Предшествующий уровень техники
Настоящее изобретение относится к навигации и определению местоположения устройства, такого как устройство связи или подобное устройство, и, более конкретно, к радиочастотной навигации или определению местоположения устройства с использованием сопоставления частотных характеристик.
Определение местоположения устройства с использованием радионавигации особенно затруднительно в пределах конструкции или иной рабочей среды, в которой устройство находится вблизи объектов, рассеивающих поле, которые могут сделать ненадежными методы, основанные на времени прибытия, и иные методики. Когда радионавигационный приемник или подобное устройство находится в ближней зоне одного или нескольких рассеивающих объектов, между сигналом прямой видимости (LOS) и сигналом непрямой видимости (NLOS), рассеянным рассеивающим объектом, может пройти недостаточно большой промежуток времени, чтобы можно было провести различие между этими типами сигналов. Это может привести к систематическим ошибкам порядка расстояния между приемником и рассеивающими объектами. В случае, когда требуется значительно более высокая точность позиционирования, методики, основанные на времени прибытия, могут быть ненадежными, особенно при ограниченной полосе пропускания сигнала.
Сущность изобретения
В соответствии с вариантом выполнения настоящего изобретения способ радионавигации может включать в себя прогнозирование частотной характеристики для каждого из множества возможных местоположений устройства. Способ может также включать в себя измерение частотной характеристики в фактическом местоположении устройства. Способ может дополнительно включать в себя сопоставление измеренной частотной характеристики с одной из спрогнозированных частотных характеристик для определения предполагаемого местоположения устройства, причем предполагаемое местоположение устройства соответствует возможному местоположению устройства, связанному с одной спрогнозированной частотной характеристикой, которая наиболее близко совпадает с измеренной частотной характеристикой.
В соответствии с другим вариантом выполнения настоящего изобретения способ радионавигации может включать в себя прогнозирование частотной характеристики для каждого из множества возможных местоположений устройства и измерение частотной характеристики в фактическом местоположении устройства. Способ может также включать в себя сравнение измеренной частотной характеристики с каждой из спрогнозированных частотных характеристик, соответственно связанных с каждым из множества возможных местоположений устройства. Способ может далее включать в себя выбор предполагаемого местоположения устройства из множества возможных местоположений устройства на основе наилучшего соответствия между измеренной частотной характеристикой и одной из спрогнозированных частотных характеристик.
В соответствии с еще одним вариантом выполнения настоящего изобретения устройство для радионавигации может включать в себя подсистему прогнозирования частотной характеристики для прогнозирования частотной характеристики для каждого из множества возможных местоположений устройства. Устройство может также включать в себя подсистему измерения частотной характеристики для измерения частотной характеристики в фактическом местонахождении устройства. Устройство может дополнительно включать в себя подсистему оценки местоположения для сравнения измеренной частотной характеристики с каждой из спрогнозированных частотных характеристик, соответственно связанных с каждым из множества возможных местоположений устройства, и для выбора предполагаемого местоположения устройства из множества возможных местоположений устройства на основе наилучшего соответствия между измеренной частотной характеристикой и одной из спрогнозированных частотных характеристик.
В соответствии с еще одним вариантом выполнения настоящего изобретения устройство для радионавигации может включать в себя средство для прогнозирования частотной характеристики для каждого из множества возможных местоположений устройства и средство для измерения частотной характеристики в фактическом местоположении устройства. Устройство может также включать в себя средство для сопоставления измеренной частотной характеристики с одной из спрогнозированных частотных характеристик для определения предполагаемого местоположения устройства, причем предполагаемое местоположение устройства соответствует возможному местоположению устройства, связанному с одной спрогнозированной частотной характеристикой, которая наиболее близко соответствует измеренной частотной характеристике.
В соответствии с еще одним вариантом выполнения настоящего изобретения компьютерный программный продукт для радионавигации может включать в себя используемый компьютером носитель, имеющий реализованный на нем используемый компьютером программный код. Используемый компьютером носитель может включать в себя используемый компьютером программный код, выполненный с возможностью сравнения измеренной частотной характеристики с каждой из множества спрогнозированных частотных характеристик, соответственно связанных с каждой из множества возможных местоположений устройства. Используемый компьютером носитель может также включать в себя используемый компьютером программный код, выполненный с возможностью выбора предполагаемого местоположения устройства из множества возможных местоположений устройства на основе наилучшего соответствия между измеренной частотной характеристикой и одной из спрогнозированных частотных характеристик.
В соответствии с еще одним вариантом выполнения настоящего изобретения средство передвижения может включать в себя устройство для радионавигации. Устройство для радионавигации может включать в себя средство для прогнозирования частотной характеристики для каждого из множества возможных местоположений средства передвижения и средство для измерения частотной характеристики в фактическом местоположении транспортного средства. Средство передвижения может также включать в себя средство для сопоставления измеренной частотной характеристики с одной из спрогнозированных частотных характеристик для определения предполагаемого местоположения средства передвижения, причем предполагаемое местоположение средства передвижения соответствует возможному местоположению средства передвижения, связанному с одной спрогнозированной частотной характеристикой, которая наиболее близко соответствует измеренной частотной характеристике.
Другие аспекты и характеристики технического решения, определяемого исключительно формулой, станут понятны обычному специалисту в данной области техники после ознакомления с нижеследующим неограничивающим подробным описанием изобретения совместно с прилагаемыми чертежами.
Краткое описание нескольких видов чертежей
Фиг.1 - иллюстрация радионавигационного устройства, выполненного с возможностью использовать сопоставление частотных характеристик для определения местоположения устройства в соответствии с вариантом выполнения настоящего изобретения.
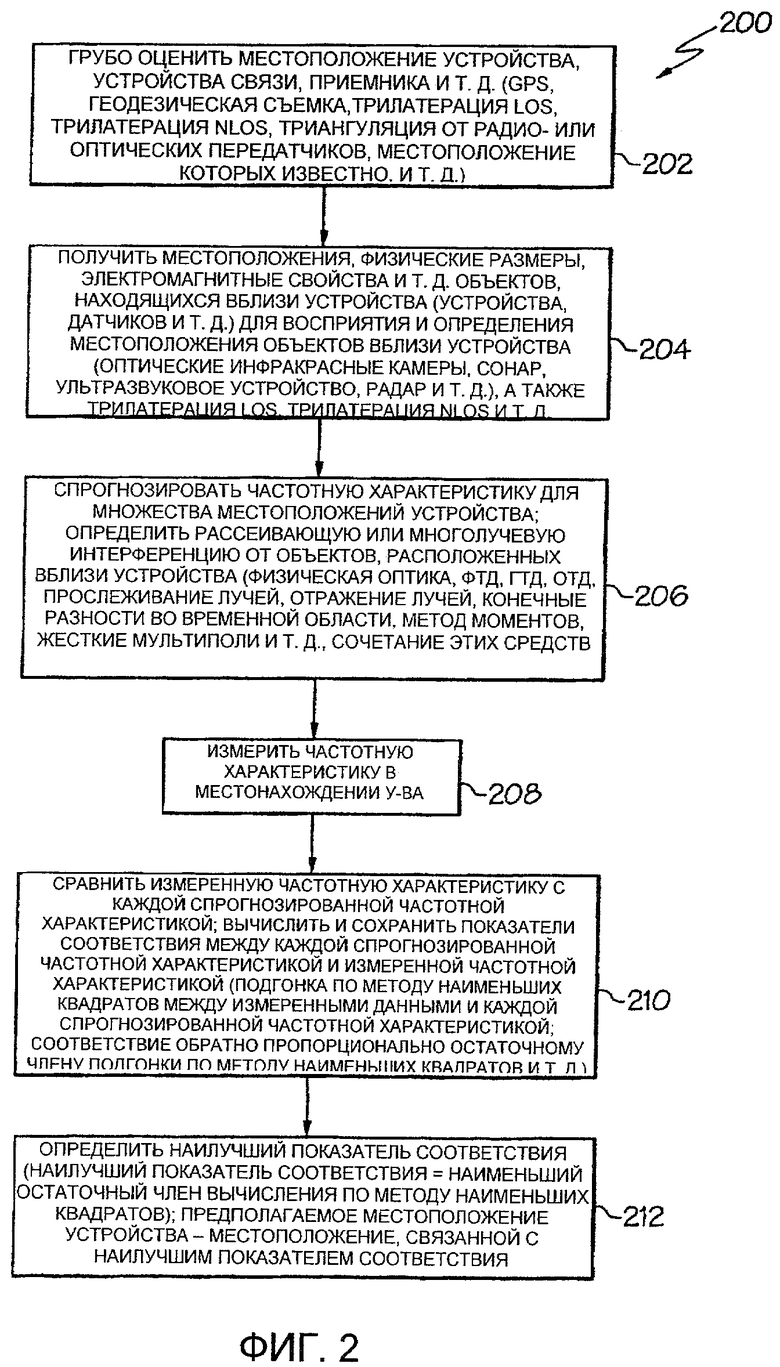
Фиг.2 - блок-схема последовательности операций для примера способа радиочастотной навигации с использованием сопоставления частотных характеристик в соответствии с вариантом выполнения настоящего изобретения.
