Область техники, к которой относится изобретение
Настоящее изобретение относится к системе круиз-контроля транспортного средства, в частности к системе адаптивного круиз-контроля, позволяющей минимизировать расход топлива в транспортном средстве во время его работы.
Уровень техники
Одним из приоритетов, учитываемых при проектировании многих существующих популярных пассажирских транспортных средств, является эффективность использования энергии. Эффективность использования энергии при выполнении транспортным средством различных маневров может быть повышена различными способами, в том числе, путем снижения расхода топлива и (или) потребления электрической энергии, зависящих от конфигурации силового агрегата транспортного средства. Однако компоновка и другие конструктивные соображения могут ограничивать возможность установки дополнительных компонентов в транспортное средство. Кроме того, популярные пассажирские транспортные средства имеют один или несколько, по крайней мере, частично автоматических или управляемых компьютером рабочих режимов, например, круиз-контроль. Хотя это затруднительно в настоящее время, предпочтительно оптимизировать потребление энергии в, по крайней мере частично, автоматическом или управляемом компьютером рабочих режимах работы транспортного средства, в таком как, круиз-контроль, используя существующие стандартные системы управления.
Раскрытие изобретения
Предложена система круиз-контроля транспортного средства, включающая в себя компьютер транспортного средства с процессором и запоминающим устройством, выполненный с возможностью:
поддерживать скорость транспортного средства в пределах первого порогового значения, соответствующего заданному значению, введенному в систему круиз-контроля;
определять, находится ли текущее значение уклона дороги в пределах первого порогового значения уклона;
регулировать заданное значение для поддержания скорости транспортного средства в пределах второго порогового значения скорости, находящегося за пределами первого порогового значения скорости;
определять, находится ли текущее значение уклона дороги в пределах второго порогового значения уклона, и
корректировать заданное значение для возврата значения скорости транспортного средства в пределы первого порогового значения скорости.
Регулировка заданного значения для поддержания скорости транспортного средства в пределах второго порогового значения скорости может включать в себя:
осуществление режима движения накатом системы круиз-контроля до тех пор, пока значение скорости движения транспортного средства находится в пределах третьего порогового значения скорости, включая выборочное переключение коробки передач транспортного средства на нейтральную передачу или выборочный запуск системы отсечки топлива в режиме замедления;
определение, находится ли текущее значение уклона за пределами второго порогового значения уклона, и
поддержание скорости транспортного средства в значении, которое находится за пределами первого порогового значения скорости.
Компьютер может быть дополнительно выполнен с возможностью изменять заданное значение в соответствии с сигналом обнаружения впереди идущего транспортного средства.
Компьютер может быть дополнительно выполнен с возможностью определять по крайней мере первое и второе пороговые значения скорости и первое и второе пороговые значения уклона в соответствии с оценочным значением эффективности использования топлива.
Компьютер может быть дополнительно выполнен с возможностью инвертировать сигнал изменения крутящего момента для регулировки заданного значения.
Компьютер может быть также выполнен с возможностью определять, находится ли спрогнозированное значение уклона дороги в пределах первого вероятностного порогового значения уклона.
Компьютер может быть также выполнен с возможностью:
определять значение крутящего момента для возврата в исходное состояние в соответствии с текущим значением уклона дороги и оценочным значением эффективности использования топлива, и
корректировать заданное значение для возврата значения скорости транспортного средства в пределы первого порогового значения скорости в соответствии крутящим моментом для возврата в исходное состояние.
Предложен способ работы системы круиз-контроля, в котором:
поддерживают скорость транспортного средства в пределах первого порогового значения, соответствующего заданному значению, введенному в систему круиз-контроля с помощью водителя или датчика переднего обзора транспортного средства;
определяют, находится ли текущее значение уклона дороги в пределах первого порогового значения уклона;
регулируют заданное значение для поддержания скорости транспортного средства в пределах второго порогового значения скорости, находящегося за пределами первого порогового значения скорости;
определяют, находится ли текущее значение уклона дороги в пределах второго порогового значения уклона, и
корректируют заданное значение для возврата значения скорости транспортного средства в пределы первого порогового значения скорости.
При регулировке заданного значения для поддержания скорости транспортного средства в пределах второго порогового значения скорости могут:
осуществлять режим движения накатом системы круиз-контроля до тех пор, пока значение скорости движения транспортного средства находится в пределах третьего порогового значения скорости;
определять, находится ли текущее значение уклона за пределами второго порогового значения уклона, и
поддерживать скорость транспортного средства в значении, которое находится за пределами первого порогового значения скорости.
При осуществлении режима движения накатом системы круиз-контроля могут переключать коробку передач транспортного средства на нейтральную передачу или запускать систему отсечки топлива в режиме замедления.
В способе могут дополнительно определять по крайней мере первое и второе пороговые значения скорости и первое и второе пороговые значения уклона в соответствии с оценочным значением эффективности использования топлива.
В способе могут дополнительно инвертировать сигнал изменения крутящего момента для регулировки заданного значения.
В способе могут дополнительно определять, находится ли спрогнозированное значение уклона в пределах первого вероятностного порогового значения уклона.
В способе могут дополнительно:
определять значение крутящего момента для возврата в исходное состояние в соответствии с текущим значением уклона дороги и оценочным значением эффективности использования топлива;
корректировать заданное значение для возврата значения скорости транспортного средства в пределы первого порогового значения скорости в соответствии крутящим моментом для возврата в исходное состояние.
Предложен энергонезависимый машиночитаемый носитель, на котором физически хранятся исполняемые компьютером инструкции, с помощью которых процессор будет выполнять следующие действия:
поддержание скорости транспортного средства в пределах первого порогового значения, соответствующего заданному значению, введенному в систему круиз-контроля;
определение, находится ли текущее значение уклона дороги в пределах первого порогового значения уклона;
осуществление режима движения накатом системы круиз-контроля в до тех пор, пока скорость движения транспортного средства находится в пределах второго порогового значения скорости;
определение, находится ли текущее значение уклона дороги за пределами второго порогового значения уклона, и
поддержание скорости движения транспортного средства в значении, которое находится за пределами первого порогового значения скорости;
регулировка заданного значения для поддержания скорости транспортного средства в пределах третьего порогового значения скорости в значении, которое находится за пределами первого порогового значения скорости;
определение, находится ли текущее значение уклона дороги в пределах второго порогового значения уклона, и
корректировка заданного значения для возврата значения скорости транспортного средства в пределы первого порогового значения скорости.
Инструкции могут касаться выполнения процессором операций, дополнительно включающих в себя изменение заданного значения в соответствии с сигналом обнаружения впереди идущего транспортного средства.
Инструкции могут касаться выполнения процессором операций, дополнительно включающих в себя определение по крайней мере первого и второго пороговых значений скорости и первого и второго пороговых значений уклона в соответствии с оценочным значением эффективности использования топлива, причем осуществление режима движения накатом системы круиз-контроля может включать в себя выборочное переключение коробки передач транспортного средства на нейтральную передачу или выборочный запуск системы отсечки топлива в режиме замедления.
Инструкции могут касаться выполнения процессором операций, дополнительно включающих в себя инвертирование сигнала изменения крутящего момента для регулировки заданного значения.
Инструкции могут касаться выполнения процессором операций, дополнительно включающих в себя определение, находится ли спрогнозированное значение уклона дороги в пределах первого вероятностного порогового значения уклона.
Инструкции могут касаться выполнения процессором операций, дополнительно включающих в себя:
определение значения крутящего момента для возврата в исходное состояние в соответствии с текущим значением уклона дороги и оценочным значением эффективности использования топлива, и
корректировку заданного значения для возврата значения скорости транспортного средства в пределы первого порогового значения скорости в соответствии крутящим моментом для возврата в исходное состояние.
