Область техники, к которой относится изобретение
Настоящее изобретение относится к системе для управления транспортным средством, в частности, к транспортному средству, оборудованному системой, позволяющей регулировать подвеску транспортного средства на основании данных о предшествующих поездках по тому же маршруту.
Уровень техники
Водители часто ездят в одни и те же места по одному или подобному маршруту. В частности, водители обычно ездят по одному маршруту из дома на работу и со временем учатся прогнозировать возникновение некоторых нежелательных ситуаций. Например, водители запоминают, где интенсивность движения (трафик) обычно самая высокая, какие полосы можно использовать для объезда в час пик, где есть выбоины, где изменяется ограничение скорости, где скапливается вода во время грозы, и т.д. Зная все это, водители могут вырабатывать собственные привычки для прогнозирования различных проблем, которые могут возникать в наиболее проблематичных местах.
Раскрытие изобретения
Предложено транспортное средство, включающее в себя:
датчик, выполненный с возможностью обнаруживать первую особенность поверхности дороги;
регулируемую систему подвески и
устройство обработки, выполненное с возможностью определять местоположение на основании первой особенности поверхности дороги и применять профиль подвески в системе подвески, причем этот профиль подвески ассоциирован со второй особенностью поверхности дороги.
Применение профиля подвески может включать в себя применение первого коэффициента затухания в системе подвески в местоположении первой особенности поверхности дороги и второго коэффициента затухания в местоположении второй особенности поверхности дороги.
Первый коэффициент затухания может быть основан на характеристике первой особенности поверхности дороги, а второй коэффициент затухания может быть основан на характеристике второй особенности поверхности дороги.
Характеристика может представлять собой неровность дороги.
Применение профиля подвески может включать в себя применение третьего коэффициента затухания в системе подвески в местоположении третьей особенности поверхности дороги.
Устройство обработки может быть выполнено с возможностью определять местоположения первой особенности поверхности дороги и второй особенности поверхности дороги по карте истории поездок.
Карта истории поездок может включать в себя несколько особенностей поверхности дороги на маршруте, причем особенности поверхности дороги могут обнаруживаться с помощью датчика во время предыдущих поездок по этому маршруту.
Устройство обработки может быть выполнено с возможностью определять расстояние между первой особенностью поверхности дороги и второй особенностью поверхности дороги на основании карты истории поездок.
Устройство обработки может быть выполнено с возможностью применять профиль подвески до того, как транспортное средство достигнет второй особенности поверхности дороги.
Устройство обработки может быть выполнено с возможностью применять профиль подвески до того, как транспортное средство достигнет первой особенности поверхности дороги.
Предложена система для работы транспортного средства, включающая в себя устройство обработки, выполненное с возможностью определять местоположение на основании обнаруженной датчиком первой особенности поверхности дороги и применять профиль подвески в системе подвески транспортного средства, причем этот профиль подвески ассоциирован со второй особенностью поверхности дороги.
Устройство обработки может быть выполнено с возможностью определять расстояние между первой особенностью поверхности дороги и второй особенностью поверхности дороги.
Предложен способ работы транспортного средства, в котором:
генерируют карту истории поездок, которая идентифицирует несколько особенностей поверхности дороги, включая первую особенность поверхности дороги и вторую особенность поверхности дороги, на маршруте;
обнаруживают первую особенность поверхности дороги;
определяют местоположение транспортного средства на основании первой особенности поверхности дороги;
определяют местоположение второй особенности поверхности дороги по карте истории поездок;
применяют профиль подвески в системе подвески транспортного средства, причем этот профиль подвески ассоциирован со второй особенностью поверхности дороги.
Местоположение второй особенности поверхности дороги могут определять на основании расстояния между первой особенностью поверхности дороги и второй особенностью поверхности дороги.
Краткое описание чертежей
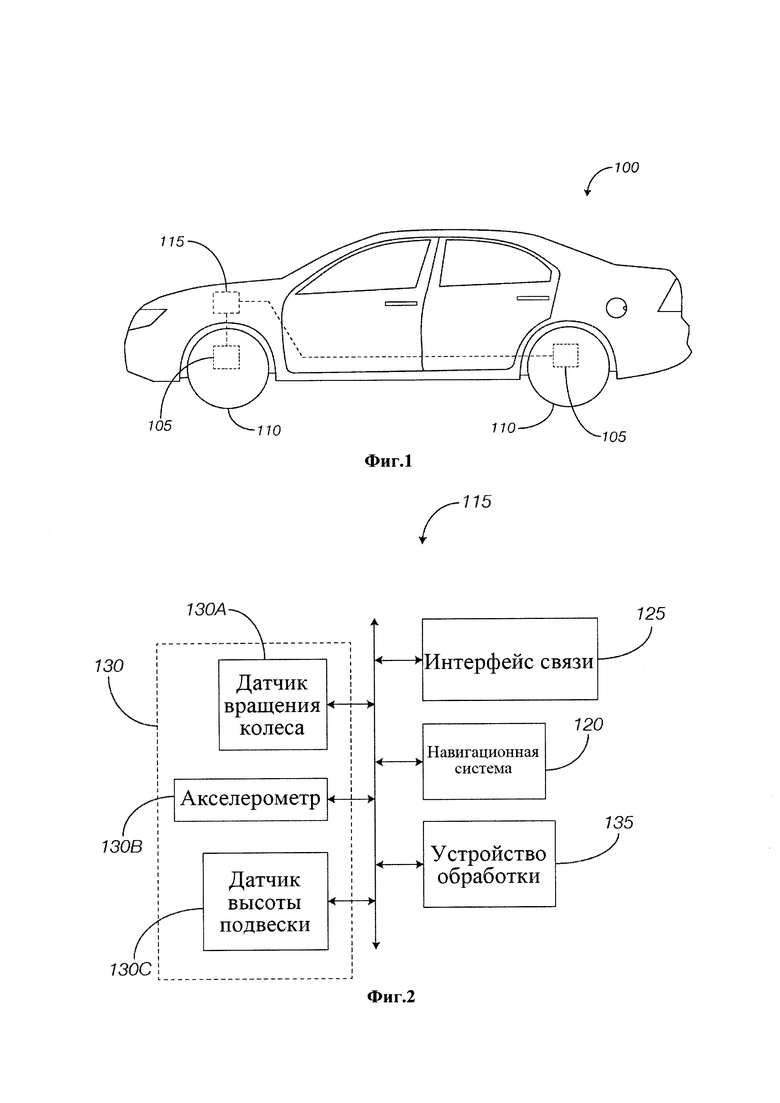
На фиг. 1 представлен пример транспортного средства, выполненного с возможностью прогнозировать различные дорожные условия.