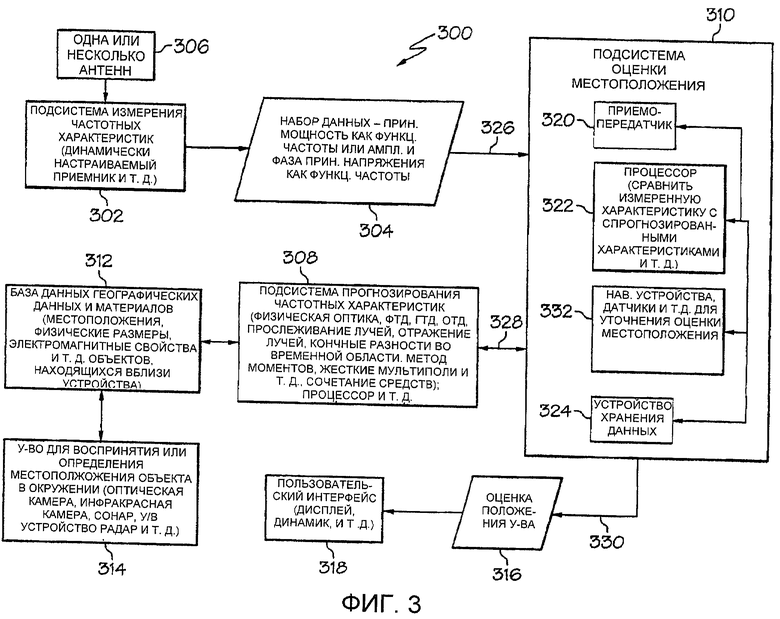
Фиг.3 - блок-схема примерного устройства для радиочастотной навигации с использованием сопоставления частотных характеристик в соответствии с вариантом выполнения настоящего изобретения.
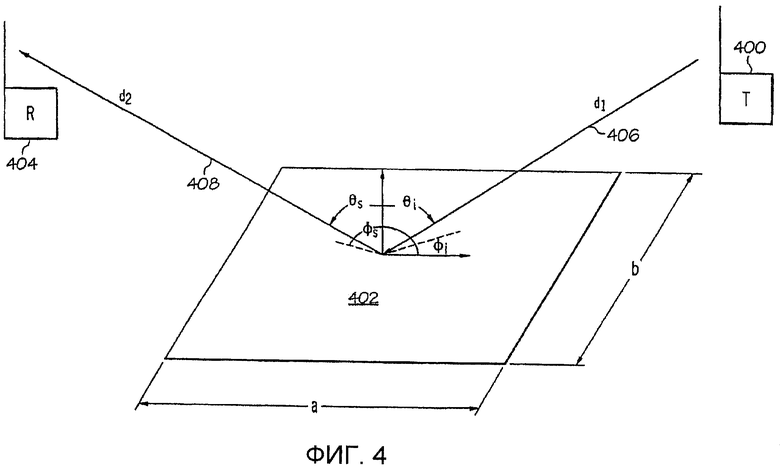
Фиг.4 - иллюстрация примеров прогнозирования рассеивающей интерференции объекта в соответствии с вариантом выполнения настоящего изобретения.
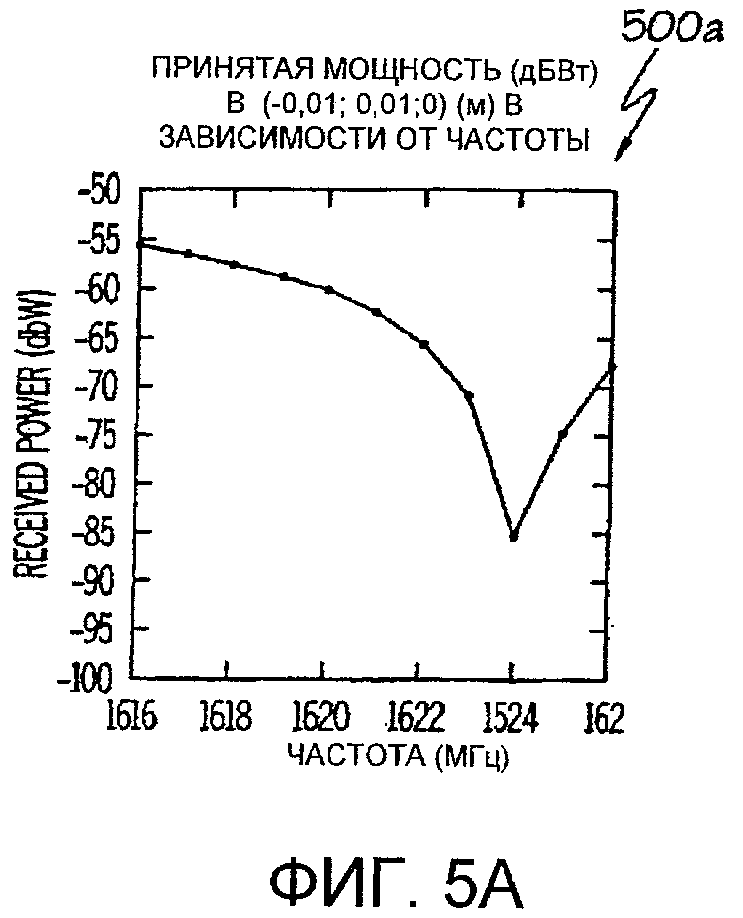
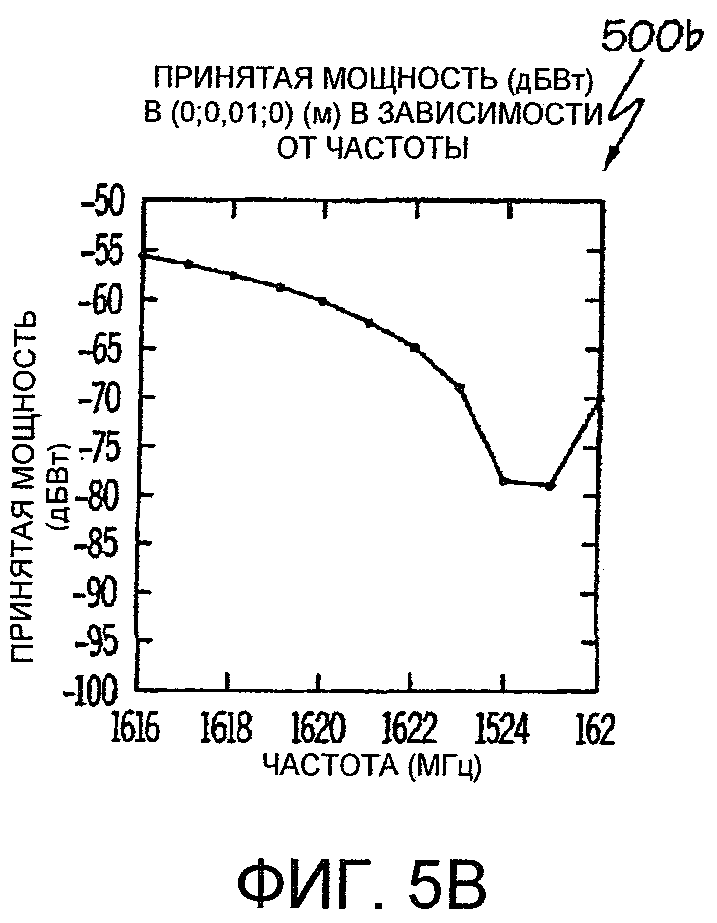
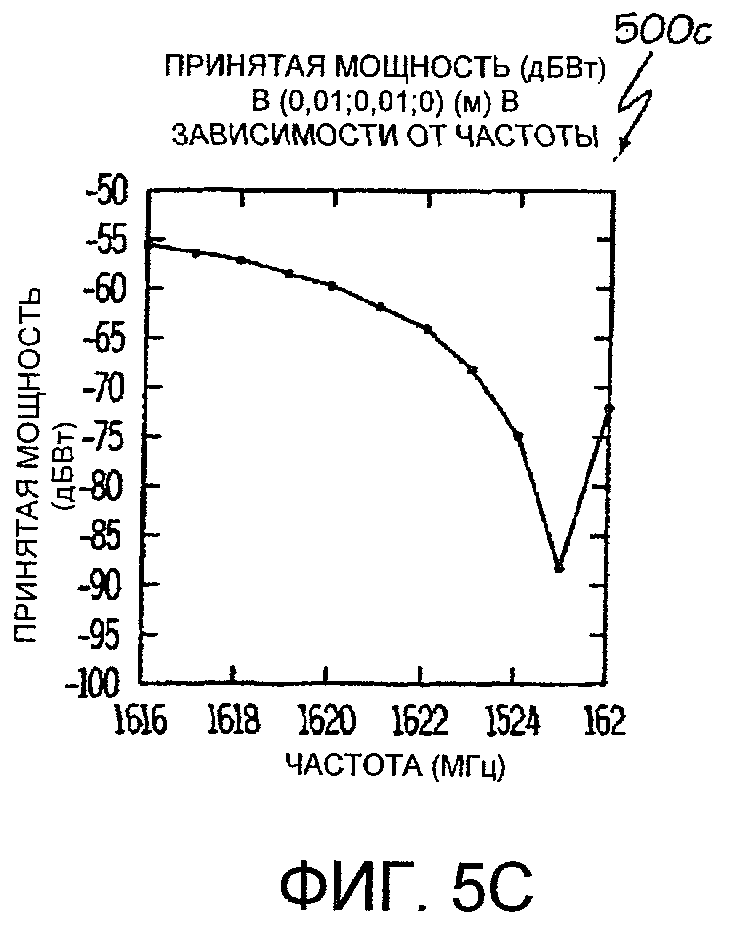
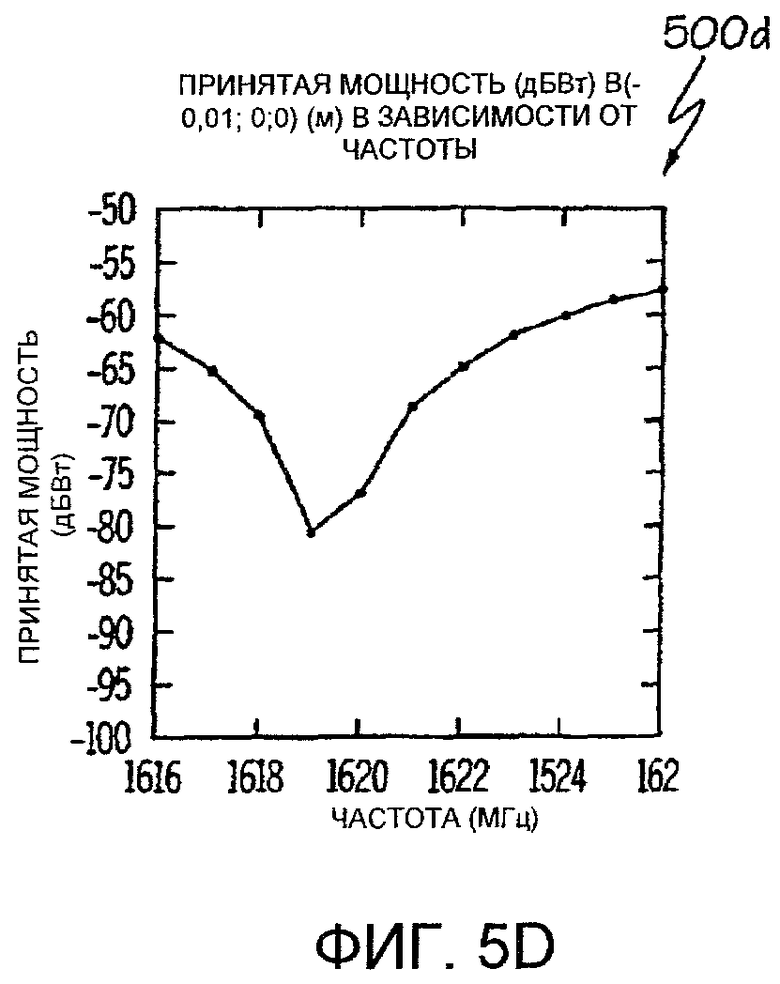
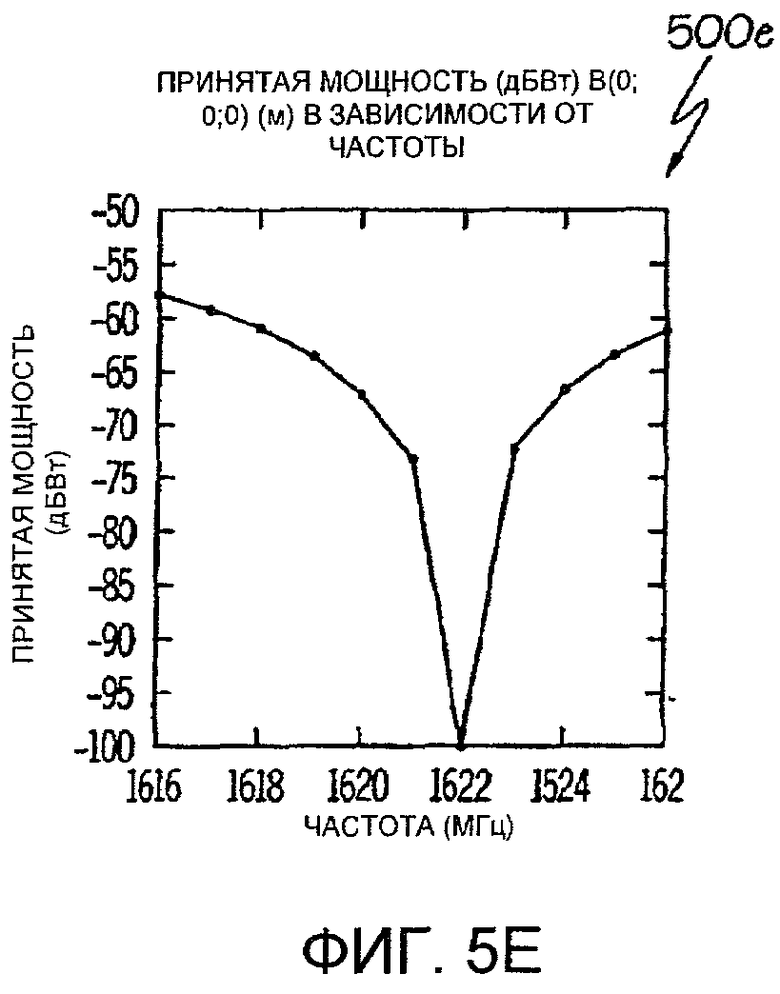
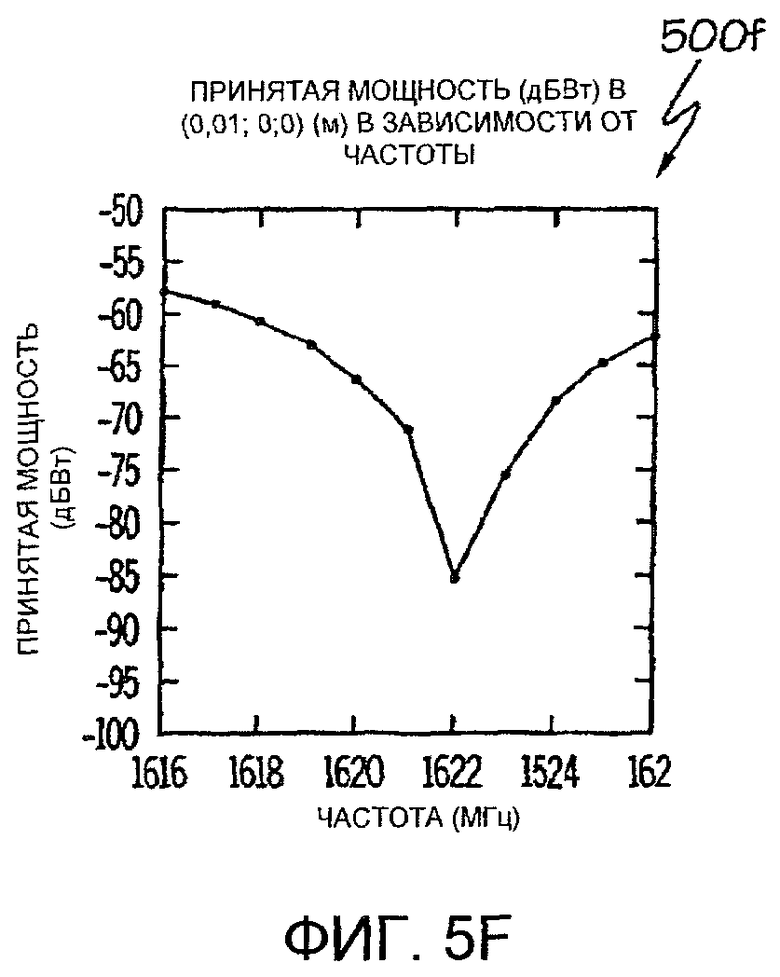
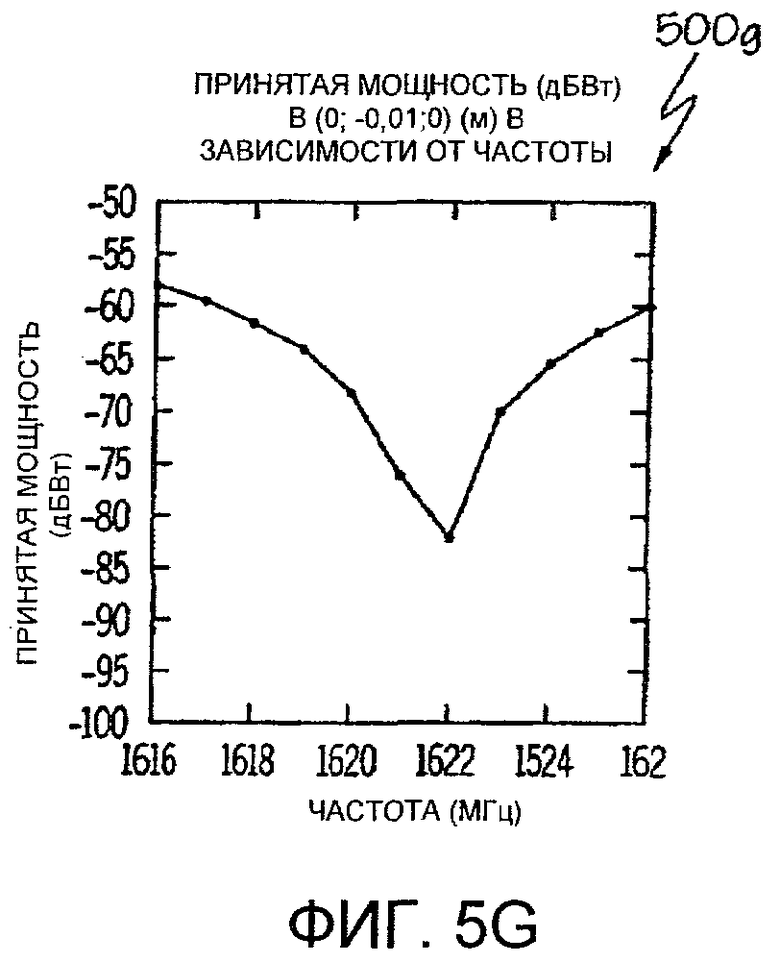