Краткое описание чертежей
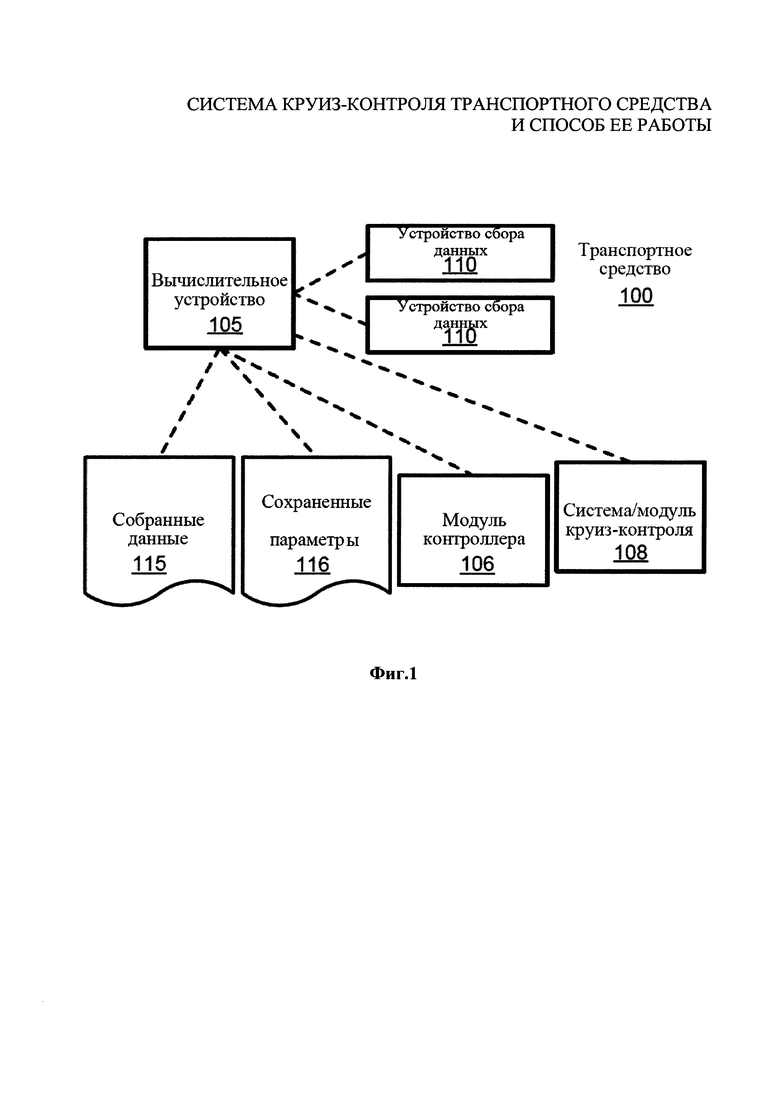
На фиг. 1 представлен пример системы транспортного средства, соответствующей настоящему изобретению.
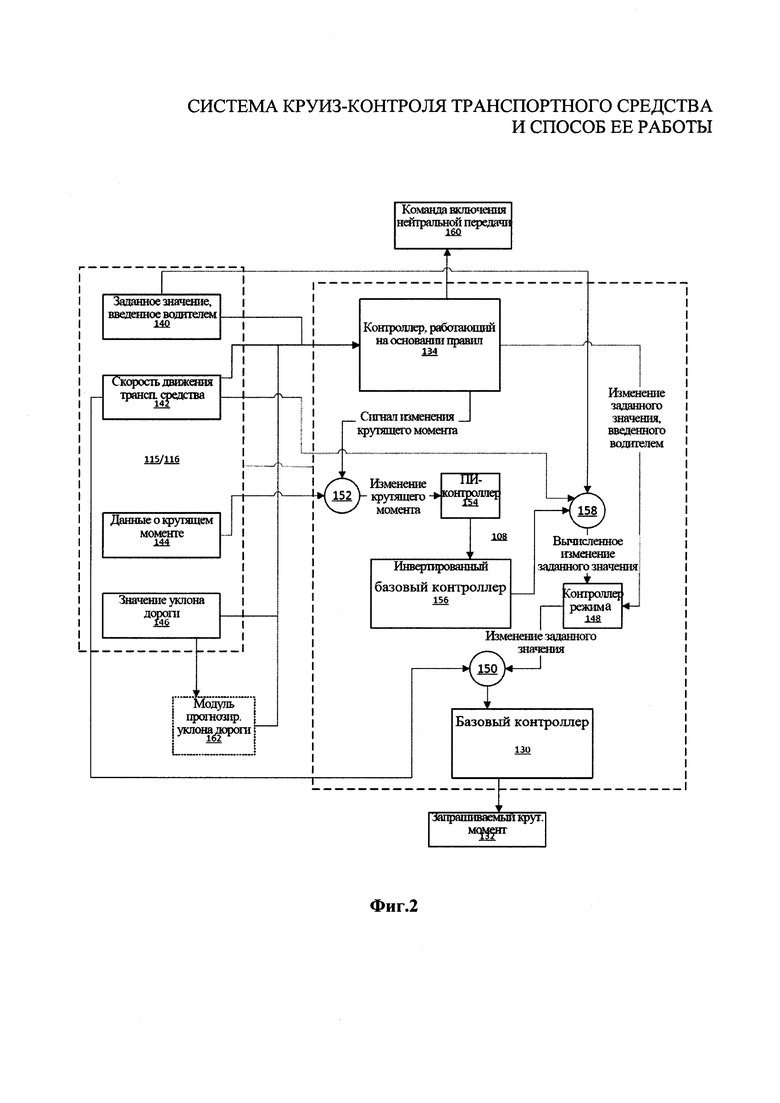
На фиг. 2 представлено схематическое изображение примера системы круиз-контроля, соответствующей настоящему изобретению.
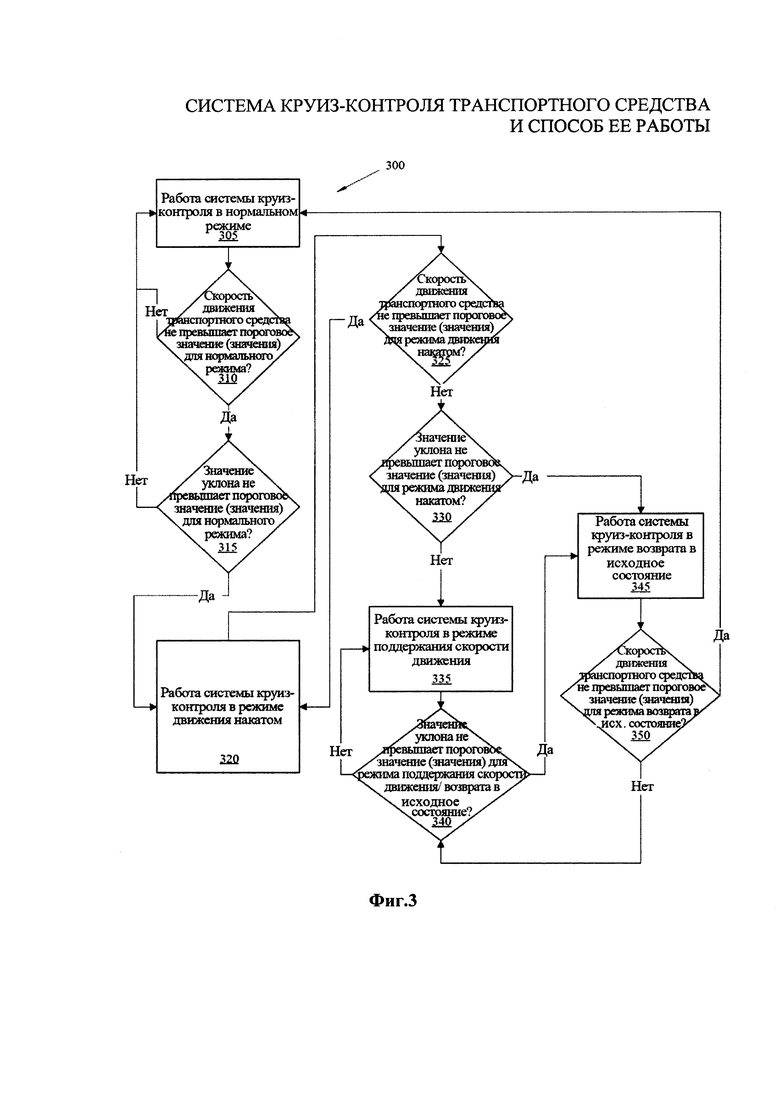
На фиг. 3 представлена блок-схема одного примера способа, осуществляемого системой круиз-контроля в соответствии с настоящим изобретением.
