Изобретение относится к области авиации, в частности к бортовому оборудованию, обеспечивающему навигацию, индикацию и управление вертолетом.
Известен комплекс бортового оборудования летательного аппарата, содержащий взаимосвязанные навигационную систему, систему задания исходных данных, прицельную систему, систему управления летательным аппаратом, систему управления средствами поражения, систему индикации, устройство коррекции параметров движения, устройство формирования параметров движения, формирующее в режиме локации наземных неподвижных целей информационные сигналы режима оптимальной коррекции навигационных и прицельных параметров, обеспечивающие точность навигации, управления и индикации, повышение точности применения средств поражения и, как следствие этого, повышение боевой эффективности оборудованных предлагаемым комплексом летательных аппаратов, особенно вертолетов и самолетов фронтового назначения (Патент RU 2120885. Комплекс бортового оборудования летательного аппарата. - МКИ В 64 С 13/20. 27.10.1998.). Данный комплекс бортового оборудования принят за прототип.
Недостатком известного изобретения, принятого за прототип, является ограниченный объем информации, необходимый при навигации, снижающий надежность полетов.
Задачей, на решение которой направлено заявляемое решение, является расширение функциональных возможностей учета параметров силовой установки и систем общевертолетного оборудования при навигации и повышение надежности работы комплекса.
Указанный технический результат достигается тем, что в известном интегрированном бортовом пилотажно-навигационном комплексе вертолета, содержащем навигационную систему, систему управления вертолетом, систему индикации, бортовую вычислительную машину, выполняющую функции задания исходных данных, формирования и коррекции параметров движения, выход которой подключен к первому входу системы управления вертолетом, а выход последней подключен к первому входу системы индикации, при этом выход навигационной системы подключен к вторым входам системы индикации и системы управления вертолетом, согласно предложенному техническому решению в него введены система преобразования аналоговой и дискретной информации, устройство интегрированного формирования информации и устройство сопряжения, а система индикации выполнена в виде интегрированного многофункционального перенастраиваемого индикатора, причем выход устройства сопряжения подключен к первым входам навигационной системы и бортовой вычислительной машины и третьему входу системы индикации, выход бортовой вычислительной машины подключен к первым входам устройства сопряжения и системы преобразования аналоговой и дискретной информации, выход последней подключен к второму входу бортовой вычислительной машины и четвертому входу системы индикации, к второму входу системы преобразования аналоговой и дискретной информации подключены датчики параметров силовой установки и систем общевертолетного оборудования, выход навигационной системы подключен к второму входу устройства сопряжения, при этом выход устройства интегрированного формирования информации соединен с вторым входом навигационной системы, с третьими входами системы управления вертолетом и системы преобразования аналоговой и дискретной информации, с четвертым входом бортовой вычислительной машины и пятым входом системы индикации, а вход - к выходу бортовой вычислительной машины; в него введен приемник спутниковой связи, вход которого соединен с антенной, а выход подключен к третьему входу бортовой вычислительной машины, образуя подсистему спутниковой навигации; в бортовую вычислительную машину введена схема выбора частоты и режима работы радиостанции, соединенная с входами в каналы управления; в навигационную систему введена подсистема генерации изображения картографической информации, а в систему индикации дополнительно введен второй многофункциональный индикатор, первый вход последнего соединен с выходом устройства сопряжения, второй вход - с выходом подсистемы генерации изображения картографической информации, третий вход - с выходом системы управления, четвертый вход - с выходом системы преобразования аналоговой и дискретной информации; в него дополнительно введена вторая бортовая вычислительная машина в комплекте с системой индикации, приемником спутниковой связи, схемой выбора частоты и режима радиостанции, соединенные между собой линиями связи, а система преобразования аналоговой и дискретной информации, устройство сопряжения и устройство интегрированного формирования информации выполнены двухканальными, входы вторых каналов которых соединены с выходом второй бортовой вычислительной машины; в систему навигации, систему преобразования аналоговой и дискретной информации, в устройство сопряжения и устройство интегрированного формирования информации введены контроллеры, образуя с бортовыми вычислительными машинами распределенную компьютерную систему.
Приведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного интегрированного бортового пилотажно-навигационного комплекса вертолета, отсутствуют. Следовательно, заявленное техническое решение соответствует условию патентоспособности "новизна".
Результаты поиска известных решений в данной области техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого технического решения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками из заявляемого технического решения преобразований на достижение указанного технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности "изобретательский уровень".
На фиг. 1 показана блок-схема интегрированного бортового пилотажно-навигационного комплекса вертолета (вариант 1); на фиг.2 - блок-схема системы индикации; на фиг. 3 - блок-схема интегрированного бортового пилотажно-навигационного комплекса вертолета (вариант 2).
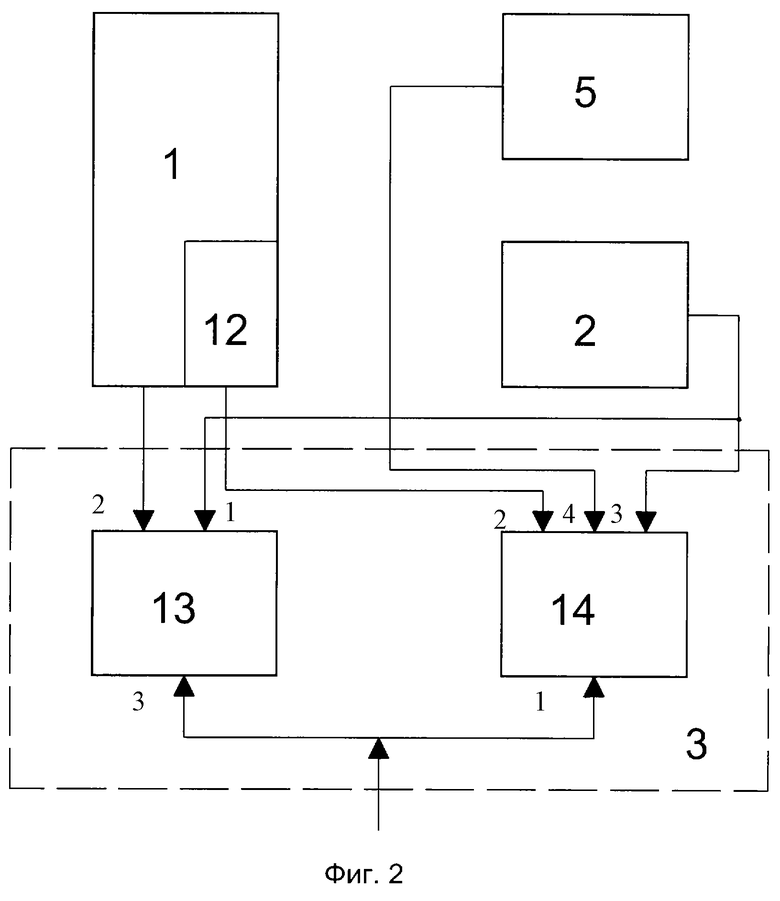
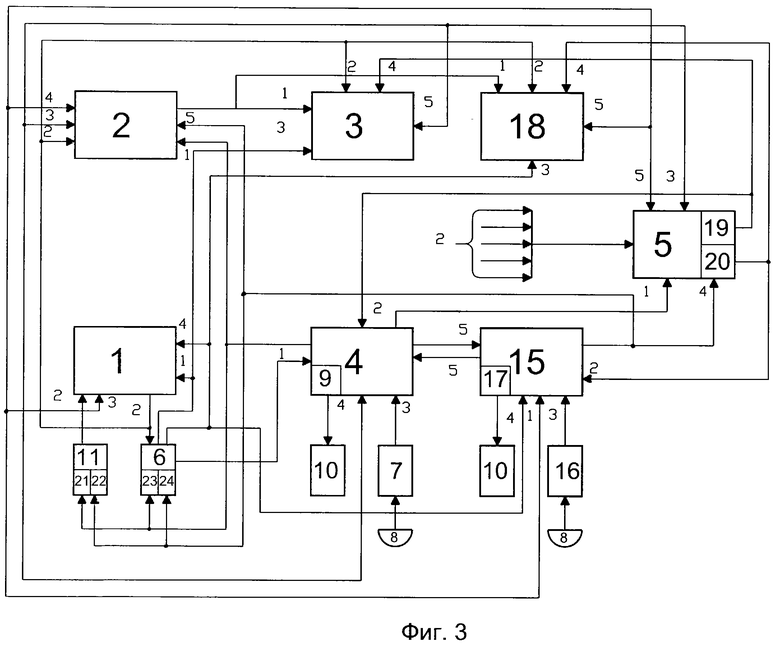
Интегрированный бортовой пилотажно-навигационный комплекс вертолета (вариант 1) содержит навигационную систему (НС) 1, систему управления вертолетом (СУВ) 2, систему индикации (СИ) 3, бортовую вычислительную машину (БЭВМ) 4, систему преобразования аналоговой и дискретной информации (СПАДИ) 5, устройство сопряжения (УС) 6, приемник спутниковой связи (ПСС) 7 со спутниковой антенной (СА) 8, введенную в БЭВМ-4 схему выбора частоты и режима работы (ВЧР) 9 радиостанции (PC) 10, устройство интегрированного формирования информации (УФИ) 11 (фиг.1). Выход БЭВМ-4 подключен к первым входам СПАДИ-5, УС-6, УФИ-11 и СУВ-2, а выход последней подключен к первому входу СИ-3, при этом выход НС-1 подключен к вторым входам СИ-3, УС-6 и СУВ-2, выход УС-6 подключен к первым входам НС-1 и БЭВМ-4 и третьему