Область техники
Изобретение относится к бортовому оборудованию, обеспечивающему индикацию, сигнализацию, навигацию, управление общевертолетным оборудованием, вертолетовождение, радиосвязь, взаимодействие в системе организации воздушного движения.
Уровень техники
Известен комплекс бортового оборудования летательного аппарата, содержащий комплексную систему электронной индикации и сигнализации, пилотажный комплекс вертолета, пилотажно-навигационную аппаратуру, информационный комплекс высотно-скоростных параметров, систему управления общевертолетным оборудованием, пульты управления общевертолетным оборудованием, пульты-вычислители навигационные, интегрированную систему резервных приборов, ответчик системы управления воздушным движением, защищенный бортовой регистратор, комплекс средств связи, генератор цифровых карт, метеонавигационную радиолокационную станцию, систему раннего предупреждения близости земли, бортовую систему диагностики вертолета, систему регулирования внутрикабинного освещения, комплект внутреннего светотехнического и светосигнального оборудования, аварийные спасательные радиомаяки, систему табло аварийной и уведомляющей сигнализации, основной канал информационного обмена, аудиоканал информационного обмена, причем система управления общевертолетным оборудованием содержит резервируемые независимые каналы приема, обработки и формирования информации, систему управления общевертолетным оборудованием, интегрированная систему резервных приборов, комплекс средств связи, генератор цифровых карт, метеонавигационную радиолокационную станцию, систему раннего предупреждения близости земли, бортовую систему диагностики вертолета, комплексную систему электронной индикации и сигнализации, пилотажный комплекс вертолета, пульты-вычислители навигационные, пилотажно-навигационную аппаратуру, аварийные спасательные радиомаяки, защищенный бортовой регистратор, ответчик системы управления воздушным движением, которые подключены к основному каналу информационного обмена, комплекс средств связи соединен с системой раннего предупреждения близости земли, пилотажно-навигационной аппаратурой, системой табло аварийной и уведомляющей сигнализации, системой управления общевертолетным оборудованием, защищенным бортовым регистратором, информационным комплексом высотно-скоростных параметров аудиоканалом информационного обмена, пульты-вычислители навигационные соединены между собой, система управления общевертолетным оборудованием соединена с комплексной системой электронной индикации и сигнализации и защищенным бортовым регистратором, система регулирования внутрикабинного освещения соединена с комплектом внутреннего светотехнического и светосигнального оборудования и с системой табло аварийной и уведомляющей сигнализации, а также подключена к основному каналу информационного обмена (см. патент RU 2520174, опубликован 20.06.2014 Бюл. № 17).
Известный комплекс обладает рядом существенных недостатков, а именно, не удовлетворяет требованиям к современным вертолетам по таким характеристикам, как повышение точности определения координат летательного аппарата, повышение надежности выполнения полетного задания (увеличение времени наработки на отказ), снижение массы пилотажно-навигационного оборудования, уменьшения времени предполетной проверки бортового оборудования.
Раскрытие изобретения
Целью настоящего изобретения является создание комплекса бортового оборудования летательного аппарата, в котором обеспечивается точность определения координат летательного аппарата, надежность выполнения полетного задания (увеличение времени наработки на отказ) при одновременном снижении массы пилотажно-навигационного оборудования и уменьшении времени предполетной проверки бортового оборудования.
Технический результат заключается в повышении точности определения координат летательного аппарата и одновременной надежности выполнения полетного задания.
Указанный технический результат достигается тем, что многофункциональный комплекс бортового оборудования вертолета, содержит совокупность соединённых соответствующими каналами передачи данных элементов таким образом, что передача и/или приём сигналов между этими элементами осуществляется через соответствующие входы/выходы, предусмотренные в указанных элементах для передачи и/или приёма информационно-электрических сигналов, кроме того схема соединения указанных элементов выполнена с возможностью взаимодействия данных элементов согласно соответствующему алгоритму приёма/передачи/распределения информационно-электрических сигналов, причём указанными элементами схемы являются такие элементы, как пульт-вычислитель навигационный с приемником спутниковой связи (1), система автоматического управления (2), система электронной индикации (3), навигационная система (4), включающая в себя устройство определения крена, тангажа и курсоуказатель, вычислитель воздушных сигналов (5), радиотехническое оборудование (6), включающее в себя автоматический радиокомпас, аппаратуру навигации и посадки, радиосвязное оборудование (7), радиовысотомер малых высот (8), защищенный бортовой накопитель (9), метеонавигационную радиолокационную систему (11), генератор цифровых карт (13) и группу резервных приборов (10), включающую в себя указатель приборной скорости, два авиагоризонта, спутниковую антенну (14), обеспечивающую передачу сигнала на соответствующий вход пульта-вычислителя навигационного (1) и соответствующий вход генератора цифровых карт (13), причём в приемник спутниковой связи пульта-вычислителя навигационного введена схема дифференциальной коррекции, вход которой соединён с первым выходом спутниковой антенны, а выход подключён к первому входу пульта-вычислителя навигационного, причём в вычислитель управления полетом системы автоматического управления введена схема резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, первый выход которой соединён с первым входом системы электронной индикации, второй выход – с четвертым входом системы автоматического управления, первый вход – с пятым выходом пульта-вычислителя навигационного, третий вход – с пятым выходом вычислителя воздушных сигналов, а четвертый вход – с выходом курсоуказателя навигационной системы.
В одном из вариантов выполнения заявленного изобретения в него введена бортовая информационная система контроля (12), включающая в себя основной и резервный индикаторы, блок вычисления и формирования сигналов с основной и резервной схемами измерений параметров общевертолетного оборудования, входы которых соединены с датчиками контроля параметров двигателя, трансмиссии, топливной системы, системы электроснабжения, гидросистемы, выход основной схемы измерений параметров общевертолетного оборудования соединён с входом основного индикатора, а выход резервной схемы – с входом резервного индикатора бортовой информационной системы контроля.
В другом из вариантов выполнения заявленного изобретения в блок вычисления и формирования сигналов бортовой информационной системы контроля введена схема преобразования сигналов систем комплекса бортового оборудования, с целью их соответствия стандарту ARINC 717, выход которой соединён с входом защищенного бортового накопителя, а вход с первыми выходами пульта-вычислителя навигационного, системы автоматического управления, системы электронной индикации, навигационной системы, вычислителя воздушных сигналов, радиотехнического оборудования, радиосвязного оборудования, радиовысотомера малых высот и группы резервных приборов.
В другом из вариантов выполнения заявленного изобретения в пульт-вычислитель навигационный введена схема формирования, сохранения и выдачи эксплуатационной информации об отказах систем комплекса в полете, выход которой соединён с первым входом индикатора пульта-вычислителя навигационного, а вход со вторыми выходами, пульта-вычислителя навигационного, системы автоматического управления, системы электронной индикации, навигационной системы, вычислителя воздушных сигналов, радиотехнического оборудования и радиовысотомера малых высот.
В другом из вариантов выполнения заявленного изобретения в генератор цифровых карт введён приемник спутниковой связи, вход которого соединён со вторым выходом спутниковой антенны, первый выход – со вторым входом схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенной в вычислителе управления полетом системы автоматического управления, а второй выход – со вторым входом системы электронной индикации.
В другом из вариантов выполнения заявленного изобретения в пульт-вычислитель навигационный введена схема коррекции координат вертолета по наземным ориентирам, выход которой соединён с третьим входом пульта-вычислителя навигационного, а вход – с выходом индикатора пульта-вычислителя навигационного.
В другом из вариантов выполнения заявленного изобретения в пульт-вычислитель навигационный введена схема установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки, вход которой соединён с шестым выходом пульта-вычислителя навигационного, а выход – с первым входом автоматического радиокомпаса, аппаратуры навигации и посадки, расположенных в радиотехническом оборудовании.
В другом из вариантов выполнения заявленного изобретения в систему электронной индикации введена схема установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки, вход которой соединён с седьмым выходом системы электронной индикации, а выход – со вторым входом автоматического радиокомпаса и аппаратуры навигации и посадки, расположенных в радиотехническом оборудовании.
В другом из вариантов выполнения заявленного изобретения в пульт - вычислитель навигационный введена схема выставки заданного путевого угла, вход которой соединён с четвертым выходом пульта-вычислителя навигационного, а выход – с первым входом системы автоматического управления.
В другом из вариантов выполнения заявленного изобретения в систему электронной индикации введена схема выставки заданного путевого угла, вход которой соединён с четвертым выходом системы электронной индикации, а выход – со вторым входом системы автоматического управления.
В другом из вариантов выполнения заявленного изобретения в систему электронной индикации введена схема выставки и формирования сигнала опасной высоты, первый вход которой соединён с пятым выходом системы электронной индикации, второй вход – с четвертым выходом радиовысотомера, первый выход – с входом радиосвязного оборудования, а второй выход – с четвертым входом системы электронной индикации.
В другом из вариантов выполнения заявленного изобретения в систему электронной индикации введена схема управления метеонавигационной радиолокационной системой, первый вход которой соединён с шестым выходом системы электронной индикации, второй вход и первый выход схемы соединены с выходом и входом метеонавигационной радиолокационной системы соответственно, а второй выход – с пятым входом системы электронной индикации.
В другом из вариантов выполнения заявленного изобретения вычислитель воздушных сигналов введена схема вычисления максимально допустимой приборной скорости вертолета, первый вход которой соединён с четвертым выходом вычислителя воздушных сигналов, второй вход – с выходом бортовой информационной системы контроля, а третий вход – с девятым выходом системы электронной индикации, первый выход – с третьим входом системы электронной индикации, а второй выход – с входом указателя приборной скорости из группы резервных приборов, в который введён индикатор максимально допустимой приборной скорости вертолета.
В другом из вариантов выполнения заявленного изобретения в систему электронной индикации введена схема определения достоверной информации о крене и тангаже вертолета, первый вход которой соединён с выходом устройства определения крена и тангажа вертолета в навигационной системе, а второй и третий
входы – с выходами первого и второго авиагоризонтов из группы резервных приборов соответственно, первый выход схемы соединён со вторым входом пульта-вычислителя навигационного, а второй выход – с третьим входом системы автоматического управления.
В другом из вариантов выполнения заявленного изобретения в пульт-вычислитель навигационный введена схема предполетной и расширенной проверки комплекса бортового оборудования, выход которой соединён со вторым входом индикатора пульта-вычислителя навигационного, первый вход – с третьими выходами пульта-вычислителя навигационного, системы автоматического управления, системы электронной индикации, навигационной системы, вычислителя воздушных сигналов, радиотехнического оборудования и радиовысотомера малых высот, а второй вход – с восьмым выходом системы электронной индикации.
Краткое описание чертежей
Фиг. 1. Блок-схема многофункционального комплекса бортового оборудования вертолетов, включающая схему соединений устройств, имеющих отличительные признаки изобретения.
