ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данный документ описывает способы и блок вычисления в транспортном средстве. Более конкретно, он задает способ и блок вычисления для построения и использования базы данных, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства на основе построения карты, и способ и блок вычисления для прогнозирования маршрута движения для транспортного средства.
УРОВЕНЬ ТЕХНИКИ
При управлении транспортным средством существует множество преимуществ в возможности прогнозирования того, как будет выглядеть маршрут движения, например, если лучший выбор передачи может быть сделан, если у транспортного средства есть автоматическая коробка передач или автоматизированная ручная коробка передач (AMT). Например, таким образом, может быть сэкономлено топливо и улучшены дорожные качества автомобиля.
"Транспортное средство" в данном контексте означает, например, транспортное средство товаров, фуру для перевозки грузов на дальнее расстояние, грузовой автомобиль на легком шасси, фургон, автопогрузчик, автобус, мотоцикл, транспортное средство повышенной проходимости, транспортное средство на гусеничном ходу, снегоход, танк, вездеходное транспортное средство, трактор, легковой автомобиль или другой подобный моторизированный с управлением человеком или с управлением без человека транспорт, приспособленный к сухопутному географическому передвижению.
При переключении передачи в транспортном средстве трансмиссия транспортного средства находится в состоянии уменьшения вращающего момента во время переключения. Транспортное средство, таким образом, не продвигается за счет двигателя в течение времени, пока смещение не закончится, а скорее катится далее в направлении движения в результате инерции. В, например, коробке передач AMT часто есть три части, то есть разъемное зубчатое колесо, главный приводной вал и коробка диапазонов, которые взаимодействуют друг с другом. Во время переключения главная передача помещается в нейтральную позицию, затем разъемное зубчатое колесо и/или коробка диапазонов переключаются от большой к малой или наоборот. Новая передача на главном приводном валу может затем быть задействована. Это приводит к тому, что процесс переключения занимает время, а следовательно, скорость транспортного средства уменьшается во время процесса переключения.
Это может создавать трудности транспортному средству и его водителю, например, когда передача переключается на более высокую передачу, когда транспортное средство двигается по прямому участку дороги непосредственно перед тем, как начинается участок дороги с крутым подъемом, идущим в гору. Если коробка передач пробует переключить передачу на более высокую, то количество оборотов в минуту новой более высокой передачи может быть слишком малым, что приведет к уменьшению скорости транспортного средства, которая в свою очередь заставит двигатель генерировать такой низкий вращающий момент, что транспортное средство не сможет справиться, и двигатель затем глохнет; альтернативно, коробка передач немедленно переключает передачу на более низкую, что приведет к другому состоянию, уменьшения вращающего момента и, таким образом, к дальнейшему уменьшению скорости транспортного средства.
Один способ избежать этого состоит в том, чтобы использовать картографические данные, содержащие информацию об уклонах, выявлять позицию транспортного средства и направление движения посредством, например, GPS, прогнозирования маршрута движения и будущих условий уклонов и, например, запрещать переключение на более высокую передачу, если прогнозируется идущий в гору участок дороги; или выполнять переключение на более низкую передачу немедленно перед тем, как начнется участок дороги, идущий в гору.
Одна проблема состоит в том, что картографические данные с информацией об уклонах не всегда доступна, например, далеко от главных шоссе или в ландшафте вне дорожной системы. Трудные условия вождения часто преобладают здесь, такие как вождение в рудниках, где тяжелые нагрузки и участки дороги, идущие в гору, часто попадаются в комбинации с низкокачественными дорогами, которые ограничивают скорость или отсутствие дороги вообще. Условия могут быть аналогичными в комбинации с, например, зданием, строительной площадкой или вождением грузового автомобиля с прицепом на ярко выраженных или изрытых колеями гравийных дорогах в лесу, или вождением по пересеченной местности в транспортном средстве повышенной проходимости.
Может также быть так, что окружение постоянно изменяется, например, в руднике с открытыми работами, в результате чего сохраненные картографические данные быстро становятся устаревшими, даже если они доступны. Прогнозирование, которое является ошибочным, и которое приводит к ошибочному переключению передач, зачастую хуже, чем отсутствие прогнозирования, в результате чего водитель в таких ситуациях часто выбирает использование ручной коробки передач, если такое переключение возможно в транспортном средстве.
Иногда нет никакого заданного маршрута движения между двумя пунктами или множества альтернативных маршрутов движения. Примером этого может быть то, что может быть одна короткая и прямая, но с крутым подъемом, дорога, и одна длинная вьющаяся, но менее крутая дорога. В таких случаях условия переключения передачи полностью различны. Даже если будет доступ к картографическим данным с информацией об уклонах, это будет небольшой помощью с точки зрения переключения передач, если не будет известно, которую из альтернативных дорог транспортное средство и его водитель выберут.
US 6847887 описывает систему для сбора навигационных данных, в которой нагрузка на двигатель используется в качестве параметра. Измерение давления, сделанное посредством барометра, используется в системе, чтобы определять высоту и уклон. Эта система относится только к вождению на дорогах и не относится к изменениям в них. И при этом не делает прогнозирования относительно маршрута движения, если множественные альтернативы представлены.
WO 2010147730 описывает способ для генерирования навигационных данных в транспортной сети. Способ основан на измерении и статистическом анализе - какие маршруты движения принимают различные транспортные средства на основании множества различных параметров транспортного средства. Нет никакого упоминания о том, как построена база данных для ландшафта.
EP 921509 описывает способ для обновления и улучшения картографических и географических данных посредством оснащения множества транспортных средств датчиками и посредством анализа результатов статистически. Датчики могут считывать множество релевантных параметров, а программа может затем анализировать и сравнивать результаты с текущими географическими данными и обновлять их. Картографические данные могут, таким образом, постепенно обновляться в качестве изменений дороги. Этот способ не рассматривает, как карта может быть построена в бездорожном ландшафте или прогнозирование маршрутов движения, чтобы облегчать соответствующие выборы передачи.
WO 2009133185 описывает систему для итерационного генерирования цифровой карты посредством датчиков, которые считывают топографию и сохраняют данные в памяти. Эта система не рассматривает проблему выявления направления движения или прогнозирования маршрута движения для транспортного средства. И при этом не обсуждает проблему, как построение карты может использоваться для управления функциями в транспортном средстве, такими как переключение передач.
GB 2428852 описывает, помимо прочего, способ для построения карты для развозных автомобилей, при этом составляется карта отличий между различными маршрутами движения. Документ не содержит ничего о топографических отличиях между различными маршрутами движения, и еще меньше о том, как сохраненная карта может быть использована для управления функциями в транспортном средстве такими, как переключение передач.
Ясно, что многое необходимо сделать, чтобы улучшить прогнозирование маршрута движения для транспортного средства, особенно в областях, где есть недостаток дорог, где ландшафт изменяется быстро, где есть недостаток картографических данных или где картографические данные быстро устаревают.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, целью этого изобретения является решение по меньшей мере одной из вышеописанных проблем и достижение улучшенного прогнозирования маршрута движения для транспортного средства.
Согласно первому аспекту изобретения эта цель достигается посредством способа для построения базы данных, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства. Способ содержит выявление географической позиции транспортного средства посредством блока позиционирования. Способ далее содержит выявление направления движения транспортного средства в выявленной географической позиции. Способ также содержит измерение по меньшей мере одного зависимого от местоположения параметра в выявленной географической позиции. Способ также содержит сохранение в базе данных измеренного зависимого от местоположения параметра в ассоциации с выявленным направлением движения и выявленной географической позицией транспортного средства.
Согласно другому аспекту изобретения данная цель достигается посредством блока вычисления, скомпонованного, чтобы построить базу данных, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства. Блок вычисления содержит схему процессора, скомпонованную, чтобы выявлять географическую позицию транспортного средства посредством блока позиционирования. Схема процессора также скомпонована, чтобы выявлять направление движения транспортного средства в выявленной географической позиции. Схема процессора далее скомпонована, чтобы измерять по меньшей мере один зависимый от местоположения параметр в выявленной географической позиции посредством датчика. Схема процессора также скомпонована, чтобы сохранять в базе данных измеренный зависимый от местоположения параметр в ассоциации с выявленным направлением движения и выявленной географической позицией транспортного средства.
Согласно другому аспекту изобретения данная цель достигается посредством способа для прогнозирования маршрута движения для транспортного средства. Способ содержит выявление географической позиции транспортного средства посредством блока позиционирования. Способ далее содержит выявление направления движения транспортного средства в выявленной географической позиции. Способ также содержит выявление сохраненной позиции в базе данных, которая совпадает с выявленной географической позицией транспортного средства. Способ также содержит прогнозирование маршрута движения на основании рассчитанной вероятности сохраненных направлений движения в выявленной позиции. Способ также содержит извлечение информации, содержащей сохраненный зависимый от местоположения параметр, ассоциированный с спрогнозированным маршрутом движения.
Измерение и сохранение данных, связанных с местоположением, и ассоциация их с соответствующей географической позицией и построение статистики относительно различных входящих направлений и исходящих направлений к и от каждой соответствующей позиции делают возможным, зная направление, откуда оно прибывает и текущую позицию, спрогнозировать, какой маршрут движения является наиболее вероятным для транспортного средства в вопросе выбора на основании частоты ранее сделанных выборов маршрутов движения. Это позволяет спрогнозировать маршрут движения для транспортного средства даже в области, где недостает данных дороги и/или, где дороги даже отсутствуют. Кроме того, некоторые варианты осуществления позволяют спрогнозировать маршрут движения даже в быстро изменяющейся среде или непредсказуемом случае, таким как открытый рудник, строительная площадка или область заготовки леса. Тем самым достигается улучшенное прогнозирование маршрута движения для транспортного средства.
