически управляемой стояночной тормозной системы. Показанный на фиг. 1 способ 200 может, например, начинаться или запускаться с этапа 201. На этапе 201 могут, например, проверяться условия, которые необходимы для осуществления способа 200. Например, может быть проверено, установлен ли системный параметр, который предотвращает осуществление или начало осуществления способа 200. Кроме того, по возможности может быть осуществлена проверка на предмет выявления неисправностей. Если неисправность выявлена, может быть запущен, к примеру, показанный на фиг. 3 модифицированный способ. Начиная с начального этапа 201, на этапе 202 может быть проверено, выполняется ли начальное условие. Начальное условие может включать в себя проверку того, работает ли двигатель транспортного средства, в частности приводной двигатель, стоит ли транспортное средство, включена ли передача, закрыта ли дверь кабины транспортного средства, нажата ли педаль акселератора и/или сцепления. Такая проверка может быть реализована с помощью имеющихся на транспортном средстве датчиков. Если начальное условие не выполняется - НЕТ на этапе 202 - способ может быть перезапущен на этапе 201. Если исходное условие выполняется - ДА на этапе 202 - процесс может быть продолжен с этапа 204. На этапе 204 может быть направлен запрос в электронный блок управления. Электронный блок управления может, в частности, быть устройством управления рабочим тормозом. Запрос может, к примеру, содержать общее подтверждение работоспособности рабочего тормоза и команду на включение рабочего тормоза. Таким образом, может, например, быть гарантировано, что стояночная тормозная система не выключится, если рабочее давление рабочего тормоза не достаточно высоко. Когда запрос отправлен в электронный блок управления, может начаться отсчет заданного периода времени ожидания, в течение которого ожидается ответ на запрос от электронного блока управления. Начиная с этапа 204, процесс может быть продолжен с этапа 206. На этапе 206 может быть проверено, был ли ответ от электронного блока управления на запрос, посланный на этапе 204. Если ответ от электронного блока управления был получен - ДА на этапе 206 - процесс может быть продолжен с этапа 208. Если ответ от электронного блока управления не получен - НЕТ на этапе 206 - процесс может быть продолжен с этапа 210. На этапе 208 может быть проверено, является ли ответ от электронного блока управления корректным. Если ответ от электронного блока управления не является корректным - НЕТ на этапе 208 - процесс может быть продолжен с этапа 218. Если ответ от электронного блока управления корректен - ДА на этапе 208 - процесс может быть продолжен с этапа 220. Некорректный ответ может, например, иметь место в случае нарушения или прерывания связи между устройством управления, осуществляющим способ 200, и электронным блоком управления, то есть, например, устройством управления рабочим тормозом. Некорректный ответ также возможен в случае неисправности электронного блока управления и/или рабочего тормоза. Таким образом, термин "некорректный" следует понимать в рамках настоящей заявки, как не согласующийся с ожидаемой реакцией.
На этапе 210 оно может быть повторно проверено, выполняется ли или пока еще не выполняется начальное условие. Если начальное условие не выполняется - НЕТ на этапе 210 - процесс может быть продолжен с этапа 212. Если начальное условие выполняется - ДА на этапе 210 - процесс может быть продолжен с этапа 214. На этапе 212 запрос, направленный в электронный блока управления на этапе 204, может быть завершен, и транспортное средство может далее удерживаться на месте с помощью стояночной тормозной системы. Начиная с этапа 212, способ 200 может быть перезапущен на этапе 201. На этапе 214 может быть проверено, истекло ли уже заданное время отклика, отсчет которого был начат на этапе 204. Если время отклика еще не истекло - НЕТ на этапе 214 - процесс может быть продолжен с этапа 206. Если время отклика уже истекло - ДА на этапе 214 - процесс может быть продолжен с этапа 216. На этапе 216 может выдаваться предупредительный сигнал, который может привлечь внимание оператора к тому, что на запрос, направленный в электронный блок управления на этапе 204, ответ в течение заданного времени отклика не получен. Отсутствие отклика электронного блока управления может указывать на неисправность, препятствующую нормальному осуществлению способа 200. На этапе 216 может быть установлен системный параметр, предотвращающий последующий перезапуск способа 200 из-за предполагаемой неисправности. Предупредительный сигнал на этап 216 может включать в себя несколько компонентов. Например, предупредительный сигнал может быть акустическим и/или визуальным и, в частности, включать в себя акустический сигнал и/или мигание сигнальной лампы и/или письменное уведомления на дисплее бортового компьютера. Предупредительный сигнал может уведомлять водителя о возникшей/предполагаемой неисправности. Начиная с этапа 216, процесс может быть продолжен с этапа 230.