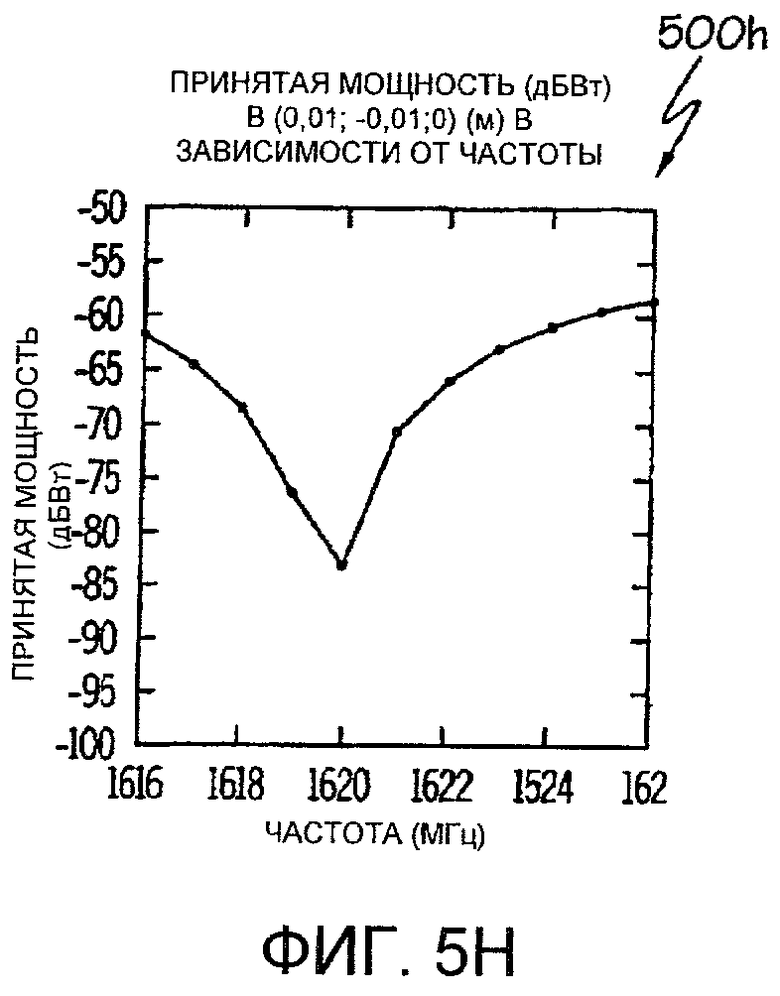
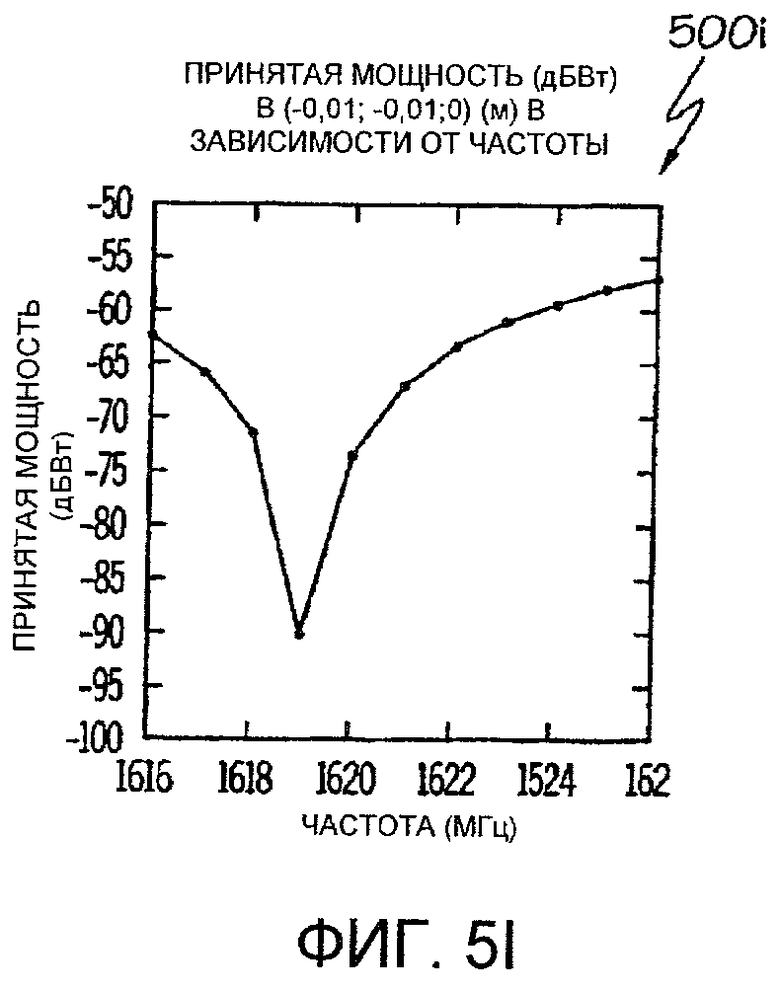
Фиг.5A-5I - иллюстрация примеров спрогнозированных частотных характеристик во множестве возможных местоположений вблизи устройства, для которого определяется местоположение, в соответствии с вариантом выполнения настоящего изобретения.
Подробное описание изобретения
Нижеследующее подробное описание вариантов выполнения содержит ссылки на прилагаемые чертежи, которые иллюстрируют частные варианты выполнения изобретения. Другие варианты выполнения, имеющие иную конструкцию и содержащие иные действия, не выходят за рамки объема настоящего изобретения.
Как должно быть понятно специалисту в данной области техники, раскрытое техническое решение может быть реализовано в виде способа, системы или компьютерного программного продукта. Соответственно, раскрытое техническое решение может принимать вид полностью аппаратного варианта выполнения, полностью программного варианта выполнения (включая встроенное программное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или варианта выполнения, сочетающего в себя программные и аппаратные аспекты, которые все могут в целом называться в настоящей заявке “схема”, “модуль” или “система”. Кроме того, настоящее изобретение может принимать вид компьютерного программного продукта на используемом компьютером носителе данных, имеющем используемый компьютером программный код, реализованный на носителе.