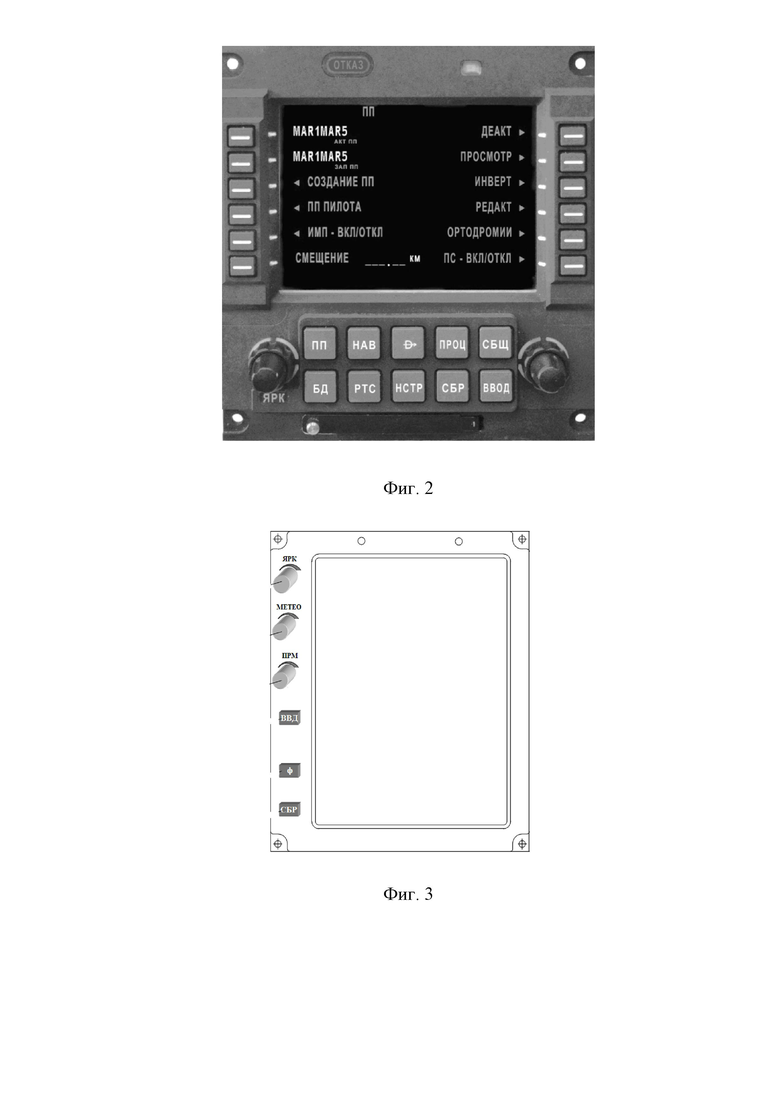
Фиг. 2. Лицевая панель пульта-вычислителя навигационного, основное назначение которого решение задач вертолетовождения в соответствии с требованиями зональной навигации в составе бортового оборудования.
Фиг. 3. Лицевая панель системы электронной индикации, основное назначение которой обеспечение пилота пилотажно-навигационной информацией.
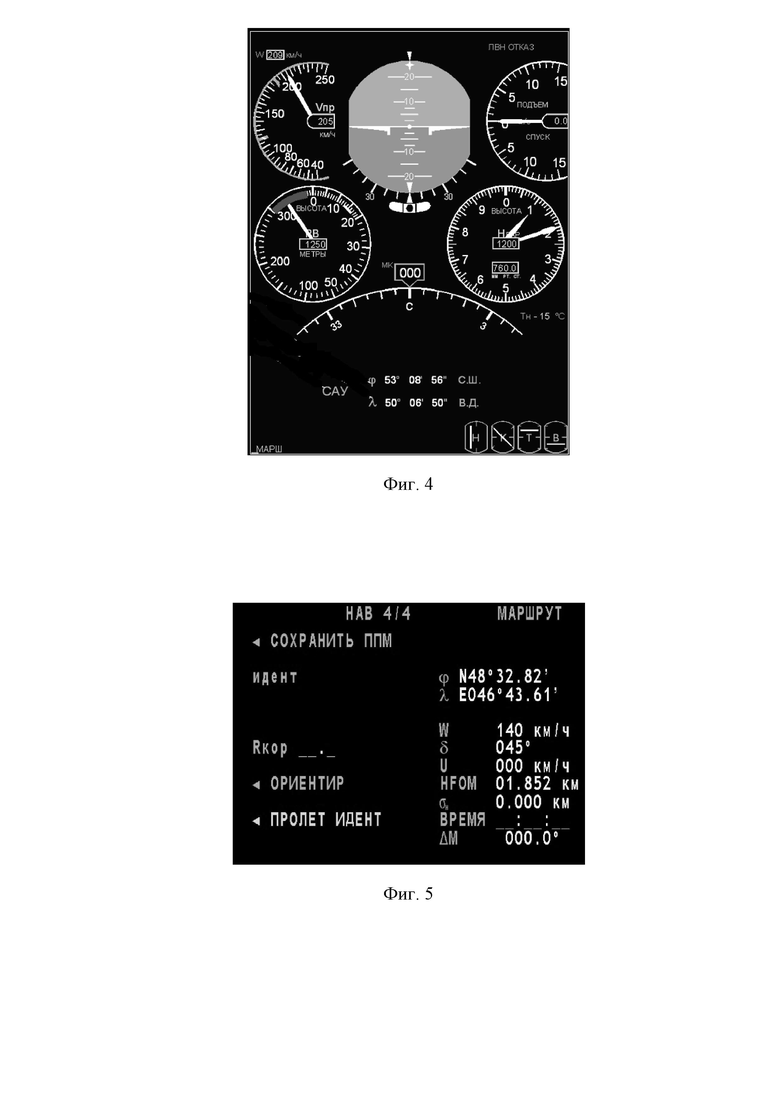
Фиг. 4. Один из информационных кадров системы электронной индикации, по которому пилот контролирует полет вертолета при отказе пульта-вычислителя навигационного.
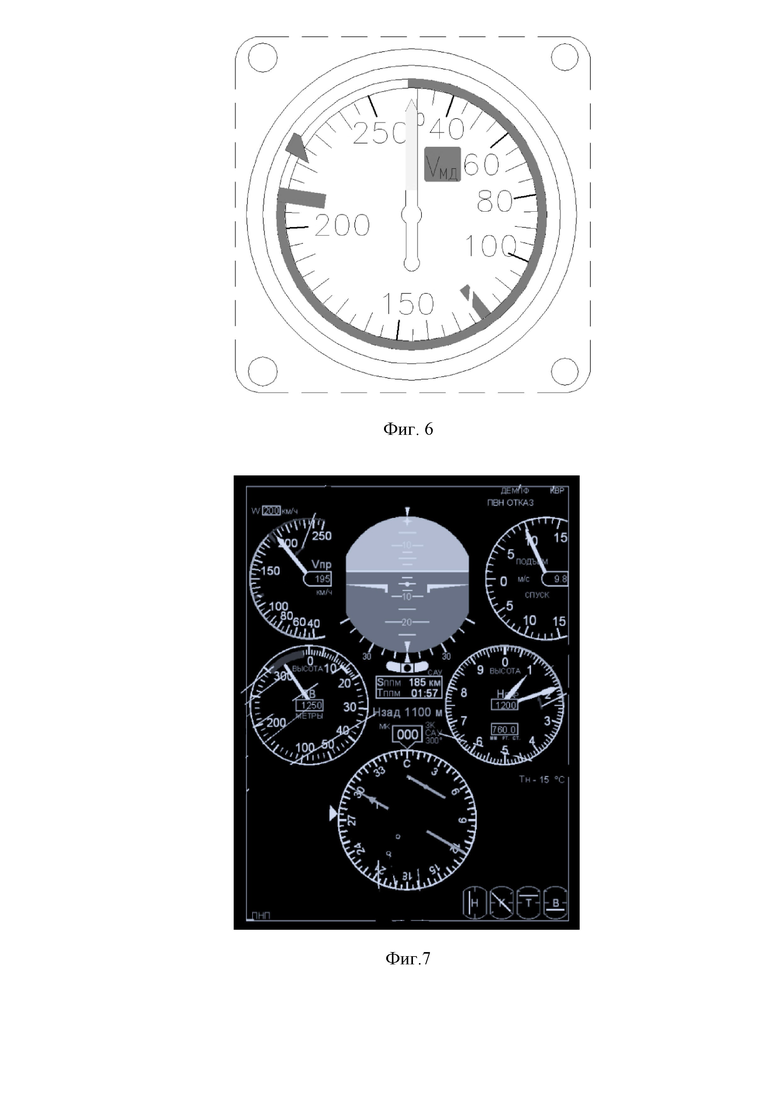
Фиг. 5. Навигационная страница (НАВ 4/4) индикатора пульта-вычислителя навигационного, на которой проводится коррекция координат вертолета по наземным ориентирам.
Фиг. 6. Лицевая панель резервного указателя приборной скорости с индикатором максимально допустимой приборной скорости. На шкале указателя индексом красного цвета показана граница максимально допустимой приборной скорости, которая меняется в зависимости от режима полета вертолета.
Фиг. 7. Страница системы электронной индикации, на указателе приборной скорости которой (стрелкой) показано указание пилоту снизить скорость вертолета. На шкале указателя приборной скорости красным цветом выделен диапазон скоростей, изменяющейся в зависимости от режима полета, при которых нагрузки на несущие винты превышают допустимую величину.
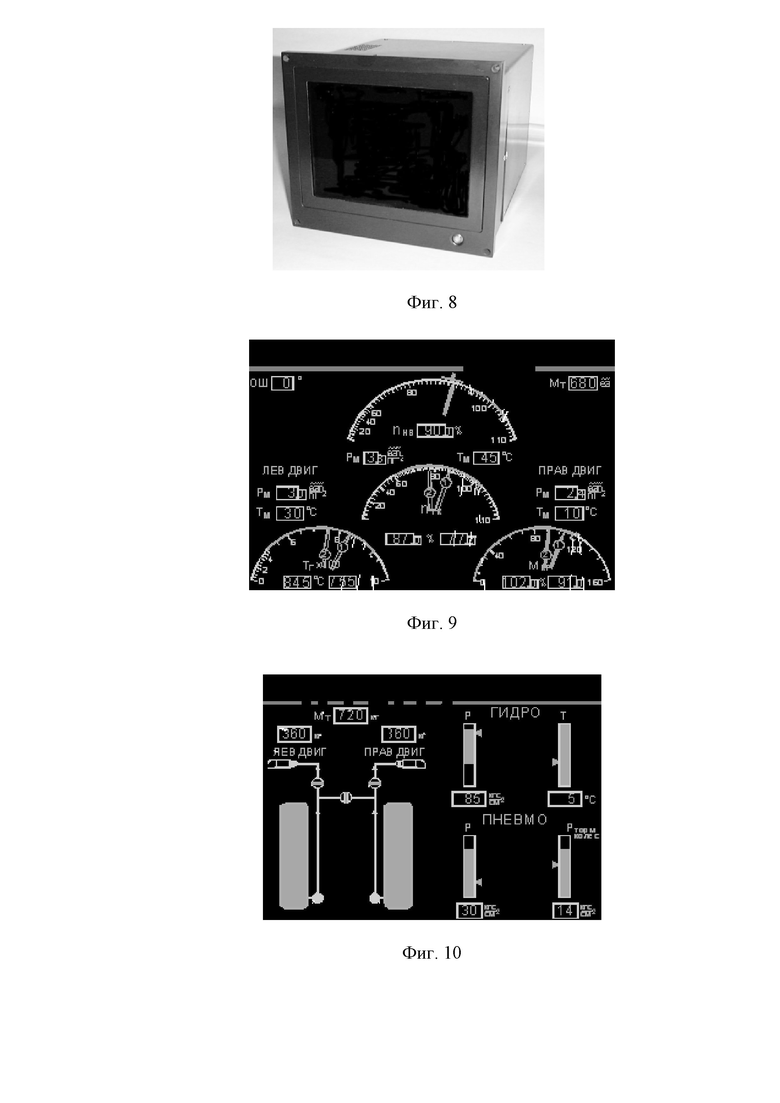
Фиг. 8. Внешний вид основного и резервного индикаторов бортовой информационной системы контроля, на который выводятся параметры общевертолетного оборудования и сообщения о нештатной работе оборудования. С помощью этого же индикатора в многофункциональный комплекс бортового оборудования вводятся дата вылета, номер рейса и другая информация.