входу СИ-3. К второму входу СПАДИ-5 подключены датчики параметров силовой установки и систем общевертолетного оборудования, а выход подключен к второму входу БЭВМ-4 и четвертому входу СИ-3. Вход ПСС-7 соединен с СА-8, а выход подключен к третьему входу БЭВМ-4. Схема ВЧР-9 соединена с входами в каналы управления PC-10 Выход УФИ-11 соединен со вторым входом НС-1, с третьими входами СУВ-2 и СПАДИ-5, с четвертым входом БЭВМ-4 и пятым входом СИ-3. НС-1 содержит подсистему генерации изображения карторграфической информации (СГКИ) 12, а СИ-3 состоит из двух многофункциональных индикаторов (МФИ) 13 и 14 (фиг.2). Первый вход МФИ-14 соединен с УС-6, а второй вход - с выходом подсистемы СГКИ-12, третий вход - с выходом СУВ-2, четвертый вход - с выходом СПАДИ-5.
Интегрированный бортовой пилотажно-навигационный комплекс вертолета (вариант 2) содержит вторую БЭВМ-15 в комплекте с ПСС-16, ВЧР-17 и СИ-18, а СПАДИ-5, УФИ-11 и УС-6 содержат по два канала соответственно 19 и 20, 21 и 22, 23 и 24 (фиг.3). Входы вторых каналов 20, 22 и 24 соединены с выходом второй БЭВМ-15. Связи комплекса выполнены по однопроводным линиям, например, последовательного кода или мультиплексного информационного обмена.
Интегрированный бортовой пилотажно-навигационный комплекс вертолета работает следующим образом.
Для выполнения пилотажно-навигационных задач БЭВМ-4 работает с программно-математическим обеспечением, реализующим функции управления, сбора информации, оценки параметров, коррекции, формирования параметров движения, задания программы полета. УФИ-11 содержит программы полета, включающие несколько маршрутов с различными промежуточными пунктами маршрута, а также данные об эксплуатационных и предельных ограничениях параметров и режимов полета.
На этапе предполетной подготовки запускается двигатель и проводится автоматический предполетный расширенный контроль работоспособности комплекса, систем и агрегатов вертолета. Для чего с пульта БЭВМ-4 включается программа тестового контроля, при работе которой с выхода БЭВМ-4 поступают команды на первые входы СПАДИ-5 и УС-6, последнее подает стимулирующие сигналы на первый вход НС-1, производит опрос ее выходных сигналов и передает их на вход 1 БЭВМ-4, а СПАДИ-5 по второму входу датчиков контроля силовой установки и общевертолетных систем снимает информацию, которая передается по входу два в БЭВМ-4. По результатам автоматического предполетного расширенного контроля в БЭВМ-4 формируется интегральный сигнал исправности и готовности к полету, который выдается на третий вход СИ-3.
При поступлении информации о готовности комплекса и систем вертолета к полету с выхода БЭВМ-4 через первый вход УФИ-11 вводятся данные о навигационной обстановке района действия вертолета и контроль правильности ввода (координаты, высота, направление входа на навигационную точку, характерные признаки). Затем с выхода БЭВМ-4 на первый вход УФИ-11 поступает команда, по которой выбирается заданная программа полета с учетом метеопрогностической информации.
На этапе управления полетом с выхода УФИ-11 поступают котировочные характеристики и исходные данные: координаты ориентиров для НС-1, балансировочные характеристики и величины ограничений сигналов управления для СУВ-2. В НС-1 формируются навигационные параметры: координаты местоположения, углы и составляющие скорости движения вертолета с учетом данных, поступивших по первому входу с УФИ-11. В СУВ-2 по заданным сигналам, поступившим на первый, второй и третий входы, формируются сигналы автоматического управления и сигналы экипажу для осуществления ручного, полуавтоматического и автоматического управления вертолетом, которые с выхода СУВ-2 поступают на первый вход СИ-3 и на органы управления вертолетом.
Переход с режима на режим полета производится СУВ-2 по введенному маршруту полета и схеме захода на посадку, по командам, поступающим от УФИ-11 по третьему входу. В процессе полета управление НС-1 осуществляется по программе от БЭВМ-4, а информация с выхода НС-1 выдается на вторые входы СИ-3 и УС-6, а от последнего - на первый вход БЭВМ-4, в которой данные от НС-1 обрабатываются с использованием алгоритмов статистической обработки. В СИ-3 по сигналам, поступившим на первый, второй и четвертый входы, осуществляется индикация навигационных, пилотажных данных для осуществления экипажем навигационного управления. На экране МФИ-13 информация отображается в текстовом и символьном виде, а на МФИ-14 - электронная карта, информация о состоянии силовой установки и общевертолетного оборудования. В зависимости от исправности блоков и режима полета производится автоматическая по программе и ручная от пультов реконфигурация структуры МФИ-13 и МФИ-14. Автоматическая или по команде экипажа (непрерывная или дискретная) коррекция счисленных координат вертолета (с обеспечением контроля достоверности поступающей информации): по спутниковой навигационной системе через СПП-7 и СА-8, по радиолокационным ориентирам, по данным адресного ответчика, по радиомаякам через PC-10. Управление PC-10 осуществляется с пульта или по программе БЭВМ-4 через ВЧР-9.
СПАДИ-5 взаимодействует с датчиками силовой установки, трансмиссии, системы электроснабжения и др. общевертолетным оборудованием. Связь с вертолетным оборудованием осуществляется в соответствии с протоколами взаимодействия и алгоритмами. По информации от СПАДИ-5 и УФИ-11, передаваемой на СИ-3 по пятому входу, обеспечивается предупреждение о достижении эксплуатационных ограничений параметров и режимов полета, формирование и выдача разовых предупреждающих сигналов о достижении эксплуатационных ограничений параметров и режимов полета с учетом их приоритетности и выдача рекомендуемых параметров полета, обеспечивающих его выполнение с оптимальными режимами по: минимальному километровому расходу топлива, минимальному часовому расходу топлива, максимальной прибыли, минимальной себестоимости, условно безопасного завершения полета в случае отказа оборудования и выхода параметров их за пределы допуска. В частности, при превышении уровня вибрации фюзеляжа МФ-14 информирует экипаж вертолета о немедленном снижении режима полета. По данным радиолокационного обзора земной поверхности и воздушного пространства подсистема СГКИ-12 генерирует изображения картографической информации и конфигурацию препятствий, которые поступают на второй вход МФИ-14, где формируются их изображения. При опасности сближения с землей, обнаружении опасных метеообразований и других летательных аппаратов в воздухе экипажу выдается информация об их координатах на МФИ-14 и предупреждающий сигнал.