Аналогично этапу 216, предупредительный сигнал, который может уведомлять водителя транспортного средства о том, что ожидаемый от электронного блока управления отклик не корректен, например аномален, может также выдаваться на этапе 218. Это также может указывать на неисправность. Предупредительный сигнал на этапе 218 может иметь вид, аналогичный предупредительному сигналу, уже известному из этапа 216. На этапе 218 может быть установлен системный параметр, предотвращающий последующий перезапуск способа 200 из-за предполагаемой неисправности. Начиная с этапа 218, процесс также может быть продолжен с этапа 230. Если ожидаемый от электронного управляющего устройства отклик корректен - ДА на этапе 208 - стояночная тормозная система может быть сначала выключена, то есть открыта на этапе 220, и затем может быть направлен запрос в электронный блок управления, чтобы был выключен рабочий тормоз, который был включен в результате запроса на этапе 204. После этого процесс может быть продолжен с этапа 222. На этапе 222 может быть повторно проверено начальное условие, уже известное из этапов 202 и 210. Если начальное условие не выполняется - НЕТ на этапе 222 - процесс может быть продолжен с этапа 224. Если начальное условие выполняется - ДА на этапе 222 - процесс может быть продолжен с этапа 226. На этапе 224 запрос на выключение рабочего тормоза, выданный в электронный блок управления на этапе 220, может быть завершен, и стояночная тормозная система может быть снова включена, чтобы постоянно обеспечивать безопасное рабочее состояние транспортного средства. Вслед за этапом 224 способ 200 может быть перезапущен на этапе 201. На этапе 226 может быть проверено исходя из ожидаемого отклика от электронного блока управления, выключен ли рабочий тормоз. Если ожидаемый отклик от электронного блока управления, указывающий, что рабочий тормоз выключен, не получен - НЕТ на этапе 226 - процесс может вернуться к этапу 222. Если ответ от электронного блока управления имеется - ДА на этапе 226 - процесс может быть продолжен с этапа 228. Вполне возможно предоставление дополнительного времени для отклика, аналогично времени отклика, известного из этапа 204, для ответа электронного блока управления, указывающего, что рабочий тормоз выключен. Если дополнительное время отклика истекло без ответа от электронного блока управления, процесс может быть затем продолжен с этапа 224. На этапе 228 может быть установлено, что автоматическое выключение стояночной тормозной системы завершено. Таким образом, выключение стояночной тормозной системы в соответствии со способом 200 может включать в себя промежуточное включение рабочего тормоза, чтобы обеспечить менее резкое начало процесса, которое может восприниматься как более комфортное и требующее меньшего внимания со стороны водителя. Начиная с этапа 228, процесс может быть продолжен с этапа 230. На этапе 230 способ может заканчиваться. Перезапуск способа 200 на этапе 201 после его завершения на этапе 230 может стать возможным, если будут выполнены требуемые условия, например, повторно включена стояночная тормозная система, и за это время не установлен ни один из системных параметров, которые предотвращают перезапуск способа 200. При необходимости время отклика или оставшееся время отклика может отображаться для водителя визуально и/или акустически, например, в письменном виде на дисплее бортового компьютера в кабине водителя, в виде меняющегося светового сигнала, или меняющегося акустического сигнала. Точно так же при необходимости и дополнительное время отклика или оставшееся дополнительное время отклика может отображаться для водителя визуально и/или акустически, например, в письменном виде на дисплее бортового компьютера в кабине водителя, в виде меняющегося светового сигнала, или меняющегося акустического сигнала.
