Уровень техники
Изобретение относится к устройству контроля систем транспортного средства по пп.1 и 2 формулы.
Из уровня техники, например из DE 69402117 Т2, известна электронная тормозная система (EBS) с системой контроля тормозов.
В настоящее время электронные тормозные системы (EBS) включают в себя устройства самоконтроля и уровни перехода в аварийный режим, которые опираются только на собственные или находящиеся на шине транспортного средства измеренные значения.
Задача изобретения
Задача изобретения заключается в усовершенствовании устройства контроля описанного выше рода таким образом, чтобы оно обеспечивало улучшенный контроль неисправностей и их более точную локализацию.
Эта задача решается согласно изобретению посредством признаков независимых пунктов формулы.
Раскрытие изобретения
Согласно первому варианту предложено устройство контроля систем транспортного средства, по меньшей мере, некоторые из которых содержат режим самоконтроля, а некоторые - режим внешнего контроля других систем и не предназначены для выполнения собственных функций или для самоконтроля, причем при обнаружении в режиме самоконтроля первой системы нарушения или ошибки по меньшей мере одной, выполняемой ею функции, вторая система активируется первой системой, имеющей неисправность или сбой, или в режиме внешнего контроля третьей системы, контролирующей эту первую систему, с тем чтобы с помощью исполнительных устройств и/или датчиков, относящихся ко второй системе, обнаружить и/или локализовать нарушение или сбой по меньшей мере одной функции первой системы и/или чтобы активировать аварийную программу второй системы для замены нарушенной функции первой системы.
При этом особые программы контроля во второй системе инициируются первой системой посредством команд, передаваемых по шине данных, и выполняются во второй системе. Их результаты сообщаются первой системе также по шине данных и обрабатываются там, при необходимости, вместе с общими данными, которые определяет сама первая система и/или которые стандартным образом передаются по шине транспортного средства. Для этого вторая система использует свои датчики и/или исполнительные устройства при определенных обстоятельствах также с помощью данных на шине транспортного средства. Инициирование программ и обработка результатов могут осуществляться также третьей системой, например центральным компьютером транспортного средства, если первая система сообщила о соответствующей неисправности или соответствующая неисправность первой системы была обнаружена контролирующей ее третьей системой.
Поскольку первая и вторая системы, в частности стояночная и электронная рабочая тормозные системы транспортного средства, как правило, содержат в разных местах датчики и исполнительные системы, можно лучше обнаружить ошибочное поведение системы транспортного средства, в частности его тормозной системы, и/или локализовать причины. Это позволяет повысить безопасность и облегчить ремонт. Кроме того, можно избежать ненужных мероприятий по ремонту, которые пришлось бы осуществлять, если действительные причины нарушения функции были не известны.
В случае дефекта в одной из систем существует также возможность выполнения соответствующих функций другой системой - возможно с ограниченной функциональностью (резервная функция). Выполнение этой функции, имеющей неисправность первой системы, может инициироваться третьей системой, например центральным компьютером транспортного средства, если она обнаружила неисправность в первой системе, или самостоятельно второй системой, если она на основе собственных измеренных значений или данных на шине транспортного средства или при отсутствии этих данных обнаруживает, что первая система неисправна. Этим достигается повышенная готовность систем к работе.
В качестве второго варианта предложено устройство контроля систем транспортного средства, по меньшей мере, некоторые из которых содержат режим самоконтроля, а некоторые - режим внешнего контроля других систем, которые не предназначены для собственных функций или для самоконтроля, причем при обнаружении второй системы в режиме внешнего контроля нарушения или ошибки по меньшей мере одной функции, выполняемой первой из систем, активируется аварийная программа второй системы для замены нарушенной функции первой системы.
Предпочтительные модификации и усовершенствования изобретения характеризуются признаками, приведенными в зависимых пунктах формулы.
Предпочтительно в режиме самоконтроля и/или внешнего контроля обнаруживают ошибку или сбой по меньшей мере одной функции первой системы на основе вида сигналов, модулированных первой системой, и/или на основе их отсутствия.
Особенно предпочтительно, первая система является электронной стояночной тормозной системой (ЕСРВ), а вторая система - электронной рабочей тормозной системой (EBS) тягача автопоезда.
Ниже более подробно описан пример осуществления изобретения.
