Изобретение относится к области навигации и может быть использовано для контроля действий космонавта на борту космического аппарата (КА).
Известен способ контроля транспортных средств и передвижения персонала (патент РФ 2442220, заявка 2010144354 от 01.11.2010, МПК (2006.01) G08G 1/123), в котором осуществляют сбор информации об объекте, получаемой от приемника системы местоопределения и датчиков первичной информации, и передачу ее посредством радиосети и сети Интернет в центр контроля на коммуникационный сервер. При срабатывании размещаемых на объекте датчиков коммуникационный сервер передает команды па управление исполнительными устройствами/механизмами, обрабатывает и передает информацию об объектах транспортных средств и передвижении персонала на сервер хранения и архивирования данных и ПК для анализа и автоматизированного сравнения с информацией корпоративных информационных систем. Данный способ повышает эффективность контроля транспортных средств и передвижения персонала за счет генерации новых знаний об объектах контроля и процессах.
К недостаткам данного способа можно отнести то, что он не обеспечивает, в частности, учета ориентации оператора относительно окружающих его элементов и пространства.
Известен способ управления передвижным объектом (патент РФ 2370804, приоритет от 28.06.2005, МПК G05B 19/045 (2006.01) - прототип), включающий обнаружение движения передвижного объекта, определение местоположения объекта, проверку нахождения местоположения объекта в пределах заранее определенной зоны и формирование команд для управления передвижным объектом по результатам данной проверки. Данный способ обеспечивает управление подвижным объектом в едином цикле с определением координат его местоположения, что позволяет в режиме реального времени управлять движением объекта.
Недостатком способа-прототипа является то, что он не обеспечивает контроль выполнения оператором проверки заданных условий и состояния параметров управляемого объекта, в том числе визуальной проверки соответствия текущего состояния управляемого объекта требуемому.
Задачей, на решение которой направлено настоящее изобретение, является повышение эффективности контроля и управления действиями космонавта.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в контроле выполнения оператором визуальной проверки соответствия текущего состояния управляемого объекта требуемому состоянию путем определения и учета направления взгляда космонавта при контроле выполнения им действий на борту КА.
Технический результат достигается тем, что в способе контроля действий находящегося на борту космического аппарата космонавта, включающем определение местоположения космонавта, сравнение параметров местоположения с задаваемыми параметрами и формирование команд космонавту по результатам выполненного сравнения, дополнительно измеряют параметры текущего положения и ориентации головы космонавта относительно систем и элементов космического аппарата, измеряют параметры направления взгляда космонавта относительно головы космонавта при задаваемых фиксируемых и текущих направлениях взгляда и положениях и ориентации головы космонавта, по измеренным параметрам положения и ориентации головы космонавта и направления взгляда космонавта и определяемым параметрам текущего положения перемещаемых элементов на космическом аппарате определяют объекты, на которые направлен взгляд космонавта, определяют текущие параметры освещенности элементов космического аппарата, сравнивают параметры, определяющие объекты, на которые направлен взгляд космонавта, параметры положения космонавта относительно данных объектов и параметры освещенности данных объектов с задаваемыми значениями, соответствующими выполняемым космонавтом полетным операциям, и по результатам сравнения формируют команды на выполнение действий космонавту.
Поясним предложенные в способе действия.