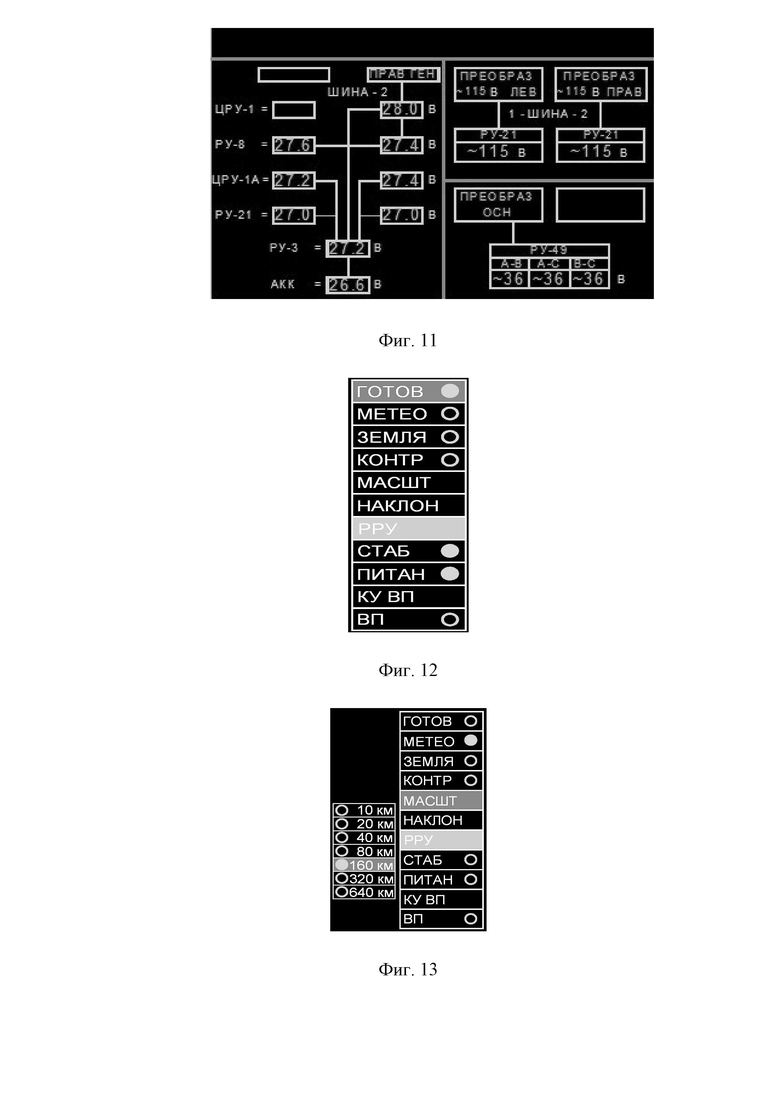
Фиг. 9. Информационный кадр индикатора бортовой информационной системы контроля с параметрами двигателя.
Фиг. 10. Информационный кадр индикатора бортовой информационной системы контроля с параметрами топливной системы, гидросистемы и пневмосистемы.
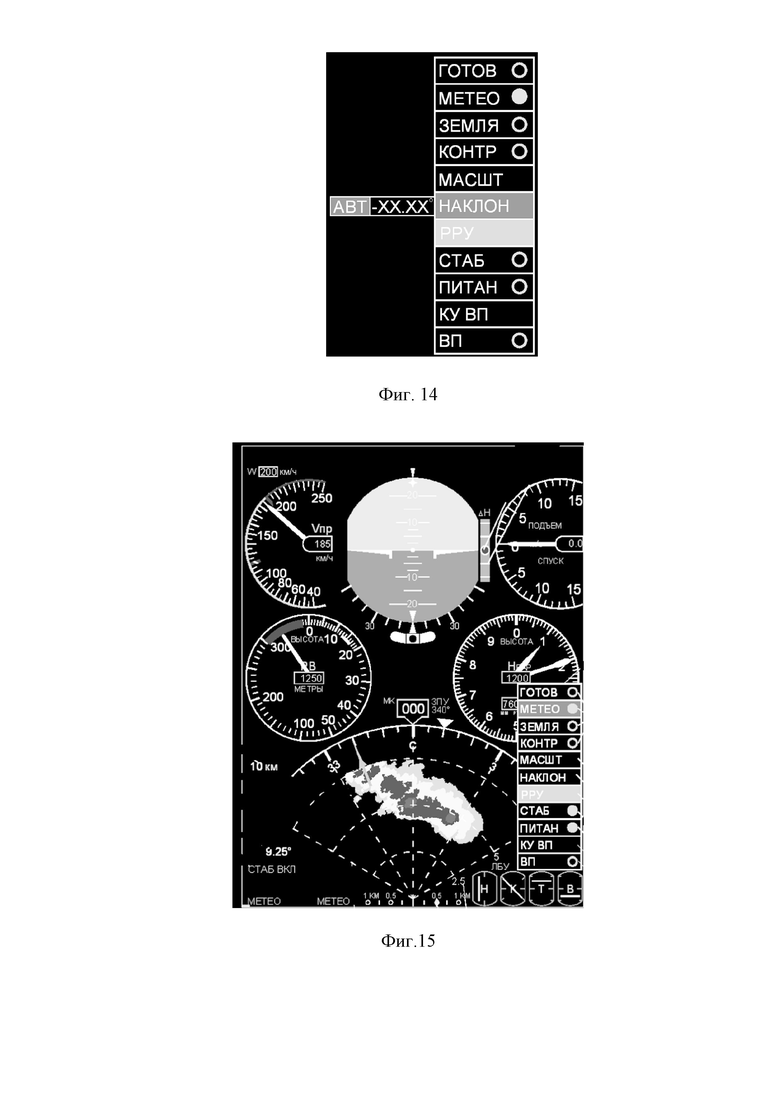
Фиг. 11. Информационный кадр индикатора бортовой информационной системы контроля с параметрами системы электроснабжения.
Фиг. 12. Окно выбора режимов работы метеонавигационной радиолокационной системы на экране системы электронной индикации. В этом окне можно выбрать различные режимы работы метеонавигационной радиолокационной системы.
Фиг. 13. Окно выбора масштабов метеонавигационной радиолокационной системы на экране системы электронной индикации. В этом окне проводится выбор масштаба изображения метеообстановки.
Фиг. 14. Окно установки угла наклона антенны метеонавигационной радиолокационной системы на экране системы электронной индикации. В этом окне проводится выставка угла наклона антенны.
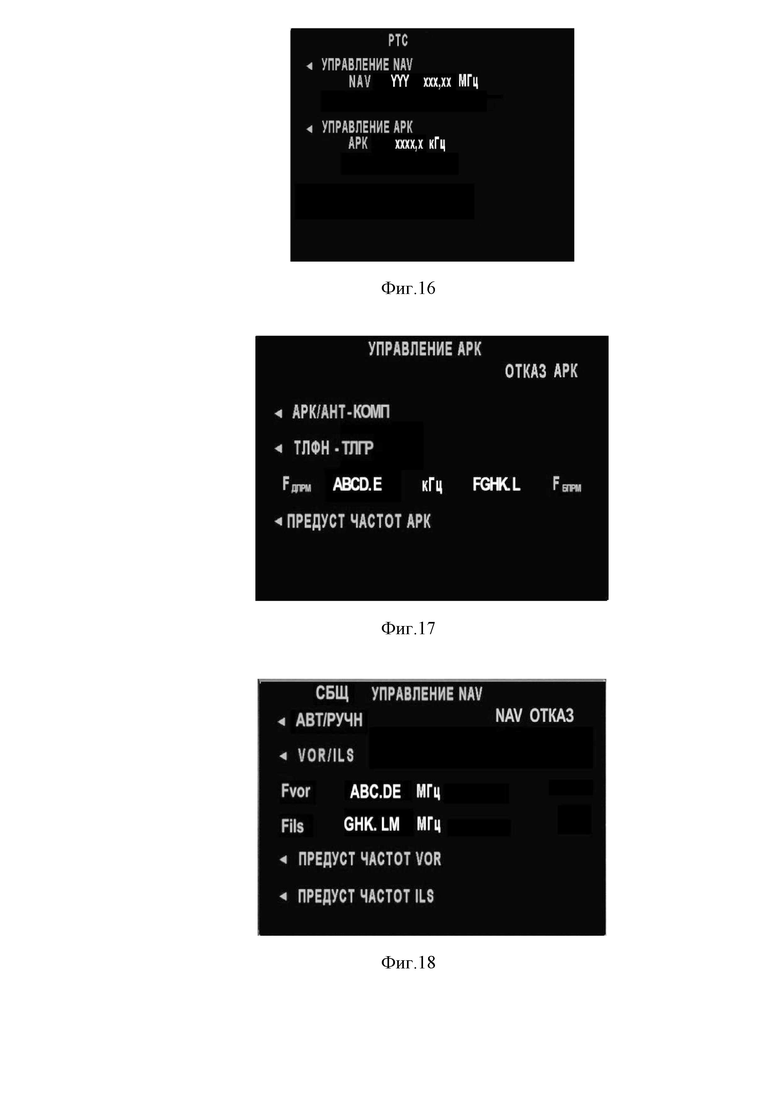
Фиг. 15. Информационный кадр системы электронной индикации с метеообстановкой и окном выбора режимов работы метеонавигационной радиолокационной системы.
Фиг. 16. Страница управления радиотехническими средствами пульта-вычислителя навигационного. На этой странице осуществляется выбор режимов работы автоматического радиокомпаса и аппаратуры навигации и посадки.
Фиг. 17. Страница «УПРАВЛЕНИЕ АРК» пульта-вычислителя навигационного, на которой осуществляется выбор частот маяков для автоматического радиокомпаса.
Фиг. 18. Страница «УПРАВЛЕНИЕ NAV» пульта-вычислителя навигационного, на которой осуществляется выбор частот маяков для аппаратуры навигации и посадки.
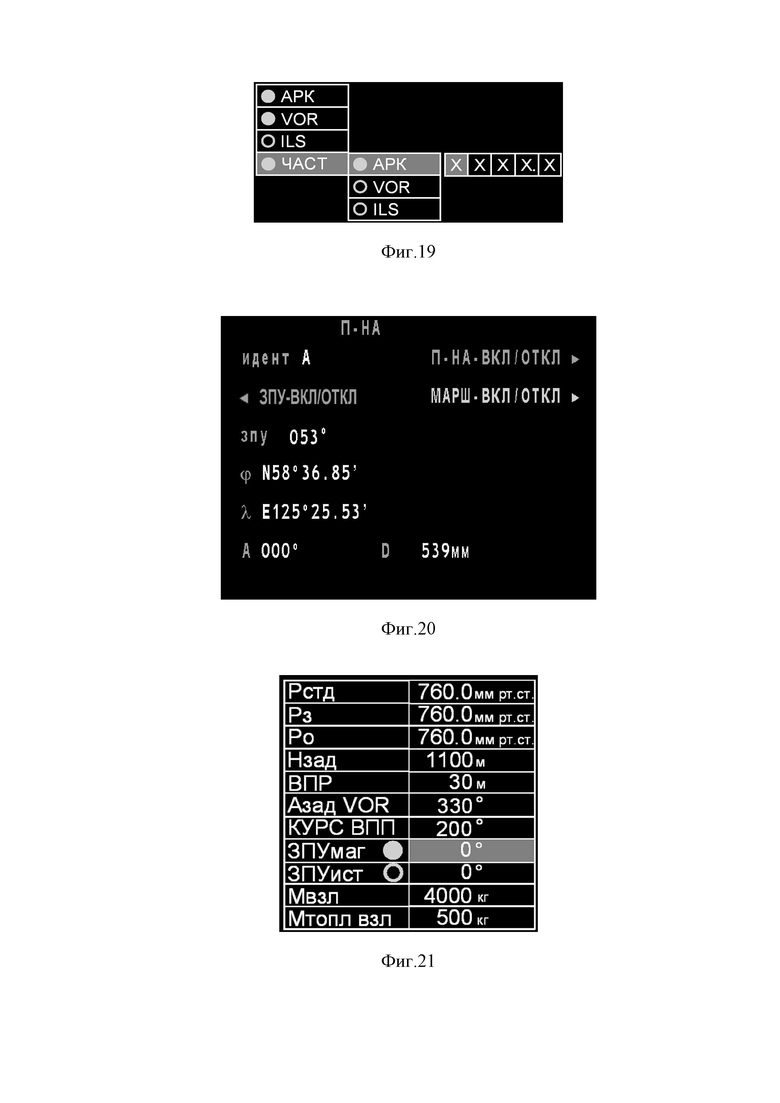
Фиг. 19. Окно на экране системы электронной индикации для выставки частот автоматического радиокомпаса, аппаратуры навигации и посадки.