Другие преимущества и дополнительные элементы новизны будут представлены в детальном описании ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описаны более подробно со ссылками на сопровождающие чертежи, которые иллюстрируют различные примерные варианты осуществления:
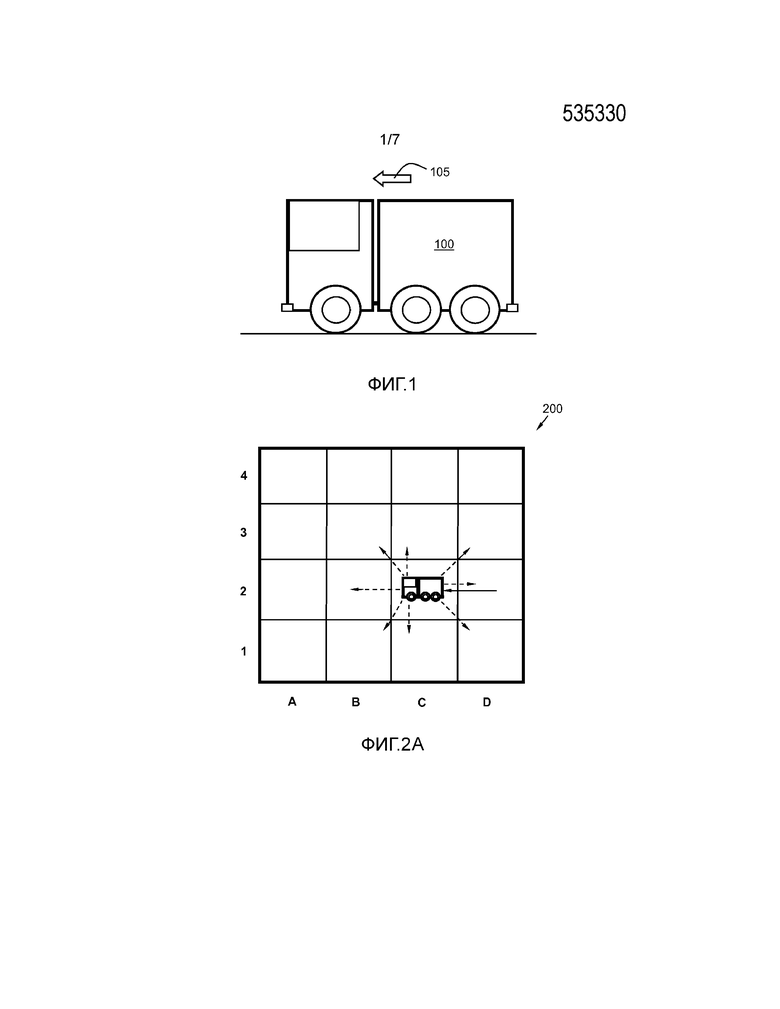
Фигура 1 иллюстрирует транспортное средство согласно одному варианту осуществления.
Фигура 2A иллюстрирует представление ландшафта согласно одному варианту осуществления.
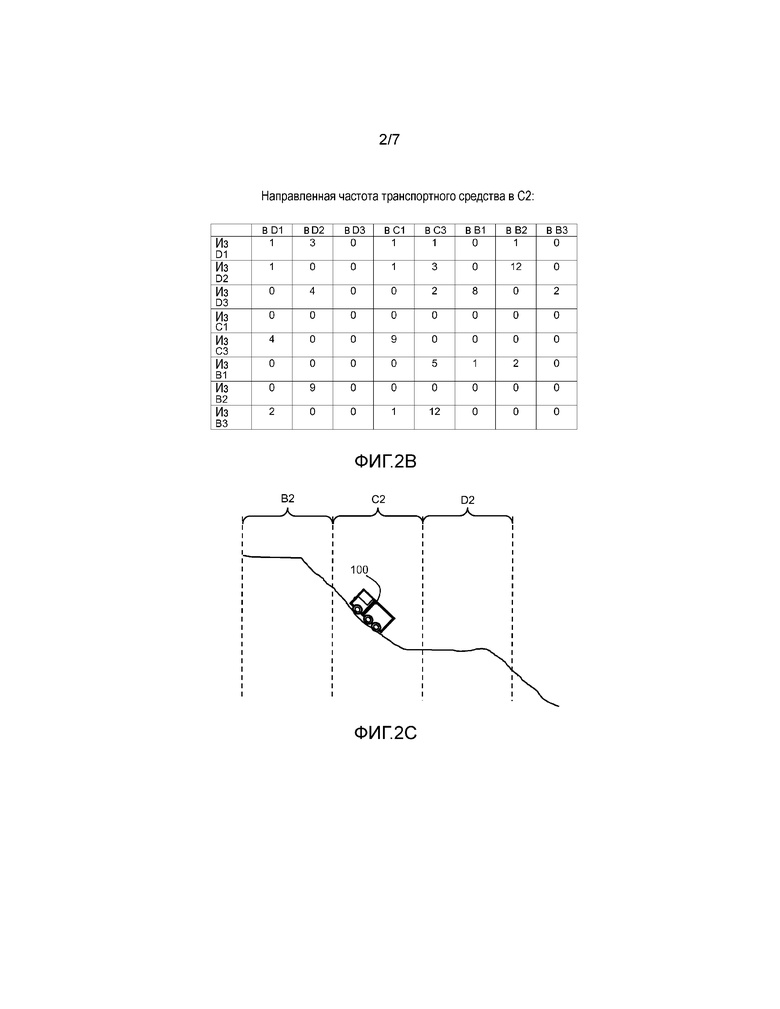
Фигура 2B иллюстрирует пример направленной статистики для позиции в представлении ландшафта согласно одному варианту осуществления.
Фигура 2C поясняет пример топографических различий на различных местоположениях в ландшафте.
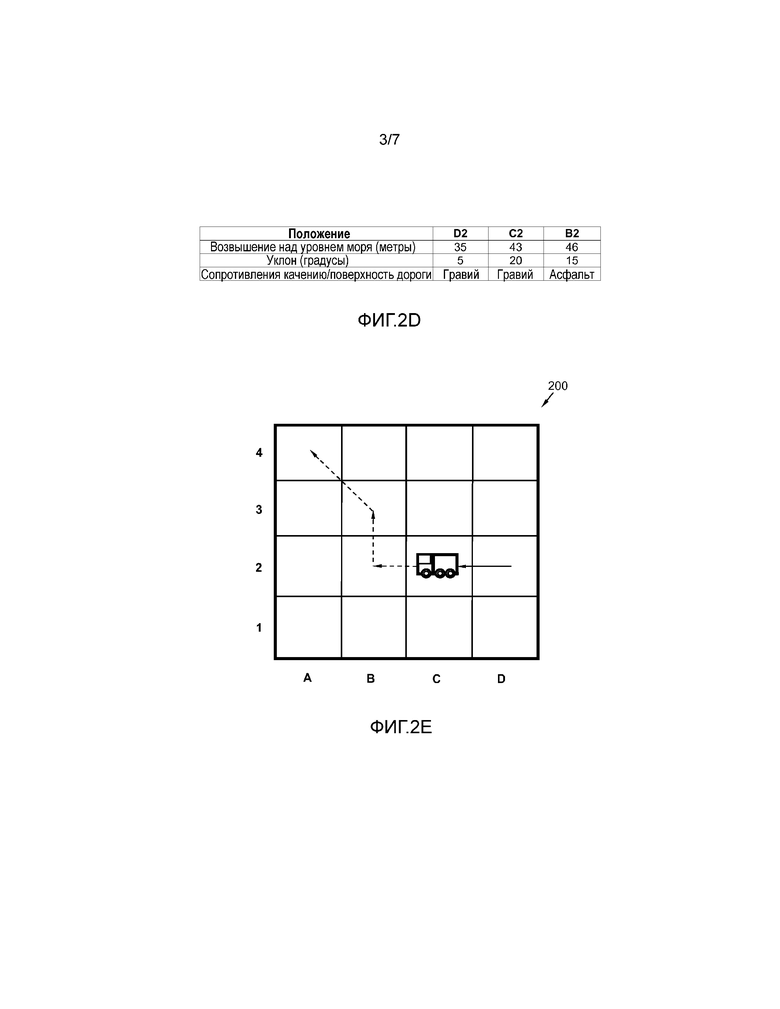
Фигура 2D показывает пример данных, сохраненных в ассоциации с заданной позицией.
Фигура 2E показывает пример прогнозирования маршрута движения.
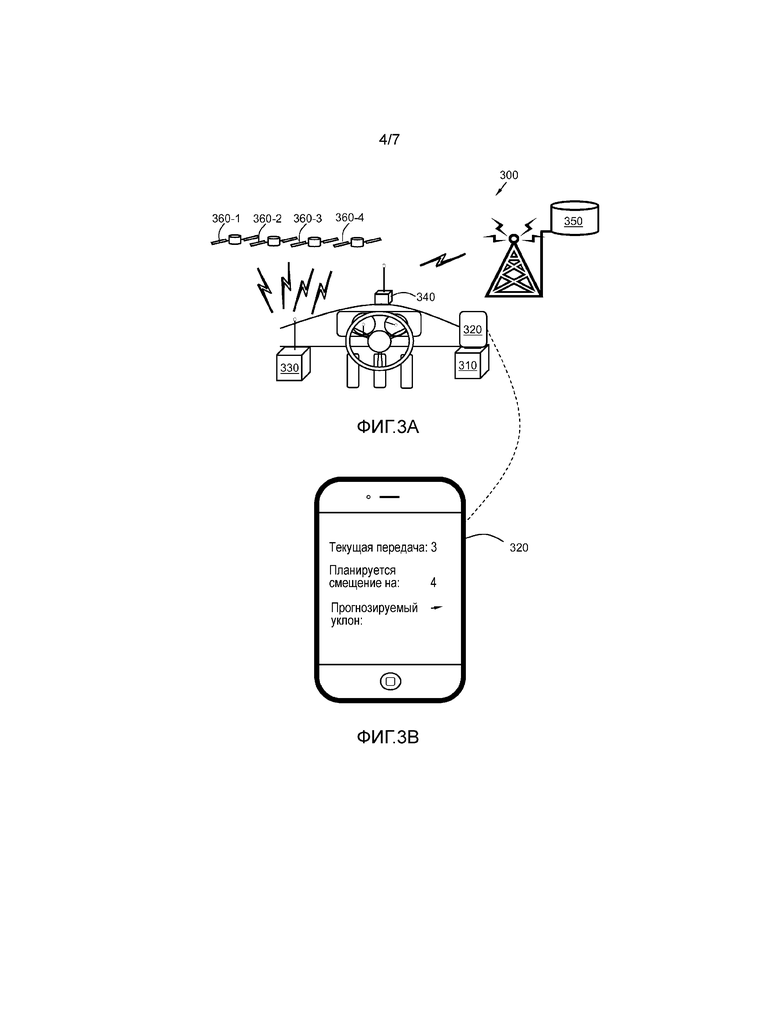
Фигура 3A иллюстрирует пример среды водителя в транспортном средстве, скомпонованной согласно одному варианту осуществления способа.
