Предлагаемое техническое решение относится к области космической техники и может быть использовано для контроля передвижения космонавта на космической станции.
Известен способ управления передвижным объектом (патент РФ RU 2370804, 20.10.2009 Бюл. №29, приоритет от 28.06.2005, МПК (2006.01) G05B 19/045), включающий обнаружение движения передвижного объекта, определение местоположения объекта, проверку нахождения местоположения объекта в пределах заранее определенной зоны и формирование команд для управления передвижным объектом по результатам данной проверки.
Известна система слежения за местоположением (патент РФ 2370804, приоритет от 28.06.2005, МПК (2006.01) G05B 19/045), реализующая вышеописанный способ и содержащая контроллер, соединенный с компонентом обнаружения движения и компонентом определения местоположения, при этом контроллер содержит блок задания целевой зоны местоположения объекта, блок сравнения, блок выработки команд для управления объектом. При работе системы компонент обнаружения движения обнаруживает движение передвижного объекта и вырабатывает для контроллера сигнал, сообщающий о движении. Контроллер в ответ на этот сигнал вызывает определение компонентом определения местоположения передвижного объекта, осуществляет проверку нахождения координат объекта в пределах заранее определенной зоны и по результатам проверки вырабатывает команды для управления объектом.
Данные способ и система обеспечивают управление подвижным объектом в едином цикле с определением координат его местоположения, что позволяет в режиме реального времени управлять движением объекта, используя для этого непосредственно энергию, содержащуюся в сигнале отклика, генерируемого подвижным объектом.
Недостатком данных способа и системы является то, что они не обеспечивают учет внешних/окружающих условий вокруг объекта подвижной формы во время его перемещения по маршруту, влияющих на выбор маршрута и возможности управления перемещением объекта.
Известен способ контроля передвижения космонавта относительно КА (патент РФ RU 2604892 С1, 20.12.2016 Бюл. №35, МПК (2006.01) G01C 21/24 - прототип способа), включающий определение местоположения объекта, проверку нахождения объекта в пределах предусмотренной зоны и формирование команд на передвижение объекта по результатам данной проверки, дополнительно определяют параметры относительного положения местоположений излучателей инфракрасных импульсных сигналов при не менее, чем одном заданном фиксированном положении подвижных частей космонавта с размещенными на упомянутых подвижных частях по не менее, чем одному излучателю инфракрасных импульсных сигналов, далее в процессе контроля передвижения космонавта осуществляют формирование управляющих воздействий на упомянутые излучатели инфракрасных импульсных сигналов, осуществляют измерение параметров, генерируемых не менее, чем четырьмя снабженными оптическими системами и размещенными в разнесенных точках, фиксированных в системе координат КА, позиционно-чувствительными детекторами инфракрасного излучения, по измеренным значениям параметров, генерируемых позиционно-чувствительными детекторами инфракрасного излучения, и заданным значениям параметров расположения детекторов и оптических систем определяют значения координат местоположений излучателей инфракрасных импульсных сигналов в системе координат КА, по текущим значениям координат местоположений излучателей инфракрасных импульсных сигналов и параметрам относительного положения местоположений излучателей инфракрасных импульсных сигналов, определенным при заданных фиксированных положениях космонавта, определяют параметры текущего положения космонавта относительно КА, измеряют параметры текущего положения подвижных элементов конструкции КА, измеряют параметры движения КА, после чего формируют команды на передвижение космонавта из его текущего положения в целевые положения по маршруту, определенному с учетом определяемых параметров текущего положения перемещаемых элементов на КА и измеренных текущих и прогнозируемых параметров положения подвижных элементов конструкции КА, прогнозируемые параметры положения которых определяют по измеренным параметрам их текущего положения и измеренным параметрам движения КА.