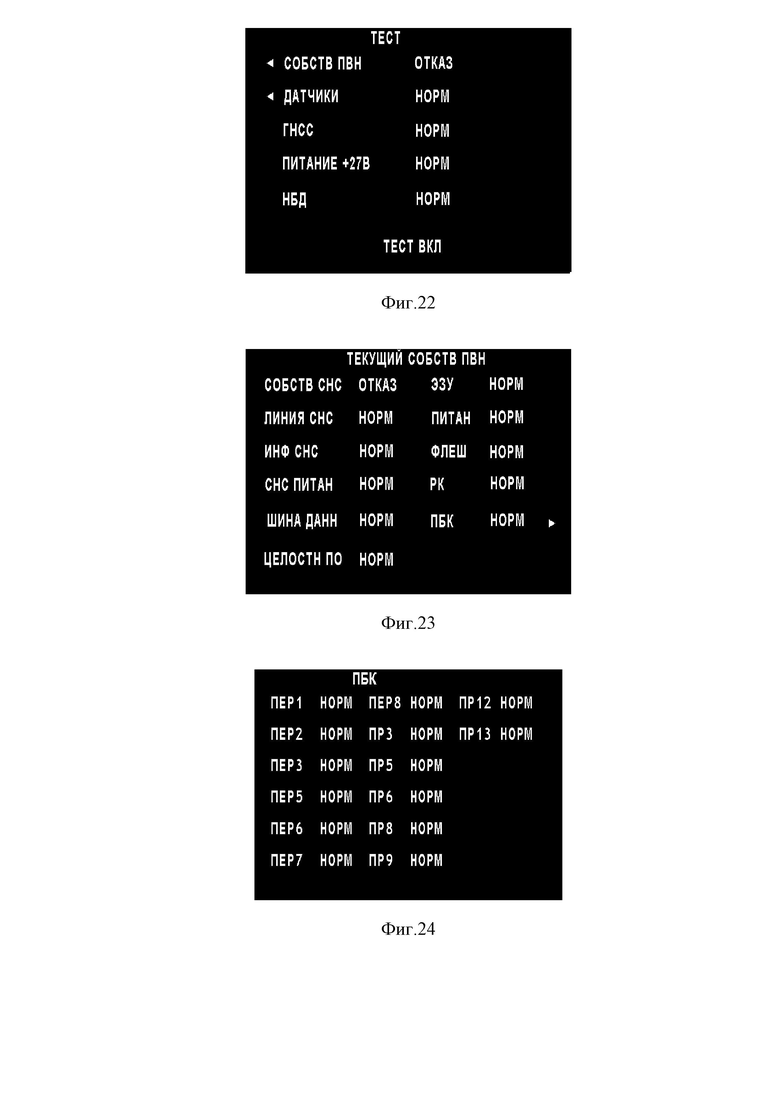
Фиг. 20. Страница «П-НА» пульта-вычислителя навигационного для введения заданного путевого угла. На этой странице можно выставить магнитный и истинный заданный путевой угол.
Фиг. 21. Окно ввода заданного путевого угла на экране системы электронной индикации. На этой странице можно выставить магнитный и истинный заданный путевой угол.
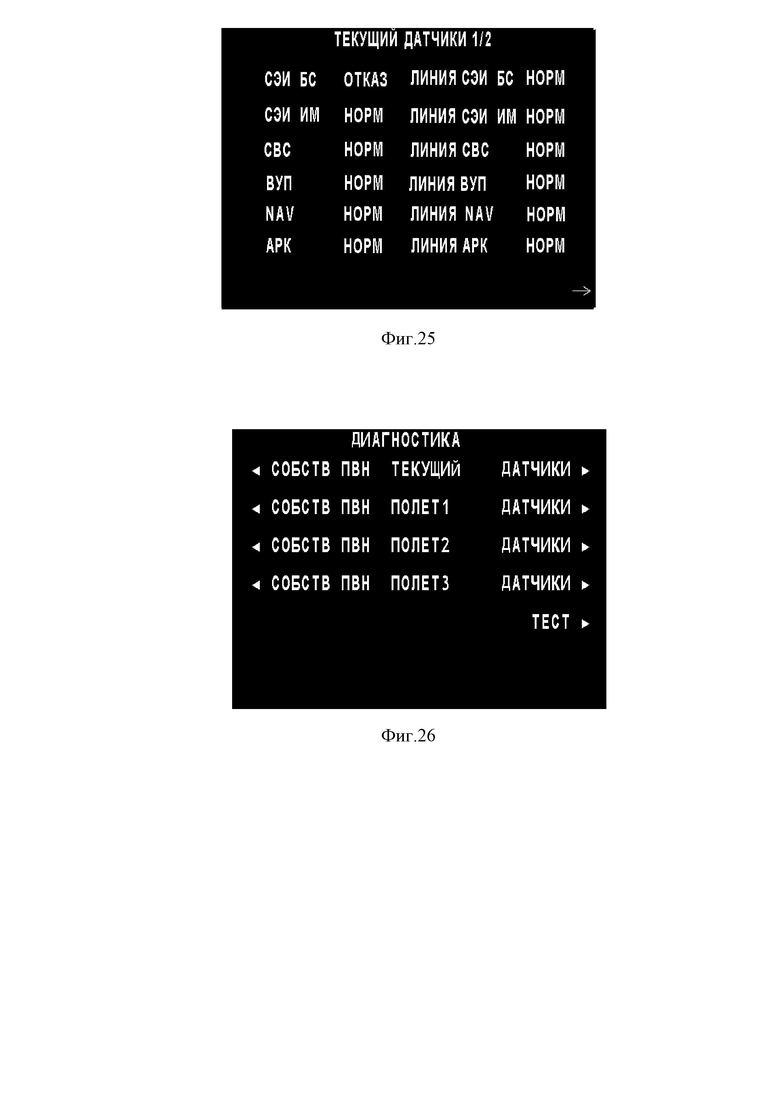
Фиг. 22. Страница «Тест» пульта-вычислителя навигационного с результатами проверки систем многофункционального комплекса. На этой странице проверяется бортовое оборудование многофункционального комплекса, линии связи, его электроснабжение.
Фиг. 23. Страница пульта-вычислителя навигационного с результатами проверки приемника спутниковой связи, линий последовательного биполярного кода.
Фиг. 24. Страница пульта-вычислителя навигационного для проверки линий последовательного биполярного кода.
Фиг. 25. Страница «ТЕКУЩИЕ ДАТЧИКИ» пульта-вычислителя навигационного, с результатами проверки систем многофункционального комплекса. Количество страниц для проверки оборудования многофункционального комплекса определяется количеством систем.
Фиг. 26. Страница «ДИАГНОСТИКА» пульта-вычислителя навигационного, на которой проверяется работоспособность систем многофункционального комплекса вертолета в трех последних полетах. На этой странице проводится проверка работы бортового оборудования многофункционального комплекса, линий связи, его электроснабжения в трех последних полетах путем нажатия соответствующих кнопок на пульте-вычислителе навигационном.
Осуществление изобретения
В комплекс бортового оборудования вертолета введены следующие схемы:
- схема дифференциальной коррекции;
- схема формирования, сохранения и выдачи эксплуатационной информации об отказах систем комплекса в полете;
- схема коррекции координат вертолета по наземным ориентирам;
- схема установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки;
- схема выставки заданного путевого угла;
- схема предполетной и расширенной проверки комплекса бортового оборудования;
- схема резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту;
- схема преобразования сигналов систем комплекса бортового оборудования, с целью их соответствия стандарту ARINC 717;
- приемник спутниковой связи;
- бортовая информационная система контроля;
- схема установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки;
- схема выставки заданного путевого угла;
- схема выставки и формирования сигнала опасной высоты;
- схема управления метеонавигационной радиолокационной системой;
- схема определения достоверной информации о крене и тангаже вертолета;
- схема вычисления максимально допустимой приборной скорости вертолета;
Согласно фиг. 2 лицевая панель пульта-вычислителя навигационного содержит следующие обозначения (надписи) и элементы:
- ЯРК (информирует о том, что большая рукоятка левого энкодера предназначена для регулировки яркости экрана);
– малая рукоятка левого энкодера;
– большая рукоятка левого энкодера (рукоятка ЯРК);
– жидкокристаллический экран;
– набор кнопок выбора строки L1 – L6;
– светодиодный индикатор отказного состояния;
– оптосенсор системы автоматической регулировки яркости;
– набор кнопок выбора строки R1 – R6;
– набор функциональных кнопок;
– большая рукоятка правого энкодера;
– малая рукоятка правого энкодера;
– крышка отсека для установки карт памяти
Согласно фиг. 3 лицевая панель системы электронной индикации содержит следующие обозначения (надписи) и элементы:
- Ручка «ЯРК» регулирует общую яркость изображения.
- Ручка «МЕТЕО» регулирует относительную яркость изображения метеоинформации.
- Кремальера «ПРМ» изменяет значения параметров, осуществляет перемещение курсора и вызов информационных окон.
- Кнопка «ВВД» осуществляет ввод выбранного формата и выставленного значения параметра.
- Кнопка «Ф» осуществляет вызов форматов изображения.
- Кнопка «СБР» осуществляет возврат к исходному состоянию в режиме ввода параметров или выбора форматов, а также снятие с индикации отказной информации.
Примеры изображений на экранах электронных устройств визуализации показаны на фиг. 4-26.
Для достижения технического результата, заключающегося в повышении точности вертолетовождения, уменьшении габаритно-весовых характеристик комплекса, увеличении времени наработки на отказ и уменьшении стоимости летного часа вертолета предложен многофункциональный комплекс бортового оборудования вертолета, содержащий следующие компоненты:
Пульт-вычислитель навигационный (ПВН), включающий в себя приемник спутниковой связи со схемой дифференциальной коррекции, схему установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки из состава радиотехнического оборудования, схему выставки заданного путевого угла, схему коррекции координат вертолета по наземным ориентирам, схему предполетной и расширенной проверки систем комплекса, а также схему формирования, сохранения и выдачи экспуатационной информации об отказах систем комплекса в полете.
Вход схемы дифференциальной коррекции соединен с первым выходом спутниковой антенны, а выход – с первым входом пульта-вычислителя навигационного.
Вход схемы установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки соединен с шестым выходом пульта-вычислителя навигационного, а выход – с первым входом автоматического радиокомпаса, аппаратуры навигации и посадки.
Вход схемы выставки заданного путевого угла соединен с четвертым выходом пульта вычислителя навигационного, а выход – с первым входом системы автоматического управления.