На фиг. 2 представлена схема примера системы транспортного средства, которую можно использовать в транспортном средстве с фиг. 1.
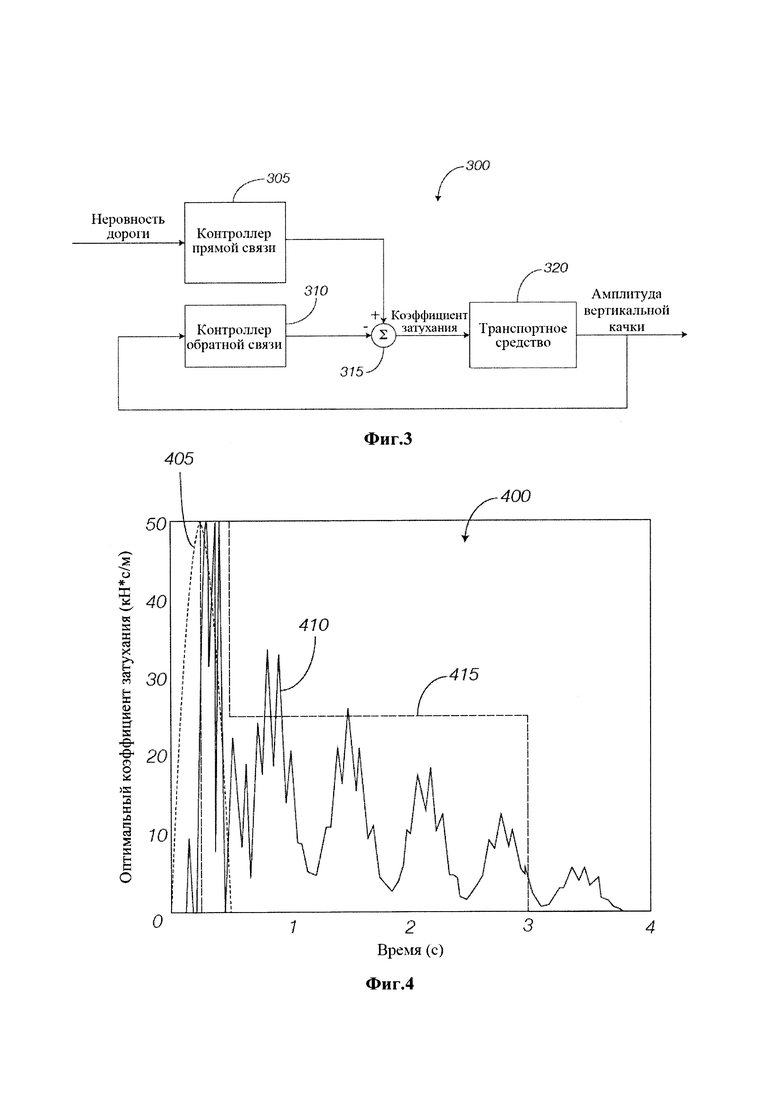
На фиг. 3 представлена принципиальная схема управления, на которой изображен принцип изменения транспортным средством коэффициента затухания в соответствии с обнаруженной особенностью поверхности дороги.
На фиг. 4 представлен график, на котором показан пример изменения коэффициента затухания, применяемого в системе подвески, когда транспортное средство сталкивается с особенностью поверхности дороги.
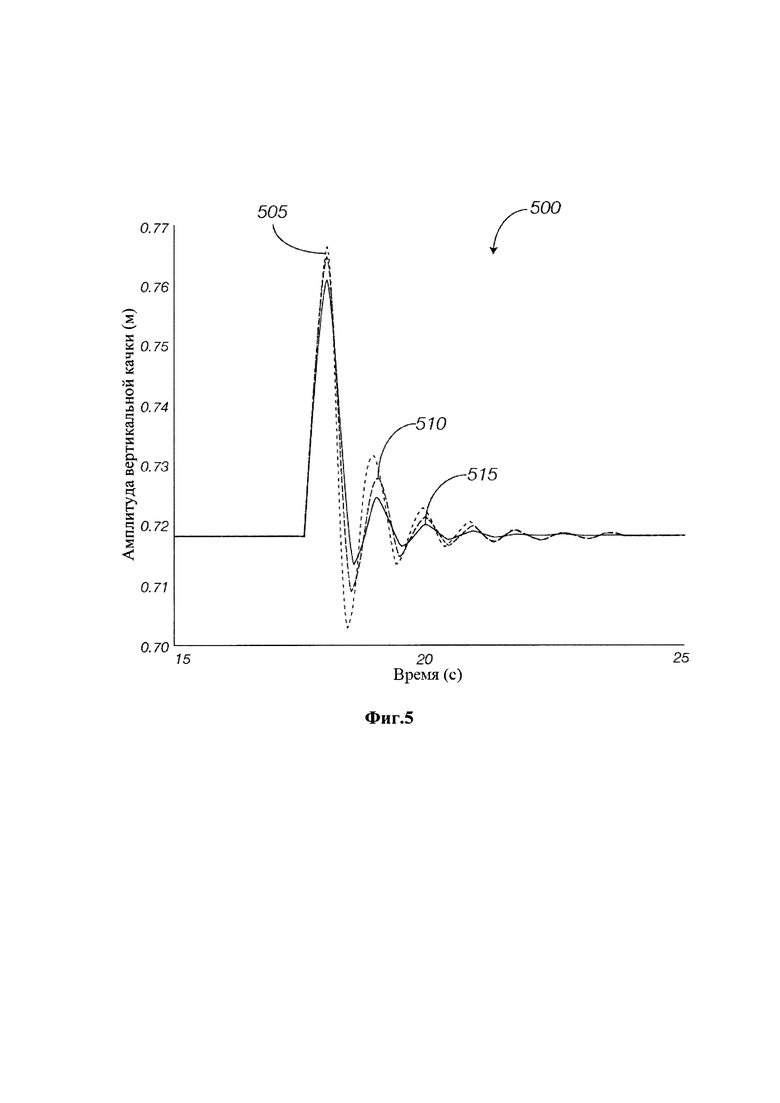
На фиг. 5 представлен график, на котором показаны значения амплитуды вертикальной качки при различных сценариях.