Краткое описание чертежей
Ниже пример осуществления изобретения показан на чертежах и более подробно поясняется в описании. На чертежах:
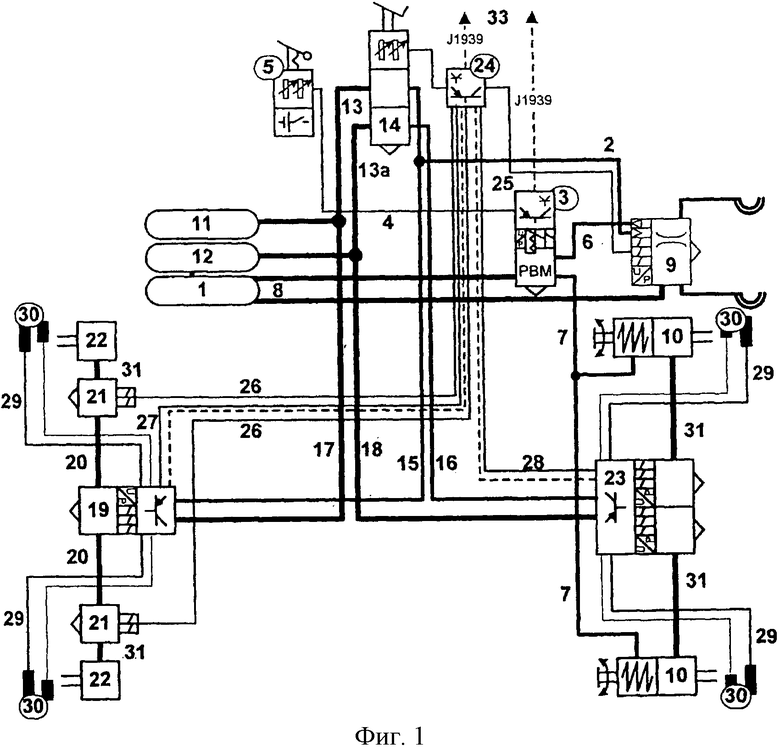
фиг.1 - блок-схема тормозной системы тягача автопоезда, включающая в себя электронную стояночную тормозную систему (ЕСРВ) с модулем стояночного тормоза (РВМ) и электронную рабочую тормозную систему (EBS) с модулем управления прицепом (ТСМ);
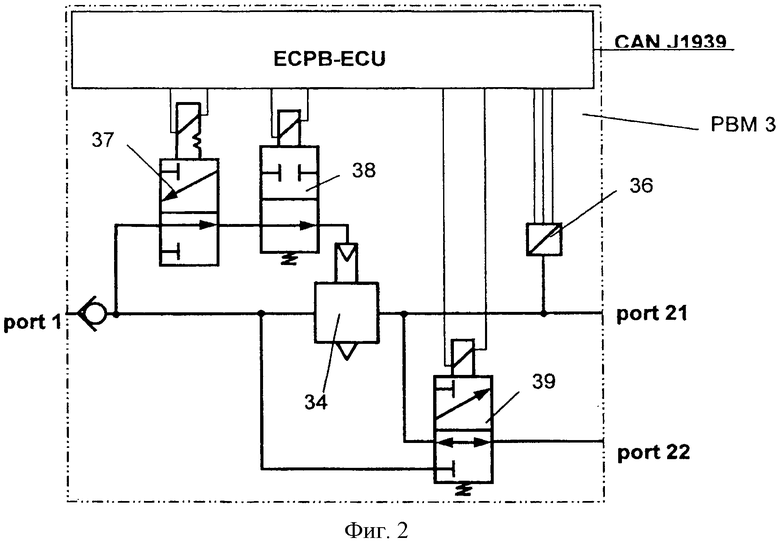
фиг.2 - блок-схема модуля стояночного тормоза (РВМ) из фиг.1;
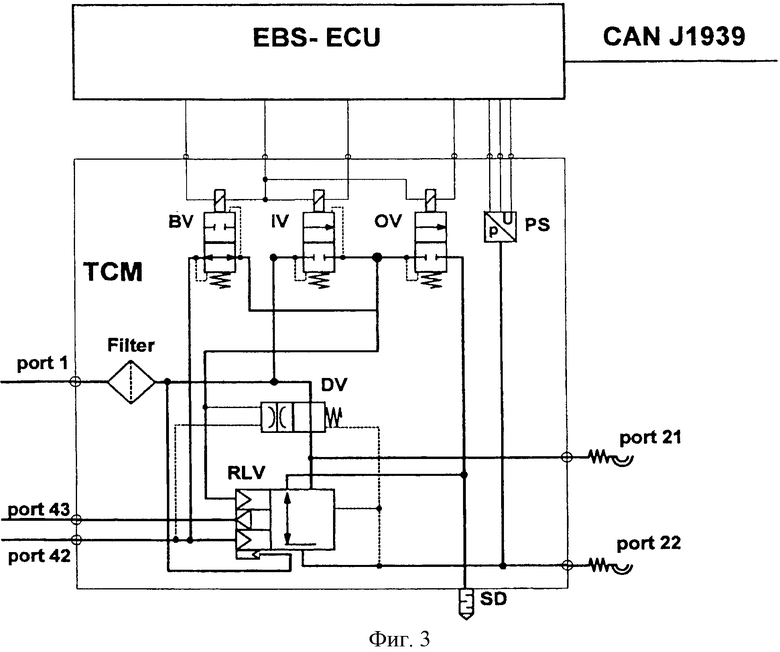
фиг.3 - блок-схема модуля управления прицепом (ТСМ) из фиг.1.