Известна система контроля передвижения космонавта относительно КА (патент РФ RU 2604892 С1, 20.12.2016, бюл. №35, МПК (2006.01) G01C 21/24 - прототип системы), реализующая способ-прототип и включающая блок определения параметров положения космонавта, блок задания параметров целевых положений космонавта, блок сравнения, блок определения маршрута передвижения космонавта, блок формирования команд на передвижение космонавта, не менее двух блоков излучателей инфракрасных импульсных сигналов, размещенных на разных подвижных частях космонавта, не менее двух радиоприемных устройств, не менее двух средств сопряжения радиоустройств с блоками излучателей инфракрасных сигналов, не менее четырех блоков позиционно-чувствительных детекторов инфракрасного излучения, размещенных в разнесенных точках, фиксированных в системе координат КА, не менее четырех оптических систем, не менее четырех блоков формирования данных приема инфракрасных сигналов, не менее четырех средств сопряжения радиоустройств с блоками формирования данных приема инфракрасных сигналов, не менее пяти радиоприемо-передающих устройств, блок формирования команд управления излучением и приемом инфракрасных сигналов, средство сопряжения аппаратуры с пятым радиоприемо-передающим устройством, синхронизатор, блок задания параметров расположения детекторов инфракрасного излучения, блок задания параметров оптических систем, блок определения параметров направлений от детекторов инфракрасного излучения на излучатели инфракрасных сигналов, блок определения координат местоположений излучателей инфракрасных сигналов, блок индикации фиксированных положений космонавта, блок определения параметров относительного положения излучателей инфракрасных сигналов при фиксированных положениях космонавта, блок определения параметров положения перемещаемых элементов на КА, блок измерения параметров движения КА, блок измерения параметров положения подвижных элементов конструкции КА, блок прогнозирования параметров положения подвижных элементов конструкции КА, при этом введены соответствующие связи, в том числе блок определения параметров положения космонавта соединен с блоком определения маршрута передвижения космонавта, который соединен с блоком формирования команд на передвижение космонавта.
Данные способ и система обеспечивают оперативный учет точного текущего положения членов экипажа относительно КА и его подвижных и перемещаемых элементов при контроле передвижения членов экипажа КА, при этом обеспечивается учет параметров текущего положения космонавта как объекта с подвижными частями, включая информацию о форме и ориентации космонавта.
Недостатки данных способа и системы связаны с тем, что они не предусматривают учета текущего взаимного расположения космонавта и хранящихся на КА идентифицируемых объектов, которые космонавт должен использовать в процессе своей деятельности на борту КА. Данная проблема наиболее актуальна для таких КА как модульные космические станции, на которых размещено большое количество разнообразных перемещаемых космонавтами объектов, которые имеют определенные сроки годности (данные сроки определены как для хранения, так и для использования объектов) и определенное, в общем случае меняющееся расположение на станции, а маршруты перемещения космонавта к данным объектам могут составлять продолжительные пути по модулям космической станции.
Задачей, на решение которой направлено настоящее изобретение, является повышение эффективности управления пилотируемым КА за счет минимизации времени перемещения космонавта к хранящимся на КА идентифицируемым объектам.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении оперативного учета при управлении передвижением космонавта характеристик (спецификации, сроков годности и др.) хранящихся на космической станции идентифицируемых объектов, а также параметров текущего расположения космонавта относительно требуемых (целевых) идентифицируемых объектов, в направлении к которым ему необходимо совершить перемещения.
Технический результат достигается тем, что в способе управления передвижением космонавта к идентифицируемым объектам на космической станции, включающем определение параметров текущего положения космонавта и формирование команд на передвижение космонавта к идентифицируемым объектам, дополнительно осуществляют измерение параметров сигнала, генерируемого считывателями информации от антенн, излучающих импульсы на опрос радиочастотных меток и получающих ответный сигнал от радиочастотных меток, размещенных на идентифицируемых объектах, расположенных в установленных на космической станции средствах их хранения, снабженных упомянутыми антеннами и считывателями информации, по значениям параметров сигнала, генерируемого считывателями информации, и заданным значениям параметров местоположений антенн определяют значения параметров местоположений радиочастотных меток, по которым осуществляют идентификацию и определяют характеристики и параметры текущего местоположения идентифицируемых объектов на космической станции, после чего формируют команды на передвижение космонавта из его текущего положения к идентифицируемым объектам по маршруту, определенному с учетом характеристик и параметров текущего местоположения идентифицируемых объектов на космической станции.