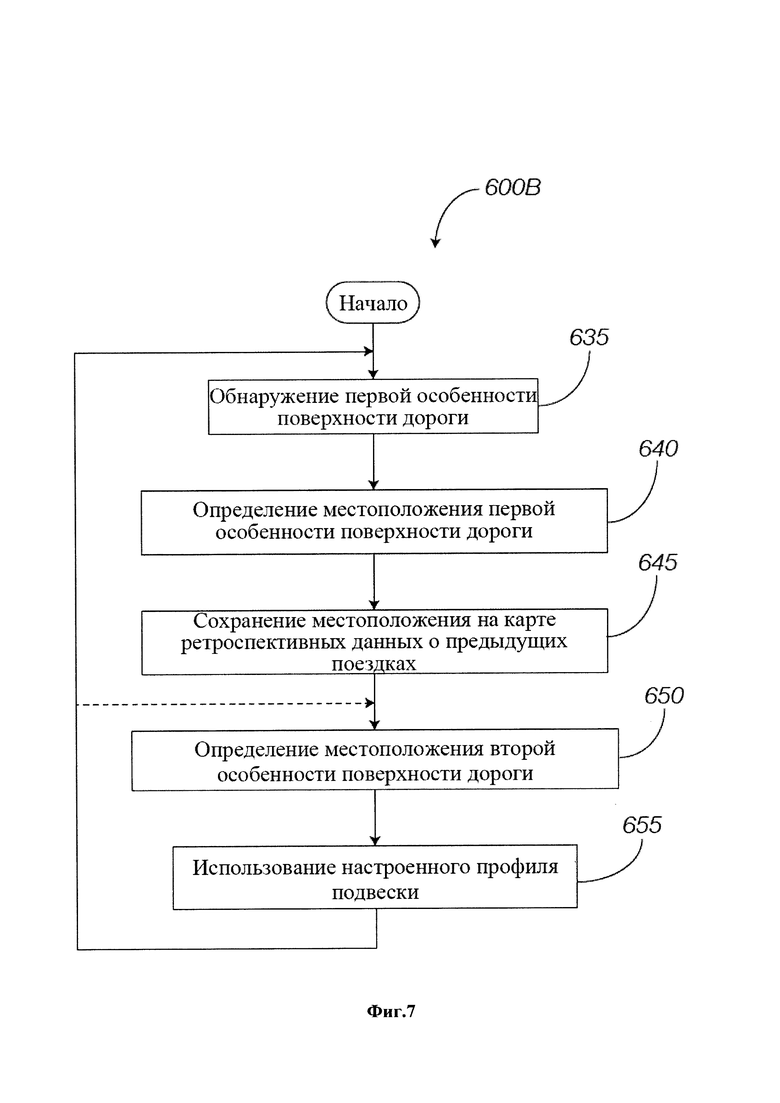
На фиг. 6 и 7 представлены блок-схемы примеров способов, которые могут быть использованы системой транспортного средства с фиг. 2.
Осуществление изобретения
В соответствии с примером транспортное средство выполнено с возможностью прогнозирования различных дорожных условий с помощью карты данных о предыдущих поездках (карты истории поездок) и повышения качества езды за счет регулирования работы системы подвески транспортного средства. Транспортное средство включает в себя датчик и устройство обработки. Датчик выполнен с возможностью обнаруживать особенности поверхности дороги, имеющей характеристику достаточно заметных неровностей. К особенностям поверхности дороги можно отнести выбоины, искусственные неровности для ограничения скорости движения транспорта, трещины в дорожном покрытии, деформационные швы и т.д. Во время первой поездки особенности поверхности дороги регистрируются и генерируется карта истории поездок, которая будет использоваться при последующих поездках. Во время второй и последующих поездок устройство обработки определяет местоположение транспортного средства на основании обнаруженной особенности поверхности дороги и применяет соответствующий профиль подвески в системе подвески. Профиль подвески соотносится с обнаруженной особенностью поверхности дороги или по крайней мере одной последующей особенностью поверхности дороги. Другими словами, профиль подвески может быть использован для регулировки работы системы подвески с учетом неровности в месте обнаружения особенности поверхности дороги и/или по крайней мере одной последующей особенности поверхности дороги.
Изображенные элементы могут принимать различные формы и включать в себя дополнительные и (или) альтернативные компоненты и системы. Изображенные компоненты не должны рассматриваться как ограничения. На практике могут быть использованы дополнительные или альтернативные компоненты и (или) варианты применения.
Как на фиг. 1 показано, транспортное средство 100 включает в себя систему 105 подвески, функционально соединенную с колесами 110, и систему 115 управления подвеской, которая может быть использована для управления работой системы 105 подвески при прогнозировании различных особенностей поверхности дороги. К особенностям поверхности дороги можно отнести выбоины, искусственные неровности для ограничения скорости движения транспорта, трещины в дорожном покрытии, деформационные швы и т.д. В соответствии с подробным описанием, приведенным ниже, система 115 управления подвеской может быть выполнена с возможностью использовать одну особенность поверхности дороги для определения местоположения транспортного средства 100. После генерирования дорожной карты во время первой поездки, которая будет использоваться во время последующих поездок, как только местоположение определено, соответствующий профиль подвески может быть применен для последующих особенностей поверхности дороги. В соответствии с некоторыми возможными вариантами применения может использоваться профиль подвески, соответствующий первой обнаруженной особенности поверхности дороги. Хотя в качестве примера представлен седан, транспортное средство 100 может представлять собой любое пассажирское или коммерческое транспортное средство, например, легковой автомобиль, грузовой автомобиль, внедорожник, такси, автобус и т.д. При некоторых возможных подходах, рассмотренных ниже, транспортное средство 100 представляет собой автономное транспортное средство, выполненное с возможностью работать в автономном режиме (например, без участия работы), в частично автономном режиме и (или) в неавтономном режиме.
На фиг. 2 представлена система 115 управления подвеской, которая может включать в себя навигационную систему 120, интерфейс 125 связи, по крайней мере один датчик 130 и устройство 135 обработки.
Навигационная система 120 может быть выполнена с возможностью определять положение транспортного средства 100, в том числе текущее местоположение транспортного средства 100. Навигационная система 120 может включать в себя приемник системы глобального позиционирования (GPS), выполненный с возможностью определять местоположение транспортного средства 100 методом триангуляции относительно спутников или наземных ретрансляционных вышек. Таким образом, навигационная система 120 может быть выполнена с возможностью беспроводного обмена данными. Навигационная система 120 также может быть выполнена с возможностью строить маршруты из текущего местоположения в выбранный пункт назначения, а также отображать карту и указывать направления движения в сторону выбранного пункта назначения, например, с помощью интерфейса пользователя. В соответствии с некоторыми примерами навигационная система 120 может строить маршрут в соответствии с предпочтениями пользователя. К предпочтениям пользователя можно отнести максимизацию эффективности использования топлива, сокращение времени в пути, уменьшение преодолеваемого расстояния и т.д.