На фиг. 2 показана блок-схема последовательности операций модифицированного способа. Модифицированный способ 300 может, например, начаться с этапа 301. Начиная с этапа 301, сначала на этапе 302 может проверяться, выявлена ли неисправность стояночной тормозной системы, в частности неисправность управляющего, т.е. выключающего устройства и/или интерфейса между выключающим устройством и устройством управления стояночной тормозной системы. Если неисправность не имеет места - НЕТ на этапе 302 - модифицированный способ 300 может быть перезапущен на этапе 301. Если неисправность выявлена/выявляется - ДА на этапе 302 - отсчет заданного времени ожидания может быть начат или продолжен, и процесс может быть продолжен с этапа 304. На шаге 304 может быть проверено, выполняется ли дополнительное начальное условие. Дополнительное начальное условие может включать в себя выявление фактов работы двигателя, в частности приводного двигателя, нажатия педали акселератора, превышения частотой вращения двигателя заданного порогового значения, превышения крутящим моментом двигателя еще одного заданного порогового значения, закрытия двери кабины транспортного средства и/или включения передачи. Дополнительное начальное условие может выявляться с помощью предусмотренных на транспортном средстве датчиков. Если дополнительное начальное условие не выполняется - НЕТ на этапе 304 - процесс может быть продолжен с этапа 306. Если дополнительное начальное условие выполняется - ДА на этапе 304 - процесс может быть продолжен с этапа 308. На этапе 306 заданное время ожидания, отсчет которого был начат на этапе 302, может быть сброшено на ноль. Начиная с этапа 306, модифицированный способ 300 может быть перезапущен с этапа 301. На этапе 308 может быть проверено, истекло ли заданное время ожидания. Если время ожидания еще не истекло - НЕТ на этапе 308 - процесс может быть продолжен с этапа 301. Если время ожидания уже истекло - ДА на этапе 308 - процесс может быть продолжен с этапа 310. На этапе 310 стояночная тормозная система может быть выключена. Модифицированный способ 300 может затем закончиться на этапе 312.
Показанный на фиг. 2 модифицированный метод 300 может, к примеру, базироваться на известном из фиг. 1 способе 200, например, начинаться с этапа 301 периодически или в случае, если проверка требуемых предварительных условий на этапе 201 оказалась неуспешной. До перезапуска модифицированного способа 300 на этапе 301 может регулярно осуществляться этап 201 показанного на фиг. 1 способа 200, например, для переключения между модифицированным способом 300 и способом 200. При необходимости время ожидания или остающееся время ожидания может быть визуально и/или акустически представлено водителю, например, на дисплее бортового компьютера в кабине транспортного средства, в виде меняющегося светового сигнала, или меняющегося акустического сигнала.