Вход схемы коррекции координат вертолета по наземным ориентирам соединен с выходом индикатора пульта-вычислителя навигационного, а выход – с третьим входом пульта-вычислителя навигационного.
Выход схемы предполетной и расширенной проверки систем комплекса соединен со вторым входом индикатора пульта-вычислителя навигационного, первый вход – с третьими выходами пульта-вычислителя навигационного, системы автоматического управления, навигационной системы, системы электронной индикации, вычислителя воздушных сигналов, радиотехнического оборудования и радиовысотомера малых высот, а второй вход с восьмым выходом системы электронной индикации.
Выход схемы формирования, сохранения и выдачи эксплуатационной информации об отказах систем комплекса соединен с первым входом индикатора пульта-вычислителя навигационного, а вход – со вторыми выходами пульта-вычислителя навигационного, системы автоматического управления, навигационной системы, системы электронной индикации, вычислителя воздушных сигналов, радиотехнического оборудования и радиовысотомера малых высот.
Первый вход пульта-вычислителя навигационного соединен с выходом схемы дифференциальной коррекции, расположенной в приемнике спутниковой связи пульта-вычислителя навигационного. Второй вход соединен с первым выходом схемы определения достоверной информации о крене и тангаже вертолета, расположенной в системе электронной индикации. Третий вход соединен с выходом схемы коррекции координат вертолета по наземным ориентирам, расположенной в пульте-вычислителе навигационном.
Первый выход пульта-вычислителя навигационного соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля. Второй выход соединен с входом схемы формирования, сохранения и выдачи эксплуатационной информации, расположенной в пульте-вычислителе навигационном. Третий выход соединен с первым входом схемы предполетной и расширенной проверки систем комплекса, расположенной в пульте-вычислителе навигационном. Четвертый выход соединен с входом схемы выставки заданного путевого угла, расположенной в пульте-вычислителе навигационном.
Пятый выход соединен с первым входом схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенной в вычислителе управления полетом системе автоматического управления. Шестой выход соединен с входом схемы установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки из состава радиотехнического оборудования, расположенной в пульте-вычислителе навигационном.
Комплекс также содержит систему автоматического управления (САУ), включающую в себя вычислитель управления полетом со схемой резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту.
Первый выход схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту соединен с первым входом системы электронной индикации, второй выход – с четвертым входом системы автоматического управления, первый вход – с пятым выходом пульта-вычислителя навигационного, второй вход – с первым выходом приемника спутниковой связи, расположенного в генераторе цифровых карт, третий вход – с пятым выходом вычислителя воздушных сигналов, а четвертый вход – с выходом курсоуказателя, расположенного в навигационной системе.
Первый вход системы автоматического управления соединен с выходом схемы выставки заданного путевого угла, расположенной в пульте-вычислителе навигационном. Второй вход соединен с выходом схемы заданного путевого угла, расположенной в системе электронной индикации. Третий вход соединен со вторым выходом схемы определения достоверной информации о крене и тангаже вертолета, расположенной в системе электронной индикации. Четвертый вход соединен со вторым выходом схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенной в вычислителе управления полетом системы автоматического управления.
Первый выход системы автоматического управления соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля, второй выход соединен с входом схемы формирования, сохранения и выдачи эксплуатационной информации, расположенной в пульте-вычислителе навигационном, третий выход – с первым входом схемы предполетной и расширенной проверки систем комплекса, расположенной в пульте-вычислителе навигационном.
Комплекс содержит систему электронной индикации (СЭИ), включающую в себя схему установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки из состава радиотехнического оборудования, схему выставки заданного путевого угла, схему выставки и формирования сигнала опасной высоты, схему управления метеонавигационной радиолокационной системой, схему определения достоверной информации о крене и тангаже вертолета.
Вход схемы установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки соединен с седьмым выходом системы электронной индикации, а выход – со вторым входом автоматического радиокомпаса, аппаратуры навигации и посадки из состава радиотехнического оборудования.
Вход схемы выставки заданного путевого угла соединен с четвертым выходом системы электронной индикации, а выход – со вторым входом системы автоматического управления.
Первый вход схемы выставки и формирования сигнала опасной высоты соединен с пятым выходом системы электронной индикации, второй вход – с четвертым выходом радиовысотомера, первый выход – с входом радиосвязного оборудования, а второй выход с четвертым входом системы электронной индикации.
Первый вход схемы управления метеонавигационной радиолокационной системой соединен с шестым выходом системы электронной индикации, второй вход и первый выход схемы соединены с выходом и входом метеонавигационной радиолокационной системы соответственно, а второй выход – с пятым входом системы электронной индикации.
Первый вход схемы определения достоверной информации о крене и тангаже вертолета соединен с выходом устройства определения крена и тангажа вертолета, расположенного в навигационной системе, второй и третий входы – с выходами первого и второго авиагоризонтов из группы резервных приборов соответственно, первый выход схемы соединен со вторым входом пульта-вычислителя навигационного, а второй выход – с третьим входом системы автоматического управления.
Первый вход системы электронной индикации соединен с первым выходом схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенной в вычислителе управления полетом системы автоматического управления. Второй вход соединен со вторым выходом приемника спутниковой связи, расположенного в генераторе цифровых карт.
Третий вход соединен с первым выходом схемы вычисления максимально допустимой приборной скорости вертолета, расположенной в вычислителе воздушных сигналов. Четвертый вход соединен со вторым выходом схемы выставки и формирования опасной высоты, расположенной в системе электронной индикации. Пятый вход соединен со вторым выходом схемы управления метеонавигационной радиолокационной системой, расположенной в системе электронной индикации.
Первый выход системы электронной индикации соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля. Второй выход соединен с входом схемы формирования, сохранения и выдачи эксплуатационной информации, расположенной в пульте-вычислителе навигационном. Третий выход соединен с первым входом схемы предполетной и расширенной проверки комплекса, расположенной в пульте-вычислителе навигационном. Четвертый выход соединен с входом схемы выставки заданного путевого угла, расположенной в системе электронной индикации. Пятый выход соединен с первым входом схемы выставки и формирования сигнала опасной высоты, расположенной в системе электронной индикации. Шестой выход соединен с первым входом схемы управления метеонавигационной радиолокационной системой, расположенной в системе электронной индикации. Седьмой выход соединен с входом схемы установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки, расположенной в системе электронной индикации. Восьмой выход соединен со вторым входом схемы предполетной и расширенной проверки систем комплекса, расположенной в пульте-вычислителе навигационном. Девятый выход соединен с третьим входом схемы вычисления максимально допустимой приборной скорости, расположенной в вычислителе воздушных сигналов.
Комплекс содержит навигационную систему (НС), включающую в себя устройство определения крена и тангажа вертолета, а также курсоуказатель.
Выход устройства определения крена и тангажа вертолета соединен с первым входом схемы определения достоверной информации о крене и тангаже, расположенной в системе электронной индикации.
Выход курсоуказателя соединен с четвертым входом схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенной в вычислителе управления полетом системы автоматического управления.
Первый выход навигационной системы соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля. Второй выход соединен с входом схемы формирования, сохранения и выдачи эксплуатационной информации, расположенной в пульте-вычислителе навигационном. Третий выход соединен с первым входом схемы предполетной и расширенной проверки систем комплекса, расположенной в пульте-вычислителе навигационном.
Комплекс содержит вычислитель воздушных сигналов (ВВС), включающий в себя схему вычисления максимально допустимой приборной скорости вертолета.
Первый вход схемы вычисления максимально допустимой приборной скорости вертолета соединен с четвертым выходом вычислителя воздушных сигналов, второй вход – с выходом бортовой информационной системы контроля, а третий вход – с девятым выходом системы электронной индикации. Первый выход соединен с третьим входом системы электронной индикации, а второй выход – с входом указателя приборной скорости из группы резервных приборов.
Первый выход вычислителя воздушных сигналов соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля. Второй выход соединен с входом схемы формирования, сохранения и выдачи эксплуатационной информации, расположенной в пульте-вычислителе навигационном. Третий выход соединен с первым входом схемы предполетной и расширенной проверки комплекса, расположенной в пульте-вычислителе навигационном. Четвертый выход соединен с первым входом схемы вычисления максимально допустимой приборной скорости, расположенной в вычислителе воздушных сигналов. Пятый выход соединен с третьим входом схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенной в вычислителе управления полетом системы автоматического управления.
Комплекс содержит радиотехническое оборудование (РТО), включающее в себя автоматический радиокомпас, аппаратуру навигации и посадки в виде одного прибора.
Первый вход автоматического радиокомпаса, аппаратуры навигации и посадки соединен с выходом схемы установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки, расположенной в пульте-вычислителе навигационном, а второй вход – с выходом схемы установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки, расположенной в системе электронной индикации.
Первый выход радиотехнического оборудования соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля. Второй выход соединен с входом схемы формирования, сохранения и выдачи эксплуатационной информации, расположенной в пульте-вычислителе навигационном. Третий выход соединен с первым входом схемы предполетной и расширенной проверки систем комплекса, расположенной в пульте-вычислителе навигационном.
Комплекс содержит радиосвязное оборудование (РСО), первый выход которого соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля, а вход – с первым выходом схемы выставки и формирования сигнала опасной высоты, расположенной в системе электронной индикации.
Комплекс содержит радиовысотомер малых высот (РВ), первый выход которого соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля. Второй выход соединен с входом схемы формирования, сохранения и выдачи эксплуатационной информации, расположенной в пульте-вычислителе навигационном. Третий выход соединен с первым входом схемы предполетной и расширенной проверки систем комплекса, расположенной в пульте-вычислителе навигационном. Четвертый выход соединен со вторым входом схемы выставки и формирования сигнала опасной высоты, расположенной в системе электронной индикации.
Комплекс содержит бортовую информационную систему контроля (БИСК), включающую в себя основной и резервный индикаторы, блок вычисления и формирования сигналов с основой и резервной схемами измерения параметров общевертолетного оборудования, а также схемой преобразования сигналов с целью их соответствия стандарту ARINC 717.
Входы основной и резервной схем измерений параметров общевертолетного оборудования соединены с датчиками контроля параметров двигателя, трансмиссии, топливной системы, системы электроснабжения и гидросистемы, выход основной схемы измерений параметров общевертолетного оборудования соединен с входом основного индикатора, а выход резервной схемы – с входом резервного индикатора бортовой информационной системы контроля.
Выход схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717) соединен с входом защищенного бортового накопителя, а вход схемы соединен с первыми выходами пульта-вычислителя навигационного, системы автоматического управления, системы электронной индикации, навигационной системы, вычислителя воздушных сигналов, радиотехнического оборудования, радиосвязного оборудования, радиовысотомера малых высот и группы резервных приборов.
Выход бортовой информационной системы контроля соединен со вторым входом схемы вычисления максимально допустимой приборной скорости, расположенной в вычислителе воздушных сигналов.
Комплекс содержит защищенный бортовой накопитель (ЗБН) (9).
Вход защищенного бортового накопителя соединен с выходом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля.
Комплекс содержит метеонавигационную радиолокационную систему (МНРЛС).
Вход метеонавигационной радиолокационной системы соединен с первым выходом схемы управления метеонавигационной радиолокационной системой, расположенной в системе электронной индикации, а выход – со вторым входом этой схемы.
Комплекс содержит генератор цифровых карт (ГЦК), включающий в себя приемник спутниковой связи.
Вход приемника спутниковой связи соединен со вторым выходом спутниковой антенны, первый выход – со вторым входом схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенной в вычислителе управления полетом системы автоматического управления, а второй выход – со вторым входом системы электронной индикации.