Интерфейс 125 связи может быть выполнен с возможностью обеспечивать проводное соединение и/или беспроводное соединение между компонентами транспортного средства 100 и другими устройствами, в том числе удаленным сервером или даже другим транспортным средством в соответствии с протоколом связи между транспортными средствами. В качестве примера протокола связи между транспортными средствами можно указать протокол специализированной связи ближнего действия (DSRC). Соответственно, интерфейс 125 связи может быть выполнен с возможностью принимать сообщения и (или) передавать сообщения на удаленный сервер и (или) другое транспортное средство.
Датчик 130 может быть выполнен с возможностью обнаруживать особенности поверхности дороги. Как было сказано выше, к особенностям поверхности дороги можно отнести выбоины, искусственные неровности для ограничения скорости движения транспорта, трещины в дорожном покрытии, деформационные швы и любые другие особенности поверхности, приводящие к возникновению вертикального перемещения одного или нескольких колес 110. В дополнение к измерению вертикального перемещения датчик 130 может выполнять измерения размера особенности поверхности дороги. Соответственно, датчик 130 может включать в себя датчик 130A скорости вращения колеса и/или акселерометр 130В, и/или датчик 130С высоты подвески. Датчик 130А скорости вращения колеса может быть выполнен с возможностью измерять скорость вращения колеса и выдавать сигнал, соответствующий измеренной скорости вращения колеса. Расстояние, пройденное транспортным средством 100, может быть вычислено на основании выходного сигнала датчика 130, т.е. датчика 130А скорости вращения колеса, и размера колеса. Таким образом, датчик 130А скорости вращения колес может быть использован для измерения длины особенности поверхности дороги, а также расстояния между особенностями поверхности дороги. Датчик 130А скорости вращения колеса может быть установлен на любом количестве колес 110, в том числе на колесах, не являющихся ведущими (например, на задних колесах транспортного средства 100 с передним приводом). Изменения измеренной скорости вращения колеса, в частности, скорости вращения колеса, не являющегося ведущим, могут быть использованы для определения высоты неровностей дороги. Акселерометр 130В может быть использован для измерения вертикального ускорения транспортного средства 100, вызванного наличием особенности поверхности дороги. В соответствии с одним примером неровность дорожного покрытия может быть вычислена с помощью функции спектральной плотности мощности для поверхности дороги, при этом акселерометр 130В может быть выполнен с возможностью измерять спектральную плотность мощности. Применяя преобразование Фурье к показаниям акселерометра 130В, выдаваемым в течение некоторого интервала времени, можно получить кривую спектральной плотности мощности, которая является индикатором неровности дороги. Более того, при определении неровности дороги спектральная плотность мощности может нормироваться к относительному значению вместо абсолютного значения. Датчик 130С высоты подвески может быть спользован для измерения вертикального перемещения одного или нескольких колес 110, вызванного наличием особенности поверхности дороги. Каждый датчик 130 может быть выполнен с возможностью выдавать сигналы, соответствующие их результатам измерений, которые могут указывать на обнаружение одной или нескольких особенностей поверхности дороги.
Устройство 135 обработки может быть выполнено с возможностью определять местоположение транспортного средства 100 на основании одной или нескольких обнаруженных особенностей поверхности дороги. Устройство 135 обработки может получить доступ к карте истории поездок, которая идентифицирует местоположения известных особенностей поверхности дороги, и сравнить характеристики особенностей поверхности дороги, соответствующие сигналам, принятым от одного или нескольких датчиков 130, с характеристиками особенностей поверхности дороги, идентифицированных на карте истории поездок. Карта истории поездок может быть создана во время предыдущих поездок по определенному маршруту. В соответствии с одним примером устройство 135 обработки может принимать от одного или нескольких датчиков 130 сигналы, указывающие на наличие неровности на дороге. Неровность может быть зарегистрирована как особенность поверхности дороги на карте истории поездок. Для определения местоположения особенности поверхности дороги устройство 135 обработки может использовать информацию о местоположении, выданную навигационной системой 120. Во время последующих поездок по тому же маршруту устройство 135 обработки может обращаться к карте истории поездок для определения местоположения особенности поверхности дороги, а в некоторых случаях использовать информацию о местоположении особенности поверхности дороги для проверки или подтверждения местоположения транспортного средства 100. Другими словами, устройство 135 обработки может быть выполнено с возможностью использовать обнаруженную особенность поверхности дороги в качестве более точного указателя местоположения транспортного средства 100. После обнаружения особенности поверхности дороги устройство 135 обработки может определить, что транспортное средство 100 находится в месте, ассоциированном с особенностью поверхности дороги на карте истории поездок. Расстояния между особенностями поверхности дороги, зарегистрированными на карте истории поездок, могут быть рассчитаны с помощью датчика 130А скорости вращения колес, чтобы обеспечить большую точность по сравнению с использованием только навигационной системы 120.
После обнаружения особенности поверхности дороги и определения ее местоположения устройство 135 обработки может применить заранее заданный профиль в системе 105 подвески. Каждый заранее заданный профиль может быть ассоциирован с определенной особенностью поверхности дороги или типом особенностей поверхности дороги. Таким образом, функционирование системы 105 подвески в соответствии с заранее заданным профилем может обеспечить более плавное движение, по крайней мере, при контакте с некоторыми известными особенностями поверхности дороги. В соответствии с одним примером устройство 135 обработки может применить в системе 105 подвески первый коэффициент затухания в местоположении первой особенности поверхности дороги, второй коэффициент затухания в местоположении второй особенности поверхности дороги, третий коэффициент затухания в местоположении третьей особенности поверхности дороги, и т.д. Каждый коэффициент затухания может быть основан на характеристике определенной особенности поверхности дороги, при контакте с которой он будет использоваться. В качестве примера характеристики можно указать неровность дорожного покрытия. Таким образом, используемый коэффициент затухания может соответствовать неровности дорожного покрытия.