Осуществление изобретения
Система круиз-контроля, соответствующая настоящему изобретению, может использовать контроллер адаптивного круиз-контроля пассажирского транспортного средства для реализации отклонений от введенного водителем заданного значения с целью сведения к минимуму расхода топлива в течение определенного временного интервала в соответствии, например, со скоростью транспортного средства, уклоном дороги и введенным водителем заданным значением. Такая система круиз-контроля может включать в себя информацию о текущем (определенном или измеренном) и будущем (смоделированном или спрогнозированном) значении уклона дороги, а также об уровне комфорта пассажира, оцениваемом с помощью набора критериев, которые являются основой правил для определения момента начала и прекращения работы в режиме движения накатом, режиме поддержания скорости и режиме возврата в исходное состояние (ускорения). Кроме того, в режиме движения накатом система может быть переключена на нейтральную передачу и (или) перекрывать подачу топлива для максимального снижения расхода топлива во время замедления. Соответственно, данная система позволяет дополнительно снизить расход топлива во время работы круиз-контроля на основании существующих измерительных устройств и исполнительных механизмов транспортного средства.
Например, система круиз-контроля, способ ее работы и (или) энергонезависимый машиночитаемый носитель, на котором физически хранятся исполняемые компьютером инструкции, могут поддерживать скорость транспортного средства в пределах первого порогового значения, соответствующего заданному значению, введенному в систему круиз-контроля водителем транспортного средства или датчиком, например, радиолокационным устройством переднего обзора, и определять, находится ли текущее значение уклона в пределах первого порогового значения уклона. Заданное значение может быть отрегулировано для поддержания скорости транспортного средства в пределах второго порогового значения скорости за пределами первого порогового значения скорости. Может быть определено, что текущее значение уклона находится в пределах второго порогового значения уклона и заданное значение может быть для возврата значения скорости транспортного средства к первому пороговому значению скорости. В соответствии с некоторыми вариантами осуществления регулировка скорости транспортного средства в пределах второго порогового значения скорости с помощью системы, способа и (или) инструкций включает в себя работу режима движения накатом системы круиз-контроля в до тех пор, пока скорость транспортного средства находится в пределах третьего порогового значения скорости, определение того, что текущее значение уклона вышло за пределы второго порогового значения уклона, и поддержание скорости транспортного средства, значение которой находится за пределами первого порогового значения. Кроме того, работа режима движения накатом системы круиз-контроля в может включать в себя переключение коробки передач транспортного средства на нейтральную передачу и (или) запуск системы отсечки топлива в режиме замедления.
Для достижения дополнительной экономии топлива первое и второе пороговые значения скорости и первое и второе пороговые значения уклона могут быть определены в соответствии с оценочным значением эффективности использования топлива, целевого или расчетного значения. Для использования базового контроллера системы круиз-контроля в данной системе, способе и (или) инструкциях для корректировки заданного значения сигнал изменения крутящего момента может быть инвертирован и передан на базовый контроллер системы круиз-контроля. Система, способ и (или) инструкции также могут включать в себя спрогнозированные значения уклона и соответствующие вероятностные пороговые значения уклона.
На фиг. 1 схематически представлен пример транспортного средства 100. Транспортное средство может принимать различные формы и включать в себя дополнительные и (или) альтернативные компоненты и системы. Следует понимать, что представленные примеры компонентов не должны рассматриваться в качестве ограничений и что могут быть использованы дополнительные или альтернативные компоненты и (или) варианты применения. Например, транспортное средство 100 может представлять собой любое пассажирское или коммерческое транспортное средство, в том числе, легковой автомобиль, грузовой автомобиль, внедорожник, автобус, поезд, лодку или самолет.
Как на фиг. 1 показано, транспортное средство 100 включает в себя вычислительное устройство или компьютер 105, который, как правило, имеет процессор и запоминающее устройство, при этом запоминающее устройство включает в себя один или несколько типов машиночитаемых носителей и хранит инструкции, исполняемые процессором, для выполнения различных операций, включая операции, раскрытые в данном описании изобретения. Компьютер 105 транспортного средства 100 принимает информацию, например, собранные данные от одного или нескольких устройств 110 сбора данных о различных компонентах или условиях работы транспортного средства 100, например, о таких компонентах, как сенсорная система акселерометра, система измерения крутящего момента, тормозная система, система рулевого управления, силовой агрегат и т.д., и (или) о таких условиях, как запрашиваемый крутящий момент, скорость, ускорение, тангаж, крен, рыскание транспортного средства 100 и т.д. Кроме того, компьютер 105 может включать в себя несколько вычислительных устройств, например, контроллеров или других аналогичных устройств, установленных в транспортном средстве 101 для контроля и (или) управления различными компонентами транспортного средства, например, модулем 106 контроллера, системой круиз-контроля или модулем 108, блоком управления двигателем (ECU), блоком управления коробкой передач (TCU) и т.д. Компьютер 105, как правило, выполнен с возможностью обмена данными с помощью шины локальной сети контроллеров (CAN) или ее аналога. Компьютер также может быть соединен с системой бортовой диагностики (OBD-II). С помощью CAN-шины, OBD-II и (или) других проводных или беспроводных систем компьютер может передавать сообщения на различные устройства в транспортном средстве и (или) получать сообщения от различных устройств, например, от контроллеров, исполнительных механизмов, датчиков и т.д. В качестве альтернативы или дополнения в случаях, когда компьютер 105 включает в себя несколько устройств, CAN-шина или ее аналог может быть использована для обмена данными между несколькими устройствами, являющимися частью компьютера. Кроме того, компьютер может быть выполнен с возможностью обмена данными с сетью, которая может использовать различные проводные и (или) беспроводные сетевые протоколы, например, сотовую связь, Bluetooth, проводные и (или) беспроводные сети с коммутацией пакетов и т.д.
Модуль 106 контроллера, как правило, входит в состав сохраненных инструкций, исполняемых компьютером 105. С помощью данных, полученных компьютером 105, например, данных от устройств 110 сбора данных, данных, определенных на основании сохраненных значений параметров 116, и т.д., модуль 106 может управлять различными системами или оборудованием транспортного средства 100. Например, модуль 106 может быть использован для ускорения, замедления или поддержания постоянной скорости транспортного средства 100, которые могут выполняться во взаимосвязи с запросом крутящего момента от системы 108 круиз-контроля транспортного средства 100.
Устройства 110 сбора данных могут включать в себя различные устройства. Например, различные контроллеры в транспортном средстве могут выполнять функции устройств 110 сбора данных, которые передают данные 115 по CAN-шине, например, данные 115 о запрашиваемом или эффективном крутящем моменте, скорости, ускорении транспортного средства, уклоне дороги и т.д. Кроме того, в транспортном средстве могут быть установлены датчики или другие аналогичные устройства, оборудование глобальной системы позиционирования (GPS) и т.д., которые могут работать как устройства 110 сбора данных и передавать данные непосредственно на компьютер 105, например, по проводному или беспроводному каналу связи. Сенсорные устройства 110 сбора данных могут включать в себя коммуникационные устройства, обеспечивающие передачу и прием информации от других транспортных средств, в частности, информации о планируемых траекториях движения транспортных средств, окружающих транспортное средство 100. Сенсорные устройства 110 сбора данных могут представлять собой такие механизмы, как радиолокационные устройства, лидары, сонары и другие датчики, которые могут быть установлены для измерения расстояния между транспортным средством 100 и другими транспортными средствами или объектами и (или) их скоростей движения. Другие сенсорные устройства 110 сбора данных могут представлять собой датчики акселерометра. Более того, устройства 110 сбора данных могут представлять собой датчики для определения положения, величины изменения положения, скорости изменения положения компонентов транспортного средства 100 и т.д., например, рулевого колеса, педали тормоза, педали газа, рычага переключения передач и т.д.