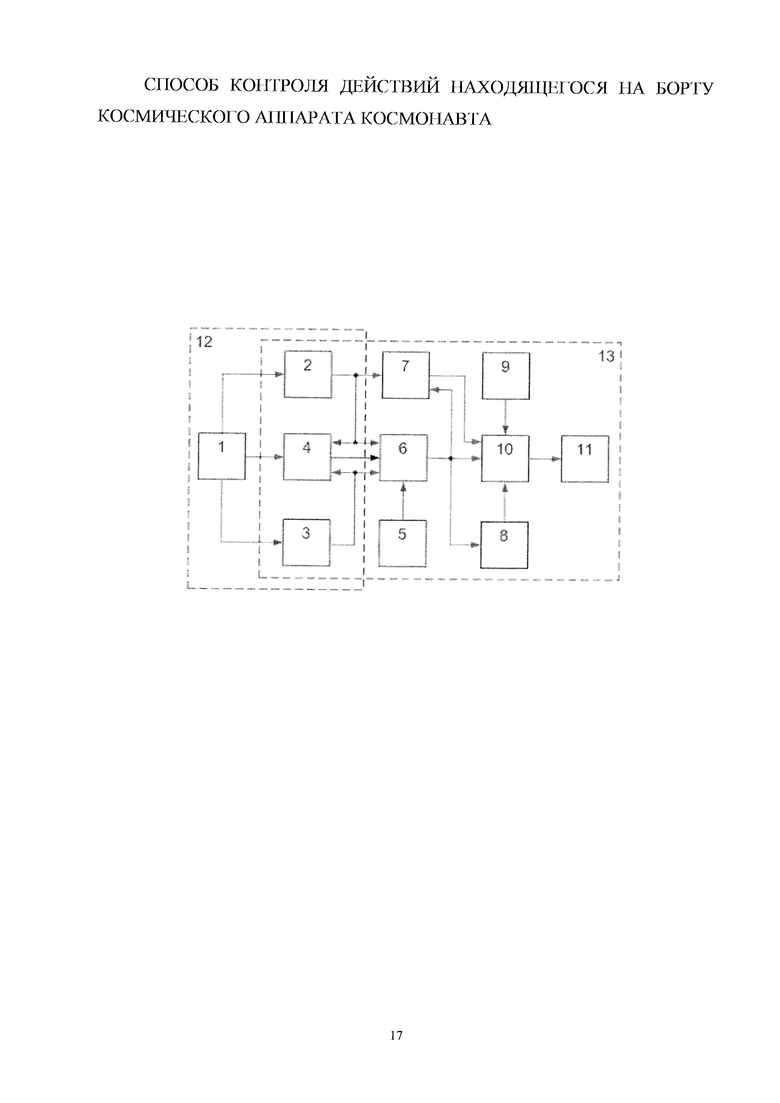
На представленном чертеже отображена блок-схема системы, реализующей предлагаемый способ, и введены следующие обозначения:
1 - блок задания параметров фиксируемых направлений взгляда и положений и ориентации головы космонавта;
2 - блок измерения параметров положения и ориентации головы космонавта относительно КА;
3 - блок измерения параметров направления взгляда космонавта относительно головы космонавта;
4 - блок определения калибровочных параметров;
5 - блок определения параметров положения перемещаемых элементов на КА;
6 - блок определения объектов, на которые направлен взгляд космонавта;
7 - блок определения параметров положения космонавта относительно объектов, на которые направлен взгляд космонавта;
8 - блок определения параметров освещенности элементов КА;
9 - блок задания параметров полетных операций;
10 - блок формирования команд космонавту;
11 - блок воспроизведения команд;
12 - блок выполнения калибровки;
13 - блок выполнения контроля действий космонавта при выполнении текущих полетных операций.
В представленной системе разные выходы блока 1 соединены со входами блоков 2, 3 и 4.
Выход блока 2 соединен со вторым входом блока 4 и первыми входами блоков 6 и 7.
Выход блока 3 соединен с третьим входом блока 4 и со вторым входом блока 6.
Выходы блоков 4 и 5 соединены с, соответственно, третьим и четвертым входами блока 6.
Выход блока 6 соединен со вторым входом блока 7 и входами блоков 8 и 10.
Выходы блоков 7, 8 и 9 соединены с, соответственно, вторым, третьим и четвертым входами блока 10.
Выход блока 10 соединен со входом блока 11.
Блоки с 1 по 4 составляют вместе блок выполнения калибровки 12.
Блоки со 2 по 11 составляют вместе блок выполнения контроля действий космонавта при выполнении текущих полетных операций 13.
В предлагаемом способе на начальном этапе задействуется блок выполнения калибровки 12, с использованием которого выполняют следующие действия, обеспечивающие «настройку» процесса определения направления взгляда космонавта.