Устройство 135 обработки может определять расстояние между двумя особенностями поверхности дороги и применять соответствующие коэффициенты затухания. Коэффициент затухания, применяемый в системе 105 подвески, может быть изменен до того, как транспортное средство 100 доедет до следующей особенности поверхности дороги. Расстояние может быть определено по карте истории поездок или вычислено на основании одного или нескольких сигналов, принятых от датчиков 130. Например, устройство 135 обработки может определить, что транспортное средство 100 приближается к следующей особенности поверхности дороги на основании данных о местоположении, полученных от навигационной системы 120, количества оборотов колеса, определенного с помощью одного или нескольких датчиков 130, или любого сочетания этих или других данных. В соответствии с некоторыми возможными подходами устройство 135 обработки может определять местоположение транспортного средства 100 на основании первой обнаруженной особенности поверхности дороги и применить соответствующие коэффициенты затухания в профиле подвески для последующих встреченных особенностей поверхности дороги. Однако в соответствии с другими вариантами применения устройство 135 обработки может стремиться применять настроенный коэффициент затухания для каждой особенности поверхности дороги, с которой происходит контакт.
Вместо использования необработанных данных о каждой особенности поверхности дороги или даже нормализованного значения спектральной плотности мощности устройство 135 обработки может присваивать класс каждой особенности поверхности дороги на основании измеренной неровности, при этом каждый класс может быть ассоциирован с соответствующим коэффициентом затухания. Например, гладкая поверхность может быть отнесена к классу низкой неровности, средняя выбоина может быть отнесена к классу средней неровности, а глубокая выбоина или искусственная неровность для ограничения скорости движения может быть отнесена к классу высокой неровности. Таким образом, в качестве дополнения или альтернативы необработанным данным от датчиков, касающимся каждой особенности поверхности дороги, на карте истории поездок могут быть сохранены данные о присвоенном классе. При приближении транспортного средства 100 к области неровности определенного класса система 105 подвески может начать работу в соответствии с данным классом. Другими словами, устройство 135 обработки может применять подходящий для этого класса профиль подвески (например, коэффициент затухания).
На фиг. 3 представлена принципиальная схема 300 управления, которая может быть использована для регулировки коэффициента затухания, установленного для определенной особенности поверхности дороги с определенной характеристикой, как было описано выше. Принципиальная схема 300 управления включает в себя контроллер 305 обратной связи, контроллер 310 прямой связи и блок 315 суммирования. Смещение транспортного средства определяется блоком 320 транспортного средства. При приближении транспортного средства 100 к определенной особенности поверхности дороги контроллер 310 прямой связи может выдать определенное значение, соответствующее данной особенности поверхности дороги. Значение может быть определено по карте истории поездок. Карта истории поездок может ассоциировать особенность поверхности дороги, к которой приближается транспортное средство, с определенным классом, таким как класс высокой неровности, класс низкой неровности или класс средней неровности. Выходное значение контроллера 310 прямой связи может быть заранее задано на основании данных об особенности поверхности дороги, сохраненных на карте истории поездок. Значение амплитуды вертикальной качки, испытываемой транспортным средством 100, может быть выдано блоком 320 транспортного средства. Значение амплитуды вертикальной качки также может быть передано на контроллер 305 обратной связи. Блок 315 суммирования может вычесть выходной сигнал контроллера 305 обратной связи из выходного сигнала контроллера 310 прямой связи. Выходной сигнал блока 315 суммирования может представлять собой коэффициент затухания.
В соответствии с принципиальной схемой 300 управления с фиг. 3 устройство 135 обработки может стремиться свести к минимуму амплитуду вертикальной качки с помощью подбора оптимального коэффициента затухания.
Ниже приведено уравнение 1 для критерия оптимальности:

где zs - амплитуда вертикальной качки транспортного средства 100, i - момент времени, в который транспортное средство 100 проезжает по особенности поверхности дороги, а N - общее количество измеренных временных тактов с момента первого контакта транспортного средства 100 с особенностью поверхности дороги до прекращения колебаний. Значение амплитуды вертикальной качки zs представляет собой функцию коэффициента затухания, когда высота неровности дороги известна.
На фиг. 4 представлен график 400, на котором показан пример изменения значений коэффициента затухания, применяемых в системе 105 подвески при контакте транспортного средства 100 с особенностью поверхности дороги. Вдоль оси X указаны значения времени, а вдоль оси Y указаны значения коэффициента затухания. Неровность дороги обозначена линией 405. Вычисленный коэффициент затухания обозначен линией 410, а упрощенный коэффициент затухания - линией 415. Таким образом, в начале контакта транспортного средства 100 с особенностью поверхности дороги может быть применен высокий коэффициент затухания (например, в пределах 0,25 секунд после контакта с особенностью поверхности дороги). При уменьшении амплитуды вертикальных колебаний транспортного средства 100 коэффициент затухания также может быть уменьшен. Как показано на графике 400, коэффициент затухания может быть уменьшен примерно на 50% примерно через 0,5 секунды после первого контакта с особенностью поверхности дороги. Как показано на графике 400, сниженный коэффициент затухания может использоваться в течение заранее заданного времени, например, в течение 3 секунд.
Прогнозирование неровности дорожного покрытия и применение коэффициента затухания может снизить амплитуду вертикальной качки транспортного средства 100, как показано на фиг. 5. На графике 500 с фиг. 5 показана первая линия 505, которой обозначена амплитуда вертикальной качки, испытываемой транспортным средством 100 без использования ретроспективных данных (т.е. без прогнозирования особенностей поверхности дороги) или без контроллера обратной связи, изображенного на фиг. 3. Второй линией 510 обозначена амплитуда вертикальной качки с обратной связью, но без использования ретроспективных данных. Третьей линией 515 обозначена амплитуда вертикальной качки с использованием ретроспективных данных и обратной связи в соответствии с принципиальной схемой 300 управления с фиг. 3. Третья линия 515 показывает, что использование ретроспективных данных и обратной связи позволяет уменьшить максимальную величину амплитуды вертикальной качки и вернуть транспортное средство 100 в устойчивое состояние быстрее, чем при других изображенных сценариях.