Можно использовать любой подходящий используемый компьютером или машиночитаемый носитель. В частности, используемый компьютером или машиночитаемый носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой, устройством или средой распространения. Частные примеры (неисчерпывающий список) машиночитаемых носителей включают в себя следующее: электрическое соединение, имеющее один или более проводов, переносная компьютерная дискета, жесткий диск, оперативная память (RAM), постоянная память (ROM), стираемая программируемая постоянная память (EPROM или флэш-память), оптическое волокно, постоянная память на переносном компакт-диске (CD-ROM), оптическое запоминающее устройство, среда передачи, например среды, поддерживающие Интернет и интрасеть, или магнитное запоминающее устройство. Заметим, что используемым компьютером или машиночитаемым носителем может быть даже бумага или иной подходящий носитель, на котором напечатана программа, поскольку эта программа может быть считана электронным образом, например, при помощи оптического сканирования бумаги или иного носителя, затем в случае необходимости скомпилирована, интерпретирована или иным образом обработана подходящим образом, после чего сохранена в памяти компьютера. В контексте настоящего документа используемый компьютером или машиночитаемый носитель может быть любым носителем, который может содержать, хранить, передавать, распространять или транспортировать программу для использования системой или устройством для выполнения команд или в связи с такой системой или устройством.
Компьютерный программный код для выполнения операций раскрытого технического решения может быть написан на объектно-ориентированном языке программирования, таком как Java, Smalltalk, С + + или подобном. Однако компьютерный программный код для выполнения этих операций может быть также написан на обычных процедурных языках программирования, таких как язык программирования “С” или подобные языки программирования. Программный код может выполняться целиком на компьютере пользователя, частично на компьютере пользователя, в качестве автономного программного пакета, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с компьютером пользователя посредством локальной сети (LAN) или глобальной сети (WAN), или может быть выполнено соединение с внешним компьютером (например, через интернет при помощи поставщика услуг в сети Интернет).
Наше техническое решение описано ниже со ссылкой на блок-схемы последовательности операций и (или) блок-схемы способов, устройств (систем) и компьютерных программных продуктов согласно вариантам выполнения изобретения. Должно быть понятно, что каждый блок на блок-схемах последовательности операций и (или) на блок-схемах и сочетаниях блоков на блок-схемах последовательности операций и (или) блок-схемах могут быть реализованы посредством команд компьютерной программы. Эти команды компьютерной программы могут поступать на процессор компьютера общего назначения, компьютера специального назначения или другое программируемое устройство обработки данных для создания машины, так что команды, которые выполняют посредством процессора компьютера или другого программируемого устройства обработки данных, создают средство для реализации функций/действий, указанных в блоке или блоках блок-схемы последовательности операций и (или) блок-схемы.
Эти команды компьютерной программы могут также храниться в машиночитаемой памяти, которая может управлять компьютером или другим программируемым устройством обработки данных, чтобы они функционировали определенным образом, так чтобы команды, хранящиеся в машиночитаемой памяти, создавали изделие, включающее в себя командное средство, которое реализует функцию/действия, указанные в блоке или блоках блок-схемы последовательности операций и (или) блок-схемы.
Команды компьютерной программы могут также быть загружены в компьютер или другое программируемое устройство обработки данных, чтобы вызвать выполнение последовательности функциональных этапов на компьютере или другом программируемом устройстве для создания реализуемого на компьютере процесса, так чтобы команды, которые выполняются на компьютере или другом программируемом устройстве, обеспечивали этапы для реализации функций/действий, указанных в блоке или блоках блок-схемы последовательности операций и (или) блок-схемы.
На фиг.1 приведено радионавигационное устройство 100, выполненное с возможностью применения сопоставления частотных характеристик для определения местоположения устройства 102 в соответствии с первым вариантом выполнения настоящего изобретения. Устройство 102 может быть устройством связи, приемником или иного рода устройством, для которого может требоваться определение местоположения в навигационных целях, целях слежения или других целях. Устройство 102 может быть средством передвижения, для которого требуется определение местоположения. Устройство может быть наземным средством передвижения, аэрокосмическим средством передвижения, водным средством передвижения или тому подобным. Навигационное устройство 100 может быть встроено в устройство 102 или может быть отдельным устройством, как показано в варианте выполнения на фиг.1. Пример радионавигационного устройства 300, которое можно использовать для устройства 100 для определения местоположения или оценки местоположения с использованием радионавигации или аналогичных методов, более подробно описано ниже со ссылкой на фиг.3.
Устройство 102 и (или) радионавигационное устройство 100 может принимать сигналы от другого устройства связи или передатчика 104. Устройство 104 также может быть средством передвижения, таким как аэрокосмическое средство передвижения, наземное средство передвижения, водное средство передвижения или тому подобное, связанным с устройством связи или передатчиком. Сигналы могут рассеиваться различными рассеивающими объектами 108, такими как окна, двери или другие элементы конструкции 106, как показано на фиг.1. Кроме того, радионавигационное устройство 100 в дополнение к основному сигналу может принимать от передатчика 104 множество рассеянных сигналов.
Как описано в настоящей заявке, радионавигационное устройство 100 может быть выполнено с возможностью прогнозировать частотную характеристику для каждого из множества возможных местоположений устройства 102 и измерять частотную характеристику в фактическом местоположении устройства 102. Радионавигационное устройство 100 может затем сопоставить измеренную частотную характеристику с одной из спрогнозированных частотных характеристик для определения предполагаемого местоположения устройства 102. Предполагаемое местоположение устройства может соответствовать возможному местоположению устройства, связанному с одной спрогнозированной частотной характеристикой, которая наиболее близко соответствует измеренной частотной характеристике. При прогнозировании частотных характеристик во множестве возможных местоположений устройства радионавигационное устройство 100 может принимать во внимание любые рассеивающие объекты или многолучевую интерференцию, вызванную рассеивающими объектами 108, такими как элементы конструкции 106, окна, двери или тому подобное, и электромагнитные свойства этих элементов или рассеивающих объектов 108.
На фиг.2 приведена последовательность операций для примера способа 200 для радиочастотной навигации с использованием сопоставления частотных характеристик в соответствии с вариантом выполнения настоящего изобретения. Способ 200 может быть реализован в радионавигационном устройстве 100. В блоке 202 может быть выполнена грубая оценка местоположения устройства. Устройство может быть устройством связи, приемником или иного рода устройством, для которого может требоваться определение географического местоположения. Устройство может быть расположено внутри конструкции, включающей в себя множество рассеивающих объектов, или в иной среде, которая может включать в себя множество рассеивающих объектов. Рассеивающие объекты могут находиться в ближнем поле с электромагнитной точки зрения или в пределах заданного числа длин волн от устройства или антенны, связанной с устройством связи или приемником.
Грубая оценка местоположения может быть выполнена с использованием системы глобального позиционирования, трилатерации в пределах прямой видимости (LOS), трилатерации вне пределов прямой видимости (NLOS), трилатерации с использованием радиочастотных или оптических передатчиков, местоположение которых известно, или других способов оценки местоположения.
В блоке 204 могут быть получены географическое местоположение, физические размеры, электромагнитные свойства или другие свойства объектов, находящихся вблизи устройства, местоположение которого определяется. Объекты, находящиеся вблизи устройства, могут включать в себя, в частности, элементы конструкции, людей, другие устройства или устройства связи либо иного рода объекты, которые могут рассеивать электромагнитную энергию или приводить к тому, что устройство, географическое местоположение которого определяется, принимает многолучевые сигналы или многолучевую интерференцию.
Местоположения, физические размеры, электромагнитные свойства и тому подобное могут быть определены или получены в блоке 204 при помощи устройств или датчиков для восприятия или определения местоположения объектов, таких как оптические камеры, инфракрасные камеры, эхолокатор, ультразвуковое устройство, радар или тому подобное устройство.
В блоке 206 на устройстве, местоположение которого определяется, может быть спрогнозирована частотная характеристика для множества местоположений устройства, которые могут быть возможными фактическими местоположениями устройства. При прогнозировании частотных характеристик могут определяться или учитываться рассеивающая или многолучевая интерференция от любых объектов, находящихся вблизи устройства. Рассеивающая или многолучевая интерференция может быть определена или спрогнозирована с использованием таких методов, как методы физической оптики, физической теории дифракции (ФТД), геометрической теории дифракции (ГТД), единой теории дифракции (ЕТД), прослеживания лучей, отражения лучей, конечных разностей во временной области, метод моментов, метод жестких мультиполей или аналогичные методы либо сочетание двух или более из этих методов.