В блоке задания параметров фиксируемых направлений взгляда и положений и ориентации головы космонавта 1 задают параметры фиксируемых направлений взгляда и фиксируемых положений и ориентации головы космонавта для определения калибровочных параметров, которые в дальнейшем будут использоваться в расчетах для определения объектов, на которые направлен текущий взгляд космонавта в произвольные моменты времени. Например, задание параметров фиксируемых направлений взгляда осуществляется заданием фиксируемых положения и ориентации головы космонавта относительно КА и фиксируемых разнесенных в поле зрения космонавта объектов окружающей среды (КА), на которые должен быть направлен взгляд космонавта.
В блоке измерения параметров положения и ориентации головы космонавта относительно КА 2 в соответствии с данными, поступившими от блока 1, запоминают задаваемые параметры фиксируемых положений и ориентации головы космонавта. Если задаваемые фиксируемые положения и ориентация головы космонавта заданы не формализовано (например, простым описанием, как должна быть ориентирована голова космонавта относительно КА), то при указанных задаваемых фиксируемых положениях и ориентации головы космонавта выполняют измерение формализованных параметров положения и ориентации головы космонавта относительно КА. Например, измерение формализованных параметров текущего положения и ориентации головы космонавта относительно КА может быть осуществлено следующим образом:
- размещают в разнесенных точках на КА не менее чем четыре снабженных оптическими системами позиционно-чувствительных детектора инфракрасного излучения;
- размещают на голове космонавта не менее чем три излучателя инфракрасных импульсных сигналов,
- осуществляют формирование управляющих воздействий на упомянутые излучатели инфракрасных импульсных сигналов при текущем положении головы космонавта;
- упомянутыми позиционно-чувствительными детекторами инфракрасного излучения регистрируют инфракрасные сигналы, излучаемые инфракрасными излучателями (т.е. осуществляют измерение параметров, генерируемых позиционно-чувствительными детекторами инфракрасного излучения);
- по измеренным значениям параметров, генерируемых позиционно-чувствительными детекторами инфракрасного излучения, и заданным значениям параметров расположения детекторов и оптических систем определяют значения координат местоположений излучателей инфракрасных импульсных сигналов в системе координат КА, по которым определяют параметры относительного положения местоположений излучателей инфракрасных импульсных сигналов,
- по текущим значениям координат местоположений излучателей инфракрасных импульсных сигналов определяют параметры текущего положения и ориентации головы космонавта относительно КА,
при этом управление и синхронизацию моментов излучения, приема и передачи данных по результатам приема инфракрасных импульсных сигналов осуществляют по радиоканалу.
Также измерение параметров текущего положения и ориентации головы космонавта относительно КА может быть осуществлено по аналогичной схеме с использованием генераторов и приемников ультразвукового излучения (см. Способ ориентирования перемещаемого в пилотируемом аппарате прибора и система для его осуществления. Патент РФ 2531781. Бюл. №30, 2014).
В блоке измерения параметров направления взгляда космонавта относительно головы космонавта 3 в соответствии с данными, поступившими от блока 1, измеряют параметры направления взгляда космонавта относительно головы космонавта при задаваемых фиксируемых направлениях взгляда и фиксируемых положениях и ориентации головы космонавта. Например, измерение параметров направления взгляда может быть осуществлено следующим образом:
- инфракрасным излучением от не менее чем 2 источников инфракрасного излучения освещают глаза космонавта, последовательно направленные на не менее чем пять задаваемых фиксируемых разнесенных в поле зрения космонавта объекта окружающей среды (КА),
- осуществляют съемку глаз космонавта инфракрасной камерой, установленной соосно данным источникам инфракрасного излучения,
- выделяют на полученном изображении глаз, зрачок (центр зрачка) и блик на роговице глаза от упомянутого инфракрасного излучения,
- по их взаимному расположению на основе вектора смещения между позициями центра зрачка и роговичного блика (Pupil - CR метод) определяют и фиксируют (запоминают) параметры направления взгляда космонавта относительно головы космонавта, соответствующие каждой выполняемой космонавтом комбинации заданных направлений взгляда при заданных положениях и ориентации головы космонавта.