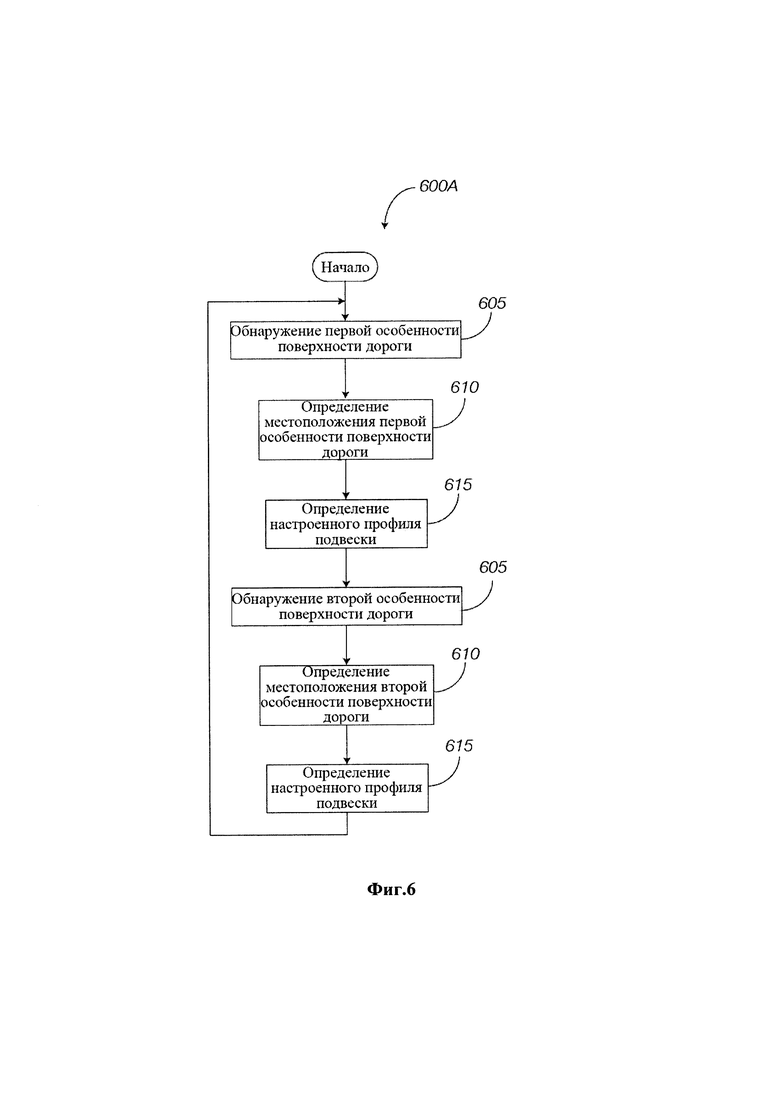
На фиг. 6 и 7 представлены блок-схемы примеров способов 600А и 600В, которые могут быть использованы системой транспортного средства с фиг. 2. На фиг.6 представлен способ 600А, который может быть выполнен в том случае, когда транспортное средство 100 в первый раз проезжает по определенному участку дороги, а на фиг. 7 представлен способ 600В, который может быть выполнен при последующих поездках по данному участку дороги.
Как на фиг. 6 показано, на этапе 605 один или несколько датчиков 130 могут обнаружить первую особенность поверхности дороги. Первая особенность поверхности дороги может быть обнаружена, например, на основании значения амплитуды вертикальной качки колес 110, испытываемой при проезде транспортного средства 100 по первой особенности поверхности дороги.
На этапе 610 устройство 135 обработки может определить местоположение первой особенности поверхности дороги, например, на основании выходных сигналов навигационной системы 120. Местоположение может быть сохранено на карте истории поездок.
На этапе 615 устройство 135 обработки может выбрать настроенный профиль подвески для применения в системе 105 подвески в следующий раз, когда транспортное средство 100 столкнется с первой особенностью поверхности дороги. Настроенный профиль подвески может быть выбран на основании таких факторов, как длина первой особенности поверхности дороги, величина амплитуды вертикальной качки, вызванной наличием первой особенности поверхности дороги, и т.д. Настроенный профиль подвески может быть ассоциирован с первой особенностью поверхности дороги на карте истории поездок.
На этапе 620 на той же или другой дороге устройство 135 обработки может обнаружить вторую особенность поверхности дороги. Вторая особенность поверхности дороги может быть обнаружена, например, на основании значения амплитуды вертикальной качки колес 110, испытываемой при проезде транспортного средства 100 по второй особенности поверхности дороги.
На этапе 625 устройство 135 обработки может определить местоположение второй особенности поверхности дороги. Как и в случае с первой особенностью поверхности дороги, местоположение второй особенности поверхности дороги может быть основано, например, на выходных сигналах навигационной системы 120. Местоположение второй особенности поверхности дороги может быть сохранено на карте истории поездок.
На этапе 630 устройство 135 обработки может определять настроенный профиль подвески для применения в системе 105 подвески в следующий раз, когда транспортное средство 100 столкнется со второй особенностью поверхности дороги. Как и настроенный профиль подвески, ассоциированный с первой особенностью поверхности дороги, профиль подвески, ассоциированный со второй особенностью поверхности дороги, может быть выбран на основании таких факторов, как длина второй особенности поверхности дороги, величина амплитуды вертикальной качки, вызванной наличием второй особенности поверхности дороги, и т.д. Настроенный профиль подвески может быть ассоциирован с первой особенностью поверхности дороги на карте истории поездок. Затем способ 600А может перейти на этап 605, что позволит непрерывно обновлять карту истории поездок на основании данных о других особенностях поверхности дороги.
Как на фиг. 7 показано, на этапе 635 устройство 135 обработки может обнаружить первую особенность поверхности дороги. Устройство 135 обработки может обнаружить первую особенность поверхности дороги на основании выходного сигнала одного или нескольких датчиков 130. Как было сказано выше, датчик 130 может обнаруживать первую особенность поверхности дороги, например, на основании скорости вращения колеса, вертикального ускорения, высоты подвески и т.д. При обнаружении первой особенности поверхности дороги данная дорога будет добавлена на карту истории поездок и может также быть использована для более точного определения местоположения транспортного средства 100.
На этапе 640 устройство 135 обработки может определить местоположение первой особенности поверхности дороги, например, на основании выходных сигналов одного или нескольких датчиков 130 и (или) карты истории поездок. Хотя для прогнозирования примерного или вероятного местоположения первой особенности поверхности дороги устройство 135 обработки может использовать карту истории поездок и навигационную систему 120, обнаружение первой особенности поверхности дороги на этапе 635 может быть использовано для подтверждения фактического местоположения первой особенности поверхности дороги. При некоторых возможных подходах устройство 135 обработки может обновлять карту истории поездок на основании фактических данных о местоположении или уточнять местоположение на основании результатов выполнения этапа 640.
На этапе 645 устройство 135 обработки может регистрировать местоположение первой особенности поверхности дороги на карте истории поездок. Регистрация местоположения первой особенности поверхности дороги может включать в себя подтверждение местоположения транспортного средства 100, выбор подходящей карты истории поездок на основании дороги, по которой движется транспортное средство 100, или маршрута, который был выбран транспортным средством 100, и т.д.
