О
сл кэ
I
тальных осей путем умножения вычисленной величины удельной осевой тормозной силы задающей оси на измеряемую величину нагрузки на соответствующую ось, а также осуществляет сравнение вычисленной величины требуемой тормозной силы для
данной оси с действительной измеренной величиной тормозной силы этой оси и вырабатывает соответствующие команды для подачи на обмотки соответствующих электромагнитных клапанов регуляторов давления. 1 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХСТУПЕНЧАТАЯ СИСТЕМА ТОРМОЖЕНИЯ С ЭЛЕКТРОПНЕВМАТИЧЕСКИМ УПРАВЛЕНИЕМ ДЛЯ МНОГООСНОГО ДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2405694C2 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| Устройство для предотвращения перегрузки тормозного механизма автомобиля с электропневматическим тормозным приводом | 1986 |
|
SU1540651A3 |
| Электропневматическая противоблокировочная тормозная система транспортного средства | 1990 |
|
SU1710402A1 |
| ЭЛЕКТРООБОРУДОВАНИЕ АВТОМОБИЛЯ ИЛИ АВТОПОЕЗДА ИЗ ТЯГАЧА И, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПРИЦЕПА | 2018 |
|
RU2727630C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2362692C2 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| Система питания сжатым воздухом тормозного привода | 1988 |
|
SU1527051A1 |
| Электропневматическая тормозная система транспортного средства | 1982 |
|
SU1090599A2 |
| Электропневматический тормозной привод транспортного средства | 1988 |
|
SU1594029A1 |
Изобретение относится к тормозным системам автотранспортных средств. Цель изобретения повышение эффективности торможения путем обеспечения равенства удельных осевых тормозных сил на всех осях во всем диапазоне реализуемого сцепления колес с поверхностью дороги. В каждом контуре разделенного по осям тормозного привода, кроме одного, являющегося задающим, установлены регуляторы 6 и 7 давления с электромагнитными клапанами, осуществляющие изменение давления в приводе в соответствии с командами электронного блока 8 управления. Блок 8 вычисляет удельную тормозную силу задающей оси путем деления измеренной величины тормозной силы этой оси на измеренную величину нагрузки на эту ось, требуемые величины тормозных сил для каждой из ос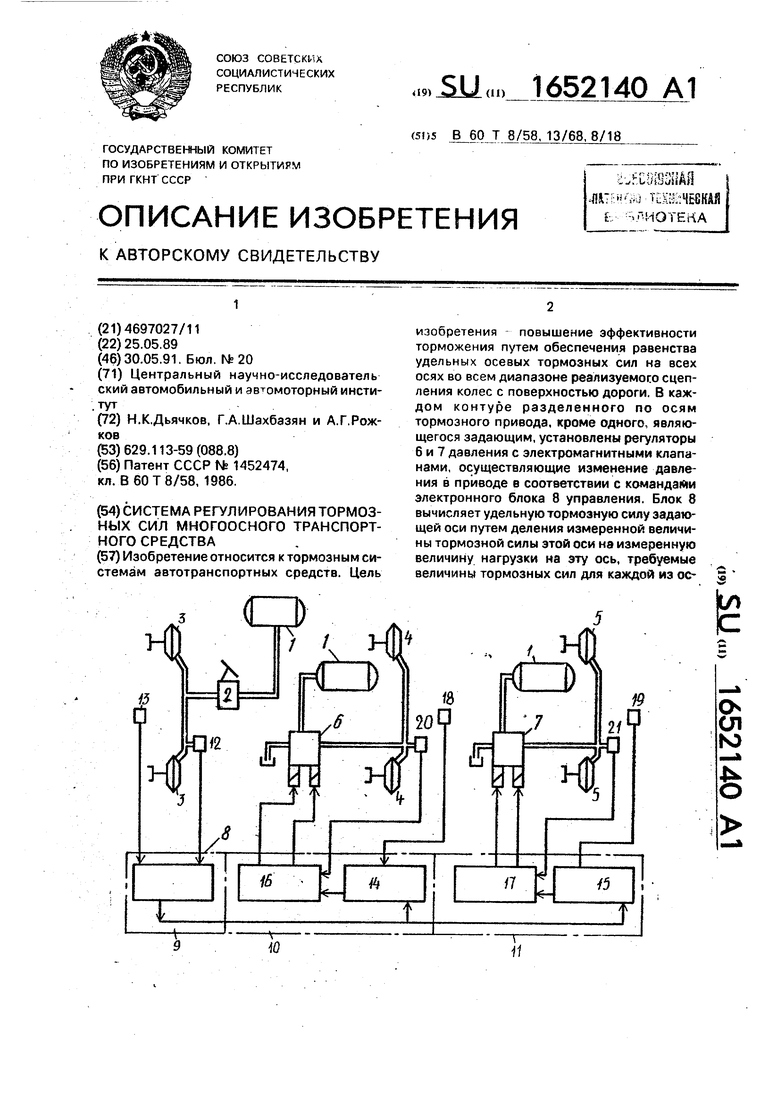
Изобретение относится к тормозным системам транспортных средств, в частности к системам регулирования тормозных сил.
Цель изобретения - повышение эффективности торможения многоосного транспортного средства путем обеспечения равенства удельных осевых тормозных сил на всех осях во всем диапазоне реализуемо - го сцепления колес с поверхностью дороги.
На чертеже показана электропневматическая система регулирования тормозных сил.