Осуществление изобретения
Схематично изображенная на фиг.1 тормозная система тягача автопоезда включает в себя электронную стояночную тормозную систему с модулем стояночного тормоза (РВМ) и электронную рабочую тормозную систему (EBS) с модулем управления прицепом (ТСМ). Более подробно тормозная система включает в себя:
- пневмоаккумулятор 1;
- пневматическую управляющую магистраль 2, ведущую от модуля ножного тормоза (FBM) 14 к модулю управления прицепом (ТСМ) 9;
- модуль стояночного тормоза (РВМ) 3;
- электрические управляющие линии 4 для модуля стояночного тормоза (РВМ) 3;
- механизм ручного управления 5 для модуля стояночного тормоза (РВМ) 3;
- пневматические управляющие магистрали 7 между модулем стояночного тормоза (РВМ) 3 и тормозными цилиндрами 10 с пружинным энергоаккумулятором заднего моста;
- магистрали подачи сжатого воздуха 8 между пневмоаккумулятором 1 и модулем стояночного тормоза (РВМ) 3 и модулем управления прицепом (ТСМ) 9;
- модуль управления прицепом (ТСМ) 9;
- тормозные цилиндры 10 с пружинным энергоаккумулятором заднего моста;
- пневмоаккумулятор 11;
- пневмоаккумулятор 12;
- магистраль подачи сжатого воздуха 13 от пневмоаккумулятора 11 к модулю ножного тормоза 14;
- магистраль подачи сжатого воздуха 13а от пневмоаккумулятора 12 к модулю ножного тормоза 14;
- модуль ножного тормоза 14;
- пневматическую управляющую магистраль 15 между модулем ножного тормоза 14 и одноканальным модулем 19 регулирования давления переднего моста;
- пневматическую управляющую магистраль 16 между модулем ножного тормоза 14 и двухканальным модулем 23 регулирования давления заднего моста;
- магистраль подачи сжатого воздуха 17 между пневмоаккумулятором 11 и модулем 19 регулирования давления переднего моста;
- магистраль подачи сжатого воздуха 18 между пневмоаккумулятором 12 и модулем 23 регулирования давления заднего моста;
- модуль 19 регулирования давления переднего моста;
- напорные магистрали 20 между модулем 19 регулирования давления переднего моста и клапанами 21 управления давлением;
- клапаны 21 управления давлением для функции АБС переднего моста, например клапаны «выбор низкого», «выбор высокого» или «интеллектуальный выбор»;
- рабочие тормозные цилиндры 22 переднего моста;
- двухканальный модуль 23 регулирования давления заднего моста;
- блок управления (ECU) 24 электронной тормозной системой (EBS);
- электрические управляющие линии 25 между блоком управления (ECU) 24 электронной тормозной системой (EBS) и модулем управления прицепом (ТСМ) 9;
- электрические управляющие линии 26 между блоком управления (ECU) 24 электронной тормозной системой (EBS) и клапанами 21 управления давлением переднего моста;
- линии электропитания и CAN шина 27 между блоком управления (ECU) 24 электронной тормозной системой (EBS) и модулем 19 регулирования давления переднего моста;
- линии электропитания и CAN шина 28 между блоком управления (ECU) 24 электронной тормозной системой (EBS) и модулем 23 регулирования давления заднего моста;
- измерительные кабели 29;
- датчики 30 скорости вращения колес;
- тормозные напорные магистрали 31 между клапанами 19 управления давлением и рабочими тормозными цилиндрами 22 переднего моста и между модулем 23 регулирования давления и тормозными цилиндрами 10 с пружинным энергоаккумулятором заднего моста;
- линии CAN шины (Control Area Network) 33, например J1939.