Фигура 3B иллюстрирует пример пояснения спрогнозированных условий вождения согласно одному варианту осуществления.
Фигура 4 является блок-схемой, которая иллюстрирует один вариант осуществления изобретения.
Фигура 5 является иллюстрацией блока вычисления согласно одному варианту осуществления изобретения.
Фигура 6 является блок-схемой, которая иллюстрирует один вариант осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления изобретения содержат способы и блок вычисления, который может реализоваться в соответствии с любым из примеров, описанных ниже. Это изобретение может, однако, реализоваться во многих различных формах и не должно рассматриваться как ограниченное посредством вариантов осуществления, описанных здесь, которые предназначены скорее, чтобы объяснить и пояснить различные аспекты.
Дополнительные аспекты и характеристики изобретения могут быть подобраны из следующего подробного описания, где они рассматриваются в соединении с сопровождающими фигурами. Однако, эти фигуры должны рассматриваться только как примеры различных вариантов осуществления изобретения и не должны рассматриваться в качестве ограничений для изобретения, которое ограничивается исключительно приложенной формулой изобретения. Кроме того, фигуры не обязательно вычерчены в масштабе и, если иначе специально не обозначено, предназначаются, чтобы иллюстрировать аспекты изобретения концептуально.
Фигура 1 показывает транспортное средство 100, приспособленное к движению посредством двигателя, среди других, и первое направление движения 105. Транспортное средство 100 может, например, но не обязательно, быть грузовым автомобилем, автобусом или быть любым типом транспортных средств, из перечисленных выше, или подобным сухопутным средством транспортировки. Транспортное средство 100 может также, например, но не обязательно, быть специально адаптированным к работе в любой местности или скомпонованным для подвижности в тяжелых дорожных условиях, содержащих крупные топографические изменения, неровные дорожные покрытия и/или дорожные покрытия с изменяющимся трением.
Согласно одному варианту осуществления транспортное средство 100 может быть скомпоновано, чтобы собирать связанные с местоположением данные такие, как позиция, возвышение и/или уклон от передатчиков в транспортном средстве таких, как глобальная система позиционирования (далее GPS), акселерометр и/или датчик давления. Собранные данные затем используются для генерирования карты возвышений и/или уклонов ландшафта. Иногда нет заданных дорог через местность. Согласно одному варианту осуществления протяженность дороги может рассчитываться и прогнозироваться посредством построения статистической базы данных. Чтобы спрогнозировать дорожный уклон или различное возвышение впереди на дороге, наиболее вероятная дорога вперед может быть спрогнозирована, и дорожный уклон или различное возвышение, ассоциированное с точкой вдоль наиболее вероятной дороги вперед, могут использоваться в качестве основания для, например, переключения передачи.
В некоторых вариантах осуществления дополнительные параметры такие, как вес транспортного средства, тип транспортного средства, транспортное средство, время, время года, условия осаждения, температура и т.д. могут также быть включены в статистическую базу данных, чтобы далее сделать возможным обеспечение хорошего прогнозирования для управления трансмиссией.
Таким образом, может стать возможным спрогнозировать, например, поворачивает ли часто транспортное средство 100 налево в определенной точке, когда оно полностью загружено, и поворачивает ли направо, когда у него нет никакой загруженности.
Фигура 2A показывает пример представления ландшафта. В некоторых вариантах осуществления транспортное средство 100 может изначально иметь пустую двумерную рабочую карту 200 в памяти, например, содержащую долготу и широту. Каждая точка на упомянутой рабочей карте 200 может соответствовать секции ландшафта, в которой располагается транспортное средство 100. Такая секция может иметь размеры, например, 10×10 метров или альтернативное многократное фракционирование такого размера. Согласно некоторым вариантам осуществления рабочая карта 200 может быть основана на матрицы, в которой каждый матричный элемент соответствует двумерной секции ландшафта. В некоторых вариантах осуществления рабочая карта 200 может быть основана на векторе или содержать смесь векторов и матричных элементов. Например, векторные элементы могут использоваться в секциях, где есть только один допустимый или наиболее вероятный маршрут движения. Такой маршрут движения может состоять из подходящего маршрута движения, который используется в качестве транспортного маршрута движения в область работы, например, или в ландшафте, где природные условия делают возможным движение только вдоль одного осуществимого маршрута движения через заданную часть ландшафта, которая соответствует рабочей карте 200.
В примере, показанном на фигуре 2A, транспортное средство 100 находится в секции местности, соответствующей позиции C2 на рабочей карте 200 в памяти. Входящее направление обозначено сплошной стрелкой в этом случае от позиции D2. Различные допустимые исходящие направления от позиции C2 обозначены пунктирными стрелками и содержат D1, D2, D3, C1, C3, B1, B2 и/или B3 в иллюстрированном примере.
Статистика для каждой секции может затем считываться для различных зависимых от местоположения переменных таких, как возвышение, от GPS, датчика давления, барометра, высотомера или другого типа измерителя возвышения, или получена через комбинацию значений, считанных со множества таких топологических инструментов. Статистика, имеющая отношение к уклону в каждой секции, может также или альтернативно быть получена. Такой уклон может быть обнаружен посредством акселерометра, инструмента уровня или другого датчика уклона, например, на основе спиртового уровня. Сопротивление качению может также быть измерено и сохранено в некоторых альтернативных вариантах осуществления. Это делает возможным обнаруживать тип дорожного покрытия, такой как гравий или асфальт. Кроме того, в некоторых формах время для хранения данных или обновления таковы, что данные могут, например, быть выбранными после заданного промежутка времени. В некоторых вариантах осуществления сохраненное время может быть использовано для фильтрования выбора статистики.
Кроме того, упомянутая статистика может включать в себя: исходящее направление от заданной секции в качестве функции входящего направления к позиции плюс, опционально, вес транспортного средства, тип транспортного средства, идентификацию транспортного средства, водителя транспортного средства, владельца транспортного средства или любой другой подобный связанный с транспортным средством параметр. Исходящее направление может также иметь отношение к следующей или последующей секции маршрута движения.
Фигура 2B показывает пример статистики, имеющий отношение к направленной частоте для транспортного средства 100, которое проезжает через C2. Зная направление, откуда прибывает транспортное средство 100, возможно спрогнозировать на основании частоты, какой будущий маршрут движения наиболее вероятен; в данном случае, когда транспортное средство 100 прибывает из D2, наиболее вероятный исход состоит в том, что транспортное средство 100 продолжит двигаться в направлении позиции B2. Прогнозирование маршрута движения может затем быть сделано на основании этого предположения. Кроме того, наиболее вероятным является результат, что позиция B2, как предполагается, является последующей позицией транспортного средства 100 с текущей позицией C2 в качестве направления прибытия. На основании вычисления частоты для позиции B2, используя C2 в качестве значение ввода, в результате полученное направление может затем быть спрогнозировано и так далее; см. также фигуру 2E.
При прогнозировании позиция рассчитывается посредством принятия наиболее вероятного исходящего направления (колонка с самым высоким значением для текущего ряда) для текущей позиции и направления прибытия. В некоторых вариантах осуществления статистический алгоритм может также иметь фактор забывания, чтобы позволить новым дорогам быть изученными и неподходящим дорогам быть забытыми. Статистика может также быть сделана зависимой от других параметров, таких как вес транспортного средства; статистическая таблица составляется затем для каждого выбранного диапазона веса, например 0-10 тонн, 10-20 тонн, 20-30 тонн и 30-40 тонн. Например, может случиться так, что транспортное средство 100 обычно выбирает одну дорогу, когда оно полностью загружено (чтобы транспортировать и разгрузить перевозимый груз) и выбирает другую дорогу, когда оно пусто (и движется, чтобы взять больше груза).
Дополнительные параметры могут также или альтернативно сохраняться и использоваться в выборе, такие как тип транспортного средства. Допустимо, что различные типы транспортных средств в открытом руднике, например, имели бы различные функции и, следовательно, перемещались бы на основании индивидуальных ездовых циклов.
Параметры, имеющие дело с дорожным покрытием, могут также использоваться в качестве выбора в соответствующем подходе. Может выясниться, что транспортные средства часто выбирают короткую, но крутую дорогу, когда поверхность дороги сухая, но выбирают длинную и пологую дорогу, когда дорожное полотно является скользким или сырым. Условие дорожного полотна может рассчитываться посредством, например, датчика дождя и/или термометра в транспортном средстве 100.
Каждая запись, сделанная в таблице, может также включать в себя временную отметку, которая позволяет отбросить значения, которые являются большими, чем заданный конфигурируемый срок ограничения и могут, следовательно, подозреваться в том, что они являются устаревшими.