На этапе 650 устройство 135 обработки может определить местоположение второй особенности поверхности дороги. Вторая особенность поверхности дороги может находиться на следующем участке маршрута относительно первой особенности поверхности дороги, при этом расстояние между первой особенностью поверхности дороги и второй особенностью поверхности дороги может быть указано на карте истории поездок. Таким образом, устройство 135 обработки может использовать карту истории поездок для определения местоположения второй особенности поверхности дороги.
На этапе 655 устройство 135 обработки может применять определенный профиль подвески в системе системы 105 подвески. Профиль подвески может быть ассоциирован с неровностью дороги в местоположении второй особенности поверхности дороги. Используя карту истории поездок, устройство 135 обработки может выбрать определенный профиль подвески. Применение профиля подвески может включать в себя применение определенного коэффициента затухания, выбранного на основании ожидаемой неровности в местоположении второй особенности поверхности дороги. Коэффициент затухания для второй особенности поверхности дороги может отличаться от коэффициента затухания, примененного транспортным средством 100 при контакте с первой особенностью поверхности дороги, обнаруженной на этапе 605. Более того, как было сказано выше, коэффициент затухания может быть выбран на основании класса, к которому была отнесена вторая особенность поверхности дороги. При некоторых возможных подходах устройство 135 обработки также может применять настроенный профиль подвески в местоположении первой особенности поверхности дороги.
После этапа 655 способ 600В может вернуться на этап 635. В качестве альтернативы, если будет точно определено, что транспортное средство 100 проедет через несколько последовательно расположенных особенностей поверхности дороги, местоположения которых может быть определено на основании местоположения первой особенности поверхности дороги, способ 600В может вернуться на этап 650, чтобы определить местоположения последующих особенностей поверхности дороги и выбрать соответствующие коэффициенты затухания.
В общем случае вычислительные системы и (или) устройства, описанные выше, могут использовать операционную систему, включая, но не ограничиваясь этим, версии и (или) разновидности операционной системы Ford Sync®, операционной системы Microsoft Windows®; операционной системы Unix (например, операционной системы Solaris®, распространяемой компанией Oracle Corporation, г. Редвуд Шорз, Калифорния); операционной системы AIX UNIX, распространяемой компанией International Business Machines, г. Армонк, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc., г. Купертино, Калифорния, операционной системы BlackBerry, распространяемой компанией Research In Motion, г. Ватерлоо, Канада, и операционной системы Android, разработанной компанией Open Handset Alliance. Примеры вычислительных устройств включают в себя, не ограничиваясь этим, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный компьютер или карманный компьютер или некоторые другие вычислительные систему и (или) устройство.
Вычислительные устройства включают в себя машиночитаемые инструкции, при этом данные инструкции могут быть выполнены одним или несколькими вычислительными устройствами, например, устройствами, перечисленными выше. Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и (или) технологий программирования, включая, но не ограничиваясь этим, языки Java, С, С++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор (например, микропроцессор) принимает инструкции, например, от запоминающего устройства, машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым, реализуя один или несколько процессов, включая один или несколько процессов, приведенных в настоящем описании. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (сюда также относятся носители, читаемые процессором) может представлять собой любой энергонезависимый носитель (например, материальный носитель), предоставляющий данные (например, инструкции), которые могут быть обработаны компьютером (например, процессором компьютера). Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основного запоминающего устройства. Такие инструкции могут быть переданы с помощью одного или нескольких средств передачи данных, например, с помощью коаксиальных кабелей, медных кабелей и оптоволоконных кабелей, включающих в себя провода, которые являются частью системной шины, соединенной с процессором компьютера. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
Базы данных, архивы или другие описанные хранилища данных могут включать в себя различные механизмы для хранения, доступа и чтения различных данных, например, иерархические базы данных, наборы файлов в файловой системе, базы данных приложения в соответствующем формате, реляционные системы управления базами данных (RDBMS) и т.д. Каждое такое хранилище данных обычно встроено в вычислительное устройство с операционной системой, например, в одну из указанных выше систем, а доступ к ним осуществляется через сеть одним или несколькими любыми из существующих способов. Доступ к файловой системе может быть выполнен из операционной системы, при этом такая система может поддерживать различные форматы файлов. RDBMS обычно использует язык структурированных запросов (SQL) вместе с языком создания, хранения, редактирования и выполнения сохраненных процедур, например, PL/SQL.
В некоторых вариантах осуществления изобретения элементы системы могут представлять собой машиночитаемые инструкции (например, программное обеспечение) на одном или нескольких компьютерных устройствах (например, серверах, персональных компьютерах и т.д.) и могут храниться на соответствующем машиночитаемом носителе (например, дисках, запоминающих устройствах и т.д. Компьютерная программа может состоять из таких инструкций, сохраненных на машиночитаемом носителе, для выполнения описанных функций.
Что касается описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, такие процессы могут быть выполнены с использованием другой последовательности данных этапов. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а некоторые этапы могут быть добавлены или исключены. Другими словами, описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не могут рассматриваться как ограничение формулы изобретения.
Таким образом, следует понимать, что описание приведено выше в целях наглядности, а не ограничения. Многие варианты осуществления и способы применения, отличные от указанных примеров, станут очевидными после ознакомления с вышеприведенным описанием. Объем изобретения должен определяться не на основании приведенного выше описания, а на основании прилагаемой формулы изобретения вместе со всеми эквивалентами, указанными в данной формуле изобретения. Можно предположить и ожидать будущего развития технологий, упомянутых в данном описании изобретения, а также того, что раскрытые системы и способы будут включены в подобные будущие варианты осуществления изобретения. Таким образом, следует понимать, что применение изобретения может быть изменено и скорректировано.
Все термины, используемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в области технологий, упоминаемых в данном описании изобретения, если иное явно не указано в настоящем документе. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле изобретения не указано иное.
Реферат данного изобретения приведен для того, чтобы читатель мог получить общее представление о технической составляющей изобретения. Следует понимать, что представленный реферат не может быть использован для истолкования или ограничения объема или смысла формулы данного изобретения. Кроме того, в вышеизложенном подробном описании указано, что различные отличительные особенности сгруппированы вместе в различных вариантах осуществления с целью упорядочения раскрытия данного изобретения. Данный способ раскрытия не подразумевает того, что заявленные варианты осуществления настоящего изобретения должны иметь больше отличительных особенностей, чем указано в каждом пункте формулы изобретения. Напротив, как указано в следующей формуле изобретения, объект изобретения основан не на всех отличительных особенностях одного раскрытого варианта осуществления изобретения. Таким образом, приведенная ниже формула изобретения является частью подробного описания, при этом каждый пункт формулы представляет собой отдельно заявленный объект изобретения.