Технический результат достигается также тем, что в системе управления передвижением космонавта к идентифицируемым объектам на космической станции, включающей блок определения параметров положения космонавта, выход которого соединен с первым входом блока определения маршрута передвижения космонавта, выход которого соединен со входом блока формирования команд на передвижение космонавта, дополнительно идентифицируемые объекты снабжены радиочастотными метками и введены установленные на космической станции средства хранения идентифицируемых объектов, каждое из которых содержит антенну для обнаружения радиочастотных меток и связанное с ней считывающее устройство, блок формирования управляющих воздействий на считывающие устройства, блок задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов, блок задания значений параметров местоположения антенн, блок определения характеристик идентифицируемых объектов, блок определения параметров местоположения идентифицируемых объектов, блок определения последовательности использования идентифицируемых объектов, при этом выход блока формирования управляющих воздействий на считывающие устройства соединен с первым входом считывающего устройства, второй вход и первый выход которого соединены с соответственно выходом и входом антенны, причем второй выход считывающего устройства соединен с первыми входами блока определения характеристик идентифицируемых объектов и блока определения параметров местоположения идентифицируемых объектов, вторые входы которых соединены с выходами соответственно блока задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов и блока задания значений параметров местоположения антенн, а выходы соединены с соответственно первым и вторым входами блока определения последовательности использования идентифицируемых объектов, третий вход и выход которого соединены с соответственно выходом блока определения параметров положения космонавта и вторым входом блока определения маршрута передвижения космонавта, третий и четвертый входы которого соединены с выходами соответственно блока определения характеристик идентифицируемых объектов и блока определения параметров местоположения идентифицируемых объектов, третий вход которого также соединен с выходом блока задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов.
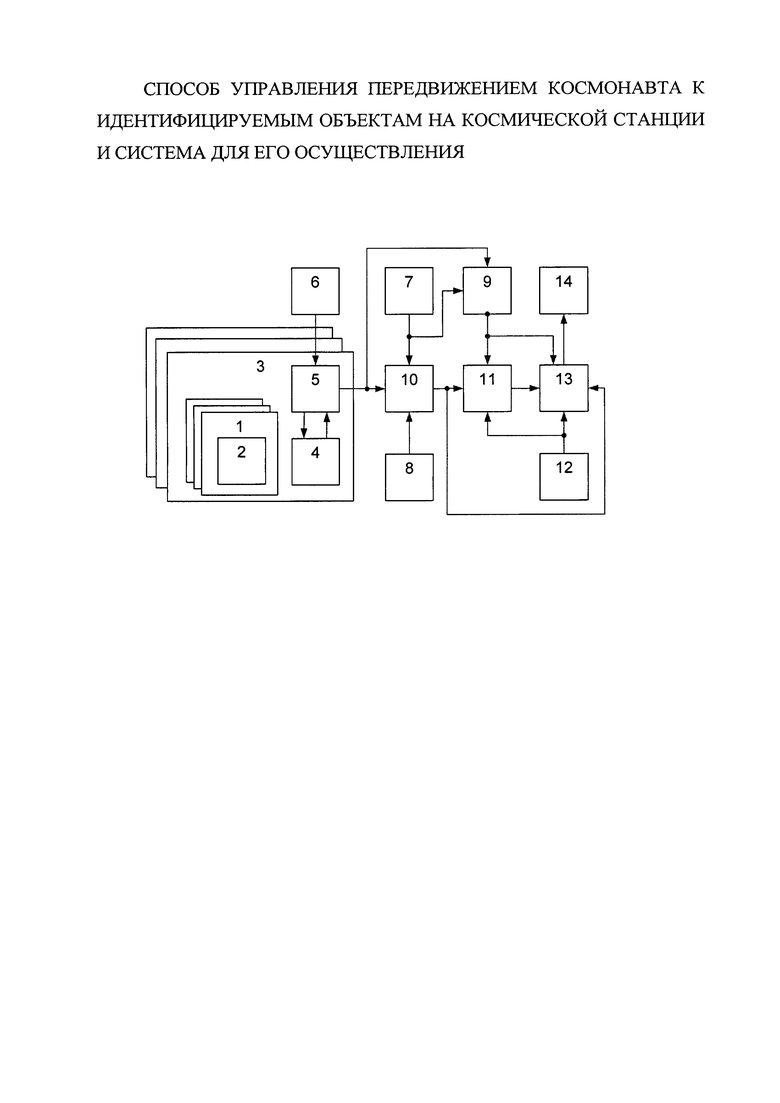
Изобретение поясняется чертежом, на котором представлена блок-схема предложенной системы и введены следующие обозначения:
1 - идентифицируемые объекты;
2 - радиочастотные метки;
3 - средства хранения идентифицируемых объектов;
4 - антенна;
5 - считывающее устройство;
6 - блок формирования управляющих воздействий на считывающие устройства;
7 - блок задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов;
8 - блок задания значений параметров местоположения антенн;
9 - блок определения характеристик идентифицируемых объектов;
10 - блок определения параметров местоположения идентифицируемых объектов;
11 - блок определения последовательности использования идентифицируемых объектов;
12 - блок определения параметров положения космонавта;
13 - блок определения маршрута передвижения космонавта;
14 - блок формирования команд на передвижение космонавта.