На фиг. 3 показан пример схемы электрически управляемой стояночной тормозной системы. Показанная электрически управляемая стояночная тормозная система 100 может соединяться с непоказанной на чертежах системой обработки воздуха под давлением посредством обратного клапана 10. После обратного клапана 10 может следовать дополнительный фильтр 12, через который сжатый воздух может поступать к подающему электромагнитному клапану 14, который может быть выполнен в виде 2/2-распределителя. Первый рабочий соединительный патрубок 20 регулирующего клапана 22 может соединяться с выходом подающего электромагнитного клапана 14 посредством участка 16 подающей линии и дополнительного дросселя 18. Регулирующий клапан 22 может быть выполнен в виде пневматически управляемого 3/2-распределителя. Второй рабочий соединительный патрубок 24 регулирующего клапана 22 может соединяться с входом 26 управления модуля 30 управления прицепом. Модуль 30 может управлять подающим соединительным патрубком 34 и управляющим соединительным патрубком 36 сцепного приспособления для прицепа. Ветви 42, 44 линии управления прицепом могут соединяться с входами избирательного низкоскоростного клапана 46, выход которого может соединяться с входом 50 управления регулирующего клапана 22 с помощью линии 48 управления. Избирательный низкоскоростной клапан 46 может работать таким образом, что на его выход, т.е. в линию 48 управления, выдается наименьшее из входных давлений, то есть наименьше из давлений двух ветвей 42,44 линии управления прицепом. Линия 48 управления может дополнительно соединяться с входом 56 управления ускорительного клапана 58 с помощью линии 52 управления ускорительным клапаном и перекидного клапана 54. Ускорительный клапан 58 может снабжаться сжатым воздухом от точки, расположенной выше по потоку подающего электромагнитного клапана 14, с помощью подающей линии 60 ускорительного клапана. Отводящая линия 62 ускорительного клапана может вести к ответвлениям 64, 66, к которым могут подсоединяться непоказанные на чертеже цилиндры накопления энергии. Кроме того, с перекидным клапаном 54 может соединяться линия 68 рабочего тормоза. Соединительный патрубок 74 регулирующего и выпускного клапана 72 может соединяться с вентиляционным отверстием 70 регулирующего клапана 22. В другой соединительный патрубок 76 регулирующего и выпускного клапана 72 может подаваться сжатый воздух из точки, находящейся между фильтром 12 и подающим электромагнитным клапаном 14. Кроме того, может предусматриваться выпускной электромагнитный клапан 78, выполненный в виде 2/2-распределителя, который может соединяться с участком 16 подающей линии. Кроме того, могут предусматриваться датчики давления 80, 82 для определения давления во втором рабочем соединительном патрубке регулирующего клапана 22, а также в отводящей линии 62 ускорительного клапана. Датчик давления 80 может, например, измерять давление переключения электрически управляемой стояночной тормозной системы 100. Давление подачи электрически управляемой стояночной тормозной системы 100 может быть, например, измерено с помощью непоказанного на чертеже датчика давления, устанавливаемого между обратным клапаном 10 и фильтром 12.
Показанная на фиг. 3 электрически управляемая стояночная тормозная система 100 может дополнительно содержать непоказанное на данном чертеже первое устройство управления, а также непоказанное на данном чертеже ручное включающее устройство. Включающее устройство может соединяться с первым устройством управления через интерфейс. Включающее устройство может быть предназначено для ручного выключения и включения стояночной тормозной системы 100, а также для ручной реализации функции проверки прицепа.
На фиг. 4 показан схематичный вид транспортного средства. На фиг. 4 схематично показано транспортное средство 104, которое может содержать буксировочный автомобиль 106 и прицеп 108. Транспортное средство 104 может содержать электрически управляемую стояночную тормозную систему 100 и рабочий тормоз 110. Электрически управляемая стояночная тормозная система 100 может, в свою очередь, содержать первое устройство 112 управления и электромагнитный клапан 114, который может управляться первым устройством 112 управления. Матрица 114 электромагнитных клапанов может, например, соотноситься или ассоциироваться со схемой, показанной на фиг. 3. Электрически управляемая стояночная тормозная система 100 может соединяться пневматической линией 120 с по меньшей мере одним колесным тормозом 124, установленным по меньшей мере на одной оси буксирующего автомобиля 106. Кроме того, электрически управляемая стояночная тормозная система 100 может соединяться пневматической линией 120 с пневматической сцепкой 122 прицепа. Пневматическая сцепка 122 прицепа может ассоциироваться с модулем управления прицепа 30 или соединительным патрубком 36 управления. Аналогично, рабочий тормоз 110 может содержать второе устройство 116 управления и матрицу 118 клапанов. Кроме того, рабочий тормоз 110 может также быть подключен пневматическими линиями 120 по меньшей мере к одному колесному тормозу 124 и к пневматической сцепке 122 прицепа. В связи с этим для специалиста в данной области техники очевидно, что пневматическая линия 120 только предполагает пневматические соединения между рабочим тормозом 110, электрически управляемой стояночной тормозной системой 100, пневматической сцепкой 122 прицепа и колесными тормозами 124 в виде, например, комбинированного цилиндра, расположенного в районе по меньшей мере одного колесного тормоза 124, содержащего два независимых друг от друга пневматических соединительных патрубка для рабочего тормоза 110 и стояночной тормозной системы, которые независимо соединены с электрически управляемой стояночной тормозной системой 100 и рабочим тормозом 110.