Изобретение относится к системе и способу для управления подвеской транспортного средства. Система для управления подвеской транспортного средства содержит: датчик, процессор, запрограммированный определять местоположение транспортного средства при обнаружении первой особенности поверхности дороги и управлять регулируемой системой подвески путем применения профиля подвески к регулируемой системе подвески до того, как транспортное средство достигнет второй особенности поверхности дороги. Способ управления системой подвески транспортного средства содержит этапы, на которых: формируют карту истории движения, которая идентифицирует множество особенностей поверхности дороги, определяют местоположение транспортного средства при обнаружении первой особенности поверхности дороги, определяют местоположение второй особенности поверхности дороги из карты истории движения при обнаружении первой особенности поверхности дороги и управляют системой подвески транспортного средства путем применения профиля подвески к системе подвески транспортного средства, при этом профиль подвески ассоциирован со второй особенностью поверхности дороги. Достигается регулирование подвески на основании данных о предшествующих поездках по тому же маршруту. 3 н. и 14 з.п. ф-лы, 7 ил.
1. Система для управления подвеской транспортного средства, содержащая:
датчик, выполненный с возможностью обнаруживать первую особенность поверхности дороги; и
процессор, запрограммированный определять местоположение транспортного средства при обнаружении первой особенности поверхности дороги и управлять регулируемой системой подвески путем применения профиля подвески к регулируемой системе подвески до того, как транспортное средство достигнет второй особенности поверхности дороги, при этом профиль подвески ассоциирован со второй особенностью поверхности дороги и при этом местоположение второй особенности поверхности дороги определяется из местоположения транспортного средства во время обнаружении первой особенности поверхности дороги, при этом первая особенность поверхности дороги и вторая особенность поверхности дороги представляют собой неровность дороги, измеренную во время предыдущих поездок по маршруту.
2. Система транспортного средства по п. 1, в которой применение профиля подвески включает в себя применение первого коэффициента затухания в системе подвески в местоположении первой особенности поверхности дороги и второго коэффициента затухания в местоположении второй особенности поверхности дороги.
3. Система транспортного средства по п. 2, в которой первый коэффициент затухания основан на характеристике первой особенности поверхности дороги, а второй коэффициент затухания основан на спрогнозированной характеристике второй особенности поверхности дороги.
4. Система транспортного средства по п. 3, в которой характеристика включает в себя неровность дороги.
5. Система транспортного средства по п. 2, в которой применение профиля подвески включает в себя применение третьего коэффициента затухания в системе подвески в спрогнозированном местоположении третьей особенности поверхности дороги, при этом местоположение третьей особенности поверхности дороги спрогнозировано в соответствии с местоположением первой особенности поверхности дороги.
6. Система транспортного средства по п. 1, в которой процессор, запрограммирован с возможностью определять местоположения первой особенности поверхности дороги и второй особенности поверхности дороги из карты истории движения.
7. Система транспортного средства по п. 6, в которой процессор запрограммирован с возможностью определять расстояние между первой особенностью поверхности дороги и второй особенностью поверхности дороги, основываясь на карте истории движения.
8. Система для управления подвеской транспортного средства, содержащая:
процессор, запрограммированный определять местоположение транспортного средства, основываясь на первой особенности поверхности дороги, обнаруженной датчиком, и управлять системой подвески транспортного средства путем применения профиля подвески к системе подвески транспортного средства, при этом профиль подвески ассоциирован со второй особенностью поверхности дороги и при этом местоположение второй особенности поверхности дороги определяется из местоположения транспортного средства во время обнаружения первой особенности поверхности дороги, при этом первая особенность поверхности дороги и вторая особенность поверхности дороги представляют собой неровность дороги, измеренную во время предыдущих поездок по маршруту.
9. Система транспортного средства по п. 8, в которой применение профиля подвески включает в себя применение первого коэффициента затухания в системе подвески в местоположении первой особенности поверхности дороги и второго коэффициента затухания в местоположении второй особенности поверхности дороги.
10. Система транспортного средства по п. 9, в которой первый коэффициент затухания основан на характеристике первой особенности поверхности дороги, а второй коэффициент затухания основан на спрогнозированной характеристике второй особенности поверхности дороги.
11. Система транспортного средства по п. 10, в которой характеристика включает в себя неровность дороги.
12. Система транспортного средства по п. 9, в которой применение профиля подвески включает в себя применение третьего коэффициента затухания в системе подвески в спрогнозированном местоположении третьей особенности поверхности дороги, при этом местоположение третьей особенности поверхности дороги спрогнозировано в соответствии с местоположением первой особенности поверхности дороги.
13. Система транспортного средства по п. 8, в которой процессор запрограммирован с возможностью определять местоположения первой особенности поверхности дороги и второй особенности поверхности дороги из карты истории движения.
14. Система транспортного средства по п. 8, в которой процессор запрограммирован с возможностью определять расстояние между первой особенностью поверхности дороги и второй особенностью поверхности дороги.
15. Способ управления системой подвески транспортного средства, содержащий этапы, на которых:
формируют карту истории движения, которая идентифицирует множество особенностей поверхности дороги, включающее в себя первую особенность поверхности дороги и вторую особенность поверхности дороги, вдоль маршрута, и при этом вторая особенность поверхности дороги находится после первой особенности поверхности дороги вдоль маршрута, при этом первая особенность поверхности дороги и вторая особенность поверхности дороги представляют собой неровность дороги, измеренную во время предыдущих поездок по маршруту;
определяют местоположение транспортного средства при обнаружении первой особенности поверхности дороги;
определяют местоположение второй особенности поверхности дороги из карты истории движения при обнаружении первой особенности поверхности дороги, при этом местоположение второй особенности поверхности дороги определяется из местоположения транспортного средства во время обнаружения первой особенности поверхности дороги; и
управляют системой подвески транспортного средства путем применения профиля подвески к системе подвески транспортного средства, при этом профиль подвески ассоциирован со второй особенностью поверхности дороги.
16. Способ по п. 15, в котором применение профиля подвески включает в себя применение первого коэффициента затухания в системе подвески в местоположении первой особенности поверхности дороги и второго коэффициента затухания в местоположении второй особенности поверхности дороги.
17. Способ по п. 15, в котором местоположение второй особенности поверхности дороги определяют из расстояния между первой особенностью поверхности дороги и второй особенностью поверхности дороги.
| СПОСОБ ОБНАРУЖЕНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С НИМ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2494415C2 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "СУП РЫБНЫЙ С КРАПИВОЙ" | 2006 |
|
RU2322903C1 |
| US 2009097038 A1, 16.04.2009. | |||