В предлагаемом способе управления передвижением космонавта к идентифицируемым объектам на космической станции определяют параметры текущего положения космонавта, осуществляют измерение параметров сигнала, генерируемого считывателями информации от антенн, которые генерируют радиочастотные излучающие импульсы на опрос радиочастотных меток и получают ответный сигнал от радиочастотных меток, которые размещены на идентифицируемых объектах, которые расположены в специальных средствах хранения идентифицируемых объектов.
Средства хранения идентифицируемых объектов установлены в модулях космической станции и снабжены упомянутыми антеннами и считывателями информации.
По значениям параметров сигнала, генерируемого считывателями информации, и заданным значениям параметров местоположений антенн определяют значения параметров местоположений радиочастотных меток, по которым осуществляют идентификацию и определяют характеристики и параметры текущего местоположения идентифицируемых объектов в модулях космической станции. К характеристикам идентифицируемых объектов относятся, например, спецификации идентифицируемых объектов, их сроки годности и др.
Далее составляют (определяют) последовательность использования идентифицируемых объектов, которая определяется с учетом текущего положения космонавта и определенных характеристик и параметров текущего местоположения идентифицируемых объектов в модулях космической станции, и составляют (определяют) маршрут перемещения космонавта, который определяется с учетом текущего положения космонавта, составленной последовательности использования идентифицируемых объектов, характеристик идентифицируемых объектов и параметров текущего местоположения идентифицируемых объектов в модулях космической станции.
После этого формируют команды на передвижение космонавта из его текущего положения к идентифицируемым объектам по составленному маршруту.
Опишем предлагаемую систему.
Находящиеся на борту космической станции идентифицируемые объекты 1 снабжены радиочастотными метками 2 и размещены в специальных средствах хранения идентифицируемых объектов 3.
В качестве радиочастотных меток могут использоваться известные RFID-метки (RFID - Radio Frequency Indentification), широко используемые в радиочастотной технологии, применяемой в различных областях деятельности (см. Перспективные варианты использования технологии радиочастотной идентификации в библиотечном и музейном деле /Кириллов Н.П., Дашевский В.П., Соколов Б.В., Юсупов Р.М.//Труды СПИИРАН. 2008. Вып. 7. С. 48-53; Способ определения положения объекта с использованием радиочастотных меток. Патент РФ RU 2472218 С1, 10.01.2013, бюл. №1, МПК (2006.01) G06K 5/00, G01S 5/16).
Средства хранения идентифицируемых объектов 3 заданным образом (например, стационарно) установлены в модулях космической станции. Каждое средство хранения содержит антенну 4 для обнаружения радиочастотных меток и связанное с ней считывающее устройство 5.
Кроме этого, система содержит: блок формирования управляющих воздействий на считывающие устройства 6, блок задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов 7, блок задания значений параметров местоположения антенн 8, блок определения характеристик идентифицируемых объектов 9, блок определения параметров местоположения идентифицируемых объектов 10, блок определения последовательности использования идентифицируемых объектов 11, блок определения параметров положения космонавта 12, блок определения маршрута передвижения космонавта 13, блок формирования команд на передвижение космонавта 14.
Выход блока определения параметров положения космонавта 12 соединен с первым входом блока определения маршрута передвижения космонавта 13, выход которого соединен со входом блока формирования команд на передвижение космонавта 14.
Выход блока формирования управляющих воздействий на считывающие устройства 6 соединен с первым входом считывающего устройства 5, второй вход и первый выход которого соединены с соответственно выходом и входом антенны 4.
Второй выход считывающего устройства 5 соединен с первыми входами блока определения характеристик идентифицируемых объектов 9 и блока определения параметров местоположения идентифицируемых объектов 10, вторые входы которых соединены с выходами соответственно блока задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов 7 и блока задания значений параметров местоположения антенн 8.
Выходы блока определения характеристик идентифицируемых объектов 9 и блока определения параметров местоположения идентифицируемых объектов 10 соединены с соответственно первым и вторым входами блока определения последовательности использования идентифицируемых объектов 11, третий вход и выход которого соединены с соответственно выходом блока определения параметров положения космонавта 12 и вторым входом блока определения маршрута передвижения космонавта 13.
Третий и четвертый входы блока определения маршрута передвижения космонавта 13 соединены с выходами соответственно блока определения характеристик идентифицируемых объектов 9 и блока определения параметров местоположения идентифицируемых объектов 10, третий вход которого также соединен с выходом блока задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов 7.
Работа системы осуществляется следующим образом.
Блок формирования управляющих воздействий на считывающие устройства 6 формирует команды управления считывающими устройствами 5.
Считывающие устройства 5 в соответствии с поступающими на них командами осуществляют управление антеннами 4 и получают через них информацию от радиочастотных меток 2.
Антенны 4 по командам от считывающих устройств 5 осуществляют генерацию радиочастотных излучающих импульсов на опрос радиочастотных меток 2 и получают ответный сигнал от радиочастотных меток 2.
В блоке определения характеристик идентифицируемых объектов 9 по сигналам, получаемым от считывателей информации 5 и блока задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов 7, осуществляется идентификация хранящихся на станции объектов и определение их характеристик (спецификаций, сроков годности и др.). Идентификация объектов выполняется путем сопоставления данных радиочастотных меток, полученных от считывателей информации 5, с заданными значениями параметров всего массива радиочастотных меток, хранящихся в блоке задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов 7 (в данном блоке могут храниться параметры радиочастотных меток и характеристик объектов как для уже доставленных на борт объектов, так и для объектов, удаленных со станции и/или еще планирующихся к доставке на борт).
В блоке определения параметров местоположения идентифицируемых объектов 10 по сигналам, получаемым от считывателей информации 5, блока задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов 7 и блока задания значений параметров местоположения антенн 8, осуществляется определение параметров местоположения идентифицируемых объектов в модулях космической станции. Определение параметров местоположения идентифицируемых объектов выполняется путем сопоставления данных радиочастотных меток, полученных от считывателей информации 5, с заданными значениями параметров радиочастотных меток, хранящихся в блоке задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов 7, и заданными значениями параметров местоположения антенн 4, с которыми соединены данные считыватели информации 5.
В блоке определения параметров положения космонавта 12 определяют параметры текущего положения космонавта. Например, параметры текущего положения космонавта могут быть получены с использованием системы определения положения объекта (космонавта) относительно КА (патент РФ RU 2600039 С1, 20.10.2016, бюл. №29), выполненной с использованием размещенных на космонавте излучателей инфракрасных импульсных сигналов и размещенных на КА детекторов инфракрасного излучения. При этом определяемые с помощью указанной системы параметры текущего положения космонавта наряду с местоположением космонавта могут включать информацию об ориентации космонавта относительно КА и информацию о текущей форме и ориентации космонавта - выпрямлен или согнут/сложен космонавт с указанием возможного диапазона углов между подвижными частями космонавта и в какую сторону он сориентирован (объем и точность информации о текущей форме и ориентации космонавта определяется количеством излучателей инфракрасных сигналов, установленных на разных подвижных частях космонавта).