Прицеп 108 может быть пневматически соединен со сцепкой 122 прицепа, в которой давления пневматического управления могут передаваться по меньшей мере одному колесному тормозу 128 прицепа 108 с помощью по меньшей мере одной пневматической линии 126. Применительно по меньшей мере к одному колесному тормозу 128 прицепа комбинированные цилиндры также могут предусматриваться по меньшей мере таким образом, что по меньшей мере одна пневматическая линия 126, аналогичная пневматическим линиям 120 буксирующего автомобиля 106, может также иллюстрировать в упрощенном виде существующие соединения.
Отличительные признаки изобретения, раскрытые в вышеприведенном описании, на чертежах, а также в формуле изобретения как по отдельности, так и в любом сочетании могут иметь важное значение для реализации изобретения.
Группа изобретений относится к области транспортного машиностроения. Способ управления электрически управляемой стояночной тормозной системой транспортного средства заключается в том, что переход электрически управляемой стояночной тормозной системы из включенного рабочего состояния в выключенное рабочее состояние инициируется, если выявлено наличие начального условия. Наличие начального условия не зависит от включающего устройства, предназначенного для ручного управления стояночной тормозной системой, и/или используется для выключения стояночной тормозной системы, если включающее устройство неисправно. Включение рабочего тормоза транспортного средства запрашивается стояночной тормозной системой. Достигается повышение безопасности движения. 2 н. и 12 з.п. ф-лы, 4 ил.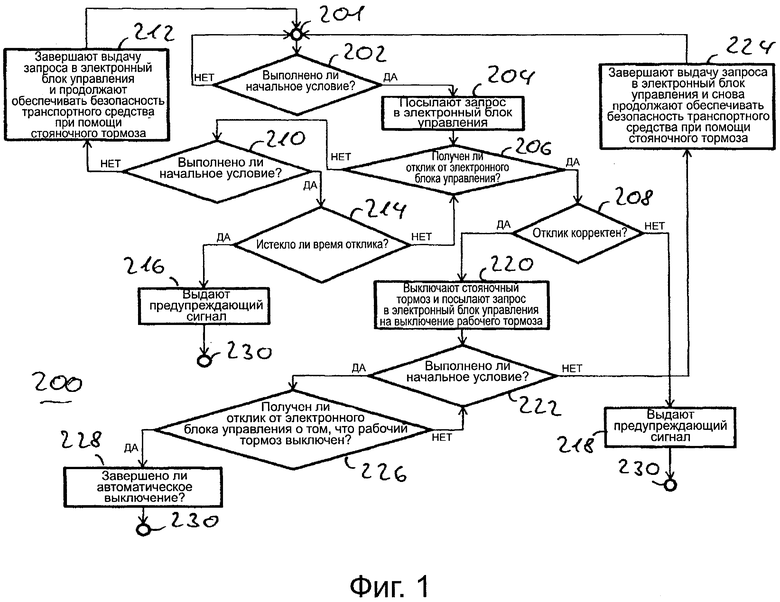
1. Способ (200) управления электрически управляемой стояночной тормозной системой (100) транспортного средства (104), причем перевод электрически управляемой стояночной тормозной системы (100) из включенного рабочего состояния в выключенное рабочее состоянии инициируют, если выявлено наличие начального условия, которое не зависит от включающего устройства (130), предназначенного для ручного управления электрически управляемой стояночной тормозной системой (100), и/или выключают стояночную тормозную систему (100), если включающее устройство (130) неисправно, отличающийся тем, что включение рабочего тормоза (110) транспортного средства (104) запрашивается стояночной тормозной системой (100).