На запоминающем устройстве компьютера 105, как правило, хранятся собранные данные 115. Собранные данные 115 могут представлять собой различные полученные данные о транспортном средстве 100. Помимо данных 115, указанных выше, в качестве примера можно привести данные 115, собранные с помощью одного или нескольких устройств 110 сбора данных, а также полученные с их помощью расчетные данные, хранящиеся в компьютере 105. В общем случае собранные данные 115 могут представлять собой данные, которые могут быть получены устройством 110 сбора данных и (или) вычислены на основании таких данных. Соответственно, собранные данные 115 могут включать в себя данные о выполняемых операциях и (или) рабочих характеристиках транспортного средства 100, данные, принятые от другого транспортного средства, а также данные об условиях окружающей среды, дорожных условиях и других условиях, влияющих на работу транспортного средства 100. Например, собранные данные 115 могут включать в себя данные о запрашиваемом крутящем моменте, измеренном или определенном крутящем моменте, местоположении, скорости, ускорении, тангаже, крене, рыскании, торможении транспортного средства 100, наличии или отсутствии осадков, давлении в шинах, состоянии шин и т.д.
На запоминающем устройстве компьютера 105 также могут храниться параметры 116. Параметр 116 обычно регулирует управление системой или компонентом транспортного средства 100. Данные параметры могут изменяться в соответствии с условиями окружающей среды, состоянием дороги, состоянием транспортного средства 100, режимом работы или состоянием системы транспортного средства 100 и т.д. Например, параметр 116 может специфицировать пороговые значения скорости и уклона дороги для одного или нескольких режимов системы 108 круиз-контроля и состояний транспортного средства 100. Данные параметры 116 также могут быть сохранены и обновлены компьютером 105.
На фиг. 2 представлен пример системы 108 круиз-контроля, соответствующей настоящему изобретению и включающей в себя базовый контроллер 130, который передает запрос крутящего момента, что схематично изображено в виде блока 132, например, на компьютер 105 и (или) контроллер 106 транспортного средства 100. Система 108 круиз-контроля также включает в себя контроллер 134, работающий на основании правил, который определяет величину крутящего момента, необходимого для обеспечения особенно предпочтительного уровня производительности, например, для обеспечения работы в соответствии с определенными данными 115 и (или) параметрами 116 для оптимизации расхода топлива. В соответствии с одним вариантом осуществления контроллер 134, работающий на основании правил, может использовать следующие данные, полученные на основании собранных данных 115, которые изображены в виде блоков 140, 142, 144, 146, соответственно: введенное водителем заданное значение, скорость транспортного средства, уклон дороги и данные крутящего момента.
Следует понимать, что базовый контроллер 130 может представлять собой стандартный контроллер круиз-контроля для существующих популярных пассажирских транспортных средств, который регулирует запрашиваемый крутящий момент на основании скорости транспортного средства и команд от водителя. Установка базового контроллера 130 в систему 108 круиз-контроля, соответствующую настоящему изобретению, позволяет обеспечить несколько рабочих режимов, включая нормальный режим, в котором контроллер 148 режима подключает контроллер 134, работающий на основании правил, к базовому контроллеру 130, после чего контроллер 134, работающий на основании правил, передает любое изменение во введенном водителем заданном значении 140 в блок 150. В блоке 150 может быть обнаружено любое различие между введенным водителем заданным значением 140 и значением скорости 142 транспортного средства, после чего базовый контроллер 130 может внести соответствующие корректировки в запрашиваемый крутящий момент 132.
В соответствии с настоящим изобретением в других режимах работы системы 108 круиз-контроля, например, в режиме движения накатом, поддержания скорости и возврата в исходное состояние, контроллер 148 режима соединяет компоненты обработки сигналов или компоненты контроллера между контроллером 134, работающим на основании правил, и базовым контроллером 130, при этом контроллер 134, работающий на основании правил, передает сигнал управления крутящим моментом на такие компоненты и, в конечном итоге, на базовый контроллер 130. В соответствии с одним вариантом осуществления, используя сигнал управления крутящим моментом от контроллера 134, работающего на основании правил, и данные 144 о крутящем моменте, в блоке 152 определяется величина изменения крутящего момента для транспортного средства 100.
Величина изменения крутящего момента, определенная на этапе 152, может быть преобразована в сигнал управления крутящим моментом с помощью пропорционально-интегрального (ПИ) контроллера 154. В свою очередь, сигнал управления крутящим моментом также может быть преобразован в сигнал изменения заданного значения с помощью инвертирования сигнала базового контроллера 156. В соответствии с настоящим изобретением инвертированный базовый контроллер 156 преобразует сигнал управления крутящим моментом от ПИ контроллера 154 в вычисленное заданное значение для базового контроллера 130 на основании рабочих параметров базового контроллера 130 для разрешенного выполнения регулировки крутящего момента, определенного контроллером 134, работающим на основании правил, с помощью базового контроллера 130 так же, как и при внесении изменений в значение, заданное водителем транспортного средства 100. В частности, в блоке 158 вычисленное изменение заданного значения может быть определено с помощью вычисленного заданного значения и скорости 142 движения транспортного средства. Контроллер 148 режима определяет вычисленное изменение заданного значения в блоке 150 так же, как определяет изменение заданного значения, введенного водителем, во время нормального режима системы 108 круиз-контроля. Таким образом, система 108 круиз-контроля может использовать базовый контроллер 130 для реализации отклонения от введенного водителем заданного значения, определенного контроллером 134, работающим на основании правил, данные отклонения могут быть основаны, например, на значении скорости транспортного средства, значении уклона дороги и введенном водителем заданном значении, и могут позволять достичь определенных целевых показателей эффективности, например, сведения к минимуму расхода топлива в течение заданного периода времени.
В соответствии с некоторыми вариантами осуществления контроллер 134, работающий на основании правил, может быть подключен к контроллеру 106 транспортного средства 100 для выдачи команды включения нейтральной передачи, с помощью которой транспортное средство 100 переключается на нейтральную передачу, которая схематически обозначена блоком 160. Например, в режиме движения накатом контроллер 134, работающий на основании правил, может определить, что транспортное средство 100 способно наиболее эффективно двигаться в течение следующего периода времени с коробкой передач, находящейся в нейтральном положении, при этом работа может выполняться без использования стандартного модуля нормального режима работы системы круиз-контроля. На основании определения системы 108 круиз-контроля, что режим движения накатом должен смениться на режим поддержания скорости или режим возврата в исходное состояние, сигнал управления крутящим моментом от контроллера 134, работающего на основании правил, инициирует включение передачи транспортного средства 100.
Следует понимать, что блоки 150, 152 и 158 могут представлять собой независимое аппаратное обеспечение системы 108 круиз-контроля или могут являться частью одного из других компонентов системы 108 круиз-контроля или транспортного средства 100, например, базового контроллера 130, контроллера 134, работающего на основании правил, контроллера 148 режима и инвертированного базового контроллера 156.