Комплекс содержит группу резервных приборов (ГРП), включающих в себя указатель приборной скорости с индикатором максимально допустимой приборной скорости вертолета, два авиагоризонта.
Вход указателя приборной скорости соединен со вторым выходом схемы вычисления максимально допустимой приборной скорости, расположенной в вычислителе воздушных сигналов.
Выходы первого и второго авиагоризонтов соединены со вторым и третьим входами схемы определения достоверной информации о крене и тангаже вертолета, расположенной в системе электронной индикации.
Первый выход группы резервных приборов соединен с входом схемы преобразования сигналов (с целью их соответствия стандарту ARINC 717), расположенной в блоке вычисления и формирования сигналов бортовой информационной системы контроля.
Комплекс содержит спутниковую антенну.
Первый выход спутниковой антенны соединен с входом схемы дифференциальной коррекции, расположенной в приемнике спутниковой связи пульта-вычислителя навигационного. Второй выход соединен с входом приемника спутниковой связи, расположенного в генераторе цифровых карт.
Пульт-вычислитель навигационный осуществляет известным способом непрерывное счисление текущих координат вертолета в инерциальном или курсовоздушном режиме. Приемник спутниковой связи, расположенный в пульте-вычислителе навигационном осуществляет коррекцию результатов счисления для решения задачи вертолетовождения в соответствии с требованиями зональной навигации. С целью повышения точности определения координат вертолета в приемник спутниковой связи установлена схема дифференциальной коррекции. Спутниковые системы дифференциальной коррекции состоят из нескольких наземных станций, координаты которых известны с высокой точностью. С помощью спутниковых систем связи они определяют свои координаты и вычисляют разницу между измеренными координатами и своими известными координатами. Вычисленная разница передается на спутники. Спутники эту разницу в своих сигналах посылают потребителям. Схема дифференциальной коррекции, расположенная в приемнике спутниковой связи пульта-вычислителя навигационного, получая от спутников информацию о разнице координат, вводят поправки в вычисленные координаты вертолета. Использование схемы дифференциальной коррекции позволяет увеличить точность определения координат вертолета на порядок.
Однако при отказе пульта-вычислителя навигационного, в котором расположен приемник спутниковой связи, исключается возможность определения координат вертолета и продолжения полета по запланированному маршруту в автоматическом режиме. В предлагаемом многофункциональном комплексе эта проблема решается установкой в вычислителе управления полетом системы автоматического управления схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту. С пульта-вычислителя навигационного на эту схему подаются сигналы о плане полета и его отказе. При получении сигнала отказа с пульта-вычислителя навигационного схема известным способом по сигналам от вычислителя воздушных сигналов, курсоуказателя навигационной системы и по информации о плане полета вычисляет текущие координаты местоположения вертолета в курсовоздушном режиме и параметры управления полетом по маршруту.
Вычисленные значения из схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту передаются в систему электронной индикации и в систему автоматического управления.
Используя указанную информацию, система автоматического управления, при отказе пульта-вычислителя навигационного, обеспечивает продолжение полета по запланированному маршруту в автоматическом режиме, а пилот по изображению на экране системы электронной индикации контролирует параметры полета.
Однако без спутниковой коррекции погрешность счисления координат вертолета в курсовоздушном режиме возрастает, поэтому в предлагаемом многофункциональном комплексе для повышения точности вертолетовождения при отказе пульта-вычислителя навигационного в генератор цифровых карт устанавливается второй приемник спутниковой связи. Выходной сигнал второго приемника спутниковой связи подается в схему резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенную в вычислителе управления полетом системы автоматического управления. Он используется для коррекции известным способом вычисленных координат вертолета в резервном режиме.
Приемники спутниковой связи, установленные в пульте-вычислителе навигационном и в генераторе цифровых карт, при отсутствии сигналов спутников прекращают свою работу, что ухудшает точность счисления координат вертолета.
Для повышения точности определения координат вертолета при пропадании спутниковых сигналов в пульт-вычислитель навигационный предлагаемого многофункционального комплекса введена схема коррекции координат вертолета по наземным ориентирам. Для её функционирования в пульт-вычислитель навигационный перед вылетом вводятся координаты навигационных точек, расположенных по маршруту. При отсутствии спутниковых сигналов, пролетая вблизи этих навигационных точек, пилот может провести коррекцию координат вертолета нажатием кнопки напротив надписи «ПРОЛЕТ ИДЕНТ» на странице НАВ 4/4 индикатора пульта-вычислителя навигационного (Фиг. 5), предварительно введя вместо надписи «ОРИЕНТИР» название навигационной точки, выбранной для коррекции. Сигнал с индикатора при нажатии кнопки поступает в пульт-вычислитель навигационный и вычисленные в нём координаты вертолета заменяются координатами ориентира.
При пилотировании вертолетов очень важно не превысить максимально допустимую приборную скорость, при которой на несущие винты вертолета действуют чрезмерные нагрузки. Значение максимально допустимой скорости зависит от массы вертолета, частоты вращения несущих винтов, барометрической высоты и температуры наружного воздуха. С целью информирования летчика о превышении максимально допустимой скорости в вычислителе воздушных сигналов предлагаемого многофункционального комплекса введена схема вычисления максимально допустимой приборной скорости. На вход этой схемы поступают сигналы от бортовой информационной системы контроля (о частоте вращения несущих винтов и текущей массе топлива), от системы электронной индикации (о взлетной массе вертолета), а от вычислителя воздушных сигналов поступают сигналы о приборной скорости, температуре наружного воздуха и барометрической высоте вертолета. Рассчитанная максимально допустимая скорость в виде выходного сигнала из схемы подается на указатель приборной скорости в системе электронной индикации и на резервный указатель приборной скорости (Фиг. 6) из группы резервных приборов. На шкалах указателей скорости индексом красного цвета индицируется величина максимально допустимой приборной скорости, которая меняется в зависимости от режимов полета вертолета. При достижении максимально допустимой приборной скорости на указателях приборной скорости стрелки заходят в красные зоны шкал, при этом на указателе приборной скорости системы электронной индикации (Рис. 7) появляется стрелка красного цвета, указывающая пилоту о необходимости снизить приборную скорость.
При полетах по приборам на летательном аппарате должно быть три независимых устройства для измерения крена и тангажа. Это требование прописано в Части 29 Авиационных правил «Нормы летной годности винтокрылых аппаратов транспортной категории». Пилотирование вертолета по отказавшему устройству может привести к катастрофическим последствиям. Для исключения указанной ситуации в системе электронной индикации предлагаемого многофункционального комплекса установлена схема определения достоверной информации о крене и тангаже вертолета. Определение проводится на основе сравнения углов крена и тангажа, измеренных двумя авиагоризонтами из группы резервных приборов и устройством определения углов крена и тангажа, расположенным в навигационной системе. При значительной разнице измерений углов крена или тангажа одного из устройств относительно двух других проводится отключение его сигналов, а достоверные сигналы о крене и тангаже от исправных устройств передаются в пульт - вычислитель навигационный и систему автоматического управления. Это позволяет исключить использование отказавшего устройства в пилотажно-навигационных режимах.
В процессе полета вертолета важной задачей пилота является контроль функционирования общевертолетного оборудования: двигателя, трансмиссии, топливной системы, системы электроснабжения и гидросистемы. Некоторые параметры общевертолетного оборудования (в частности, частота вращения несущих винтов, масса топлива) используются в пилотажных режимах вертолета. Для контроля функционирования двигателя, трансмиссии, топливной системы, системы электроснабжения и гидросистемы в многофункциональный комплекс бортового оборудования вертолета введена бортовая информационная система контроля. Она включает в себя основной и резервный индикаторы, а также блок вычисления и формирования сигналов с основной и резервной схемами измерений параметров общевертолетного оборудования. На вход этих схем поступают сигналы с датчиков контроля двигателя, трансмиссии, топливной системы, системы электроснабжения и гидросистемы, при этом выходные сигналы основной схемы измерений параметров общевертолетного оборудования подаются на вход основного индикатора, а выходные сигналы резервной схемы измерений подаются на вход резервного индикатора бортовой информационной системы контроля.
Надежность датчиков контроля общевертолетного оборудования значительно выше, чем бортовой информационной системы контроля, поэтому указанное дублирование повышает надежность измерений параметров общевертолетного оборудования и надежность работы многофункционального комплекса в пилотажно-навигационных режимах.
Некоторые информационные кадры с параметрами общевертолетного оборудования на индикаторах бортовой информационной системы контроля показаны на Фиг. 9, фиг. 10 и фиг. 11.
Одним из путей снижения габаритно-весовых характеристик комплекса является использование пилотажно-навигационного оборудования вертолета без пультов управления. В предлагаемом многофункциональном комплексе исключены: пульт выставки заданного путевого угла, пульт управления автоматического радиомаяка, аппаратуры навигации и посадки, пульты метеонавигационной радиолокационной системы и пульт радиовысотомера.
Схема управления метеонавигационной радиолокационной системой, расположенная в системе электронной индикации, позволяет реализовать как функции метеолокатора, так и функции навигационного ориентирования по характерным наземным объектам. Для этого на экран системы электронной индикации вызываются специальные окна, в которых можно активировать режимы работы метеонавигационной радиолокационной системы, выбрать масштаб изображения, выбрать угол наклона антенны и реализовать другие функции (Фиг. 12, 13, 14).
После активации режимов управляющие сигналы из системы электронной индикации подаются в схему управления метеонавигационной радиолокационной системой, которые после преобразования подаются в одноименную систему и обеспечивают её работу. Выходные сигналы метеонавигационной радиолокационной системы поступают на схему её управления и, после преобразования, подаются в систему электронной индикации для формирования на её экране метеообстановки или земной поверхности (Фиг. 15).
Установленная в системе электронной индикации схема выставки и формирования опасной высоты позволяет исключить пульт управления радиовысотомера в предлагаемом многофункциональном комплексе. С помощью ручек управления в системе электронной индикации выставляется опасная высота, которая подается в схему выставки и формирования опасной высоты. При этом с радиовысотомера в эту же схему подается сигнал истинной высоты вертолета. Схема выставки и формирования опасной высоты системы электронной индикации при достижении опасной высоты формирует звуковой сигнал, который передается в радиосвязное оборудование и поступает в гарнитуру пилота. Одновременно схема выставки и формирования опасной высоты посылает сигнал в систему электронной индикации для формирования на её экране индикации истинной высоты (Фиг . 7) и проверки исправности радиовысотомера.
Установленная в пульте-вычислителе навигационном схема установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки позволяет исключить пульт управления этих систем.
Режим работы автоматического радиокомпаса, аппаратуры навигации и посадки выбирается на странице РТС пульта-вычислителя навигационного (Фиг. 16).
Нажатием кнопки напротив надписи «УПРАВЛЕНИЕ АРК» открывается страница «УПРАВЛЕНИЕ АРК» (Фиг. 17). На ней выбираются частоты маяков для автоматического радиокомпаса. Сигналы о выбранных частотах подаются в схему выбора режимов работы автоматического радиокомпаса и аппаратуры навигации и посадки, расположенную в пульте-вычислителе навигационном и, после преобразования, подаются в одноименную систему радиотехнического оборудования, обеспечивая работу автоматического радиокомпаса.
Нажатием кнопки напротив надписи «УПРАВЛЕНИЕ NAV» открывается страница «УПРАВЛЕНИЕ NAV» (Фиг. 18). На ней выбираются частоты маяков для системы навигации и посадки. Сигналы о выбранных частотах подаются в схему выбора режимов работы автоматического радиокомпаса и аппаратуры навигации и посадки, расположенную в пульте-вычислителе навигационном и, после преобразования, подаются в одноименную систему радиотехнического оборудования, обеспечивая работу аппаратуры навигации и посадки.