2. Способ по п. 1, отличающийся тем, что начальное условие включает в себя по меньшей мере одно из следующих условий:
- водитель присутствует,
- двигатель работает,
- транспортное средство (104) неподвижно,
- передача включена,
- дверь кабины транспортного средства (104) закрыта,
- педаль акселератора и/или сцепления нажаты.
3. Способ по п. 2, отличающийся тем, что наличие водителя выявляется при выполнении по меньшей мере одного из следующих условий:
- переключатель сиденья указывает на наличие массы водителя,
- внутренняя камера кабины показывает, что водитель находится на водительском сиденье,
- нажата педаль акселератора или тормоза или сцепления.
4. Способ по любому из пп. 1-3, отличающийся тем, что осуществление способа (200) прерывают, если выявлено по меньшей мере одно из следующих событий:
- не выполнено начальное условие,
- задействовано включающее устройство (130),
- не гарантировано присутствие водителя,
- отсутствует или некорректен отклик рабочего тормоза (110),
- выключено зажигание,
- выключен двигатель.
5. Способ по п. 4, отличающийся тем, что продолжают осуществление способа, если выявлено по меньшей мере одно из следующих событий:
- снова выполнено начальное условие,
- снова гарантировано присутствие водителя.
- получение внешней команды на продолжение способа.
6. Способ по п. 4, отличающийся тем, что завершают осуществление способа, если выявлено по меньшей мере одно из следующих событий:
- открывание двери кабины транспортного средства (104),
- отсутствие или некорректность обратной связи с рабочим тормозом (110),
- получение внешней команды на завершение способа.
7. Способ по п. 4, отличающийся тем, что до/во время завершения и/или прерывания способа (200) выдается сигнал.
8. Способ по любому из пп. 1-3, отличающийся тем, что способ завершают, если подтверждено выключение рабочего тормоза (110).
9. Способ по любому из пп. 1-3, отличающийся тем, что электрически управляемую стояночную тормозную систему (100) оставляют во включенном рабочем состоянии или переводят в выключенное рабочее состояние, если начальное условие не выявлено или более не выявляется.
10. Способ по любому из пп. 1-3, отличающийся тем, что инициируют переход электрически управляемой стояночной тормозной системы из включенного рабочего состояния в выключенное рабочее состояние и начинают отсчет времени ожидания, если выявлена неисправность в электрически управляемой стояночной тормозной системе (100), и выявлено наличие дополнительного начального условия, независящего от включающего устройства (130), предусмотренного для ручного управления электрически управляемой стояночной тормозной системой (100).
11. Способ по п. 10, отличающийся тем, что дополнительное начальное условие предусматривает по меньшей мере одно из следующих событий:
- двигатель работает,
- педаль акселератора нажата,
- скорость вращения двигателя превышает заданное пороговое значение,
- крутящий момент двигателя превышает еще одно заданное пороговое значение,
- дверь кабины транспортного средства (104) закрыта,
- передача включена.
12. Способ по п. 10, отличающийся тем, что электрически управляемую стояночную тормозную систему (100) переводят в выключенное рабочее состояние по истечении заданного времени ожидания, если в течение заданного времени ожидания выявлено дополнительное начальное условие.
13. Способ по п. 10, отличающийся тем, что заданное время ожидания сбрасывается на ноль и/или останавливается, если дополнительное начальное условие более не выявляется до истечения заданного времени ожидания.
14. Устройство управления (112) электрически управляемой стояночной тормозной системой (100) транспортного средства (104), отличающееся тем, что устройство управления (112) предназначено для осуществления способа (200) по любому из пп. 1-13.
| DE 10357121 A1, 07.07.2005 | |||
| DE 102009046495 A1, 12.05.2011 | |||
| DE 102007026223 A1, 11.12.2008 | |||
| DE 102008034915 A1, 28.01.2010 | |||
| RU 2008152783 A, 20.07.2010 | |||
| Система регулирования тормозных сил многоосного транспортного средства | 1989 |
|
SU1652140A1 |