Рассеивающая или многолучевая интерференция может быть определена или спрогнозирована посредством прогнозирования ожидаемой принимаемой мощности. Пример прогнозирования принимаемой мощности с использованием методов физической оптики или аналогичных методов описан ниже со ссылкой на фиг.4. На фиг.4 сигнал или волна, передаваемая передатчиком 400, может рассеиваться рассеивающим объектом 402 и приниматься приемником 404. В этом примере с целью пояснения принципов изобретения рассеивающий объект 402 может быть плоской проводящей пластиной. Падающая волна, изображаемая на фиг.4 стрелкой 406, может падать на рассеивающий объект 402 под углом возвышения θi и азимутальным углом φi, как показано в примере на фиг.4. Рассеянная волна, представленная стрелкой 408 на фиг.4, может отражаться рассеивающим объектом 402. Прогнозируемая принимаемая мощность может определяться формулой (1)

где
Pr = принимаемая мощность (в ваттах);
Pt = мощность передатчика (в ваттах);
Gt = коэффициент усиления передающей антенны в направлении рассеивающего объекта;
d1 = расстояние между передатчиком и рассеивающим объектом (в метрах);
Gr = коэффициент усиления приемной антенны в направлении рассевающего объекта;
d2 = расстояние между рассеивающим объектом и приемником (в метрах);
λ = длина волны радиоволны (в метрах);
σ = бистатическая эффективная поверхность рассеяния рассеивающего объекта;
В физической оптике бистатическую эффективную поверхность рассеяния (σ) плоской прямоугольной металлической пластины, такой как в примере на фиг.4, можно определить из формулы (2)

где
X=π/2∗a[sin(θi)∗cos(φi)+sin(θs)∗cos(φs)];
Y=π/2∗b[sin(θi)∗sin(φi)+sin(θs)∗sin(φs)];
λ = длина волны радиоволны (в метрах);
a = длина пластины;
b = ширина пластины;
θi = угол возвышения падающей волны;
φi = азимутальный угол падающей волны;
θs = угол возвышения рассеянной волны;
φs = азимутальный угол рассеянной волны.
На фиг.5A-5I приведены примеры спрогнозированных частотных характеристик 500а-500i во множестве возможных местоположений устройства, для которого определяется местоположение, в соответствии с вариантом выполнения настоящего изобретения. Эти характеристики 500 могут быть сохранены для сравнения и сопоставления с измеренной частотной характеристикой в фактическом местонахождении устройства, для которого определяется местоположение, как описано в настоящей заявке.
В блоке 208 может быть измерена фактическая частотная характеристика в местоположении устройства. Частотная характеристика может быть измерена с использованием динамически настраиваемого приемника или иного рода устройства, выполненного с возможностью измерения частотной характеристики сигнала или сигналов, переданных передатчиком, таким как передатчик 104 на фиг.1. Устройство для измерения фактической частотной характеристики может быть составной частью радионавигационного устройства 100.
В блоке 210 фактическую измеренную частотную характеристику из блока 208 можно сравнить с каждой спрогнозированной частотной характеристикой из блока 206, соответствующей различным возможным местоположениям устройства. Измеренную частотную характеристику можно сопоставить с одной из спрогнозированных частотных характеристик, которая наиболее близко соответствует измеренной частотной характеристике. Предполагаемое местоположение устройства может соответствовать возможным местоположениям устройства, связанным с той предсказанной частотной характеристикой, которая наиболее близко соответствует измеренной характеристике.
Пример сопоставления измеренной частотной характеристики с одной из спрогнозированных частотных характеристик может включать в себя вычисление и сохранение показателей соответствия между каждой спрогнозированной частотной характеристикой и измеренной частотной характеристикой. Между измеренной частотной характеристикой или характеристиками и каждой спрогнозированной частотной характеристикой может быть вычислено соответствие путем подгонки методом наименьших квадратов. Степень соответствия может быть обратно пропорциональна остаточному члену подгонки по методу наименьших квадратов. Можно также применять и другие способы определения соответствия или показателя соответствия между измеренной частотной характеристикой и спрогнозированной частотной характеристикой для множества различных возможных местоположений устройства.
В блоке 212 может быть выбран наилучший показатель соответствия. Наилучшим показателем соответствия может быть наименьший остаточный член в вычислениях по методу наименьших квадратов в этом варианте выполнения настоящего изобретения, в котором используется анализ методом наименьших квадратов для вычисления показателя соответствия для сопоставления измеренной частотной характеристики со спрогнозированными частотными характеристиками. Местоположение устройства может быть по существу местоположением, связанным с этим наилучшим показателем соответствия.
На фиг.3 приведена блок-схема примерного устройства или системы 300 для радиочастотной навигации с использованием сопоставления частотных характеристик в соответствии с вариантом выполнения настоящего изобретения. Устройство или система 300 могут быть реализованы в устройстве 100 на фиг.1, которое может быть также встроено в устройство 102. Способ 200 может быть реализован в устройстве 300. Различные блоки или модули способа 200 могут быть реализованы в различных элементах или подсистемах или в сочетаниях элементов или подсистем устройства 300. Устройство 300 может быть также средством передвижения, таким как аэрокосмическое средство передвижения, наземное средство передвижения, водное средство передвижение или тому подобное.
Устройство 300 может включать в себя подсистему 302 измерения частотной характеристики. Подсистема 302 измерения частотной характеристики может измерять частотную характеристику сигнала в фактическом местоположении устройства 300 или устройства, местоположение которого подлежит определению. В одном варианте выполнения настоящего изобретения подсистема 302 измерения частотной характеристики может включать в себя динамически настраиваемый приемник или аналогичное устройство для измерения частотной характеристики. Динамически настраиваемый приемник может измерять мощность при частотах из набора выборочных частот по всему заданному диапазону.
В другом варианте выполнения настоящего изобретения подсистема 302 измерения частотной характеристики может включать в себя широкополосный приемник или аналогичное устройство. Широкополосный приемник может измерять временную характеристику сигнала и может вычислять частотную характеристику посредством применения преобразования Фурье к временной характеристике.
Выходные данные 304 подсистемы 302 измерения частотной характеристики может представлять собой набор данных, содержащих либо принятую мощность как функцию частоты, либо амплитуду и фазу принятого напряжения как функции частоты.
Устройство 300 или подсистема 302 измерения частотной характеристики может быть снабжено одной или несколькими антеннами 306. В еще одном варианте настоящего изобретения система 300 может использовать антенны, чувствительные к поляризации или к углу прихода. В этом варианте изобретения выходные данные 304 подсистемы 302 измерения частотной характеристики могут в этом случае включать в себя принятую мощность (или амплитуду и фазу принятого напряжения) как функцию поляризации и направления антенны, а также частоты.
Система или устройство 300 может также включать в себя подсистему 308 прогнозирования частотной характеристики. Подсистема 308 прогнозирования частотной характеристики может прогнозировать частотную характеристику сигнала, который может быть принят во множестве возможных местоположений в окрестности или вблизи устройства 300 или устройства, местоположение которого определяется и которое связано с устройством или системой 300. Прогнозирование частотной характеристики может быть вычислено с использованием физической оптики, физической теории дифракции (ФТД), геометрической теории дифракции (ГТД), единой теории дифракции (ЕТД), прослеживания лучей, отражения лучей, методом конечных разностей во временной области, методом моментов, методом жестких мультиполей или гибридного сочетания любых из этих методов или других вычислительных электромагнитных методов.
Приблизительное местоположение устройства 300 может поступить в подсистему 310 оценки местоположения. При прогнозировании местоположения можно использовать физическое описание любых объектов или рассеивающих объектов в окружении устройства 300. Объектами могут быть здания, стены, окна, полы, крыши, мебель, жители и другие объекты. Жителем может быть как лицо, управляющее устройством 300 (если только это устройство не включает в себя роботизированное устройство или не установлено на роботизированном устройстве), так и любые иные лица в ближнем окружении. При прогнозировании местоположения может также учитываться влияние на принятый сигнал антенны или антенн 306, устройства 300 или других устройств в окружении.
Местоположения, физические размеры и электромагнитные материалы этих объектов могут поступать в подсистему 312 базы данных географических данных и материалов. Подсистема 308 может также включать в себя вычислительное устройство и интерфейсы связи с подсистемой 310 оценки местоположения и базой данных 312 географических данных и материалов.
Подсистема 312 базы данных географических данных и материалов может включать в себя карты рабочей среды, схемы зданий и других конструкций, описания электромагнитных материалов для объектов в окружающей среде и любые другие данные, которые могут помочь при прогнозировании частотных характеристик подсистемой 308 прогнозирования частотных характеристик. Подсистема 312 базы данных географических данных и материалов может также включать в себя или может быть связана с устройством 314 для восприятия и обнаружения объектов в окрестности устройства или системы 300, которые могут повлиять на частотную характеристику какого-либо сигнала, принимаемого устройством 300. С учетом приблизительного или грубого местоположения устройства 300, определенного в блоке 202 способа 200 на фиг.2, подсистема 312 базы данных географических данных и материалов может предоставить подсистеме 308 прогнозирования частотных характеристик физические описания всех известных объектов в окрестности устройства 300. Физическое описание каждого объекта может включать в себя местоположение объекта, угловую ориентацию, физические размеры и основные электромагнитные свойства материалов, содержащихся в объекте. Подсистема 308 прогнозирования частотных характеристик может использовать эти данные для прогнозирования частотных характеристик в окрестности устройства 300.