С целью повышения надежности аналогичная схема установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки установлена в системе электронной индикации.
С помощью ручек управления на экран системы электронной индикации выводятся окна, в которых устанавливаются частоты автоматического радиокомпаса и аппаратуры навигации и посадки (Фиг. 19).
Установленные частоты подаются в схему установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки, расположенную в системе электронной индикации и после преобразования подаются в одноименную систему радиотехнического оборудования, обеспечивая работу автоматического радиокомпаса, аппаратуры навигации и посадки в выбранных режимах.
Исключение пульта для выставки заданного путевого угла в предлагаемом устройстве достигается установкой схемы выставки заданного путевого угла в пульте-вычислителе навигационном.
На странице «П-НА» (Фиг. 20) пульта-вычислителя навигационного с помощью ручек управления выставляется заданный истинный или магнитный путевой угол, который в виде сигнала поступает в схему выставки заданного путевого угла, расположенную в пульте-вычислителе навигационном. После преобразования этот сигнал подается в систему автоматического управления для полета вертолета с заданным путевым углом.
С целью повышения надежности выполнения этого режима в системе электронной индикации установлена аналогичная схема выставки заданного путевого угла. С помощью ручек управления системы электронной индикации выставляется магнитный или истинный заданный путевой угол (Фиг. 21), который в виде сигнала подается в схему выставки заданного путевого угла, расположенную в системе электронной индикации. После преобразования этот сигнал подается в систему автоматического управления для полета вертолета с заданным путевым углом.
Из-за большого количества проводов, необходимых для связи систем многофункционального комплекса, возникает задача уменьшения их массы. Указанная проблема усложняется необходимостью регистрировать большое количество параметров многофункционального комплекса для оценки работоспособности оборудования при аварии вертолета. Информационное взаимодействие с защищенным бортовым накопителем требует специального преобразователя для соответствия регистрируемых сигналов требованиям ARINC 717.
С целью уменьшения массы проводов, указанная схема преобразования сигналов систем многофункционального комплекса была установлена в блоке вычисления и формирования сигналов бортовой информационной системы контроля. На вход этой схемы подаются сигналы от бортового оборудования, входящего в многофункциональный комплекс, а выходной сигнал схемы для записи подается в защищенный бортовой накопитель.
Уменьшение массы проводов, соединяющих системы бортового оборудования, достигается в предложенном многофункциональном комплексе также путем информационного взаимодействия его систем по кодовым линиям связи.
Время предполетной проверки бортового оборудования существенно влияет на стоимость летного часа вертолета. Для его уменьшения в пульт-вычислитель навигационный 1 введена схема предполетной и расширенной проверки бортового оборудования, входящего в предлагаемый многофункциональный комплекс. Система осуществляет оценку достоверности поступающей кодовой информации по следующим параметрам:
−наличию информации на входе системы;
−матрице состояния 32-разрядных слов;
−биту четности;
−допустимой минимальной паузе между 32-разрядными словами.
Проверка достоверности производится по каждому параметру, поступающему в указанную схему от бортового оборудования, входящего в многофункциональный комплекс.
При достоверности параметра схема предполетной и расширенной проверки формирует на индикаторе пульта-вычислителя навигационного надпись «НОРМА», при недостоверности параметра формирует надпись «ОТКАЗ».
Включение схемы предполетной и расширенной проверки бортового оборудования многофункционального комплекса, расположенной в пульте-вычислителе навигационном, осуществляется подачей сигнала с системы электронной индикации. При этом открывается страница пульта-вычислителя «ТЕСТ» (Фиг. 22). На странице «ТЕСТ» проверяются и пульт-навигационный, и взаимодействующее оборудование, и линии связи.
Путем нажатия кнопки напротив надписи «СОБСТ ПВН» проверяются работоспособность самого пульта-вычислителя навигационного, приемника спутниковой связи, электроснабжение систем комплекса, линий последовательного биполярного кода (Фиг. 23). В частности, нажатием кнопки напротив надписи «ПБК» открывается страница «ПБК» пульта-вычислителя навигационного с проверкой линий последовательного биполярного кода многофункционального комплекса (Фиг. 24).
Путем нажатия кнопки напротив надписи «ДАТЧИКИ» на странице «ТЕСТ» (Фиг.22) проверяются системы многофункционального комплекса. Одна из страниц проверки оборудования представлена на Фиг. 25.
Схема проверки многофункционального комплекса, расположенная в пульте-вычислителе навигационном, значительно сокращает время проверки комплекса и уменьшает стоимость летного часа.
Сокращение времени обслуживания вертолета достигается в предлагаемом комплексе также путем размещения в пульте-вычислителе навигационном схемы формирования, сохранения и выдачи эксплуатационной информации. Эта схема выполняет диагностику работы многофункционального комплекса бортового оборудования в процессе трех последних полетов вертолета. На вход её поступают сигналы от бортового оборудования многофункционального комплекса, а выходные сигналы схемы поступают на индикатор пульта-вычислителя навигационного. На странице «ДИАГНОСТИКА» (Фиг. 26) после завершения полетов определяется работоспособность систем комплекса в трех последних полетах. Путем нажатия кнопок на пульте-вычислителе навигационном открываются страницы проверки систем многофункционального комплекса, линий связи, системы электроснабжения. Оперативное определение отказавших систем комплекса позволяет провести их быструю замену, что снижает стоимость летного часа вертолета.
Технический результат, заключающийся в повышении точности, надежности, уменьшении габаритно-весовых характеристик многофункционального комплекса, в увеличении времени наработки на отказ и снижении стоимости летного часа достигается путем высокой степени интеграции блоков и функций комплекса, а также наличия развитых встроенных средств контроля и диагностики состояния входящего в него оборудования.
Введение в пульт-вычислитель навигационный схемы дифференциальных поправок позволяет повысить точность вертолетовождения, реализовать режимы точного захода на посадку и висения.
Введение в вычислитель управления полетом системы автоматического управления САУ схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту позволяет осуществлять автоматическое траекторное управление вертолетом при отказе пульта – вычислителя навигационного, что значительно повышает надежность многофункционального комплекса при траекторном управлении вертолета.
Введение в блок вычисления и формирования сигналов бортовой информационной системы резервной схемы измерения параметров общевертолетного оборудования и введение резервного многофункционального индикатора позволяет значительно повысить надежность определения параметров общевертолетного оборудования и повысить надежность выполнения пилотажно-навигационных режимов.
Введение в блок вычисления и формирования сигналов бортовой информационной системы схемы преобразования сигналов систем многофункционального комплекса (с целью их соответствия стандарту ARINC 717) позволяет уменьшить массу соединительных проводов и упростить его монтажную схему.
Введение в пульт-вычислитель навигационный схемы формирования, сохранения и выдачи эксплуатационной информации позволяет сократить время на поиск, локализацию отказавшего оборудования и уменьшить стоимость летного часа вертолета.
Введение в генератор цифровых карт второго преемника спутниковой навигационной системы обеспечивает высокую точность счисления координат вертолета при отказе пульта – вычислителя навигационного.
Введение в пульт-вычислитель навигационный схемы коррекции координат вертолета по наземным ориентирам позволяет повысить точность счисления текущих координат вертолета при отказах спутниковых навигационных систем.
Введение в пульт - вычислитель навигационный схемы установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки позволяет уменьшить габариты и массу многофункционального комплекса за счет исключения пульта управления автоматического радиокомпаса и аппаратуры навигации и посадки.
Введение в многофункциональный индикатор системы электронной индикации схемы установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки позволяет увеличить надежность работы радиотехнического оборудования.
Введение в пульт - вычислитель навигационный схемы выставки заданного путевого угла (ЗПУ) позволяет уменьшить габариты и массу многофункционального комплекса за счет исключения пульта выставки ЗПУ.
Введение в многофункциональный индикатор системы электронной индикации схемы выставки заданного путевого угла позволяет повысить надежность траекторного управления вертолетом.
Введение в многофункциональный индикатор системы электронной индикации схемы выставки и формирования сигнала опасной высоты позволяет уменьшить массу многофункционального комплекса за счет исключения указателя радиовысотомера.
Введение в многофункциональный индикатор системы электронной индикации схемы управления метеонавигационной радиолокационной системой позволяет значительно уменьшить массу многофункционального комплекса за счет исключения пульта управления метеонавигационной радиолокационной системой.
Введение в вычислитель воздушных сигналов схемы вычисления максимально допустимой приборной скорости вертолета, а в указатель приборной скорости из состава группы резервных приборов ГРП индикатора максимально допустимой приборной скорости позволяет повысить надежность многофункционального комплекса.
Введение в многофункциональный индикатор системы электронной индикации схемы определения достоверной информации о крене и тангаже вертолета позволяет повысить надежность многофункционального комплекса.