В блоке определения последовательности использования идентифицируемых объектов 11 по сигналам, получаемым от блока определения характеристик идентифицируемых объектов 9, блока определения параметров местоположения идентифицируемых объектов 10 и блока определения параметров положения космонавта 12, осуществляется составление (определение) последовательности использования идентифицируемых объектов с учетом текущего положения космонавта и определенных характеристик и параметров текущего местоположения идентифицируемых объектов в модулях космической станции. Например, определение последовательности использования идентифицируемых объектов может выполняться путем сопоставления их сроков годности, при котором объекты отбираются для использования последовательно в порядке окончания их сроков хранения/использования на борту станции.
В блоке определения маршрута передвижения космонавта 13 по сигналам, получаемым от блока определения характеристик идентифицируемых объектов 9, блока определения параметров местоположения идентифицируемых объектов 10, блока определения последовательности использования идентифицируемых объектов 11 и блока определения параметров положения космонавта 12, осуществляется определение маршрута необходимого передвижения космонавта по космической станции из его текущего положения к требуемым (целевым) объектам, выбираемым из общего числа идентифицируемых объектов, размещенных в средствах хранения идентифицируемых объектов 3. Указанный маршрут определяется с учетом составленной последовательности использования космонавтом идентифицируемых объектов 1, характеристик идентифицируемых объектов (спецификаций, сроков годности и др.) и параметров текущего местоположения идентифицируемых объектов в модулях космической станции. Например, возможно определение маршрута как к одному текущему целевому объекту, так и к нескольким целевым объектам, которые должны быть последовательно доступны космонавту для использования, т.е. через месторасположения которых должен последовательно проходить определяемый маршрут передвижения космонавта.
В блоке формирования команд на передвижение космонавта 14 по сигналам, получаемым от блока определения маршрута передвижения космонавта 13, осуществляется формирование команд на передвижение космонавта из его текущего положения к идентифицируемым объектам 1 по вышеопределенному маршруту.
Опишем технический эффект предлагаемого изобретения.
Предлагаемое изобретение обеспечивает при управлении передвижением космонавта оперативный учет характеристик (спецификаций, сроков годности и др.) хранящихся на космической станции идентифицируемых объектов, а также параметров текущего расположения космонавта относительно требуемых (целевых) идентифицируемых объектов, в направлении к которым ему необходимо совершить перемещения.
В том числе предлагаемое изобретение обеспечивает возможность выполнения оперативной идентификации (и инвентаризации) хранящихся на станции перемещаемых объектов хранения, включая оперативное определение их характеристик и текущего местоположения. Для этого используются специализированные установленные в модулях космической станции средства хранения идентифицируемых объектов, которые обеспечивают возможность создания требуемых в космическом полете условий хранения объектов. В том числе данные условия хранения включают учет возникающих на КА перегрузок и невесомости, что позволяет выполнить указанные средства хранения идентифицируемых объектов таким образом, чтобы исключить возможность самопроизвольного перемещения объектов хранения, что обеспечивает необходимую надежность считывания RFID-меток (за счет поддержания необходимого взаимного положения RFID-меток и антенн считывающего устройства), а также исключает возможность повреждения хрупких объектов хранения (за счет исключения возможности ударов объектов хранения о жесткие конструктивные элементы).
Предлагаемые способ и система обеспечивают возможность их применения для любого большого количества разнообразных объектов, которые имеют различные сроки годности хранения и использования и которые имеют различное, в общем случае меняющееся расположение в модулях космической станции.
Наряду с отмеченным техническим эффектом предлагаемое устройство в процессе выполнения всех операций, связанных с его применением и эксплуатацией, обеспечивает необходимую эргономичность его применения/эксплуатации как для космонавтов, так и для операторов, обеспечивающих управление полетом КА. Предлагаемые способ и система обеспечивают возможность удобного и быстрого наращивания количества используемых объектов и соответствующих им радиочастотных меток, количества используемых средств хранения идентифицируемых объектов, а также обеспечивают возможность их применения/использования в условиях изменения конфигурации космической станции и изменений количества космонавтов на ее борту.
Предлагаемые способ и система позволяет повысить эффективность управления пилотируемым КА, в том числе за счет минимизации времени проведения идентификации (и инвентаризации) хранящихся на КА перемещаемых объектов хранения и минимизации времени перемещения космонавта к хранящимся на КА требуемым (целевым) идентифицируемым объектам.