Подсистема 312 базы данных географических данных и материалов может также включать в себя вычислительные и запоминающие устройства и интерфейсы связи с другими подсистемами. Подсистема 312 базы данных географических данных и материалов может дополнительно включать в себя или может быть связана с акустическими, радиочастотными, инфракрасными, ультрафиолетовыми и оптическими приемопередатчиками или датчиками 314 или другими устройствами, выполненными с возможностью восприятия или определения местоположения физических объектов в окрестности устройства 300. Такое устройство может включать в себя оптические и инфракрасные камеры, сонары, ультразвуковые устройства и радар. Подсистема 312 или устройство 300 может также включать в себя радиоприемопередатчик для обмена данными с другими устройствами внутри и вне местной рабочей среды устройства 300.
Подсистема 310 оценки местоположения может оценивать местоположение устройства 300 посредством сравнения измеренной характеристики 304 с каждой из спрогнозированных характеристик из системы 302 прогнозирования частотных характеристик и может выбрать наилучшее соответствие. В качестве оценки местоположения устройства может быть выбрано местоположение, соответствующее спрогнозированной частотной характеристике, которая наилучшим образом соответствует измеренной частотной характеристике. Как указывалось выше, в одном варианте настоящего изобретения наилучшее соответствие может быть определено посредством вычисления показателя соответствия между каждой частотной характеристикой, соответствующей возможному или спрогнозированному местоположению устройства, и измеренной частотной характеристикой в фактическом местоположении устройства. Исходный показатель соответствия может быть вычислен посредством подгонки методом наименьших квадратов между измеренной частотной характеристикой и каждой спрогнозированной частотной характеристикой. Соответствие обратно пропорционально остаточному члену, полученному в результате подгонки по методу наименьших квадратов. Хорошее совпадение спрогнозированной и измеренной характеристик характеризуется малым остаточным членом и высокой степенью соответствия.
Подсистема 310 оценки местоположения может выдавать пользователю оценку 316 местоположения устройства посредством пользовательского интерфейса 318, которым может быть графический интерфейс, выполненный с возможностью представлять данные на дисплее, иной интерфейс, способный указывать местоположение устройства при помощи видеоизображения и звука. Интерфейс 318 может быть встроен в качестве составной части подсистемы 310 оценки местоположения или может быть отдельным компонентом.
Подсистема 310 оценки местоположения может также включать в себя приемопередатчик 320 для передачи местоположения устройства посредством радиосвязи внешним устройствам внутри и вне рабочей среды устройства 300 для обеспечения возможности отслеживать устройство 300. Подсистема 310 оценки местоположения может также предоставлять приблизительные местоположения устройства 300 подсистеме 308 прогнозирования частотной характеристики.
Подсистема 310 оценки местоположения может дополнительно включать в себя вычислительное устройство или процессор 322 для сравнения измеренной частотной характеристики со спрогнозированными характеристиками и для выполнения иных функций. Могут иметься запоминающее устройство 324 или устройства для хранения данных, и могут быть предоставлены интерфейсы 326, 328 и 339 связи с другими подсистемами. Подсистема 310 оценки местоположения может также включать в себя навигационные устройства 332, такие как инерциальные навигационные устройства или тому подобные, или иные датчики для уточнения оценки местоположения.
Блок-схемы последовательности операций и блок-схемы на чертежах иллюстрируют архитектуру, функциональные возможности и работу возможных вариантов реализации систем, способов и компьютерных программных продуктов согласно различным вариантам выполнения изобретения. В этом отношении каждый блок в блок-схеме последовательности операций или блок-схемах может представлять модуль, сегмент или участок кода, который содержит одну или несколько исполняемых команд для реализации определенной(ых) логической(их) функции(ий). Следует также заметить, что в некоторых альтернативных вариантах реализации функции, указанные в блоке, могут выполняться в порядке, отличном от указанного на чертежах. Например, два блока, изображенные последовательно, могут в действительности выполняться по существу одновременно, или блоки могут иногда выполняться в обратном порядке в зависимости от используемых функциональных возможностей. Следует также заметить, что каждый блок на блок-схемах последовательности операций и (или) блок-схемах и сочетаниях блоков на блок-схемах последовательности операций и (или) блок-схемах могут быть реализованы при помощи аппаратной системы специального назначения, которая выполняет определенные функции или действия, или при помощи сочетаний аппаратной системы специального назначения и компьютерных команд.
Используемая в настоящей заявке терминология предназначена только для описания частных вариантов выполнения и не накладывает никаких ограничений на изобретение. В настоящей заявке подразумевается, что формы единственного числа включают в себя также формы множественного числа, если иное не следует с очевидностью из контекста. Следует также понимать, что термины “содержит” и (или) “содержащий”, используемые в настоящем описании, указывают на наличие перечисленных признаков, целых чисел, этапов, операций, элементов и (или) компонентов, но не исключают наличия или добавления одного или нескольких иных признаков, целых чисел, этапов, операций, элементов, компонентов и (или) их групп.
Хотя в настоящей заявке были проиллюстрированы и описаны частные варианты выполнения, специалистам в данной области техники должно быть понятно, что любая схема, которая согласно расчетам обеспечивает достижение той же цели, может заменить приведенные частные варианты выполнения, и что изобретение имеет другие применения при других условиях. Подразумевается, что настоящая заявка охватывает любые адаптации и видоизменения настоящего изобретения. Нижеприведенная формула ни в коей мере не подразумевает ограничение объема изобретения частными вариантами выполнения, описанными в настоящей заявке.
Изобретение относится к навигации и определению местоположения устройства. Способ предусматривает стадии, на которых прогнозируют частотную характеристику для каждого из множества возможных местоположений устройства; измеряют частотную характеристику в фактическом местоположении устройства; сопоставляют измеренную частотную характеристику с одной из спрогнозированных частотных характеристик для определения предполагаемого местоположения устройства, причем предполагаемое местоположение устройства соответствует возможному местоположению устройства, связанному с одной спрогнозированной частотной характеристикой, которая наиболее близко совпадает с измеренной частотной характеристикой. Также заявлено устройство, реализующее указанный способ и транспортное средство. Технический результат заключается в повышении точности позиционирования. 5 н. и 21 з.п. ф-лы, 13 ил.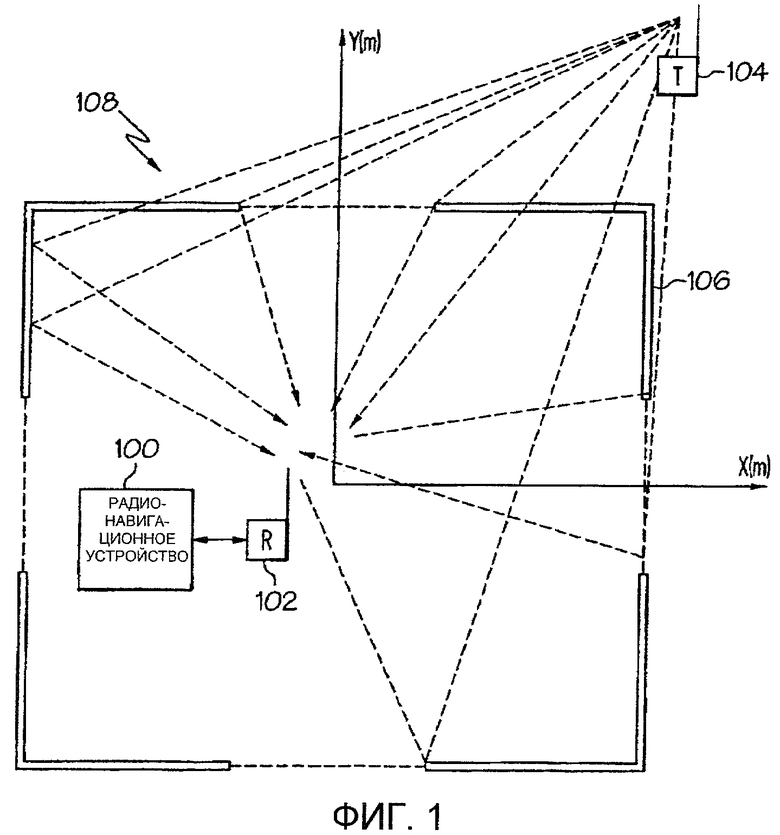
1. Способ радионавигации, предусматривающий стадии, на которых: прогнозируют частотную характеристику для каждого из множества возможных местоположений устройства; измеряют частотную характеристику в фактическом местоположении устройства; сопоставляют измеренную частотную характеристику с одной из спрогнозированных частотных характеристик для определения предполагаемого местоположения устройства, определяют местоположение любых объектов, находящихся вблизи устройства; определяют физические размеры любых объектов, находящихся вблизи устройства; определяют электромагнитные свойства любых объектов, находящихся вблизи устройства; причем предполагаемое местоположение устройства соответствует возможному местоположению устройства, связанному с одной спрогнозированной частотной характеристикой, которая наиболее близко совпадает с измеренной частотной характеристикой.