Система содержит воздушные ресиверы 1 (питающая часть пневмопривода не изображена), управляемый педалью тормозной кран 2, тормозные камеры 3 передней оси и тормозные камеры 4 и 5 остальных осей, образующие независимые контуры тормозного привода. Величина давления в камерах 4 и 5 независимо регулируется соответственно электропневматическими регуляторами 6 и 7 по сигналам электронного блока 8 управления, состоящего из секции 9 определения удельной тормозной силы передней (задающей) оси и секций 10 и 11 выработки команд управления электропневматическими регуляторами 6 и 7, Секция 9 представляет собой вычислительный блок, осуществляющий деление сигнала датчика 12 давления в переднем контуре, пропорционального тормозной силе передней оси, на сигнал датчика 13 давления в пневмоподвеске передней оси, пропорциональной нагрузке на переднюю ось. Выходной сигнал секции 9 подается на входы секций 10 и 11, содержащих, соответственно, вычислительные блоки 14,15 умножения и логические блоки 16, 17. Блоки 14, 15 осуществляют перемножение сигнала удельной тормозной силы передней оси на сигналы соответствующих датчиков 18, 19 осевых нагрузок и определяют, таким образом, требуемые величины осевых тормозных сил соответствующих осей. Логические блоки 16 и 17, сравнивая полученные сигналы требуемых тормозных сил с сигналами датчиков 20 и 21 давления в соответствующих контурах, пропорциональными создаваемым осевым тормозным силам, вырабатывают в зависимости от соотношения сравниваемых сигналов управляющие команды, подаваемые на электромагнитные клапаны
злектропневматических регуляторов б и 7. которые осуществляют повышение, понижение или выдержку давления в соответствующих контурах с целью поддержания требуемых уровней давления в тормозных
камерах 4 и 5, обеспечивая выполнение с заданной точностью условия равенства удельных тормозных сил на всех осях многоосного транспортного средства. Функции элементов 9. 14. 15. 16 и 17 электронного
блока могут быть реализованы как путем построения отдельных функциональных блоков, так и с помощью программируемого микропроцессора.
Система регулирования тормозных сил
работает следующим образом.
При необходимости торможения транспортного средства водитель нажимает на педаль тормозного крана 2, обеспечивая повышение давления в тормозных камерах 3
задающей оси и создание тормозной силы на колесах этой оси, пропорциональной давлению в камерах 3. Датчик 12 давления вырабатывает пропорциональный давления электрический сигнал, поступающий на
первый вход секции 9, осуществляющий деление этого сигнала на величину сигнала датчика 13 нагрузки, поступающего на второй вход секции 9. Результирующий сигнал на выходе секции 9, пропорциональный
удельной тормозной силе задающей оси, поступает на первые входы блоков 14 и 15 умножения, на вторые входы которых подаются сигналы от датчиков 18 и 19, измеряющих нагрузки на соответствующие оси.
Результирующие выходные сигналы блоков 14 и 15, соответствующие требуемым величинам осевых тормозных сил, подаются на первые входы блоков 16 и 17 сравнения, вторые входы которых связаны с датчиками
20 и 21 давления в тормозных камерах 4 и 5 соответствующих осей. Когда сигналы требуемых тормозных сил превышают уровни сигналов датчиков 20 и 21,блоки 16 и 17 подают командные сигналы на закрытие выпускных и открытие впускных электромагнитных клапанов электропневматических регуляторов б и 7 давления, обеспечивая сообщение ресиверов 1 с тормозными камерами 4 или 5. Когда вследствие повышения давления сигналы датчиков 20 и 21 достигнут требуемого уровня (в пределах заданной точности), блоки 16 и 17 подают сигналы на закрытие впускных клапанов, а если сигналы датчиков превысят требуемый уровень (что происходит и при растормаживании), блоки 16 и 17 подают сигналы на открытие выпускных клапанов регуляторов 6 и 7, обеспечивая сообщение тормозных камер 4 или 5 с атмосферой и снижение давления в камерах до требуемого уровня.
Формула изобретения Система регулирования тормозных сил многоосного транспортного средства, содержащая устройства для измерения осевых тормозных сил и нагрузок на каждую ось, подключенные к входам электронного блока управления, выходы которого связаны с обмотками электромагнитных клапанов регуляторов давления, осуществляющих изменение или поддержание на задаваемом уровне давления в тормозных камерах контуров тормозного привода, о т- личающаяся тем, что, с целью повышения эффективности торможения путем обеспечения равенства удельных осевых тормозных сил на всех осях во всем диапазоне реализуемого сцепления колес с поверхностью дороги, регуляторы давления установлены во всех контурах разделенного по осям тормозного привода, кроме одного контура, являющегося задающим, а электронный блок управления представляет собой вычислительное устройство, осуществляющее вычисление удельной тормозной силы задающей оси путем деления измеренной величины тормозной силы на измеренную величину нагрузки на эту ось,
вычисление требуемых величин тормозных сил для каждой из остальных осей путем умножения вычисленной величины удельной тормозной силы задающий оси на измеренную величину нагрузки на
соответствующую ось, сравнение вычисленной величины требуемой тормозной силы для данной оси с действительной измеренной величины тормозной силы этой оси и, в зависимости от соотношения сравниваемых
величин, выработку управляющих команд для подачи на обмотки соответствующих электромагнитных клапанов регуляторов давления в каждом из управляемых ими контуров тормозного привода.
| Устройство управления торможением транспортного средства | 1986 |
|
SU1452474A3 |
| кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