Фигура 2C показывает примеры топографических отличий между различными позициями D2, C2, B2 в местности, где расположено транспортное средство 100.
Фигура 2D показывает примеры данных, которые сохраняются в ассоциации с соответствующими позициями D2, C2 и B2. В этом примере возвышение, уклон и сопротивление качению были сохранены, но это только один пример. Согласно некоторым вариантам осуществления зависимые от местоположения данные могут альтернативно быть ассоциированы с вышеупомянутым соответствующим направлением движения и/или временем, временем года, погодой, температурой или подобными данными. Кроме того, упомянутые данные могут также сохраняться вместе с или в ассоциации с весом транспортного средства, типом транспортного средства, идентификацией транспортного средства, водителем транспортного средства, владельцем транспортного средства или любым другим подобным связанным с транспортным средством параметром.
В некоторых вариантах осуществления возвышение и/или уклон могут быть пропущены через фильтр нижних частот (далее ФНЧ) по сравнению со старыми значениями в рабочей карте 200. Таким образом, эффекты шума могут быть уменьшены, и транспортное средство 100 может узнать, что местность изменяется все время при условии, что это происходит в связанной области. Собранная и сохраненная направленная статистика может затем быть использована для прогнозирования того, какую дорогу транспортное средство 100 выберет в следующий раз.
Фигура 2E иллюстрирует, как спрогнозированный маршрут движения для транспортного средства через рабочую карту 200 может выглядеть в примере.
Как только база данных построена, как показано на фигуре 2B, для множества позиций на рабочей карте 200, то она может быть использована для прогнозирования маршрута движения для транспортного средства 100. Направление движения и наиболее вероятный маршрут движения в этом примере B2 могут быть спрогнозированы от текущей позиции C2 и предыдущей позиции D2 на основании анализа частоты. Новая позиция карты B2 достигается, исходя из этого нового вычисленного направления, и следующее наиболее вероятное направление для упомянутой новой позиции B2 может затем вычисляться, используя направление от C2 как значение ввода и так далее. Таким образом, становится возможным использование текущей позиции C2 транспортного средства и его ранее известной позиции D2 в качестве значений ввода, чтобы спрогнозировать не только последующую позицию B2, но также и какой будущий маршрут движения через множество позиций здесь B2, B3, A4 наиболее вероятен для транспортного средства 100, чтобы принять двумерную рабочую карту 200, например, с опережением 500 метров.
Как только будущий маршрут движения был спрогнозирован для транспортного средства 100, сохраненный зависимый от местоположения параметр, включающий, например, топографические данные, такие как данные возвышения или уклона для соответствующих позиций B2, B3, A4, может быть использован для прогнозирования предстоящего дорожного уклона.
В некоторых вариантах осуществления транспортное средство 100 может продолжить непрерывно обновлять базу данных все время во время движения даже когда прогнозируются будущая дорога и уклон. Это позволяет обновлять базу данных текущими данными все время.
Как только транспортное средство 100 достигает края текущей рабочей карты 200, следующая последующая рабочая карта в спрогнозированном направлении движения может быть считана, например, из базы данных, если такие данные доступны, то есть, если транспортное средство 100 было там ранее или если используются данные от других транспортных средств.
Кроме того, когда транспортное средство 100 приближается к краю текущей рабочей карты 200, обновленные данные в связанных секциях могут быть сохранены в базе данных. Связанные секции могут содержать позиции с изменениями уклона или изменениями возвышения, которые превышают заданное выверенное пороговое значение. Направленная статистика для этих релевантных секций также сохраняется, чтобы сделать возможным прогнозирование возвращения туда транспортного средства 100 в следующий раз. Статистика относительно того, как другие зависимые от местоположения рабочие параметры влияют на выбор дороги/направления, например, температура и, таким образом, любое ледяное формирование или осадок и потенциально более скользкая дорога, которая может образоваться в результате этого, может также опционально сохраняться. Эти сохраненные данные можно затем, например, послать в центральную базу данных и/или сервер, чтобы впоследствии они подлежали отправке в другие транспортные средства.
Кроме того, прогнозирование возвышения и/или уклона, искривление маршрута движения впереди может быть включено согласно некоторым вариантам осуществления. Искривление дороги может быть использовано для расчета сопротивления качению; если дорога изогнется кардинально, то сопротивление качению увеличится, и необходимо использовать более низкую передачу, если спрогнозированное сопротивление качению превысит заданное значение предела.
Согласно некоторым вариантам осуществления, данные от транспортных средств, отличных от головного транспортного средства 100, могут использоваться по-разному и в разной степени. Эти альтернативы могут также быть объединены и оценены по-разному; вот некоторые их примеры: 1) транспортное средство 100 использует только данные, которые само транспортное средство ранее ввело в базу данных. 2) транспортное средство 100 использует данные от себя согласно альтернативе 1 плюс данные, приобретенные из базы данных или сервера, в который транспортные средства, сделанные тем же производителем, отправляют данные. 3) транспортное средство использует данные от себя согласно альтернативе 1 и от других транспортных средств, имеющих одного и того же владельца, например буксирующая компания, горнодобывающая компания или подобное. 4) транспортное средство использует больше параметров, чем просто направление, чтобы спрогнозировать выбор дороги. В некоторых вариантах осуществления для пользователя также возможно конфигурировать это в транспортном средстве 100 и выключать эту функцию прогнозирования или ограничивать выбор, если это кажется ошибочным.
Согласно некоторым вариантам осуществления при прогнозировании наиболее вероятного маршрута движения потенциальное знание конечного пункта назначения, которое может быть приобретено из оборудования навигации транспортного средства, используется для улучшения расчета наиболее вероятного маршрута движения. Например, проверка может, таким образом, быть осуществлена относительно того, совместим ли спрогнозированный маршрут движения с конченым пунктом назначения, и может генерироваться большая надежность в спрогнозированный маршрут движения, если они совместимы.
Кроме того, согласно некоторым вариантам осуществления, дальнейшие действия могут быть выполнены относительно того, совместима ли текущая позиция транспортного средства с спрогнозированным маршрутом движения. Если транспортное средство 100 оказывается за пределами ранее спрогнозированного маршрута движения, то это прогнозирование можно учитывать как ошибочное, и новое прогнозирование может быть построено, используя текущую позицию транспортного средства в качестве отправной точки. Это, таким образом, позволяет избежать или уменьшить риск решения относительно, например, переключения передачи в транспортном средстве на основе ошибочного прогнозированного маршрута движения.
Достоверная и текущая информация приобретается, позволяя транспортному средству 100 самостоятельно построить карту местности, включая типы ландшафта, где есть нехватка информации или даже дорог. Карта 200 адаптирует себя к изменениям автоматически в ландшафте, обусловленном добычей полезных ископаемых, раскопками, подрывными работами, строительством, хранением материальных ресурсов, заготовкой леса, строительством мостов, подачей руды на поверхность или подобного. Предсказанный выбор дороги и уклон дороги могут в некоторых вариантах осуществления быть спрогнозированными с конкретным рассмотрением, заданным различными параметрами, такими как тип транспортного средства, вес транспортного средства и т.д., что дополнительно увеличивает надежность.
Фигура 3A показывает пример интерьера транспортного средства в транспортном средстве 100, который содержит систему 300, скомпонованную, чтобы построить базу данных 350, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства 100. Упомянутая база данных 350 может быть расположена в транспортном средстве 100 или вне транспортного средства 100 согласно различным вариантам осуществления.
Транспортное средство 100 содержит блок 310 вычисления, скомпонованный, чтобы построить базу данных 350, и чтобы спрогнозировать маршрут движения для транспортного средства 100. В одном варианте осуществления транспортное средство 100 содержит экран 320 отображения, который может, например, отображать выбранную в данный момент передачу, варианты передач и оцененный будущий уклон маршрута движения, как иллюстрировано на фигуре 3B.
Транспортное средство 100 содержит блок 330 позиционирования. Упомянутый блок 330 позиционирования может быть скомпонован, чтобы выявлять географическую позицию транспортного средства на основе системы для спутниковой навигации, такой как, например, глобальная система космической навигации (Navstar), глобальная система позиционирования (GPS), дифференциальная GPS (DGPS), Galileo, глобальная навигационная спутниковая система GLONASS или подобное.
Блок 330 позиционирования в транспортном средстве 100 выявляет географическую позицию транспортного средства. Это выявление позиции может быть сделано непрерывно в заданном заранее выявленном или конфигурируемом временном интервале согласно различным вариантам осуществления. Кроме того, водитель или пассажир самостоятельно могут альтернативно записать или отметить свою позицию, например, через клавиатуру, сенсорный экран или подобное устройство ввода.
Позиционирование, основанное на спутниковой навигации основано на ранжировании через триангуляцию от набора спутников 360-1, 360-2, 360-3, 360-4. Спутники 360-1, 360-2, 360-3, 360-4 непрерывно передают данные и информацию времени (например, в закодированной форме), идентичность (который спутник 360-1, 360-2, 360-3, 360-4 осуществляет передачу), статус и информацию, такую как где спутники 360-1, 360-2, 360-3, 360-4 расположены в заданный момент времени. Спутники GPS 360-1, 360-2, 360-3, 360-4 передают информацию в закодированном виде, используя кодовое разделение, например, на основании многостанционного доступа с кодовым разделением (CDMA). Это позволяет отличать информацию каждого индивидуального спутника 360-1, 360-2, 360-3, 360-4 от информации от других на основании уникального кода для каждого соответствующего спутника 360-1, 360-2, 360-3, 360-4. Эта переданная информация может затем быть принята подходящим адаптированным приемником GPS таким, как блок 330 позиционирования.