2. Способ по п.1, в котором сопоставление измеренной частотной характеристики с одной из спрогнозированных частотных характеристик содержит стадии, на которых: сравнивают измеренную частотную характеристику с каждой из спрогнозированных частотных характеристик, соответственно связанных с каждой из множества возможных местоположений устройства; и выбирают предполагаемое местоположение устройства из множества возможных местоположений устройства на основе наилучшего соответствия между измеренной частотной характеристикой и спрогнозированной частотной характеристикой.
3. Способ по п.1, дополнительно содержащий стадию, на которой определяют показатель соответствия между каждой спрогнозированной частотной характеристикой и измеренной частотной характеристикой.
4. Способ по п.1, дополнительно содержащий подгонку по методу наименьших квадратов между измеренной частотной характеристикой и каждой спрогнозированной частотной характеристикой.
5. Способ по п.4, дополнительно содержащий стадию, на которой определяют показатель соответствия как обратно пропорциональный остаточному члену подгонки по методу наименьших квадратов для измеренной частотной характеристики и каждой спрогнозированной частотной характеристики.
6. Способ по п.5, дополнительно содержащий стадию, на которой выбирают наилучший показатель соответствия, соответствующий наименьшему остаточному члену подгонки по методу наименьших квадратов между измеренной частотной характеристикой и каждой спрогнозированной частотной характеристикой, причем предполагаемое местоположение устройства соответствует возможному местоположению устройства с наилучшим показателем соответствия.
7. Способ по п.1, дополнительно содержащий стадию, на которой выполняют грубую оценку местоположения устройства; причем грубая оценка местоположения устройства содержит по меньшей мере одно из определения местоположения при помощи системы глобального позиционирования; геодезической съемки, трилатерации в пределах прямой видимости, трилатерации вне пределов прямой видимости, триангуляции по радиочастотному или оптическому передатчику, местоположение которого известно, и сочетание любых из этих методов.
8. Способ по п.1, дополнительно содержащий стадию, на которой при прогнозировании частотной характеристики определяют рассеяние от любых объектов, находящихся вблизи устройства.
9. Способ по п.8, дополнительно содержащий стадию, на которой при прогнозировании частотной характеристики определяют многолучевую интерференцию, вызванную любыми объектами, находящимися вблизи устройства.
10. Способ по п.9, в котором стадия определения многолучевой интерференции, вызванной любыми объектами, находящимися вблизи устройства, предусматривает по меньшей мере одну из следующих стадий: применяют физическую оптику; применяют физическую теорию дифракции; применяют геометрическую теорию дифракции; применяют единую теорию дифракции; применяют прослеживание лучей; применяют отражение лучей; применяют метод конечных разностей во временной области; применяют метод моментов; применяют метод жестких мультиполей и применяют сочетание вышеперечисленного.
11. Способ радионавигации, предусматривающий стадии, на которых: прогнозируют частотную характеристику для каждого из множества возможных местоположений устройства; измеряют частотную характеристику в фактическом местоположении устройства; сравнивают измеренную частотную характеристику в каждой из спрогнозированных частотных характеристик, соответственно связанных с каждым из множества возможных местоположений устройства; определяют местоположение любых объектов, находящихся вблизи устройства; определяют физические размеры любых объектов, находящихся вблизи устройства; определяют электромагнитные свойства любых объектов, находящихся вблизи устройства; и выбирают предполагаемое местоположение устройства из множества возможных местоположений устройства на основе наилучшего соответствия между измеренной частотной характеристикой и одной из спрогнозированных частотных характеристик.
12. Способ по п.11, дополнительно содержащий стадию, на которой определяют показатель соответствия между каждой спрогнозированной частотной характеристикой и измеренной частотной характеристикой.
13. Способ по п.12, в котором определение показателя соответствия предусматривает стадию, на которой определяют остаточный член подгонки по методу наименьших квадратов для измеренной частотной характеристики и каждой спрогнозированной частотной характеристики, причем показатель соответствия обратно пропорционален остаточному члену подгонки по методу наименьших квадратов.
14. Способ по п.13, дополнительно содержащий стадию, на которой выбирают наилучший показатель соответствия, соответствующий наименьшему остаточному члену подгонки по методу наименьших квадратов между измеренной частотной характеристикой и каждой спрогнозированной частотной характеристикой, причем предполагаемое местоположение устройства соответствует возможному местоположению устройства с наилучшим показателем соответствия.
15. Способ по п.11, дополнительно содержащий стадию, на которой при прогнозировании частотной характеристики определяют многолучевую интерференцию, вызванную любыми объектами, находящимися вблизи устройства.
16. Устройство радионавигации, содержащее: подсистему прогнозирования частотной характеристики для прогнозирования частотной характеристики для каждого из множества возможных местоположений устройства; подсистему измерения частотной характеристики для измерения частотной характеристики в фактическом местоположении устройства; блок для определения местоположения любых объектов, находящихся вблизи устройства; определения физических размеров любых объектов, находящихся вблизи устройства; определения электромагнитных свойств любых объектов, находящихся вблизи устройства, и подсистему оценки местоположения для сравнения измеренной частотной характеристики с каждой из спрогнозированных частотных характеристик, соответственно связанных с каждым из множества возможных местоположений устройства, и для выбора предполагаемого местоположения устройства из множества возможных местоположений устройства на основе наилучшего соответствия между измеренной частотной характеристикой и одной из спрогнозированных частотных характеристик.
17. Устройство по п.16, дополнительно содержащее базу данных географических данных и материалов для хранения местоположений, физических размеров и электромагнитных свойств любых объектов, находящихся вблизи устройства.
18. Устройство по п.16, дополнительно содержащее устройство для восприятия или определения местоположения любых объектов, находящихся вблизи устройства.
19. Устройство по п.16, дополнительно содержащее пользовательский интерфейс для представления оценки местоположения устройства, приемопередатчик для передачи местоположения устройства удаленному устройству связи.
20. Устройство по п.16, в котором система измерения частотной характеристики содержит динамически настраиваемый приемник.
21. Устройство по п.17, в котором подсистема частотных характеристик дополнительно содержит модуль для определения многолучевой интерференции, вызванной объектами, находящимися вблизи устройства.
22. Устройство по п.16, дополнительно содержащее устройства определения местоположения, связанные с подсистемой оценки местоположения, для уточнения оценки местоположения.
23. Устройство для радионавигации, содержащее: средство для прогнозирования частотной характеристики для каждого из множества возможных местоположений устройства; средство для измерения частотной характеристики в месте фактического местоположения устройства; средство определения местоположения любых объектов, находящихся вблизи устройства; определения физических размеров любых объектов, находящихся вблизи устройства; определения электромагнитных свойств любых объектов, находящихся вблизи устройства, и средство для сопоставления измеренной частотной характеристики с одной из спрогнозированных частотных характеристик для определения предполагаемого местоположения устройства, причем предполагаемое местоположение устройства соответствует возможному местоположению устройства, связанному с одной спрогнозированной частотной характеристикой, которая наиболее близко соответствует измеренной частотной характеристике.
24. Устройство по п.23, дополнительно содержащее средство для определения рассеивающей или многолучевой интерференции, вызванной объектами, находящимися вблизи устройства, показателя соответствия между каждой спрогнозированной частотной характеристикой и измеренной частотной характеристикой, приблизительного местоположения устройства.
25. Транспортное средство, содержащее: устройство для радионавигации, причем устройство для радионавигации включает в себя: средство для прогнозирования частотной характеристики для каждого из множества возможных местоположений устройства; средство для измерения частотной характеристики в месте фактического местоположения устройства; средство определения местоположения любых объектов, находящихся вблизи устройства; определения физических размеров любых объектов, находящихся вблизи устройства; определения электромагнитных свойств любых объектов, находящихся вблизи устройства; и средство для сопоставления измеренной частотной характеристики с одной из спрогнозированных частотных характеристик для определения предполагаемого местоположения устройства, причем предполагаемое местоположение устройства соответствует возможному местоположению устройства, связанному с одной спрогнозированной частотной характеристикой, которая наиболее близко соответствует измеренной частотной характеристике.
26. Транспортное средство по п.25, дополнительно содержащее средство для определения рассеивающей или многолучевой интерференции, вызванной объектами, находящимися вблизи устройства, показателя соответствия между каждой спрогнозированной частотной характеристикой и измеренной частотной характеристикой.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 2006242323 A1, 26.10.2006 | |||
| WO 03101140 A1, 04.12.2003. | |||