На заднем мосту тягача помимо тормозных цилиндров 10 с пружинным энергоаккумулятором расположены также рабочие тормозные цилиндры (на фиг.1 не показаны). Предпочтительно рабочие тормозные цилиндры и тормозные цилиндры с пружинным энергоаккумулятором объединены в виде комбинированных цилиндров.
Конструкция модуля ножного тормоза (FBM) 14 для электронной рабочей тормозной системы (EBS) аналогична традиционным с пневматическим ножным тормозным клапаном (FBV). Дополнительно в модуле ножного тормоза (FBM) 14 регистрируются электронные заданные значения для регулирования тормозного усилия. Таким образом, модуль ножного тормоза (FBM) 14 выполняет две задачи:
- два резервных датчика (например, потенциометры) регистрируют пожелание водителя осуществить торможение за счет того, что они измеряют путь срабатывания толкателя модуля FBM. Измеренное значение резервно передается на центральный блок управления BBS-ECU 24 и преобразуется в нем в требование торможения;
- аналогично традиционному ножному тормозному клапану FBV происходит управление пневматическим управляющим давлением в соответствии с путем срабатывания. Это управляющее давление требуется для резервного управления в случае дефекта электронной рабочей тормозной системы EBS.
Модули 19, 23 регулирования давления образуют интерфейс между электронной рабочей тормозной системой EBS и пневматическим тормозным усилием. Они преобразуют передаваемое по шине данных CAN J1939 заданное давление торможения в пневматическое давления. Преобразование происходит с помощью пропорциональных магнитов или комбинации впускных и выпускных магнитов. Датчик давления измеряет отрегулированное тормозное давление. Таким образом, регулирование тормозного давления может происходить в замкнутом регулирующем контуре. Электрически активированный магнитный резервный клапан перекрывает пневматическое управляющее давление модуля ножного тормоза FBM 14, обеспечивая электрическое регулирование давления без искажения.
Установка модулей 19, 23 регулирования давления в колесные ступицы обеспечивает подключение датчиков 30 скорости вращения колес и износа тормозных колодок по коротким электрическим линиям. Эти сигналы передаются по шине данных CAN J1939 на центральный блок управления EBS-ECU 24.
Электронный модуль управления прицепом ТСМ 9 обеспечивает регулирование управляющего давления, прицепа в соответствии с функциональными требованиями электронной рабочей тормозной системы EBS. Пределы диапазонов электрорегулирования установлены законодательными требованиями. Преобразование заданного электронным путем значения в отрегулированное давление осуществляется с помощью такого же магнитного устройства, что и в модулях 19, 23 регулирования давления. Блокирование резервного давления происходит в зависимости от конструктивного принципа через электромагнитный резервный клапан BV (фиг.3) или за счет пневматической задержки.
Управление модулем управления прицепом ТСМ 9 должно осуществляться в любых нормальных условиях двумя независимыми управляющими сигналами. Это могут быть два пневматических сигнала из двух управляющих контуров или один пневматический и один электрический управляющие сигналы. Однако в этом случае электрический управляющий сигнал должен быть в распоряжении в любых регулярных эксплуатационных состояниях.
Срабатывание модуля ножного тормоза FBM 14 приводит к расчету пожелания торможения в центральном блоке управления EBS-ECU 24. Одновременно активируются электромагнитные резервные клапаны в модулях 19, 23 регулирования давления, и блокируется пневматическое управляющее давление. Электронный блок управления EBS-ECU 24 рассчитывает в зависимости от пожелания торможения, массы транспортного средства, распределения нагрузок на мосты и т.д. оптимальное тормозное давление. Это заданное тормозное давление передается по шине данных CAN J1939 на модули 19, 23 регулирования давления.
В соответствии с расположением модули 19, 23 подают тормозное давление в тормозные цилиндры 22. По CAN ISO 11992 соответствующее управляющему давлению прицепа пожелание торможения передается в электронную рабочую тормозную систему EBS прицепа.