Согласно некоторым вариантам осуществления, ранжирование может происходить по той причине, что блок 330 позиционирования измеряет различия во времени, которое требуется для каждого соответствующего спутникового сигнала, чтобы быть принятым блоком 330 позиционирования. Поскольку эти сигналы перемещаются со скоростью света, то возможно вычислить, как далеко находится каждый соответствующий спутник 360-1, 360-2, 360-3, 360-4. Поскольку позиции спутников известны, так как они непрерывно отслеживаются посредством примерно 15-30 наземных радиостанций, расположенных, по существу, вдоль и вблизи экватора Земли, то возможно вычислить посредством триангуляции, где каждый их них расположен в широте и долготе, как только выявляются расстояния до по меньшей мере трех спутников 360-1, 360-2, 360-3, 360-4. Согласно некоторым вариантам осуществления, сигналы по меньшей мере от четырех спутников 360-1, 360-2, 360-3, 360-4 могут быть использованы для выявления высоты.
Кроме того, транспортное средство 100 может содержать устройство 340 связи, скомпонованное для беспроводной связи. Согласно различным вариантам осуществления такая беспроводная связь может осуществляться на основании, например, любой из следующих технологий: глобальная система мобильной связи (GSM), увеличенная скорость передачи данных для развития стандарта GSM (EDGE), универсальная система мобильных телекоммуникаций(UMTS), множественный доступ с кодовым разделением (CDMA), (CDMA 2000), множественный доступ с синхронным разделением во времени и частоте (TD-SCDMA), стандарт «Долгосрочное развитие» (LTE), усовершенствованный LTE; беспроводная достоверность (Wi-Fi), как определено посредством стандарта 802.11 a, ac, b, g и/или n Института Инженеров по Электротехнике и Электронике (IEEE), интернет-протокол (IP), Bluetooth и/или связь ближнего радиуса действия (NFС) или подобная технология связи. Это делает возможным передачу собранных зависимых от местоположения данных, таких как позиция, данные возвышения, данные уклона и т.д. в базу данных 350 во время движения, и извлечение из базы данных 350 данных для прогнозирования маршрута движения потенциально через базовую станцию или подобное. Как отмечено выше, это применяется, когда база данных расположена вне транспортного средства 100. В другом варианте осуществления база данных 350 может быть расположена в транспортном средстве 100.
Кроме того, транспортное средство 100 может содержать один или более датчиков для восприятия, например, топографических данных, таких как возвышение и/или уклон. Мгновенное возвышение транспортного средства, как отмечено выше, может быть считано посредством блока 330 позиционирования. Однако, возвышение транспортного средства может также или альтернативно быть обнаружено посредством датчика давления, барометра, высотомера или другого типа измерителя возвышения. Альтернативно, возвышение транспортного средства может быть выявлено посредством комбинирования значений, считанных из множества таких топологических инструментов, или по той причине, что водитель делает измерения или расчеты возвышения и вводит их через устройство ввода.
В некоторых вариантах осуществления уклон в позиции может также или альтернативно быть выявленным посредством датчика. Например, уклон в позиции может рассчитываться посредством акселерометра, инструментом уровня или другим датчиком уклона, например, на основании спиртового уровня или отвесной линии.
В некоторых вариантах осуществления сопротивление качению может измеряться и сохраняться посредством детекторов, скомпонованных с этой целью. Тип дорожного покрытия может быть обнаружен, например, гравий, мягкая глина или асфальт.
В одном варианте осуществления блок 310 вычисления может обмениваться данными с блоком 330 позиционирования в транспортном средстве 100 и с различными датчиками и детекторами в транспортном средстве 100, например, через коммуникационную шину транспортного средства, которая может состоять из одного или более из кабеля, базы данных, такая как CAN шина (шина сети локальных контроллеров), MOST шина (шина передачи данных мультимедийных систем), или любая другая конфигурация шины.
Согласно некоторым вариантам осуществления блок 310 вычисления может также или альтернативно быть скомпонован для беспроводной связи по беспроводному интерфейсу, такому как любой из беспроводных интерфейсов, перечисленных ранее.
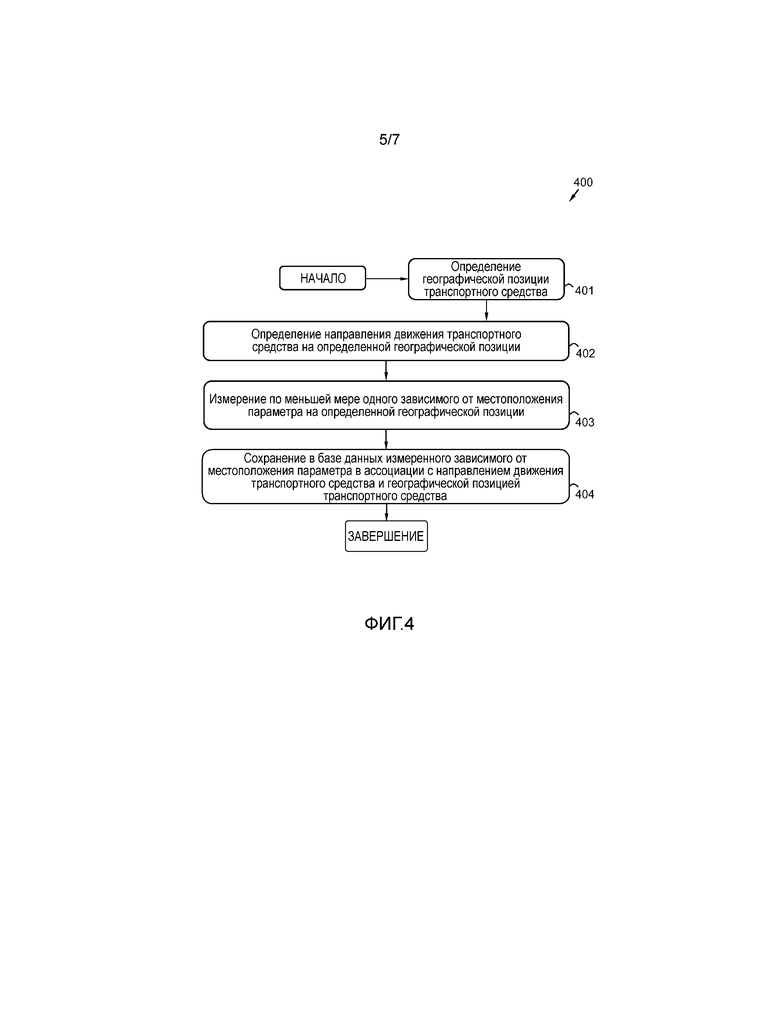
Фигура 4 иллюстрирует примерный вариант осуществления изобретения. Блок-схема на фигуре 4 поясняет способ 400 для построения базы данных 350, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства 100. База данных 350 содержит представление ландшафта. В некоторых вариантах осуществления упомянутое представление ландшафта в базе данных 350 может быть на основе матрицы, в которой каждый матричный элемент соответствует двумерной секции ландшафта.
Во время построения базы данных 350 способ 400 может содержать несколько этапов 401-404. Кроме того, описанные этапы 401-404 могут выполняться в хронологическом порядке, несмотря на их обозначения посредством порядкового номера. Некоторые описанные этапы 401-404 могут также выполняться параллельно друг с другом. Способ 400 содержит следующие этапы:
Этап 401
Позиция транспортного средства выявляется посредством блока 330 позиционирования, например, посредством спутникового позиционирования.
Такое позиционирование, основанное на использовании спутника, может содержать или существовать на основании, например, GPS, Navstar, DGPS, Galileo, GLONASS или подобного. Однако, другие формы позиционирования могут быть включены согласно некоторым вариантам осуществления, например, сам водитель может обозначать свою текущую позицию, например, на сенсорном экране, клавиатуре или другом устройстве ввода для блока 330 позиционирования.
В некоторых вариантах осуществления, в которых представление ландшафта в базе данных 350 основано на матрице, может быть определена секция, в которой расположено транспортное средство 100.
Этап 402
Направление движения транспортного средства обнаруживается в определенной 401 географической позиции.
В некоторых вариантах осуществления направление движения транспортного средства выявляется посредством определения направления, откуда транспортное средство 100 прибывает в географическую позицию и направления, куда транспортное средство 100 отправляется из географической позиции.
В некоторых вариантах осуществления направление движения транспортного средства определяется посредством определения географической позиции, откуда транспортное средство 100 прибывает в географическую позицию и географической позиции, куда транспортное средство 100 отправляется из географической позиции.
Этап 403
По меньшей мере один зависимый от местоположения параметр измеряется в определенной 401 географической позиции.
Такие зависимые от местоположения параметры могут содержать, например, связанный с возвышением параметр, который может быть измерен посредством, например, GSM, датчика давления, барометра, высотомера или подобного. Кроме того, измерение возвышения может быть сделано через комбинацию измерений посредством множества различных датчиков, например, любого из вышеупомянутых. Улучшенная точность в измерении возвышения может быть приобретена, таким образом, в некоторых вариантах осуществления.
Зависимый от местоположения параметр может содержать, например, возвышение, уклон, сопротивление качению дорожному покрытию, искривление земли, среднюю скорость движения, время, погоду, дату, температуру, скорость, вовлеченную передачу, тип транспортного средства и/или вес транспортного средства.
Этап 404
Измеренный 403 зависимый от местоположения параметр сохраняется в базе данных 350 в ассоциации с определенным 402 направлением движения и определенной 401 географической позицией транспортного средства.
Хранение измеренных 403 зависимых от местоположения параметров может также включать в себя создание различных статистических таблиц для различных диапазонов веса транспортного средства, таких как 0-10 тонн, 10-20 тонн, 20-30 тонн и 30-40 тонн, и сохранение происходит в статистической таблице, которая соответствует диапазону веса транспортного средства для транспортного средства.