В блоке определения калибровочных параметров 4 в соответствии с данными, поступившими от блоков 1÷3, по измеренным параметрам направления взгляда и положения и ориентации головы космонавта определяют и фиксируют (запоминают) калибровочные параметры, которые в дальнейшем будут использоваться в расчетах для определения объектов, на которые направлен текущий взгляд космонавта в произвольные текущие моменты времени.
Далее, в процессе контроля действий космонавта при выполнении текущих полетных операций, задействуется блок выполнения контроля действий космонавта при выполнении текущих полетных операций 13, с использованием которого выполняют следующие действия.
В блоке измерения параметров положения и ориентации головы космонавта относительно КА 2 измеряют параметры текущего положения и ориентации головы космонавта относительно КА. Их измерение осуществляется вышеописанным образом.
В блоке измерения параметров направления взгляда космонавта относительно головы космонавта 3 измеряют параметры текущего направления взгляда космонавта относительно головы космонавта. Например, измерение параметров текущего направления взгляда может быть осуществлено следующим образом:
- освещают глаза космонавта инфракрасным излучением от не менее чем 2 источников инфракрасного излучения,
- осуществляют съемку глаз космонавта инфракрасной видеокамерой, установленной соосно данным источникам инфракрасного излучения,
- выделяют на полученном изображении глаз, зрачок (центр зрачка) и блик на роговице глаза от упомянутого инфракрасного излучения,
- по их взаимному расположению на основе вектора смещения между позициями центра зрачка и роговичного блика (Pupil - CR метод) определяют параметры текущего направления взгляда космонавта относительно головы космонавта.
В блоке определения параметров положения перемещаемых элементов на КА 5 определяют параметры текущего положения перемещаемых элементов на КА. Например, определение параметров текущего положения перемещаемых элементов на КА (грузов, оборудования, элементов конструкции и т.д.) осуществляется посредством использования базы данных перемещаемых элементов, в которой указываются все перемещаемые элементы и их текущие положения.
В блоке определения объектов, на которые направлен взгляд космонавта 6 по данным, поступившим из блоков 2÷5, определяют объект (элемент) КА, на который направлен взгляд космонавта в текущий момент времени: по определенным параметрам текущего положения и ориентации головы космонавта, параметрам текущего направления взгляда космонавта относительно головы космонавта и упомянутым калибровочным параметрам для расчета направления взгляда космонавта определяют параметры текущего направления взгляда космонавта относительно КА, по которым и с учетом формализованного описания «неподвижных» элементов КА и определенных параметров текущего положения перемещаемых элементов на КА определяют объект КА, на который направлен взгляд космонавта в текущий момент времени.
В блоке определения параметров положения космонавта относительно объектов, на которые направлен взгляд космонавта 7 по данным, поступившим из блоков 2 и 6, определяют параметры положения космонавта относительно объектов, на которые направлен взгляд космонавта (в том числе определяют расстояние от космонавта до указанных объектов).
В блоке определения параметров освещенности элементов КА 8 определяют текущие параметры освещенности элементов КА, на которые направлен взгляд космонавта. Например, определение параметров текущей освещенности элементов КА может быть выполнено на основе телеметрической информации о включенных на КА осветительных приборах и об их работоспособности, а также с учетом навигационных данных о движении и ориентации КА, по которым определяется уровень освещенности элементов интерьера КА солнечным светом, поступающим через иллюминаторы.
В блоке задания параметров полетных операций 9 задают параметры описаний полетных операций, которые включают, в том числе, эталонные (модельные) значения параметров, определяющих объекты, на которые должен направляться взгляд космонавта в процессе выполнения полетной операции, параметров положения космонавта относительно данных объектов (в том числе расстояние от космонавта до объектов, которое определяет возможности визуального распознавания наблюдаемых объектов) и параметров требуемой освещенности данных объектов при их наблюдении космонавтом.