В соответствии с некоторыми вариантами осуществления система 108 круиз-контроля, компьютер 105 или контроллер 106 могут включать в себя модуль 162 прогнозирования уклона дороги. В качестве примера технологии прогнозирования уклона дороги, которая может быть использована модулем 162 прогнозирования уклона дороги для определения вероятностной информации об уклоне относительно горизонта транспортного средства 100, можно указать марковское моделирование и (или) прогностические способы моделирования, т.е. рекурсивно обновляемые динамические модели (RLS). Вероятностная информация об уклоне и соответствующие пороговые значения, например, для нормального режима, режима движения накатом, режима поддержания скорости и режима возврата в исходное состояние системы 108 круиз-контроля, могут быть сохранены среди параметров 116. В соответствии с вариантами осуществления, в которых информации о прогнозируемом уклоне просто нет или в которых она недоступна по другой причине, данная информация может быть просто записана, например, все вероятностные показатели могут быть установлены на определенное значение (например, 1 или 100%).
Для изменения заданного значения 140, введенного водителем (или целевой скорости), система 108 круиз-контроля также может использовать сигнал радиолокационного устройства переднего обзора из сохраненных данных 115. Другими словами, транспортное средство 100 может обнаруживать другое движущееся впереди транспортное средство и изменять целевую скорость движения таким образом, чтобы поддерживать безопасную дистанцию.
Для оптимизации работы системы 108 круиз-контроля, например, с точки зрения экономии топлива, компьютер 105, контроллер 106 и (или) система 108 круиз-контроля могут определять пороговые значения скорости транспортного средства, уклона дороги и (или) спрогнозированного уклона дороги для каждого режима работы системы 108 круиз-контроля, используя генетические алгоритмы, модели чувствительности (обновления в режиме реального времени), динамическое программирование, стохастическое динамическое программирование, опыт пользователя и (или) марковские процессы принятия решения и т.д. В соответствии с некоторыми вариантами осуществления могут быть использованы другие способы оптимизации смоделированных данных, результаты которых также могут быть подтверждены в транспортном средстве. Пороговые значения для скорости транспортного средства, уклона дороги и (или) спрогнозированного уклона дороги для нормального режима, режима движения накатом, режима поддержания скорости и режима возврата в исходное состояние могут быть сохранены среди параметров 116 и могут динамически изменяться или обновляться в соответствии с условиями работы транспортного средства 100, в том числе, в соответствии со скоростью движения транспортного средства, наличием или отсутствием осадков, уровнем наружной освещенности и т.д.
В общем случае такие вычислительные системы и (или) устройства, как компьютер 105, модуль 106 контроллера и (или) компоненты системы 108 круиз-контроля транспортного средства 100, могут использовать операционную систему, включая, но не ограничиваясь этим, версии и (или) разновидности операционной системы Ford SYNC®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой компанией Oracle Corporation, г. Редвуд Шорз, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines, г. Армонк, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc., г. Купертино, Калифорния, и операционной системы Android, разработанной компанией Open Handset Alliance. Примеры вычислительных устройств включают в себя, не ограничиваясь этим, компьютер или блок управления транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный компьютер или карманный компьютер или некоторые другие вычислительные систему и (или) устройство.
В общем случае вычислительные устройства могут включать в себя машиночитаемые инструкции, при этом данные инструкции могут быть выполнены одним или несколькими процессорами, например, процессорами, описанными выше. Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и (или) технологий программирования, включая, но не ограничиваясь этим, языки Java, С, С++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор (например, микропроцессор) принимает инструкции, например, от запоминающего устройства или машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым, реализуя один или несколько процессов, к которым относится один или несколько процессов из настоящего описания. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (сюда также относятся носители, читаемые процессором) может представлять собой любой энергонезависимый носитель (например, материальный носитель), предоставляющий данные (например, инструкции), которые могут быть обработаны компьютером (например, процессором компьютера). Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основным запоминающим устройством. Такие инструкции могут быть переданы с помощью одного или нескольких средств передачи данных, например, с помощью коаксиальных кабелей, медных кабелей и оптоволоконных кабелей, включающих в себя провода, которые являются частью системной шины, соединенной с процессором компьютера. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
Базы данных, архивы или другие описанные хранилища данных могут включать в себя различные механизмы для хранения, доступа и чтения различных данных, например, иерархические базы данных, наборы файлов в файловой системе, базы данных приложения в соответствующем формате, реляционные системы управления базами данных (RDBMS) и т.д. Каждое такое хранилище данных обычно встроено в вычислительное устройство с операционной системой, например, в одну из указанных выше систем, а доступ к ним осуществляется через сеть одним или несколькими любыми из существующих способов. Доступ к файловой системе может быть выполнен из операционной системы, при этом такая система может поддерживать различные форматы файлов. RDBMS обычно использует язык структурированных запросов (SQL) вместе с языком создания, хранения, редактирования и выполнения сохраненных процедур.
В некоторых вариантах осуществления изобретения элементы системы могут представлять собой машиночитаемые инструкции (например, программное обеспечение) на одном или нескольких компьютерных устройствах (например, серверах, персональных компьютерах и т.д.) и могут храниться на соответствующем машиночитаемом носителе (например, дисках, запоминающих устройствах и т.д.). Компьютерная программа может состоять из таких инструкций, сохраненных на машиночитаемом носителе, для выполнения описанных функций.
На фиг. 3 представлена блок-схема примера способа 300, который может быть выполнен компьютером 105, модулем 106 контроллера и системой 108 круиз-контроля транспортного средства 100 для использования системы 108 круиз-контроля.
Способ начинается на этапе 305, на котором водитель активирует систему 108 круиз-контроля и вводит начальное заданное значение. На этапе 310 система 108 круиз-контроля работает в нормальном режиме для установки скорости транспортного средства 100 в начальное заданное значение или в значение, находящееся в пределах пороговых значений скорости для нормального режима работы, сохраненных среди параметров 116, относительно заданного значения, введенного водителем. Когда транспортное средство 100 достигает достаточной скорости относительно заданного значения, введенного водителем, и пороговых значений скорости для нормального режима, способ 300 переходит на этап 315, на котором способ определяет, движется ли транспортное средство по дороге, уклон которой находится в пределах пороговых значений для нормального режима, сохраненных среди параметров 116. Например, когда транспортное средство 100 включает в себя модуль 162 прогнозирования уклона дороги, пороговые значения уклона для нормального режима могут включать в себя пороговое значение для текущего измеренного уклона и вероятностное пороговое значение для определения вероятности того, что спрогнозированное значение уклона на следующем участке маршрута также, скорее всего, будет находиться в пределах порогового значения уклона. Если нет, способ 300 возвращается на этап 305, а транспортное средство 100 управляется системой 108 круиз-контроля в нормальном режиме до тех пор, пока не будут достигнуты достаточные значения скорости и уклона дороги.
Если на этапе 315 пороговые значения уклона для нормального режима будут приемлемыми, способ 300 перейдет на этап 320, на котором система 108 круиз-контроля транспортного средства 100 будет работать в режиме движения накатом. Что касается этапа 325, система 108 круиз-контроля будет оставаться в режиме движения накатом до тех пор, пока транспортное средство 100 будет двигаться со скоростью, в пределах пороговых значений скорости для движения накатом, сохраненных среди параметров 116. В соответствии с некоторыми вариантами осуществления пороговые значения скорости для режима движения накатом будут больше пороговых значений скорости для нормального режима. Например, в режиме движения накатом, в том числе, при движении транспортного средства 100 вниз по склону, передача крутящего момента от двигателя для поддержания скорости транспортного средства 100 в пределах пороговых значений скорости для режима движения накатом может не производиться. Более того, пороговые значения могут быть больше значений, обычно используемых базовым контроллером 130. Использование относительно большого допуска для отклонения скорости позволяет транспортному средству 100 максимально увеличить экономию топлива в режиме движения накатом. Как было сказано выше, в соответствии с некоторыми вариантами осуществления для переключения транспортного средства 100 на нейтральную передачу в режиме движения накатом контроллер 134, работающий на основании правил, может обмениваться данными непосредственно с контроллером 106 транспортного средства 100.