В некоторых вариантах осуществления сохранение также содержит подсчет, поддерживаемый счетчиком по направлению движения транспортного средства в определенной 401 географической позиции транспортного средства 100.
Такой счетчик по направлению движения транспортного средства увеличивает показания до максимального значения; и когда максимальное значение для заданного направления движения достигается, то счетчики по другим направлениям движения в определенной (401) географической позиции уменьшают показания.
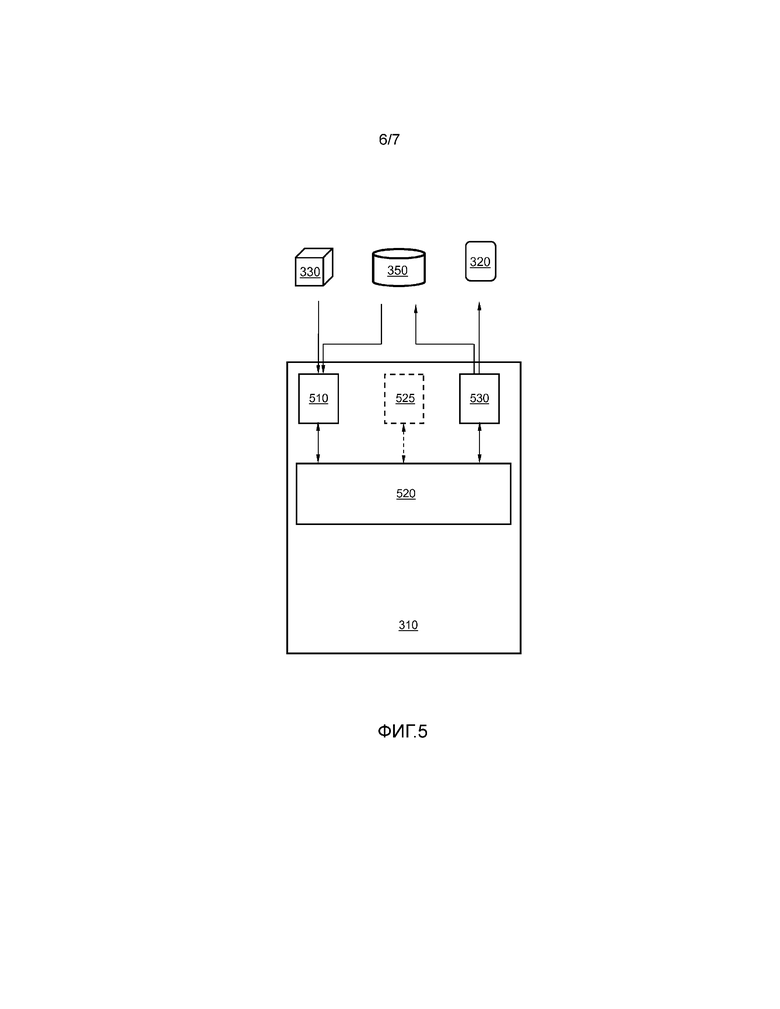
Фигура 5 иллюстрирует вариант осуществления блока 310 вычисления для построения базы данных 350, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства 100.
Упомянутый блок 310 вычисления сконфигурирован, чтобы выполнять, по меньшей мере, некоторые вышеописанные из этапов 401-404 способа, содержащихся в способе 400 для построения базы данных 350, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства 100. В некоторых вариантах осуществления блок 310 вычисления может также, или альтернативно, конфигурироваться, чтобы прогнозировать маршрут движения для транспортного средства 100.
Чтобы быть в состоянии построить базу данных 350 должным образом и, таким образом, сделать возможным прогнозирование маршрута движения, блок 310 вычисления содержит несколько компонентов, которые будут описаны подробно в тексте ниже. Некоторые описанные вторичные компоненты есть в некоторых, но не обязательно во всех, вариантах осуществления. Дополнительная электроника может также быть представлена в блоке 310 вычисления, которая не является необходимой, чтобы понять функции блока 310 вычисления согласно изобретению, и была в результате опущена на фигуре 5 и в этом описании.
Блок 310 вычисления содержит схему 520 процессора, которая скомпонована, чтобы определять географическую позицию транспортного средства через блок 330 позиционирования. Схема 520 процессора также скомпонована, чтобы определять направление движения транспортного средства в определенной географической позиции. Схема 520 процессора также скомпонована, чтобы измерять по меньшей мере один зависимый от местоположения параметр в определенной географической позиции посредством датчика 330. Схема 520 процессора далее скомпонована, чтобы сохранять в базе данных 350 измеренный зависимый от местоположения параметр в ассоциации с определенным направлением движения и определенной географической позицией транспортного средства.
В некоторых вариантах осуществления схема 520 процессора может также быть скомпонована, чтобы определять географическую позицию транспортного средства через блок 330 позиционирования. Кроме того, схема 520 процессора может быть скомпонована, чтобы определять направление движения транспортного средства в определенной географической позиции. Схема 520 процессора может также быть скомпонована, чтобы определять сохраненную позицию в базе данных 350, которая совпадает с определенной географической позицией транспортного средства. Схема 520 процессора может также быть скомпонована, чтобы прогнозировать маршрут движения на основании рассчитанной вероятности сохраненных направлений движения в определенной позиции. Схема 520 процессора может также быть скомпонована, чтобы извлекать информацию, содержащую сохраненный зависимый от местоположения параметр, ассоциированный с спрогнозированным маршрутом движения.
В некоторых вариантах осуществления схема 520 процессора может также быть скомпонована, чтобы увеличивать показания счетчика по направлению движения транспортного средства в определенной географической позиции. Кроме того, схема 520 процессора может также увеличивать показания счетчика по направлению движения транспортного средства до максимального значения; и когда максимальное значение для заданного направления движения достигается, схема 520 процессора может уменьшать показания счетчиков по другим направлениям движения транспортного средства в определенной географической позиции.
Схема 520 процессора может состоять, например, из одного или более из центрального процессора (CPU), микропроцессора или другого логического узла, сформированного, чтобы интерпретировать и исполнять инструкции и/или считывать и записывать данные. Схема 520 процессора может администрировать данные для притока, оттока или обработки данных, которая также включает в себя буферизацию данных, функции управления и т.п.
Блок 310 вычисления может также содержать приемник 510 сигнала, скомпонованный, чтобы принимать определение позиции для транспортного средства 100 от блока 330 позиционирования, содержащегося в транспортном средстве 100 согласно некоторым вариантам осуществления. Кроме того, приемник 510 сигнала может также быть скомпонован, чтобы принимать значения от других датчиков или счетчиков в ассоциации с транспортным средством 100, такими как измеритель возвышения, спидометр, термометр, часы и т.д. Такие данные измерения могут иметь отношение к, например, возвышению, уклону, сопротивлению качению дорожного покрытия, искривлению дороги, средней скорости, времени, дате, погоде, температуре, скорости, задействованной передаче, типу транспортного средства и/или весу транспортного средства. Кроме того, приемник 510 сигнала может также быть скомпонован, чтобы принимать данные от базы данных 350 согласно некоторым вариантам осуществления.
Согласно некоторым вариантам осуществления блок 310 вычисления может также содержать память 525, скомпонованную, чтобы хранить картографические данные, например, в форме рабочей карты 200. В некоторых вариантах осуществления рабочая карта 200 может быть основана на матрице, в которой каждый матричный элемент соответствует двумерной секции ландшафта. Кроме того, память 525 может также быть скомпонована, чтобы хранить измеренные связанные с местоположением данные, ассоциированные с позицией.
Блок 525 памяти может состоять, например, из карты памяти, флэш-памяти, памяти USB, жесткого диска или другого подобного энергонезависимого блока хранения данных постоянной природы, таких как любая группа, содержащая постоянное запоминающее устройство (ROM/ПЗУ), PROM (Программируемая ROM), стираемая программируемая постоянная память (Стираемая PROM), флэш-памяти, EEPROM (Электрически Стираемый PROM) и т.д. в различных вариантах осуществления.
Согласно некоторым вариантам осуществления блок 310 вычисления может также содержать схему 530 передачи, скомпонованную, чтобы посылать данные измерения или обнаруженные связанные с местоположением данные базе данных 350 по беспроводному или проводному интерфейсу. В некоторых вариантах осуществления схема 530 передачи может содержаться в блоке 310 вычисления так, чтобы они формировали единое целое. Кроме того, блок 310 вычисления может быть скомпонован, чтобы посылать данные на экран 320 отображения в некотором варианте осуществления.
Изобретение также содержит компьютерную программу для построения базы данных 350, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства 100 посредством выполнения способа 400 согласно по меньшей мере одному из ранее описанных этапов 401-404, при исполнении компьютерной программы в схеме 520 процессора в блоке 310 вычисления.
Способ 400 согласно этапам 401-404 для построения базы данных 350, для обеспечения прогнозирования маршрута движения может быть воплощен с помощью одной или более схем 520 процессора в блоке 310 вычисления вместе с кодом компьютерной программы в энергонезависимом носителе данных, чтобы выполнить любой, некоторый, определенный или все этапы 401-404 способа описанного выше. Компьютерная программа может, таким образом, содержать инструкции для выполнения этапов 401-404, когда компьютерная программа загружена в схему 520 процессора в блоке 310 вычисления.