Достижение технического результата в предложенном способе обеспечивается введением предложенных действий/операций и предложенных условий их выполнения. Достижение технического результата в предложенной системе обеспечивается введением предложенных блоков, а также введением предложенных функциональных связей между блоками и предложенным исполнением уже известных блоков.
В настоящее время технически все готово для реализации предложенного способа. Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено с использованием существующих технических средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПЕРЕДВИЖЕНИЯ КОСМОНАВТА ОТНОСИТЕЛЬНО КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2604892C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ИДЕНТИФИКАЦИИ ПЕРЕМЕЩАЕМЫХ ОБЪЕКТОВ НА КОСМИЧЕСКОМ АППАРАТЕ | 2017 |
|
RU2665914C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПРЕИМУЩЕСТВЕННО ОТНОСИТЕЛЬНО КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2600039C1 |
| СПОСОБ КОНТРОЛЯ ДЕЙСТВИЙ НАХОДЯЩЕГОСЯ НА БОРТУ КОСМИЧЕСКОГО АППАРАТА КОСМОНАВТА | 2016 |
|
RU2652721C2 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| СПОСОБ КОНТРОЛЯ НЕШТАТНЫХ СИТУАЦИЙ НА ПИЛОТИРУЕМОМ КОСМИЧЕСКОМ АППАРАТЕ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2603814C1 |
| СПОСОБ КОНТРОЛЯ ГОТОВНОСТИ ЭКИПАЖА КОСМИЧЕСКОГО АППАРАТА К НЕШТАТНЫМ СИТУАЦИЯМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2605230C1 |
| СПОСОБ БЕССПУТНИКОВОЙ НАВИГАЦИИ | 2016 |
|
RU2642507C1 |
| СИСТЕМА МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2422641C1 |
| СИСТЕМА УЧЁТА, НАВИГАЦИИ И МОНИТОРИНГА ОБЪЕКТОВ | 2017 |
|
RU2648967C1 |
Изобретение относится к космической технике. Способ управления передвижением космонавта к идентифицируемым объектам на космической станции включает определение параметров текущего положения космонавта и формирование команд на передвижение космонавта к идентифицируемым объектам. Дополнительно осуществляют измерение параметров сигнала, генерируемого считывателями информации от антенн, излучающих импульсы на опрос радиочастотных меток и получающих ответный сигнал от радиочастотных меток, размещенных на идентифицируемых объектах, расположенных в установленных на космической станции средствах их хранения, снабженных упомянутыми антеннами и считывателями информации. По значениям параметров сигнала, генерируемого считывателями информации, и заданным значениям параметров местоположений антенн определяют значения параметров местоположений радиочастотных меток, по которым осуществляют идентификацию и определяют характеристики и параметры текущего местоположения идентифицируемых объектов на космической станции, после чего формируют команды на передвижение космонавта из его текущего положения к идентифицируемым объектам по маршруту, определенному с учетом характеристик и параметров текущего местоположения идентифицируемых объектов на космической станции. Система управления передвижением космонавта к идентифицируемым объектам на космической станции включает блок определения параметров положения космонавта, блок определения маршрута передвижения космонавта, блок формирования команд на передвижение космонавта. Дополнительно идентифицируемые объекты снабжены радиочастотными метками и введены установленные на космической станции средства хранения идентифицируемых объектов, каждое из которых содержит антенну для обнаружения радиочастотных меток и связанное с ней считывающее устройство, блок формирования управляющих воздействий на считывающие устройства, блок задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов, блок задания значений параметров местоположения антенн, блок определения характеристик идентифицируемых объектов, блок определения параметров местоположения идентифицируемых объектов, блок определения последовательности использования идентифицируемых объектов. Технический результат – обеспечение оперативного учета характеристик идентифицируемых объектов и параметров текущего расположения космонавта относительно идентифицируемых объектов. 2 н.п. ф-лы, 1 ил.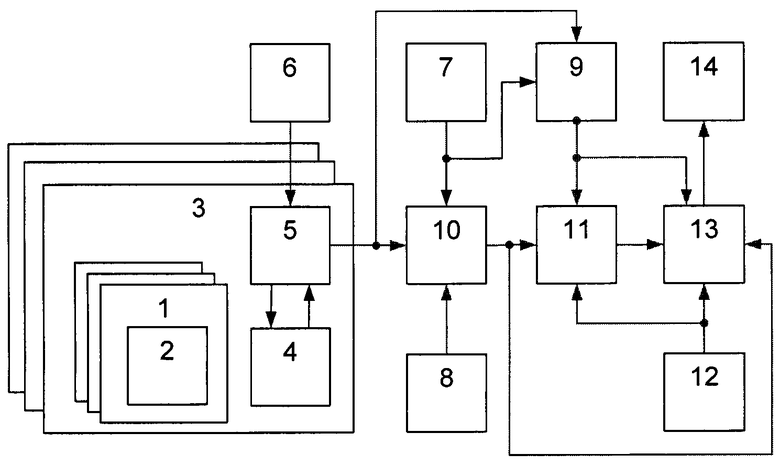