Что касается этапа 330, если в режиме движения накатом скорость движения транспортного средства 100 достигает значения, находящегося за пределами пороговых значений скорости для режима движения накатом, способ 300 определяет, находится ли значение уклона дороги, по которой движется транспортное средство 100, в пределах пороговых значений уклона для режима движения накатом, сохраненных среди параметров 116. Например, когда транспортное средство 100 включает в себя модуль 162 прогнозирования уклона дороги, пороговые значения уклона для режима движения накатом могут включать в себя пороговое значение для текущего измеренного уклона и вероятностное пороговое значение для определения вероятности того, что спрогнозированное значение уклона на следующем участке маршрута также, скорее всего, будет находиться в пределах порогового значения уклона.
Если на этапе 335 будет определено, что значение уклона дороги, по которой движется транспортное средство 100, находится за пределами пороговых значений уклона для режима движения накатом, например, если транспортное средство 100 движется вверх по достаточно крутому холму в соответствии с пороговыми значениями уклона дороги для режима движения накатом система 108 круиз-контроля управляет транспортным средством 100 в режиме поддержания скорости. Для перехода в режим поддержания скорости транспортное средство 100 увеличивает скорость движения до уровня, превышающего пороговые значения скорости для режима движения накатом и превышающего в соответствии с некоторыми вариантами осуществления пороговые значения скорости для нормального режима. Вместо увеличения скорости транспортного средства 100 до значения, близкого к заданному значению, введенному водителем, система 108 круиз-контроля поддерживает постоянную скорость движения транспортного средства 100 до тех пор, пока значение уклона дороги не потребует эффективного ускорения. Другими словами, на этапе 340, на котором система 108 круиз-контроля находится в режиме поддержания скорости, она остается в режиме поддержания скорости до тех пор, пока способ 300 не определит, что значение уклона дороги, по которой движется транспортное средство 100, находится в пределах пороговых значений уклона дороги для режима поддержания скорости.
Когда транспортное средство 100 обнаруживает, что уклон следующего участка находится в пределах пороговых значений уклона дороги для режима поддержания скорости, способ 300 переходит на этап 345, а система 108 круиз-контроля начинает управлять транспортным средством в режиме возврата в исходное состояние. Затем на этапе 350 способ 300 определяет, движется ли транспортное средство 100 со скоростью, значение которой находится в пределах пороговых значений скорости для режима возврата в исходное состояние, т.е. определяет, достигла ли скорость движения транспортного средства 100 заданного значения, введенного водителем. При получении положительного ответа способ 300 возвращается на этап 305, а система 108 круиз-контроля возвращается в нормальный режим работы. Если на этапе 350 будет определено, что скорость движения транспортного средства 100 не находится в пределах пороговых значений скорости для режима возврата в исходное состояние, способ 300 возвращается на этап 340. Если значение уклона дороги, по которой движется транспортное средство, находится в пределах пороговых значений уклона для режима возврата в исходное состояние, система 108 круиз-контроля продолжает управлять транспортным средством в режиме возврата в исходное состояние. Если нет, способ 300 возвращается на этап 335, а система 108 круиз-контроля возвращается к управлению транспортным средством 100 в режиме поддержания скорости, как было описано выше.
Режим возврата в исходное состояние системы 108 круиз-контроля является единственным режимом, в котором требуемый крутящий момент больше, чем значение, используемое базовым контроллером 130. Следовательно, чем более эффективно используется режим возврата в исходное состояние, тем более эффективно работает система 108 круиз-контроля. Наиболее эффективный крутящий момент для увеличения скорости до нормального уровня зависит от уклона дороги, при этом соотношение между данными величинами может быть определено и (или) смоделировано экспериментальным путем. В соответствии с одним вариантом осуществления значения соотношений, полученные экспериментальным путем, могут быть сохранены в транспортном средстве 100, например, среди параметров 116, и могут быть обновлены в режиме реального времени, например, с помощью компьютера 105. Зная данные значения, во время работы системы 108 круиз-контроля в режиме возврата в исходное состояние можно выбрать оптимальное значение крутящего момента для возврата в исходное состояние, основанное на полученном/измеренном значении уклона дороги.
В соответствии с другим вариантом осуществления, когда система 108 круиз-контроля работает в режиме возврата в исходное состояние, значение крутящего момента для возврата в исходное состояние может быть выбрано в соответствии с моделью, используемой прогностическим контроллером. Для определения оптимального изменения крутящего момента с целью достижения максимальной экономии топлива такой прогностический контроллер может использовать модель транспортного средства, например, адаптивную модель. Данный прогностический контроллер позволяет определить изменение крутящего момента для минимального расхода топлива с учетом минимального расстояния до впереди идущего транспортного средства, отклонение от заданного значения, введенного водителем, и максимальный крутящий момент, предотвращающий разблокировку преобразователя крутящего момента (если он установлен в транспортном средстве 100).
В соответствии с вариантами осуществления, в которых транспортное средство 100 включает в себя модуль 162 прогнозирования уклона дороги, система 108 круиз-контроля, соответствующая настоящему изобретению, поддерживает нормальный режим работы в следующих случаях: (1) если текущее значение уклона дороги выше, чем максимальное значение уклона для перехода из нормального режима работы, (2) если разность между значением скорости транспортного средства и заданным значением, введенным водителем, выше, чем приемлемое пороговое значение отклонения, или (3) если вероятность того, что среднее значение уклона относительно горизонта меньше или равно максимальному спрогнозированному среднему значению уклона дороги для перехода из нормального режима, меньше порогового значения вероятности нормального режима для максимального спрогнозированного среднего значения уклона дороги, которое может быть определено модулем 162 прогнозирования уклона дороги. Система 108 круиз-контроля переходит из нормального режима работы в режим движения накатом в следующих случаях: (1) если текущее значение уклона дороги меньше или равно максимальному значению уклона дороги для перехода из нормального режима, (2) если разность между значением скорости транспортного средства и заданным значением меньше или равна приемлемому пороговому значению отклонения, и (3) если вероятность того, что среднее значение уклона относительно горизонта меньше или равно максимальному спрогнозированному среднему значению уклона для перехода из нормального режима, больше или равна пороговому значению вероятности нормального режима для максимального спрогнозированного среднего значения уклона.
После перехода в режим движения накатом система 108 круиз-контроля может поддерживать режим движения накатом или перейти в режим поддержания скорости или режим возврата в исходное состояние. Система 108 круиз-контроля поддерживает режим движения накатом в том случае, когда разность между значением скорости транспортного средства и заданным значением, введенным водителем, меньше максимального порогового значения отклонения. В соответствии с настоящим изобретением максимальное увеличение времени работы в режиме движения накатом при заданном пороговом значении отклонения скорости для режима движения накатом также позволяет максимизировать экономию топлива. Таким образом, в некоторых случаях во время движения накатом коробка передач может быть переключена на нейтральную передачу и (или) может быть включена система DFSO (система отсечки топлива в режиме замедления), если транспортное средство оборудовано таковой. Переключение на нейтральную передачу позволяет свести к минимуму торможение из-за силового агрегата, что увеличивает длительность работы в режиме движения накатом, при этом система отсечки топлива в режиме замедления сводит к минимуму расход топлива в данном режиме до тех пор, пока остается достаточно времени для компенсации количества топлива, необходимого для перезапуска системы отсечки топлива в режиме замедления.
Система 108 круиз-контроля переходит из режима движения накатом в режим поддержания скорости в следующих случаях: (1) если текущее значение уклона дороги больше максимального значения уклона для перехода из режима движения накатом, и (2) если разность между значением скорости транспортного средства и заданным значением, введенным водителем, больше или равна максимальному пороговому значению отклонения. Система 108 круиз-контроля также переходит из режима движения накатом в режим поддержания скорости в следующих случаях: (1) если разность между значением скорости транспортного средства и заданным значением, введенным водителем, больше или равна максимальному пороговому значению отклонения, и (2) если вероятность того, что среднее значение уклона относительно горизонта меньше или равно максимальному спрогнозированному среднему значению уклона для перехода из режима движения накатом, меньше порогового значения вероятности работы в режиме движения накатом для максимального спрогнозированного среднего значения уклона.