Введение в пульт-вычислитель навигационный схемы предполетной и расширенной проверки многофункционального комплекса позволяет сократить время предполетной подготовки вертолета и снизить стоимость летного часа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| Комплекс бортового радиоэлектронного оборудования вертолета | 2021 |
|
RU2771577C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| ИНТЕГРИРОВАННЫЙ БОРТОВОЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ВЕРТОЛЕТА | 2002 |
|
RU2204504C1 |
| КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2215668C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| МНОГОПОЗИЦИОННЫЙ ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА С ПОВЫШЕННЫМИ МАНЕВРЕННЫМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2252900C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
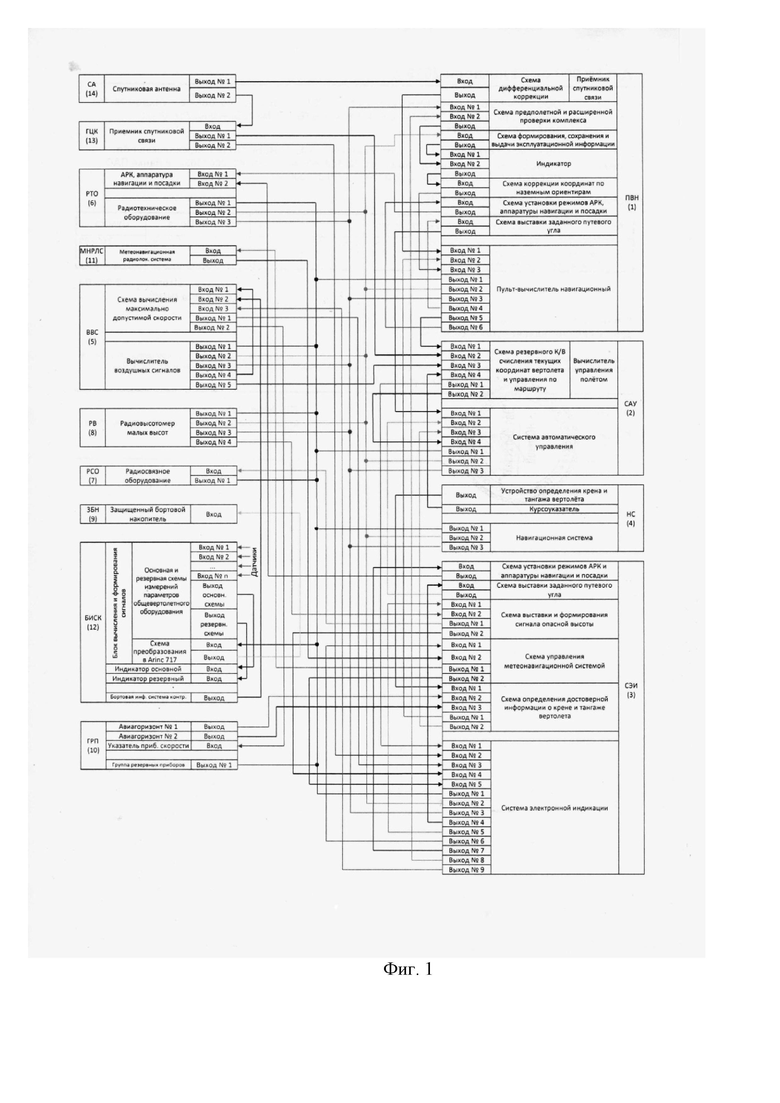
Многофункциональный комплекс бортового оборудования вертолета содержит пульт-вычислитель навигационный с приемником спутниковой связи (1), систему автоматического управления (2), систему электронной индикации (3), навигационную систему (4), включающую в себя устройство определения крена, тангажа и курсоуказатель, вычислитель воздушных сигналов (5), радиотехническое оборудование (6), включающее в себя автоматический радиокомпас, аппаратуру навигации и посадки, радиосвязное оборудование (7), радиовысотомер малых высот (8), защищенный бортовой накопитель (9), метеонавигационную радиолокационную систему (11), генератор цифровых карт (13) и группу резервных приборов (10), включающую в себя указатель приборной скорости, два авиагоризонта, спутниковую антенну (14), обеспечивающую передачу сигнала на соответствующий вход пульта-вычислителя навигационного (1) и соответствующий вход генератора цифровых карт (13). В приемник спутниковой связи пульта-вычислителя навигационного введена схема дифференциальной коррекции. В вычислитель управления полетом системы автоматического управления введена схема резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту. Технический результат заключается в повышении точности определения координат летательного аппарата и одновременной надежности выполнения полетного задания. 14 з.п. ф-лы, 26 ил.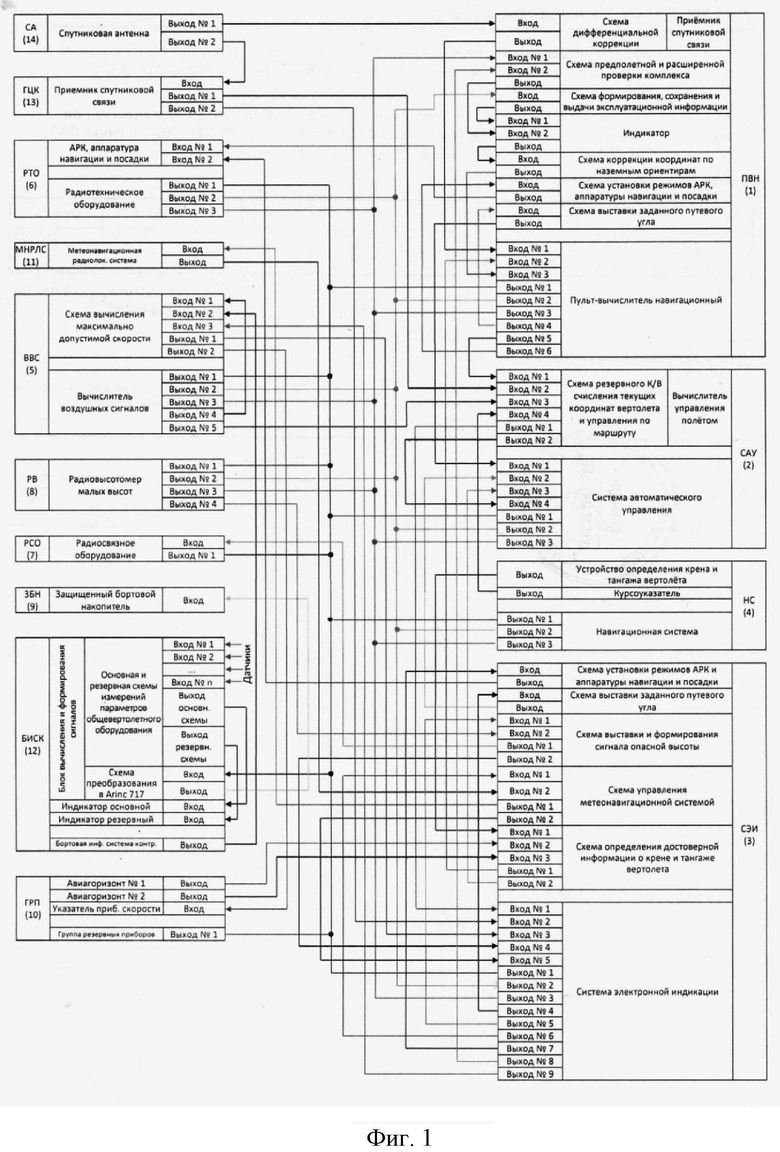
1. Многофункциональный комплекс бортового оборудования вертолета, содержащий совокупность соединённых соответствующими каналами передачи данных элементов таким образом, что передача и/или приём сигналов между этими элементами осуществляется через соответствующие входы/выходы, предусмотренные в указанных элементах для передачи и/или приёма информационно-электрических сигналов, кроме того, схема соединения указанных элементов выполнена с возможностью взаимодействия данных элементов согласно соответствующему алгоритму приёма/передачи/распределения информационно-электрических сигналов, причём указанными элементами схемы являются такие элементы, как пульт-вычислитель навигационный с приемником спутниковой связи (1), система автоматического управления (2), система электронной индикации (3), навигационная система (4), включающая в себя устройство определения крена, тангажа и курсоуказатель, вычислитель воздушных сигналов (5), радиотехническое оборудование (6), включающее в себя автоматический радиокомпас, аппаратуру навигации и посадки, радиосвязное оборудование (7), радиовысотомер малых высот (8), защищенный бортовой накопитель (9), метеонавигационную радиолокационную систему (11), генератор цифровых карт (13) и группу резервных приборов (10), включающую в себя указатель приборной скорости, два авиагоризонта, спутниковую антенну (14), обеспечивающую передачу сигнала на соответствующий вход пульта-вычислителя навигационного (1) и соответствующий вход генератора цифровых карт (13), отличающийся тем, что в приемник спутниковой связи пульта-вычислителя навигационного введена схема дифференциальной коррекции, вход которой соединён с первым выходом спутниковой антенны, а выход подключён к первому входу пульта-вычислителя навигационного, причём в вычислитель управления полетом системы автоматического управления введена схема резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, первый выход которой соединён с первым входом системы электронной индикации, второй выход – с четвертым входом системы автоматического управления, первый вход – с пятым выходом пульта-вычислителя навигационного, третий вход – с пятым выходом вычислителя воздушных сигналов, а четвертый вход – с выходом курсоуказателя навигационной системы.
2. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в него введена бортовая информационная система контроля (12), включающая в себя основной и резервный индикаторы, блок вычисления и формирования сигналов с основной и резервной схемами измерений параметров общевертолетного оборудования, входы которых соединены с датчиками контроля параметров двигателя, трансмиссии, топливной системы, системы электроснабжения, гидросистемы, выход основной схемы измерений параметров общевертолетного оборудования соединён с входом основного индикатора, а выход резервной схемы – с входом резервного индикатора бортовой информационной системы контроля.
3. Многофункциональный комплекс бортового оборудования вертолета по п.2, отличающийся тем, что в блок вычисления и формирования сигналов бортовой информационной системы контроля введена схема преобразования сигналов систем комплекса бортового оборудования, с целью их соответствия стандарту ARINC 717, выход которой соединён с входом защищенного бортового накопителя, а вход - с первыми выходами пульта-вычислителя навигационного, системы автоматического управления, системы электронной индикации, навигационной системы, вычислителя воздушных сигналов, радиотехнического оборудования, радиосвязного оборудования, радиовысотомера малых высот и группы резервных приборов.
4. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в пульт-вычислитель навигационный введена схема формирования, сохранения и выдачи эксплуатационной информации об отказах систем комплекса в полете, выход которой соединён с первым входом индикатора пульта-вычислителя навигационного, а вход - со вторыми выходами, пульта-вычислителя навигационного, системы автоматического управления, системы электронной индикации, навигационной системы, вычислителя воздушных сигналов, радиотехнического оборудования и радиовысотомера малых высот.
5. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в генератор цифровых карт введён приемник спутниковой связи, вход которого соединён со вторым выходом спутниковой антенны, первый выход – со вторым входом схемы резервного курсовоздушного счисления текущих координат местоположения вертолета и автоматического управления полетом по маршруту, расположенной в вычислителе управления полетом системы автоматического управления, а второй выход – со вторым входом системы электронной индикации.
6. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в пульт-вычислитель навигационный введена схема коррекции координат вертолета по наземным ориентирам, выход которой соединён с третьим входом пульта-вычислителя навигационного, а вход – с выходом индикатора пульта-вычислителя навигационного.
7. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в пульт-вычислитель навигационный введена схема установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки, вход которой соединён с шестым выходом пульта-вычислителя навигационного, а выход – с первым входом автоматического радиокомпаса, аппаратуры навигации и посадки, расположенных в радиотехническом оборудовании.
8. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в систему электронной индикации введена схема установки режимов работы автоматического радиокомпаса, аппаратуры навигации и посадки, вход которой соединён с седьмым выходом системы электронной индикации, а выход – со вторым входом автоматического радиокомпаса и аппаратуры навигации и посадки, расположенных в радиотехническом оборудовании.
9. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в пульт-вычислитель навигационный введена схема выставки заданного путевого угла, вход которой соединён с четвертым выходом пульта-вычислителя навигационного, а выход – с первым входом системы автоматического управления.
10. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в систему электронной индикации введена схема выставки заданного путевого угла, вход которой соединён с четвертым выходом системы электронной индикации, а выход – со вторым входом системы автоматического управления.
11. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в систему электронной индикации введена схема выставки и формирования сигнала опасной высоты, первый вход которой соединён с пятым выходом системы электронной индикации, второй вход – с четвертым выходом радиовысотомера, первый выход – с входом радиосвязного оборудования, а второй выход – с четвертым входом системы электронной индикации.
12. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в систему электронной индикации введена схема управления метеонавигационной радиолокационной системой, первый вход которой соединён с шестым выходом системы электронной индикации, второй вход и первый выход схемы соединены с выходом и входом метеонавигационной радиолокационной системы соответственно, а второй выход – с пятым входом системы электронной индикации.
13. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в вычислитель воздушных сигналов введена схема вычисления максимально допустимой приборной скорости вертолета, первый вход которой соединён с четвертым выходом вычислителя воздушных сигналов, второй вход – с выходом бортовой информационной системы контроля, а третий вход – с девятым выходом системы электронной индикации, первый выход – с третьим входом системы электронной индикации, а второй выход – с входом указателя приборной скорости из группы резервных приборов, в который введён индикатор максимально допустимой приборной скорости вертолета.
14. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в систему электронной индикации введена схема определения достоверной информации о крене и тангаже вертолета, первый вход которой соединён с выходом устройства определения крена и тангажа вертолета в навигационной системе, а второй и третий входы – с выходами первого и второго авиагоризонтов из группы резервных приборов соответственно, первый выход схемы соединён со вторым входом пульта-вычислителя навигационного, а второй выход – с третьим входом системы автоматического управления.
15. Многофункциональный комплекс бортового оборудования вертолета по п.1, отличающийся тем, что в пульт-вычислитель навигационный введена схема предполетной и расширенной проверки комплекса бортового оборудования, выход которой соединён со вторым входом индикатора пульта-вычислителя навигационного, первый вход – с третьими выходами пульта-вычислителя навигационного, системы автоматического управления, системы электронной индикации, навигационной системы, вычислителя воздушных сигналов, радиотехнического оборудования и радиовысотомера малых высот, а второй вход – с восьмым выходом системы электронной индикации.
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| СУДОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2478187C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| US 20153048420 A1, 03.12.2015 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |