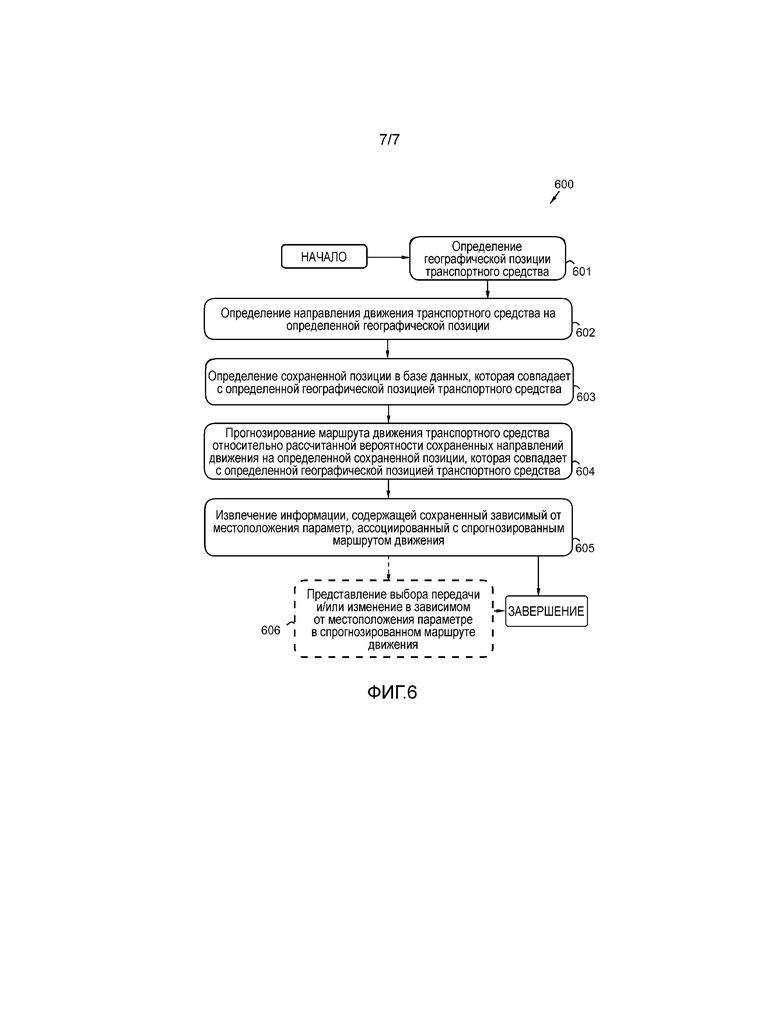
Фигура 6 иллюстрирует примерный вариант осуществления изобретения. Блок-схема на фигуре 6 поясняет способ 600 для прогнозирования маршрута движения для транспортного средства 100.
Чтобы быть в состоянии успешно прогнозировать маршрут движения, способ 600 может содержать несколько этапов 601-606. Однако, нужно отметить, что некоторые из этапов, описанные здесь, включаются только в некоторые альтернативные варианты осуществления изобретения, такие как этап 606. Кроме того, описанные этапы 601-606 могут быть выполнены в хронологическом порядке, несмотря на обозначения посредством порядковых номеров. Некоторые из описанных этапов 601-606 могут также выполняться параллельно друг с другом. Способ 600 содержит следующие этапы:
Этап 601
Географическая позиция транспортного средства определяется посредством блока 330 позиционирования.
Такое позиционирование, основанное на использовании спутника, может содержать или быть основанной на, например, GPS, Navstar, DGPS, Galileo, GLONASS или подобном. Однако, другие формы позиционирования могут входить в состав согласно некоторым вариантам осуществления; например, сам водитель определяет и отмечает свою текущую позицию, например, на экране отображения, клавиатуре или другом устройстве ввода для блока 330 позиционирования.
В некоторых вариантах осуществления, в которых представление ландшафта в базе данных 350 основано на матрице, может быть определена секция, в которой расположено транспортное средство 100.
Этап 602
Определяется направление движения транспортного средства в определенной географической позиции.
Это определение может включить в себя определение направления, откуда или от какой позиции транспортное средство 100 прибыло в свою текущую позицию.
Этап 603
Определяется сохраненная позиция в базе данных 350, которая совпадает с определенной 610 географической позицией транспортного средства.
Согласно некоторым вариантам осуществления, определение ландшафта в базе данных 350 может быть основано на матрице, в которой матричный элемент соответствует двумерной секции ландшафта.
Согласно некоторым вариантам осуществления, определение сохраненной позиции в базе данных 350 может включать в себя определение матричного элемента в базе данных 350, которому соответствует географическая позиция транспортного средства.
Этап 604
Маршрут движения для транспортного средства 100 прогнозируется на основании оцененной вероятности сохраненных направлений движения в определенной в 603 позиции.
Согласно некоторым вариантам осуществления прогнозирование маршрута движения может включать в себя определение наиболее вероятно обеспеченного направления движения к обеспеченной позиции, используя текущую позицию как входящее направление к обеспеченной позиции и следующее обеспеченной направление движения, и позицию.
Кроме того, прогнозирование маршрута движения для транспортного средства 100 может использоваться для выбора передачи в коробке передач в транспортном средстве и/или как основание для решения по управлению посредством вовлечения другой функции в транспортном средстве 100.
Этап 605
Извлекается информация, содержащая сохраненный зависимый от местоположения параметр, ассоциированный с спрогнозированным 604 маршрутом движения.
Извлеченная информация может содержать сохраненный зависимый от местоположения параметр, такой как связанный с возвышением параметр, такой как возвышение и/или уклон, сохраненное рассчитанное сопротивление качению, сопротивление качению дорожного покрытия, искривление земли, средняя скорость движения, время, дата, погода, температура, тип транспортного средства и/или вес транспортного средства, ассоциированный с спрогнозированным 604 маршрутом движения.
В некоторых вариантах осуществления извлечение информации может быть сделано из статистической таблицы для различных диапазонов веса транспортного средства, например 0-10 тонн, 10-20 тонн, 20-30 тонн и 30-40 тонн, которые соответствуют диапазону веса транспортного средства для транспортного средства.
Этап 606
Данный этап способа включен в некоторые, но не все варианты осуществления. Может быть представлен выбор передачи и/или изменение в зависимом от местоположения параметре в результате спрогнозированного 604 маршрута движения.
Например, этот выбор передачи, изменение в зависимом от местоположения параметре, таком как возвышение, уклон дороги или подобное и/или спрогнозированный 604 маршрут движения, могут быть полностью или частично представлены на экране 320 отображения или подобном. Представление может также или альтернативно быть достигнуто посредством аудио сигналов, голосовых сообщений, диодов, осязательных сигналов, которые уведомляют водителя или подобное.
Изобретение также содержит компьютерную программу для прогнозирования маршрута движения для транспортного средства 100 посредством выполнения способа 600 согласно по меньшей мере одному из ранее описанных этапов 601-606, когда компьютерная программа исполняется в схеме 520 процессора, в блоке 310 вычисления.
Способ 600 согласно этапам 601-606 для прогнозирования маршрута движения для транспортного средства 100 может быть воплощен с помощью одной или более схем 520 процессора в блоке 310 вычисления вместе с кодом компьютерной программы в энергонезависимом носителе информации, чтобы выполнять любой, некоторый, определенный или все этапы способа 601-606 описанного выше. Компьютерная программа может, таким образом, содержать инструкции для выполнения этапов 601-606, когда компьютерная программа загружена в схему 520 процессора, в блоке 310 вычисления.
Некоторые варианты осуществления также содержат систему 300 для построения базы данных 350, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства 100. Упомянутая система 300 содержит базу данных 350, блок 330 позиционирования в транспортном средстве 100, датчик 330 для того, чтобы измерять по меньшей мере один зависимый от местоположения параметр и блок 310 вычисления.
Некоторые варианты осуществления изобретения также содержат транспортное средство 100, которое содержит систему 500 для построения базы данных 350, чтобы сделать возможным прогнозирование маршрута движения для транспортного средства 100 и/или прогнозирование маршрута движения для транспортного средства 100.
Изобретение относится к области навигационного приборостроения и может найти применение в системах навигации транспортных средств. Технический результат – расширение функциональных возможностей. Для этого используют блок (310) вычисления для построения базы данных (350), чтобы обеспечить возможность прогнозирования маршрута движения для транспортного средства (100). При этом обеспечивают: определение (401) географической позиции транспортного средства посредством блока (330) позиционирования; определение (402) направления движения транспортного средства в определенной (401) географической позиции; измерение (403) по меньшей мере одного зависимого от местоположения параметра в определенной (401) географической позиции; и сохранение (404) в базе данных (350) измеренного (403) зависимого от местоположения параметра в ассоциации с определенным (402) направлением движения транспортного средства и определенной (401) географической позицией транспортного средства. 8 н. и 11 з.п. ф-лы, 6 ил.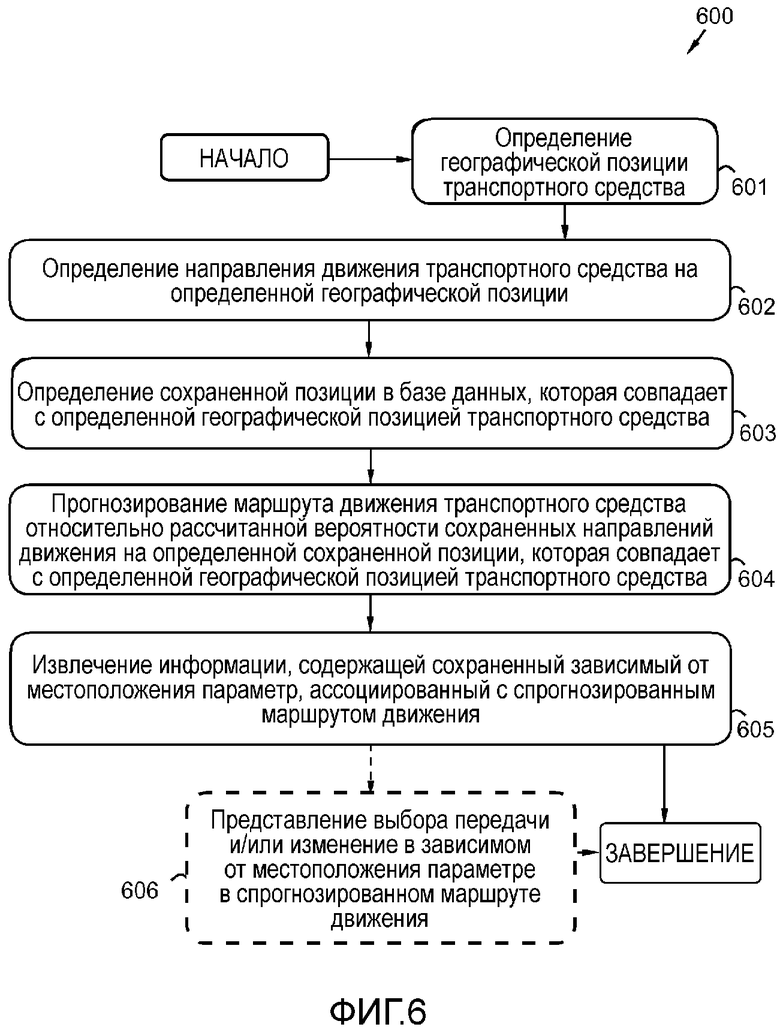
1. Способ (400) для построения базы данных (350), чтобы сделать возможным прогнозирование маршрута движения для транспортного средства (100), причем способ (400) отличается тем, что содержит:
определение (401) географической позиции транспортного средства посредством блока (330) позиционирования;
определение (402) направления транспортного средства, движущегося в определенной (401) географической позиции;
измерение (403) по меньшей мере одного зависимого от местоположения параметра в определенной (401) географической позиции; и
сохранение (404) в базе данных (350) измеренного (403) зависимого от местоположения параметра в ассоциации с определенным (402) направлением движения и определенной (401) географической позицией транспортного средства,
причем сохранение (404) измеренного (403) зависимого от местоположения параметра также включает в себя создание различных статистических таблиц для различных диапазонов веса транспортного средства, например 0-10 тонн, 10-20 тонн, 20-30 тонн и 30-40 тонн, и сохранение (404) в статистической таблице соответствия диапазону веса транспортного средства для транспортного средства.