В блоке формирования команд космонавту 10 по данным, поступившим из блоков 6÷9, сравнивают параметры, определяющие объекты, на которые направлен взгляд космонавта, параметры положения космонавта относительно данных объектов и параметры освещенности данных объектов с задаваемыми значениями, соответствующими выполняемым космонавтом полетным операциям, выполняют анализ результатов сравнения и по результатам анализа выполняют формирование команд космонавту, в том числе команды, корректирующие текущие действия космонавта по выполнению им текущей полетной операции.
В блоке воспроизведения команд 11 по данным, поступившим из блока 10, воспроизводят команды на выполнение действий космонавту. Например, подготовленные команды воспроизводят посредством технических средств воспроизведения в звуковом или визуальном формализованных форматах, приспособленных для восприятия экипажем КА - звуковоспроизводящей аппаратурой, выводящей звук, например, на внешние динамики или наушники, или средством визуального отображения, выводящим изображение, например, на дисплей или очки.
Поясним предложенные в способе действия применительно к действиям космонавта.
При выполнении произвольной полетной операции на КА космонавт выполняет процедуру, которая включает в себя последовательность команд, выдаваемых в заданные моменты времени.
В общем случае перед выдачей каждой команды космонавт должен оценить состояние заданных бортовой инструкцией параметров бортовых систем и полетной обстановки. Для этого он последовательно должен считать требуемую информацию с различных средств отображения, расположенных в кабине КА.
Если космонавт не посмотрел на какой-либо элемент/индикатор, на котором отображается заданный в бортовой инструкции параметр (т.е. направление взгляда не было зафиксировано в зоне данного параметра), то это означает, что космонавт не считал требуемую информацию и не проконтролировал обязательный для визуального контроля космонавтом параметр.
В предлагаемом способе осуществляется фиксация факта пропуска контроля параметра и формируется команда на выдачу космонавту напоминания о необходимости выполнения проверки данного контрольного параметра. При этом логика работы бортовых средств КА может предусматривать выполнение автоматической блокировки прохождения команд управления без получения соответствующего подтверждения о выполнении космонавтом необходимого визуального контроля необходимых параметров. После того как взгляд космонавта будет зафиксирован в зоне контролируемого параметра, данная блокировка управления снимается.
Приведем пример выполнения численных оценок требуемых характеристик технических средств для реализации предлагаемого способа.
Блок измерения параметров направления взгляда космонавта относительно головы космонавта 3 может быть выполнен на базе известных систем определения направления взгляда. Например, может использоваться система определения направления взгляда (см., например, Фроимсон М.И., Михайлов Д.М., Корсакова А.И., Сорокина М.А., Кондратьев М.Д. Система определения направления взгляда пользователя в режиме реального времени // «Спецтехника и связь» №3/2013), включающая дисплей, 2 инфракрасных источника света и инфракрасную видеокамеру (инфракрасный диапазон используется для увеличения контрастности и уменьшения помех на изображении глаза). Инфракрасная видеокамера и 2 инфракрасных источника света (каждый из которых направлен в зону одного из глаз) симметрично расположены под конструкцией дисплея так, что плоскость изображения сенсорной матрицы видеокамеры совпадает с плоскостью дисплея.
Приведем пример определения требований к разрешающей способности используемой в данной системе видеокамере.
Например, считаем, что космонавт смотрит на стандартный дисплей размером d=0,21 м по горизонтали, который находится на расстоянии r=0,6 м от глаз космонавта. Это соответствует тому, что угол θ, под которым космонавт видит дисплей, составляет величину
 ,
,
где θ=2α;
α - угол между направлением на центр и край дисплея;
tgα=d/(2r)-0,175;
α=10°.
При таком угле глаз человека работает без напряжения.
Стандартное количество элементов (исполняемых или контролируемых космонавтом команд) в горизонтальной строке на экране дисплея равно десяти (с пробелами между ними). Отсюда получаем, что угол поля зрения космонавта на один элемент (команду) на экране с дистанции 0,6 м составляет ≈2°.
Согласно теореме Котельникова для точного различения элемента (команды) на экране необходимо как минимум два пространственных отсчета. Поэтому зрачок космонавта должен перемещаться для этого с точностью не меньше 1°.