Работа комплекса по второму варианту происходит в режиме дублирования БЭВМ-15 в комплекте с ПСС-16, ВЧР-17, СИ-18, каналов 19 и 20 СПАДИ-5, каналов 21 и 22 УФИ-11, каналов 23 и 24 УС-6.
На предложенный интегрированный бортовой пилотажно-навигационный комплекс вертолета разработана конструкторская документация и изготовлен опытный образец.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| Комплекс бортового радиоэлектронного оборудования вертолета | 2021 |
|
RU2771577C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2120885C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
Изобретение относится к бортовому оборудованию вертолета, обеспечивающему навигацию, индикацию и управление. Комплекс содержит взаимосвязанные навигационную систему, систему управления вертолетом, систему индикации, бортовую вычислительную машину, выполняющую функции задания исходных данных, формирования и коррекции параметров движения, систему преобразования аналоговой и дискретной информации, устройство интегрированного формирования информации, устройство сопряжения, приемник спутниковой связи, схему выбора частоты и режима работы радиостанции, введенную в бортовую вычислительную машину. Система индикации выполнена в виде интегрированного многофункционального перенастраиваемого индикатора. Комплекс характеризуется повышенной эксплуатационной надежностью и расширенными функциональными возможностями, позволяющими, в частности, осуществлять при навигации учет параметров работы силовой установки и систем общевертолетного оборудования. 6 з.п.ф-лы, 3 ил.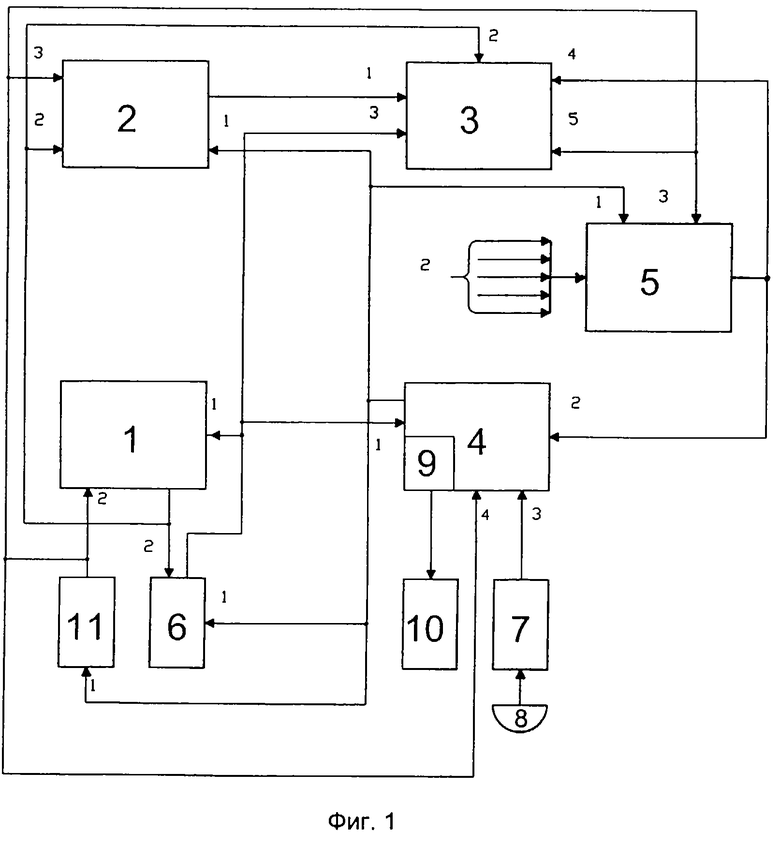
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2120885C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| RU 97101913 А, 20.03.1999 | |||
| US 6128554 А, 03.10.2000 | |||
| DE 3018200 А1, 27.11.1980. | |||