Для таких функций, как ASR (противобуксовочная система) или ESP (электронная система поддержания курсовой устойчивости), независимо от пожелания водителя в модулях 19, 23 создается тормозное давление, которое подается в тормозные цилиндры 22.
Модуль стояночного тормоза (РВМ) 3 (на фиг.2) включает в себя:
- релейный клапан 34, который в зависимости от давления в управляющей камере регулирует давление в рабочей камере, соответствующее давлению на соединительном порте 21 модуля стояночного тормоза 3, связанном посредством пневматических управляющих магистралей 7 (фиг.1) с тормозными цилиндрами 10 заднего моста с пружинным энергоаккумулятором;
- датчик давления 36, который измеряет давление в рабочей камере релейного клапана 34;
- бистабильный электромагнитный 3/2-распределитель 37 для непрерывной подачи воздуха в управляющую камеру релейного клапана 34 или удаления воздуха из нее;
- электромагнитный 2/2-распределитель 38 для поддержания давления в управляющей камере релейного клапана 34;
- электромагнитный 3/2-распределитель 39 (тестовый электромагнит) для подачи давления в рабочей камере релейного клапана 34 или давления на соединительном порте 1 к соединительному порту 22 прицепа;
- блок управления ECPB-ECU 40 стояночного тормозного устройства ЕСРВ, который управляет распределителями 37-39 и принимает сигналы от датчика давления 36, а также подключен к шине данных CAN J1939.
Блок управления прицепом ТСМ 9 на фиг.3 включает в себя:
- релейный клапан RLV с тройным управлением;
- резервный клапан BV;
- впускной клапан IV;
- выпускной клапан OV;
- дроссельный клапан DV;
- датчик давления PS для измерения давления в тормозной магистрали прицепа, соединенной с портом 22, который ведет к соединительной головке «тормоз» тягача и питает прицеп управляющим давлением для торможения;
- соединительный порт 22, который ведет к соединительной головке «ресивер» тягача и питает прицеп давлением из ресивера;
- соединительный порт 43, к которому посредством пневматической управляющей магистрали 6 подключен порт 22 модуля стояночного тормоза (РВМ) 3 (фиг.2);
- соединительный порт 42, к которому подключена ведущая от модуля ножного тормоза (FBM) 14 пневматическая управляющая магистраль 2 и в который подается пневматическое управляющее давление модуля ножного тормоза (FBM) 14;
- соединительный порт 1, к которому подключен пневморесивер 1;
- выпуск воздуха SD, соединенный с выпускным клапаном OV.
Управление клапанами DV, IV, OV модуля управления прицепом (ТСМ) 9 осуществляется блоком управления EBS-ECU 24 электронной рабочей тормозной системой (EBS), который, в свою очередь, соединен с шиной данных CAN J1939.
Таким образом, в тягаче установлены блок управления ECPB-ECU 40 (фиг.2) электронной стояночной тормозной системой ЕСРВ и блок управления EBS-ECU 24 электрически управляемым рабочим тормозным устройством EBS, которые соединены с общей шиной данных, например CAN J1939. В этом случае возникает возможность взаимного контроля и более точной локализации неисправностей в стояночной ЕСРВ и рабочем EBS тормозных системах.
Если водитель включает стояночный тормоз, приводя в действие механизм ручного управления 5, то ведущая от порта 22 модуля стояночного тормоза РВМ 3 (фиг.2) к порту 43 модуля управления прицепом ТСМ 9 (фиг.3) пневматическая управляющая магистраль 6 должна быть продута, поскольку модули управления прицепом инвертируют поданное со стороны управления давление, так что порт 22 модуля управления прицепом ТСМ 9 должен быть продут, чтобы привести тормоза прицепа в затянутое положение. Поэтому пневматика модуля управления прицепом ТСМ 9, относящегося к электронной рабочей тормозной системе EBS, должна создавать давление в управляющей магистрали к прицепу (обратное управление давлением), т.е. на порте 22. Это давление на порте 22 модуля управления прицепом ТСМ 9 регистрируется датчиком PS в модуле ТСМ 9 и передается на EBS-ECU 24, который представляет собой блок управления электронной рабочей тормозной системой EBS.
Через шину данных CAN J1939 в качестве соединения для осуществления связи между EBS-ECU 24 - блоком управления электронной рабочей тормозной системой EBS и ECPB-ECU 40 - блоком управления стояночным тормозным устройством ЕСРВ, ECPB-ECU 40 может запрашивать давление на порте 22 модуля управления прицепом ТСМ 9. Если давление на порте 22 не создано, то функция стояночного тормоза нарушена или давление из ресивера на порте 1 стояночного тормозного модуля РВМ 3 или на порте 1 модуля управления прицепом ТСМ 9 слишком низкое.
При условии, что продувка тормозного цилиндра 10 с пружинным энергоаккумулятором в тягаче прошла успешно, возможны следующие неисправности.
1. Отсутствует давление из ресивера на порте 1 модуля управления прицепом ТСМ 9:
- переданное по шине данных CAN J1939 на ECPB-ECU 40 значение давления в ресивере равно нулю;
- не происходит индикации неисправности, поскольку это может быть нормальное рабочее состояние в процессе пневмопитания, если, например, пневморесивер еще не заполнен;
- отсутствует уровень перехода в аварийный режим (резервный), поскольку на состояние пневмопитания не влияет ни электронная рабочая тормозная система BBS, ни стояночная тормозная система ЕСРВ. Однако поскольку продута также питающая магистраль к прицепу (порт 21 модуля управления прицепом ТСМ 9), прицеп автоматически затормаживается за счет функции отрыва.
2. Электромагнитный 3/2-распределитель 39 (тестовый электромагнит) в модуле РВМ 3 стояночного тормоза ошибочным образом запитывается током, например из-за неисправности в ECPB-ECU 40:
- шина данных CAN J1939 сообщает о достаточном питающем давлении. В режиме самоконтроля ECPB-ECU 40 осуществляет контроль клапанов;
- ECB-ECU 24 не указывает на неисправность, поскольку неисправность находится в стояночном тормозном устройстве ЕСРВ, однако ECPB-ECU 40 сообщает о неисправности, например: «неисправность в электромагнитном 3/2-распределителе 39»;
- в качестве уровня перехода в аварийный режим ECPB-ECU 40 посылает команду на EBS-ECU 24 на электрическое управление давлением к прицепу.
3. Питающая магистраль (порт 1 на ТСМ 9) к модулю управления прицепом ТСМ 9 порвана или засорена:
- шина данных CAN J1939 сообщает о достаточном питающем давлении. ECPB-ECU 40 посылает команду на EBS-ECU 24 на электрическое управление давлением к прицепу. Если это не удается сделать, то EBS-ECU 24 через некоторое время обнаружит, что продувка управляющей магистрали (порт 22) к прицепу невозможна, и установит соответствующую неисправность;
- за счет ECPB-ECU 40 не происходит индикации неисправности, поскольку она лежит в рабочем тормозном устройстве EBS, причем EBS-ECU 24 сообщает: «неисправность в питающей линии (порт 1) к модулю управления прицепом ТСМ 9»;
- уровень перехода в аварийный режим отсутствует, поскольку ни рабочее тормозное устройство EBS, ни стояночное тормозное устройство ЕСРВ не имеют возможности вмешательства. Однако поскольку продута также питающая магистраль (порт 21) к прицепу, прицеп автоматически затормаживается за счет функции отрыва.
4. Электромагнитный 3/2-распределитель 39 (тестовый электромагнит) механически защемлен или магистраль к порту 43 модуля управления прицепом ТСМ 9 засорена:
- это обнаруживается, поскольку отсутствует какая-либо другая неисправность;
- за счет ECPB-ECU 40 не происходит индикации неисправности, например: «магистраль к порту 43 модуля управления прицепом ТСМ 9 засорена, или электромагнитный 3/2-распределитель 39 (тестовый электромагнит) имеет механический дефект». EBS-ECU 24 не сообщает от неисправности, поскольку она возникла в зоне стояночного тормозного устройства ЕСРВ;
- в качестве уровня перехода в аварийный режим ECPB-ECU 40 посылает на EBS-ECU 24 команду на электрическое управление давлением к прицепу.
Без запроса давления в прицепе на порте 22 модуля стояночного тормоза РВМ 3 или на порте 43 модуля 9 управления прицепом неисправность нельзя было бы обнаружить. За счет использования электрических, управляемых посредством EBS-ECU 24 исполнительных устройств можно после обнаружения неисправности лучше локализовать возможные причины, а при наличии определенных причин можно за счет EBS-ECU 24 активировать резервную функцию.
Датчики, обнаруживающие неисправность или сбой в электронной стояночной тормозной системе ЕСРВ в режиме самоконтроля, включают в себя датчик давления 36 и электромагнитные клапаны 34, 37-39 в модуле стояночного тормоза РВМ 3 для регулирования давления на порте 22 и для выполнения тестовой функции.
Относящиеся к электронной рабочей тормозной системе EBS датчики и исполнительные устройства, которые обнаруживают и/или локализуют ошибку или нарушение по меньшей мере одной функции электронной стояночной тормозной системы ЕСРВ и/или активируют аварийную программу электронной рабочей тормозной системы EBS для замены нарушенной функции электронной стояночной тормозной системы ЕСРВ, включают в себя датчик давления в модуле ТСМ 9 управления прицепом и электромагнитные клапаны в модуле ТСМ 9 управления прицепом для регулирования давления в качестве исполнительных устройств.
Перечень ссылочных позиций
1 - пневморесивер
2 - управляющая магистраль
3 - модуль РСМ стояночного тормоза
4 - электрические управляющие линии
5 - механизм ручного управления
6 - пневматическая управляющая магистраль
7 - пневматические управляющие магистрали
8 - магистрали подачи сжатого воздуха
9 - модуль управления прицепом ТСМ
10 - тормозной цилиндр с пружинным энергоаккумулятором
11 - пневморесивер
12 - пневморесивер
13 - магистраль подачи сжатого воздуха
13а - магистраль подачи сжатого воздуха
14 - модуль ножного тормоза
15 - пневматическая управляющая магистраль
16 - пневматическая управляющая магистраль
17 - магистраль подачи сжатого воздуха
18 - магистраль подачи сжатого воздуха
19 - модуль регулирования давления переднего моста
20 - напорные магистрали
21 - клапаны управления давлением
22 - рабочий тормозной цилиндр
23 - модуль регулирования давления
24 - блок управления (ECU) электронной тормозной системы (EBS)
25 - электрические управляющие линии
26 - электрические управляющие линии
27 - линии электропитания и CAN шина
28 - линии электропитания и CAN шина
29 - измерительный кабель
30 - датчики скорости вращения колес
31 - тормозные напорные магистрали
33 - CAN шины (Control Area Network)
34 - релейный клапан
36 - датчик давления
37 - бистабильный электромагнитный 3/2-распределитель
38 - электромагнитный 2/2-распределитель
39 - электромагнитный 3/2-распределитель (тестовый магнит)
40 - ECPB-ECU
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРООБОРУДОВАНИЕ АВТОМОБИЛЯ ИЛИ АВТОПОЕЗДА ИЗ ТЯГАЧА И, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПРИЦЕПА | 2018 |
|
RU2727630C1 |
| УЗЕЛ ВОЗДУХОПОДГОТОВКИ ДЛЯ ТОРМОЗНОГО УСТРОЙСТВА КОММЕРЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЭКСПЛУАТАЦИИ УСТРОЙСТВА ВОЗДУХОПОДГОТОВКИ | 2017 |
|
RU2717883C1 |
| Пневматическая система грузового высокоавтоматизированного электрического транспортного средства категории N3 | 2023 |
|
RU2811182C1 |
| БЛОК ПОДГОТОВКИ ВОЗДУХА ДЛЯ ТОРМОЗНОГО УСТРОЙСТВА ТРАНСПОРТНОГО СРЕДСТВА ХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ, ТОРМОЗНОЕ УСТРОЙСТВО И СПОСОБ ЭКСПЛУАТАЦИИ БЛОКА ПОДГОТОВКИ ВОЗДУХА | 2017 |
|
RU2730741C1 |
| КЛАПАННОЕ УСТРОЙСТВО ПАРКОВОЧНОГО ТОРМОЗА | 2018 |
|
RU2738507C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВОЧНЫМ ТОРМОЗОМ | 2014 |
|
RU2643853C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИ УПРАВЛЯЕМОЙ СТОЯНОЧНОЙ ТОРМОЗНОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2651962C2 |
| ТОРМОЗНОЙ ПРИВОД АВТОМОБИЛЯ | 2011 |
|
RU2495769C2 |
| БЛОК УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2544252C2 |
| Пневматический тормозной привод тягача | 1985 |
|
SU1344651A1 |
Изобретение относится к устройству контроля для контроля систем транспортного средства, из которых, по меньшей мере, некоторые системы содержат режим самоконтроля и/или некоторые из систем содержат режим внешнего контроля других систем, причем эти режимы внешнего контроля не предназначены для выполнения собственных функций или самоконтроля. При обнаружении в режиме самоконтроля первой системы (ЕСРВ) нарушения или ошибки по меньшей мере одной функции, выполняемой первой системой (ЕСРВ), вторая система (ESB) активируется первой системой (ЕСРВ), имеющей неисправность или сбой, или третьей системой, контролирующей первую систему (ЕСРВ) в режиме внешнего контроля, с тем, чтобы с помощью исполнительных устройств и/или датчиков, относящихся ко второй системе (ESB), обнаружить и/или локализовать нарушение или сбой по меньшей мере одной функции первой системы (ЕСРВ) и/или чтобы активировать аварийную программу второй системы (ESB) для замены нарушенной функции первой системы. Технический результат: создание усовершенствованного устройства контроля, обеспечивающего улучшенный контроль неисправностей и их более точную локализацию. 5 з.п. ф-лы, 3 ил.
1. Устройство контроля для контроля систем транспортного средства, из которых, по меньшей мере, некоторые системы содержат режим самоконтроля и/или некоторые из систем содержат режим внешнего контроля других систем, причем эти режимы не предназначены для выполнения собственных функций или самоконтроля, отличающееся тем, что при обнаружении в режиме самоконтроля первой системы (ЕСРВ) нарушения или ошибки по меньшей мере одной функции, выполняемой первой системой (ЕСРВ), вторая система (ESB) активируется первой системой (ЕСРВ), имеющей неисправность или сбой, или третьей системой, контролирующей первую систему (ЕСРВ) в режиме внешнего контроля, с тем, чтобы с помощью исполнительных устройств и/или датчиков, относящихся ко второй системе (ESB), обнаружить и/или локализовать нарушение или сбой по меньшей мере одной функции первой системы (ЕСРВ) и/или чтобы активировать аварийную программу второй системы (ESB) для замены нарушенной функции первой системы.
2. Устройство контроля по п. 1, отличающееся тем, что обнаружение ошибки или сбоя по меньшей мере одной функции первой системы (ЕСРВ) в режиме самоконтроля и/или внешнего контроля выполняется на основе вида сигналов, внесенных первой системой (ЕСРВ), и/или на основе отсутствия сигналов, внесенных первой системой (ЕСРВ).
3. Устройство контроля по п. 1 или 2, отличающееся тем, что первая система является электронной стояночной тормозной системой (ЕСРВ) тягача автопоезда, а вторая система является электронной рабочей тормозной системой (EBS).
4. Устройство контроля по п. 3, отличающееся тем, что датчики электронной рабочей тормозной системы (EBS) содержат по меньшей мере один датчик давления модуля (ТСМ, 9) управления прицепом, а исполнительные устройства, связанные с электронной рабочей тормозной системой (EBS), содержат электромагнитные клапаны модуля (ТСМ, 9) управления прицепом для регулирования давления.
5. Устройство контроля по п. 3, отличающееся тем, что датчики, выполненные с возможностью обнаружения неисправности или сбоя электронной стояночной тормозной системы (ЕСРВ) в режиме самоконтроля, содержат по меньшей мере один датчик давления (36) модуля (РВМ, 3) стояночного тормоза, а также электромагнитные клапаны (34, 37, 38) модуля (РВМ, 3) стояночного тормоза для регулирования давления.
6. Устройство контроля по п. 4, отличающееся тем, что датчики, выполненные с возможностью обнаружения неисправности или сбоя электронной стояночной тормозной системы (ЕСРВ) в режиме самоконтроля, содержат по меньшей мере один датчик давления (36) модуля (РВМ, 3) стояночного тормоза, а также электромагнитные клапаны (34, 37, 38) модуля (РВМ, 3) стояночного тормоза для регулирования давления.
| DE 19510522 A1, 26.09.1996 | |||
| УСТРОЙСТВО для УБОРКИ ЛИСТЬЕВ ТАБАКА! ВСЕСОЮЗНАЯ^!ДТ?§1111а-ГЕХШГ1ЕЯ»^ПЧВЛИОТЕКА | 0 |
|
SU357922A1 |
| DE 10200605570 A1, 29.05.2008 | |||
| DE 69402117 T2, 26.06.1997 | |||
| Электропневматическая тормозная система транспортного средства | 1979 |
|
SU854785A1 |