Рассматриваем глаз человека как оптическую систему. Зрачок на роговице глазного яблока вместе с хрусталиком представляют собой диафрагму вместе с объективом, которые формируют изображение на сетчатке глаза.
Разрешающую способность инфракрасной видеокамеры определяем исходя из размера различаемого смещения. Как было показано, необходимо различать движение (поворот) глаза на 1°.
Для взрослого человека линейное смещение глаза, соответствующее повороту зрачка глазного яблока на 1°, составляет величину
 ,
,
где X=Rϕπ/180°;
R - радиус кривизны глазного яблока (у взрослого человека R≈13 мм);
φ - угол поворота зрачка глазного яблока (ϕ≈1° из расчета, приведенного выше).
Согласно теореме Котельникова, чтобы различить смещение X необходимо 2 точки отсчета, т.е на 1 пиксель матрицы видеокамеры приходится смещение зрачка глаза на 0,1135 мм. Отсюда с учетом округления 1 мм по поверхности глаза должен соответствовать 10 пикселям по горизонтали на изображении.
Смещение по вертикали аналогично смещению по горизонтали.
В среднем размеры области глаза составляют по высоте 20 мм и по ширине 30 мм, откуда следует, что размер изображения глаза по горизонтали на изображении должен быть не менее 300 пикселей.
В среднем размеры области глаза составляют по высоте 20 мм и по ширине 30 мм, откуда следует, что размер изображения глаза по горизонтали на изображении должен быть не менее 300 пикселей.
С учетом того что область вокруг глаза больше (возьмем коэффициент 1,5), требуется не менее 450 пикселей.
Таким образом, для съемки требуется использовать видеокамеру, не хуже стандарта с разрешением 640×420 пикселей.
За изменения позиции глаза, которые возникают при смене точек фиксации и детальном рассматривании объекта, отвечают движения глаза, называемые макросаккадами. Длительность макросаккад составляет примерно Т=70 мсек, откуда следует, что с учетом теоремы Котельникова минимальная частота кадров съемки видеокамеры должна составлять
 ,
,
где  ;
;
 .
.
С учетом округления имеем  кадров/секунду.
кадров/секунду.
Также для измерения параметров направления взгляда может использоваться система (очки) SMI Eye Tracking Glasses (Германия). Для каждого глаза в дужке очков установлено по портативной инфракрасной видеокамере и инфракрасному источнику света. Бинокулярный режим определения направления взгляда позволяет повысить точность расчетов.
Опишем технический эффект предлагаемого изобретения.
Предложенный способ обеспечивает учет направления взгляда космонавта при контроле выполнения им действий на борту КА, что, в свою очередь, повышает эффективность контроля действий экипажа КА при выполнении полетных операций. Учет направления взгляда космонавта при контроле выполнения им действий на борту КА может осуществляться как внутри герметичного отсека КА, так и в открытом космическом пространстве снаружи КА, при этом представленные возможные технические средства реализации способа никак не ограничивают перемещения космонавта и не создают помех его деятельности на борту КА.
Достижение технического результата в предложенном изобретении обеспечивается за счет предложенного измерения и определения предложенных параметров (параметров текущего положения и ориентации головы космонавта относительно КА и параметров направления взгляда космонавта относительно головы космонавта при задаваемых фиксируемых и текущих направлениях взгляда и положениях и ориентации головы космонавта, параметров текущего положения перемещаемых элементов на КА, текущих параметров освещенности элементов КА), предложенного определения объектов, на которые направлен взгляд космонавта в текущие моменты времени, предложенного сравнения предложенных параметров с задаваемыми значениями, соответствующими выполняемым космонавтом полетным операциям, предложенного формирования команд на выполнение действий космонавту по результатам выполненного сравнения.