1. Способ управления передвижением космонавта к идентифицируемым объектам на космической станции, включающий определение параметров текущего положения космонавта и формирование команд на передвижение космонавта к идентифицируемым объектам, отличающийся тем, что дополнительно осуществляют измерение параметров сигнала, генерируемого считывателями информации от антенн, излучающих импульсы на опрос радиочастотных меток и получающих ответный сигнал от радиочастотных меток, размещенных на идентифицируемых объектах, расположенных в установленных на космической станции средствах их хранения, снабженных упомянутыми антеннами и считывателями информации, по значениям параметров сигнала, генерируемого считывателями информации, и заданным значениям параметров местоположений антенн определяют значения параметров местоположений радиочастотных меток, по которым осуществляют идентификацию и определяют характеристики и параметры текущего местоположения идентифицируемых объектов на космической станции, после чего формируют команды на передвижение космонавта из его текущего положения к идентифицируемым объектам по маршруту, определенному с учетом характеристик и параметров текущего местоположения идентифицируемых объектов на космической станции.
2. Система управления передвижением космонавта к идентифицируемым объектам на космической станции, включающая блок определения параметров положения космонавта, выход которого соединен с первым входом блока определения маршрута передвижения космонавта, выход которого соединен со входом блока формирования команд на передвижение космонавта, отличающаяся тем, что дополнительно идентифицируемые объекты снабжены радиочастотными метками и введены установленные на космической станции средства хранения идентифицируемых объектов, каждое из которых содержит антенну для обнаружения радиочастотных меток и связанное с ней считывающее устройство, блок формирования управляющих воздействий на считывающие устройства, блок задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов, блок задания значений параметров местоположения антенн, блок определения характеристик идентифицируемых объектов, блок определения параметров местоположения идентифицируемых объектов, блок определения последовательности использования идентифицируемых объектов, при этом выход блока формирования управляющих воздействий на считывающие устройства соединен с первым входом считывающего устройства, второй вход и первый выход которого соединены с соответственно выходом и входом антенны, причем второй выход считывающего устройства соединен с первыми входами блока определения характеристик идентифицируемых объектов и блока определения параметров местоположения идентифицируемых объектов, вторые входы которых соединены с выходами соответственно блока задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов и блока задания значений параметров местоположения антенн, а выходы соединены с соответственно первым и вторым входами блока определения последовательности использования идентифицируемых объектов, третий вход и выход которого соединены с соответственно выходом блока определения параметров положения космонавта и вторым входом блока определения маршрута передвижения космонавта, третий и четвертый входы которого соединены с выходами соответственно блока определения характеристик идентифицируемых объектов и блока определения параметров местоположения идентифицируемых объектов, третий вход которого также соединен с выходом блока задания значений параметров радиочастотных меток и характеристик идентифицируемых объектов.
| СПОСОБ КОНТРОЛЯ ПЕРЕДВИЖЕНИЯ КОСМОНАВТА ОТНОСИТЕЛЬНО КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2604892C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПРЕИМУЩЕСТВЕННО ОТНОСИТЕЛЬНО КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2600039C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОЧАСТОТНЫХ МЕТОК | 2011 |
|
RU2472218C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ПЕРЕДВИЖЕНИЯ ПЕРСОНАЛА | 2010 |
|
RU2442220C1 |
| US 7962285 B2, 14.06.2011. | |||