Система 108 круиз-контроля переходит из режима движения накатом в режим возврата в исходное состояние в следующих случаях: (1) если текущее значение уклона дороги меньше или равно максимальному значению уклона дороги для режима движения накатом, (2) если разность между значением скорости транспортного средства и заданным значением, введенным водителем, больше или равна максимальному пороговому значению отклонения, и (3) если вероятность того, что среднее значение уклона относительно горизонта меньше или равно максимальному спрогнозированному значению уклона для режима движения накатом, больше или равна пороговому значению вероятности работы в режиме движения накатом для максимального спрогнозированного среднего значения уклона.
В режиме поддержания скорости система 108 круиз-контроля может остаться в данном режиме или перейти в режим возврата в исходное состояние. Система 108 круиз-контроля переходит из режима поддержания скорости в режим возврата в исходное состояние в следующих случаях: (1) если текущее значение уклона дороги меньше максимального значения уклона для перехода из режима поддержания скорости, и (2) если вероятность того, что среднее значение уклона относительно горизонта меньше или равно максимальному спрогнозированному среднему значению уклона дороги для перехода из режима поддержания скорости, больше или равна пороговому значению вероятности работы в режиме поддержания скорости для максимального спрогнозированного среднего значения уклона.
Система 108 круиз-контроля остается в режиме поддержания скорости в следующих случаях: (1) если текущее значение уклона дороги больше или равно максимальному значению уклона для перехода из режима поддержания скорости, или (2) если вероятность того, что среднее значение уклона относительно горизонта меньше или равно максимальному спрогнозированному среднему значению уклона для перехода из режима поддержания скорости, меньше порогового значения вероятности работы в режиме поддержания скорости для максимального спрогнозированного среднего значения уклона.
В режиме возврата в исходное состояние система 108 круиз-контроля может оставаться в режиме возврата в исходное состояние или может перейти в нормальный режим или режим поддержания скорости. Система 108 круиз-контроля поддерживает режим возврата в исходное состояние в следующих случаях: (1) если разность между значением скорости транспортного средства и заданным значением, введенным водителем, больше или равна приемлемому пороговому значению отклонения, (2) если текущее значение уклона дороги меньше максимального значения уклона для перехода из режима возврата в исходное состояние, и (3) если вероятность того, что среднее значение уклона относительно горизонта меньше или равно максимальному спрогнозированному среднему значению уклона дороги для перехода из режима возврата в исходное состояние, больше или равна пороговому значению вероятности работы в режиме возврата в исходное состояние для максимального спрогнозированного среднего значения уклона. Система 108 круиз-контроля переходит из режима возврата в исходное состояние в режим поддержания скорости в следующих случаях: (1) если разность между значением скорости транспортного средства и заданным значением больше или равна приемлемому пороговому значению отклонения, (2) если текущее значение уклона дороги больше или равно максимальному значению уклона для перехода из режима возврата в исходное состояние, и (3) если вероятность того, что среднее значение уклона относительно горизонта меньше или равно максимальному спрогнозированному среднему значению уклона для перехода из режима возврата в исходное состояние, меньше порогового значения вероятности работы в режиме возврата в исходное состояние для максимального спрогнозированного среднего значения уклона.
Система 108 круиз-контроля переходит из режима возврата в исходное состояние в нормальный режим работы, если разность между значением скорости транспортного средства и заданным значением меньше приемлемого порогового значения отклонения, т.е. если транспортное средство 100 достигает исходной скорости.
Что касается описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, такие процессы могут быть выполнены с использованием другой последовательности данных этапов. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а некоторые этапы могут быть добавлены или исключены. Другими словами, описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не могут рассматриваться как ограничение формулы изобретения.
Таким образом, следует понимать, что описание приведено выше в целях наглядности, а не ограничения. Многие варианты осуществления и способы применения, отличные от указанных примеров, станут очевидными после ознакомления с вышеприведенным описанием. Объем изобретения должен определяться не на основании приведенного выше описания, а на основании прилагаемой формулы изобретения вместе со всеми эквивалентами, указанными в данной формуле изобретения. Можно предположить и ожидать будущего развития технологий, упомянутых в данном описании изобретения, а также того, что раскрытые системы и способы будут включены в подобные будущие варианты осуществления изобретения. Таким образом, следует понимать, что применение изобретения может быть изменено и скорректировано.
Все термины, используемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в области технологий, упоминаемых в данном описании изобретения, если иное явно не указано в настоящем документе. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле изобретения не указано иное.
Реферат данного изобретения приведен для того, чтобы читатель мог получить общее представление о технической составляющей изобретения. Следует понимать, что представленный реферат не может быть использован для истолкования или ограничения объема или смысла формулы данного изобретения. Кроме того, в вышеизложенном подробном описании указано, что различные отличительные особенности сгруппированы вместе в различных вариантах осуществления с целью упорядочения раскрытия данного изобретения. Данный способ раскрытия не подразумевает того, что заявленные варианты осуществления настоящего изобретения должны иметь больше отличительных особенностей, чем указано в каждом пункте формулы изобретения. Напротив, как указано в следующей формуле изобретения, объект изобретения основан не на всех отличительных особенностях одного раскрытого варианта осуществления изобретения. Таким образом, приведенная ниже формула изобретения является частью подробного описания, при этом каждый пункт формулы представляет собой отдельно заявленный объект изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ КРУИЗ-КОНТРОЛЯ | 2017 |
|
RU2748955C2 |
| УПРАВЛЕНИЕ СИЛОВЫМ АГРЕГАТОМ НА ОСНОВАНИИ СНИЖЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ И ТОРМОЗНОЙ СПОСОБНОСТИ | 2017 |
|
RU2688567C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |
| СПОСОБ И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2570855C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ РЕГЕНЕРАЦИИ БЕНЗИНОВОГО САЖЕВОГО ФИЛЬТРА | 2016 |
|
RU2689256C2 |
| МОДУЛЬ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2493025C2 |
| СПОСОБ И СИСТЕМА ВОЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2514610C2 |
| МОДУЛЬ И СПОСОБ, ОТНОСЯЩИЕСЯ К ВЫБОРУ РЕЖИМА ПРИ ОПРЕДЕЛЕНИИ ЗНАЧЕНИЙ КОНТРОЛЬНОЙ ТОЧКИ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556829C2 |
| ЭКОНОМИЧНАЯ СИСТЕМА КРУИЗ-КОНТРОЛЯ | 2013 |
|
RU2637564C2 |
Изобретение относится к вспомогательным системам автомобиля. Система круиз-контроля транспортного средства содержит компьютер в транспортном средстве. Компьютер содержит процессор и запоминающее устройство и выполнен с возможностью управлять скоростью транспортного средства в пределах первого порогового значения скорости в соответствии с заданным значением, введенным в систему круиз-контроля, определять, находится ли текущее значение уклона в пределах первого порогового значения уклона, регулировать заданное значение для управления скоростью транспортного средства в пределах второго порогового значения скорости, находящегося за пределами первого порогового значения скорости, определять, находится ли текущее значение уклона в пределах второго порогового значения уклона, и регулировать заданное значение для возврата скорости транспортного средства в пределы первого порогового значения скорости. Достигается повышение безопасности управления транспортным средством. 3 н. и 17 з.п. ф-лы, 3 ил.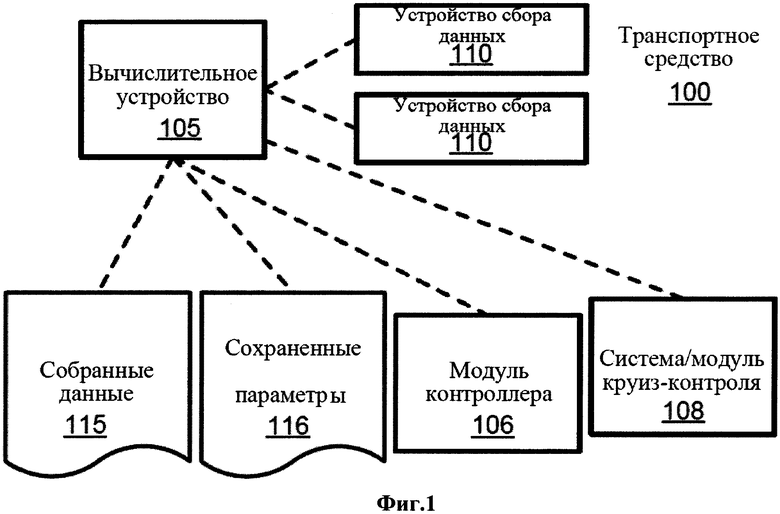
1. Система круиз-контроля транспортного средства, включающая в себя компьютер в транспортном средстве, причем упомянутый компьютер содержит процессор и запоминающее устройство, при этом упомянутый компьютер выполнен с возможностью:
управлять скоростью транспортного средства в пределах первого порогового значения скорости в соответствии с заданным значением, введенным в систему круиз-контроля;
определять, находится ли текущее значение уклона в пределах первого порогового значения уклона;
регулировать заданное значение для управления скоростью транспортного средства в пределах второго порогового значения скорости, находящегося за пределами первого порогового значения скорости;
определять, находится ли текущее значение уклона в пределах второго порогового значения уклона, и
регулировать заданное значение для возврата скорости транспортного средства в пределы первого порогового значения скорости.
2. Система по п. 1, в которой регулировка заданного значения для управления скоростью транспортного средства в пределах второго порогового значения скорости включает в себя:
осуществление режима движения накатом системы круиз-контроля до тех пор, пока скорость транспортного средства находится в пределах третьего порогового значения скорости, включая одно из выборочного переключение коробки передач транспортного средства на нейтральную передачу и выборочного запуска отсечки топлива в режиме замедления;
определение, находится ли текущее значение уклона за пределами второго порогового значения уклона, и
поддержание скорости транспортного средства за пределами первого порогового значения скорости.
3. Система по п. 1, в которой компьютер дополнительно выполнен с возможностью
изменять заданное значение в соответствии с сигналом обнаружения впереди идущего транспортного средства.
4. Система по п. 1, в которой компьютер дополнительно выполнен с возможностью
определять по меньшей мере первое и второе пороговые значения скорости и первое и второе пороговые значения уклона в соответствии с рабочей характеристикой эффективности использования топлива.
5. Система по п. 1, в которой компьютер дополнительно выполнен с возможностью
инвертировать сигнал изменения крутящего момента для регулировки заданного значения.
6. Система по п. 1, в которой первое пороговое значение уклона является первым вероятностным пороговым значением уклона.
7. Система по п. 1, в которой компьютер дополнительно выполнен с возможностью:
определять крутящий момент для возврата в соответствии с текущим уклоном дороги и рабочей характеристикой эффективности использования топлива, и
регулировать заданное значение для возврата скорости транспортного средства в пределы первого порогового значения скорости в соответствии с крутящим моментом для возврата.
8. Способ работы системы круиз-контроля, содержащий этапы, на которых:
управляют скоростью транспортного средства в пределах первого порогового значения скорости в соответствии с заданным значением, введенным в систему круиз-контроля одним из водителя или датчика переднего обзора транспортного средства;
определяют, находится ли текущее значение уклона в пределах первого порогового значения уклона;
регулируют заданное значение для управления скоростью транспортного средства в пределах второго порогового значения скорости, находящегося за пределами первого порогового значения скорости;
определяют, находится ли текущее значение уклона в пределах второго порогового значения уклона, и
регулируют заданное значение для возврата скорости транспортного средства в пределы первого порогового значения скорости.
9. Способ по п. 8, в котором регулировка заданного значения для управления скоростью транспортного средства в пределах второго порогового значения скорости включает в себя этапы, на которых:
осуществляют режим движения накатом системы круиз-контроля до тех пор, пока скорость транспортного средства находится в пределах третьего порогового значения скорости;
определяют, находится ли текущее значение уклона за пределами второго порогового значения уклона, и
поддерживают скорость транспортного средства за пределами первого порогового значения скорости.
10. Способ по п. 9, в котором осуществление режима движения накатом системы круиз-контроля включает в себя одно из переключения коробки передач транспортного средства на нейтральную передачу или запуска отсечки топлива в режиме замедления.
11. Способ по п. 8, дополнительно содержащий этап, на котором определяют по меньшей мере первое и второе пороговые значения скорости и первое и второе пороговые значения уклона в соответствии с рабочей характеристикой эффективности использования топлива.
12. Способ по п. 8, дополнительно содержащий этап, на котором инвертируют сигнал изменения крутящего момента для регулировки заданного значения.
13. Способ по п. 8, в котором первое пороговое значение уклона является первым вероятностным пороговым значением уклона.
14. Способ по п. 8, дополнительно содержащий этапы, на которых:
определяют крутящий момент для возврата в соответствии с текущим уклоном дороги и рабочей характеристикой эффективности использования топлива, и
регулируют заданное значение для возврата скорости транспортного средства в пределы первого порогового значения скорости в соответствии с крутящим моментом для возврата.
15. Устройство управления транспортным средством, выполненное с возможностью считывать выполняемые компьютером инструкции, сохраненные на невременном считываемом компьютером носителе, которые заставляют устройство управления транспортным средством выполнять операции, содержащие:
управление скоростью транспортного средства в пределах первого порогового значения скорости в соответствии с заданным значением, введенным в систему круиз-контроля;
определение, находится ли текущее значение уклона в пределах первого порогового значения уклона;
осуществление режима движения накатом системы круиз-контроля до тех пор, пока скорость транспортного средства находится в пределах второго порогового значения скорости;
определение, находится ли текущее значение уклона за пределами второго порогового значения уклона, и
поддерживают скорость транспортного средства за пределами первого порогового значения скорости;
регулируют заданное значение для управления скоростью транспортного средства в пределах третьего порогового значения скорости, находящегося за пределами первого порогового значения скорости;
определяют, находится ли текущее значение уклона в пределах второго порогового значения уклона, и
регулируют заданное значение для возврата скорости транспортного средства в пределы первого порогового значения скорости.
16. Устройство управления транспортным средством по п. 15, в котором упомянутые инструкции заставляют устройство управления транспортным средством выполнять операции, дополнительно содержащие изменение заданного значения в соответствии с сигналом обнаружения впереди идущего транспортного средства.
17. Устройство управления транспортным средством по п. 15, в котором упомянутые инструкции заставляют устройство управления транспортным средством выполнять операции, дополнительно содержащие определение по меньшей мере первого и второго пороговых значений скорости и первого и второго пороговых значений уклона в соответствии с рабочей характеристикой эффективности использования топлива, и при этом осуществление режима движения накатом системы круиз-контроля включает в себя одно из выборочного переключения коробки передач транспортного средства на нейтральную передачу и выборочного запуска отсечки топлива в режиме замедления.
18. Устройство управления транспортным средством по п. 15, в котором упомянутые инструкции заставляют устройство управления транспортным средством выполнять операции, дополнительно содержащие инвертирование сигнала изменения крутящего момента для регулировки заданного значения.
19. Устройство управления транспортным средством по п. 15, в котором первое пороговое значение уклона является первым вероятностным пороговым значением уклона.
20. Устройство управления транспортным средством по п. 15, в котором упомянутые инструкции заставляют устройство управления транспортным средством выполнять операции, дополнительно содержащие:
определение крутящего момента для возврата в соответствии с текущим уклоном дороги и рабочей характеристикой эффективности использования топлива, и
регулировку заданного значения для возврата скорости транспортного средства в пределы первого порогового значения скорости в соответствии с крутящим моментом для возврата.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| МОДУЛЬ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2493025C2 |