В настоящее время технически все готово для реализации предложенного способа. Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено с использованием существующих технических средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ГОТОВНОСТИ КОСМОНАВТА К ВЫПОЛНЕНИЮ ПОЛЕТНЫХ ОПЕРАЦИЙ | 2016 |
|
RU2653219C2 |
| СПОСОБ КОНТРОЛЯ ГОТОВНОСТИ ЭКИПАЖА КОСМИЧЕСКОГО АППАРАТА К НЕШТАТНЫМ СИТУАЦИЯМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2605230C1 |
| СПОСОБ КОНТРОЛЯ ПЕРЕДВИЖЕНИЯ КОСМОНАВТА ОТНОСИТЕЛЬНО КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2604892C1 |
| СПОСОБ КОНТРОЛЯ НЕШТАТНЫХ СИТУАЦИЙ НА ПИЛОТИРУЕМОМ КОСМИЧЕСКОМ АППАРАТЕ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2603814C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ КОСМОНАВТА К ИДЕНТИФИЦИРУЕМЫМ ОБЪЕКТАМ НА КОСМИЧЕСКОЙ СТАНЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2669155C1 |
| СПОСОБ УПРАВЛЕНИЯ СНАБЖЕННЫМ СОЛНЕЧНЫМИ БАТАРЕЯМИ КОСМИЧЕСКИМ АППАРАТОМ | 2018 |
|
RU2679101C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПРЕИМУЩЕСТВЕННО ОТНОСИТЕЛЬНО КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2600039C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ВОЗДУХА НА БОРТУ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2739649C1 |
| СПОСОБ КОНТРОЛЯ ПРОИЗВОДИТЕЛЬНОСТИ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ | 2016 |
|
RU2653891C2 |
| СПОСОБ УПРАВЛЕНИЯ СНАБЖЕННЫМ СОЛНЕЧНЫМИ БАТАРЕЯМИ КОСМИЧЕСКИМ АППАРАТОМ | 2018 |
|
RU2679094C1 |
Изобретение относится к управлению космическим аппаратом (КА) с участием космонавта (К). Способ включает определение параметров местоположения К, их сравнение с задаваемыми параметрами и формирование команд К. При этом измеряют параметры текущего положения и ориентации головы К относительно систем и элементов КА, а также параметры направления взгляда К при задаваемых и текущих положениях и ориентации головы К. По результатам этих измерений и параметрам текущего положения перемещаемых элементов КА определяют объекты, на которые направлен взгляд К. Определяют текущие параметры освещенности элементов КА. Сравнивают с задаваемыми значениями параметры, определяющие: объекты, на которые направлен взгляд К, положения К относительно данных объектов и их освещенность. По результатам сравнения формируют команды на выполнение действий К. Техническим результатом является учет направления взгляда К при контроле его действий. 1 ил.
Способ контроля действий находящегося на борту космического аппарата космонавта, включающий определение местоположения космонавта, сравнение параметров местоположения с задаваемыми параметрами и формирование команд космонавту по результатам выполненного сравнения, отличающийся тем, что дополнительно измеряют параметры текущего положения и ориентации головы космонавта относительно космического аппарата, измеряют параметры направления взгляда космонавта относительно головы космонавта при задаваемых фиксируемых и текущих направлениях взгляда и положениях и ориентации головы космонавта, по измеренным параметрам положения и ориентации головы космонавта и направления взгляда космонавта и определяемым параметрам текущего положения перемещаемых элементов на космическом аппарате определяют объекты, на которые направлен взгляд космонавта, определяют текущие параметры освещенности элементов космического аппарата, сравнивают параметры, определяющие объекты, на которые направлен взгляд космонавта, параметры положения космонавта относительно данных объектов и параметры освещенности данных объектов с задаваемыми значениями, соответствующими выполняемым космонавтом полетным операциям, и по результатам сравнения формируют команды на выполнение действий космонавту.
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2370804C2 |
| CN 103558910 A, 05.02.2014; | |||
| US 2005075763 A1, 07.04.2005 | |||
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ПОДГОТОВКИ И АТТЕСТАЦИИ ПО БЕЗОПАСНОСТИ ПРОИЗВОДСТВА | 1999 |
|
RU2166211C2 |
| US 6073109 A, 06.06.2000. | |||