2. Способ (400) по п. 1, в котором определение (402) направления движения транспортного средства осуществляется посредством определения направления, откуда транспортное средство (100) прибывает в географическую позицию, и направления, куда транспортное средство (100) отправляется из географической позиции.
3. Способ (400) по п. 1 или 2, в котором определение (402) направления движения транспортного средства осуществляется посредством определения географической позиции, откуда транспортное средство (100) прибывает в географическую позицию, и географической позиции, куда транспортное средство (100) отправляется из географической позиции.
4. Способ (400) согласно любому из пп. 1-3, в котором зависимый от местоположения параметр содержит возвышение, уклон, сопротивление качению дорожному покрытию, искривление земли, среднюю скорость движения, время, дату, погоду, температуру, тип транспортного средства и/или вес транспортного средства.
5. Способ (400) согласно любому из пп. 1-4, в котором представление ландшафта в базе данных (350) основано на матрице, и при этом каждый матричный элемент соответствует двумерной секции ландшафта, и при этом определение (401) географической позиции транспортного средства включает в себя определение секции, в которой расположено транспортное средство (100).
6. Способ (400) согласно п. 1, в котором сохранение (404) также включает в себя увеличение показаний счетчика по направлению движения транспортного средства в определенной (401) географической позиции.
7. Способ (400) по п. 6, в котором счетчик для направления движения транспортного средства увеличивает показания до максимального значения; и когда максимальное значение для заданного направления движения достигается, то счетчики для других направлений движения в определенной (401) географической позиции уменьшают показания.
8. Блок (310) вычисления для построения базы данных (350), чтобы разрешить прогнозирование маршрута движения для транспортного средства (100), причем блок (310) вычисления отличается тем, что содержит:
схему (520) процессора, скомпонованную, чтобы определять географическую позицию транспортного средства с помощью блока (330) позиционирования; и также скомпонованную, чтобы определять направление движения транспортного средства в определенной географической позиции; и также скомпонованную, чтобы измерять по меньшей мере один зависимый от местоположения параметр в определенной географической позиции посредством датчика (330); и дополнительно скомпонованную, чтобы сохранять в базе данных (350) измеренный зависимый от местоположения параметр в ассоциации с определенным направлением движения и определенной географической позицией транспортного средства,
причем сохранение (404) измеренного (403) зависимого от местоположения параметра также включает в себя создание различных статистических таблиц для различных диапазонов веса транспортного средства, например 0-10 тонн, 10-20 тонн, 20-30 тонн и 30-40 тонн, и сохранение (404) в статистической таблице соответствия диапазону веса транспортного средства для транспортного средства.
9. Энергонезависимый носитель данных, имеющий компьютерную программу для построения базы данных (350), чтобы сделать возможным прогнозирование маршрута движения для транспортного средства (100) посредством выполнения способа (400) согласно любому из пп. 1-7, когда компьютерная программа исполняется в схеме (520) процессора в блоке (310) вычисления согласно п. 8.
10. Способ (600) для прогнозирования маршрута движения для транспортного средства (100), причем способ (600) отличается тем, что содержит:
определение (601) географической позиции транспортного средства посредством блока (330) позиционирования;
определение (602) направления движения транспортного средства в определенной (601) географической позиции;
определение (603) сохраненной позиции в базе данных (350), причем сохраненная позиция соответствует определенной (601) географической позиции транспортного средства;
прогнозирование (604) маршрута движения на основании оцененной вероятности сохраненных направлений движения в определенной (603) позиции; и
извлечение (605) информации, содержащей сохраненный зависимый от местоположения параметр, ассоциированный с спрогнозированным (604) маршрутом движения,
причем извлечение (605) информации осуществляется из статистической таблицы для различных диапазонов веса транспортного средства, например 0-10 тонн, 10-20 тонн, 20-30 тонн и 30-40 тонн, которая соответствует диапазону веса транспортного средства для транспортного средства, и при этом прогнозирование (604) маршрута движения основано на упомянутой статистической таблице.
11. Способ (600) по п. 10, в котором извлечение (605) информации, содержащей сохраненный зависимый от местоположения параметр, включает в себя связанный с возвышением параметр, такой как возвышение и/или уклон, сохраненное рассчитанное сопротивление качению, сопротивление качению дорожного покрытия, искривление земли, среднюю скорость движения, время, дату, погоду, температуру, тип транспортного средства и/или вес транспортного средства, ассоциированный с спрогнозированным (604) маршрутом движения.
12. Способ (600) согласно п. 10, в котором представление ландшафта в базе данных (350) основано на матрице, и при этом каждый матричный элемент соответствует двумерной секции ландшафта, и при этом определение (603) сохраненной позиции в базе данных (350) содержит определение матричного элемента в базе данных (350), которому соответствует географическая позиция транспортного средства.
13. Способ (600) согласно любому из пп. 10-12, в котором прогнозирование (604) маршрута движения содержит определение наиболее вероятного полученного направления движения по отношению к полученной позиции, используя текущую позицию как входящее направление к полученной позиции и следующее полученное направление движения, и позицию.
14. Способ (600) согласно любому из пп. 10-12, в котором прогнозирование (604) маршрута движения транспортного средства (100) используется для выбора параметра настройки передачи коробки передач в транспортном средстве (100) и/или как основание для принятия решения по управлению посредством вовлечения другой функции в транспортном средстве (100).
15. Способ (600) согласно п. 14, дополнительно содержащий:
представление (606) выбора передачи и/или изменения в зависимом от местоположения параметре в результате спрогнозированного (604) маршрута движения.
16. Блок (310) вычисления для прогнозирования маршрута движения для транспортного средства (100), причем блок (310) вычисления отличается тем, что содержит:
схему (520) процессора, скомпонованную, чтобы определять географическую позицию транспортного средства через блок (330) позиционирования; и также скомпонованную, чтобы определять направление движения транспортного средства в определенной географической позиции; и скомпонованную, чтобы определять сохраненную позицию в базе данных (350), которая соответствует определенной географической позиции транспортного средства; и также скомпонованную, чтобы прогнозировать маршрут движения на основании оцененной вероятности сохраненных направлений движения в определенной позиции; и также скомпонованную, чтобы извлекать информацию, содержащую сохраненный зависимый от местоположения параметр, ассоциированный с спрогнозированным маршрутом движения,
причем извлечение (605) информации осуществляется из статистической таблицы для различных диапазонов веса транспортного средства, например 0-10 тонн, 10-20 тонн, 20-30 тонн и 30-40 тонн, которая соответствует диапазону веса транспортного средства для транспортного средства, и при этом прогнозирование (604) маршрута движения основано на упомянутой статистической таблице.
17. Энергонезависимый носитель данных, имеющий компьютерную программу для прогнозирования маршрута движения для транспортного средства (100) посредством выполнения способа (600) согласно любому из пп. 10-15, когда компьютерная программа исполнена в схеме (520) процессора, в блоке (310) вычисления согласно п. 8.
18. Система (300) для построения базы данных (350), чтобы сделать возможным прогнозирование маршрута движения для транспортного средства (100), содержащая:
базу данных (350);
блок (330) позиционирования в транспортном средстве (100);
датчик (330) для того, чтобы измерять по меньшей мере один зависимый от местоположения параметр;
блок (310) вычисления согласно любому из пп. 8 и 16.
19. Транспортное средство (100), содержащее систему (300) согласно п. 18.
| FR 2881545 A3, 04.08.2006 | |||
| US 20130131974 А1, 23.05.2013 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 2003210806 A1, 13.11.2003 | |||
| US 5982298 A, 09.11.1999 | |||
| WO 2004003788 A2, 08.01.2004 | |||
| Интеллектуальная система сбора и обработки данных в интерактивных системах программного управления, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| - М.: СОЛОН-ПРЕСС, 2014. | |||

