Изобретение относится к электротехнике, в частности к электродвигателям с использованием магнитострикционных или пьезоэлектрических элементов, применяемых в качестве исполнительных механизмов для прецизионных шаговых перемещений.
Аналогом является линейный стрикционный электродвигатель привода двухкоординатного сканирующего устройства (Авторское свидетельство СССР №1718355, заявл. 20.11.1989, МПК H02N 2/00, H01L 41/12). Сканирующее устройство содержит основание, четыре магнитострикционных двигателя, которые выполнены в виде трубок и соединены крестообразно одними своими торцами. Другими своими торцами два соосных магнитострикционных двигателя соединены с основанием. Два других магнитострикционных двигателя соединены с объектом управления. Причем каждые два соосных магнитострикционных двигателя охвачены одной тороидальной обмоткой, а витки их цилиндрических обмоток направлены встречно. Недостатком такого стрикционного электродвигателя является ограниченная возможность перемещения объекта управления, что снижает функциональные возможности его подвижной части.
Прототипом является известный стрикционный шаговый электродвигатель (см. Патент РФ №1685230\. заявл. 30.10.1989, МПК H02N 2/00, H01L 41/12). Двигатель содержит неподвижную часть с направляющими из магнитомягкого материала и подвижную часть, состоящую из стрикционного элемента с обмоткой возбуждения, закрепленного между двумя фиксаторами из магнитомягкого материала, концы которых оперты на направляющие, постоянный магнит, размещенный между направляющими, и обмотки управления. При этом обмотки управления размещены на подвижной части по обе стороны относительно обмотки возбуждения стрикционного элемента. Постоянный магнит установлен на подвижной части на равном расстоянии от обмоток управления. Недостатком такого стрикционного шагового электродвигателя является возможность перемещения объекта управления только в поле, ограниченном направляющими из магнитомягкого материала, что снижает функциональные возможности его подвижной части.
Цель предлагаемого изобретения - расширение функциональных возможностей перемещения объекта управления линейного стрикционного шагового электродвигателя.
Для достижения поставленной цели неподвижное основание линейного стрикционного шагового электродвигателя выполнено в виде плоскости из магнитомягкого материала. Стрикционные элементы с обмотками возбуждения ориентированы ортогонально по отношению друг к другу в плоскости, параллельной плоскости неподвижного основания. Каждый из стрикционных элементов прикреплен одним своим концом к объекту управления, а другим - к своему фиксатору.
Прилагаемые чертежи изображают
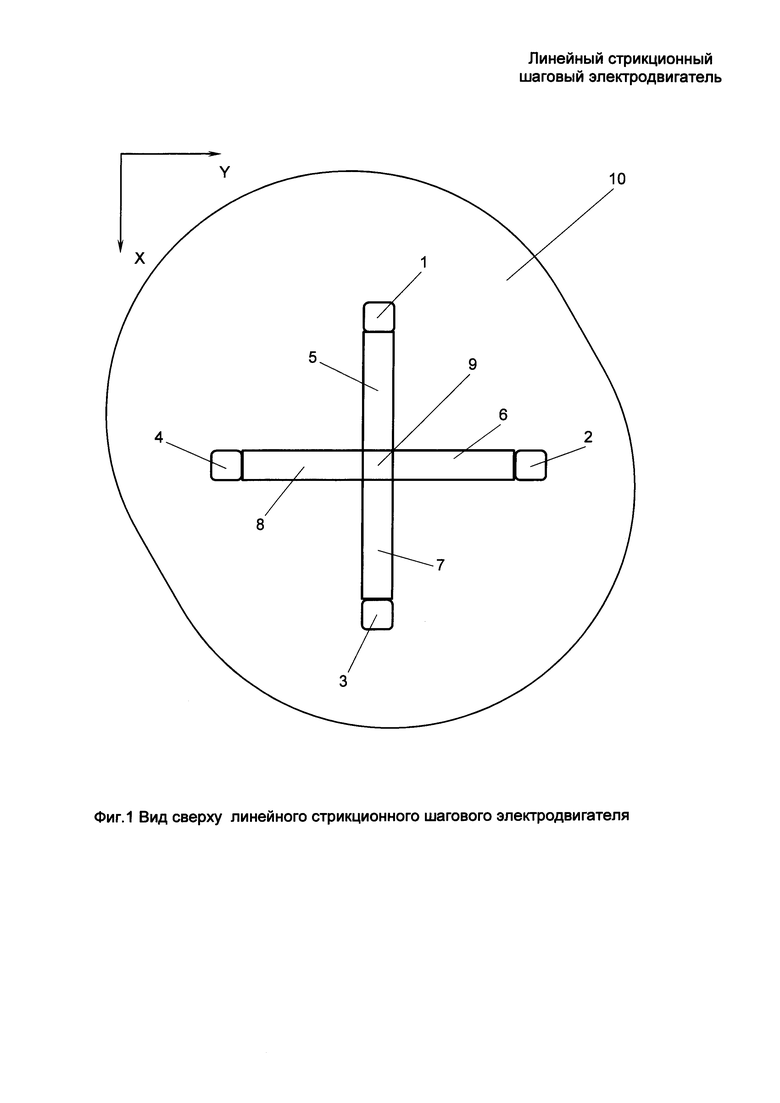
Фиг. 1 - вид сверху линейного стрикционного шагового электродвигателя;
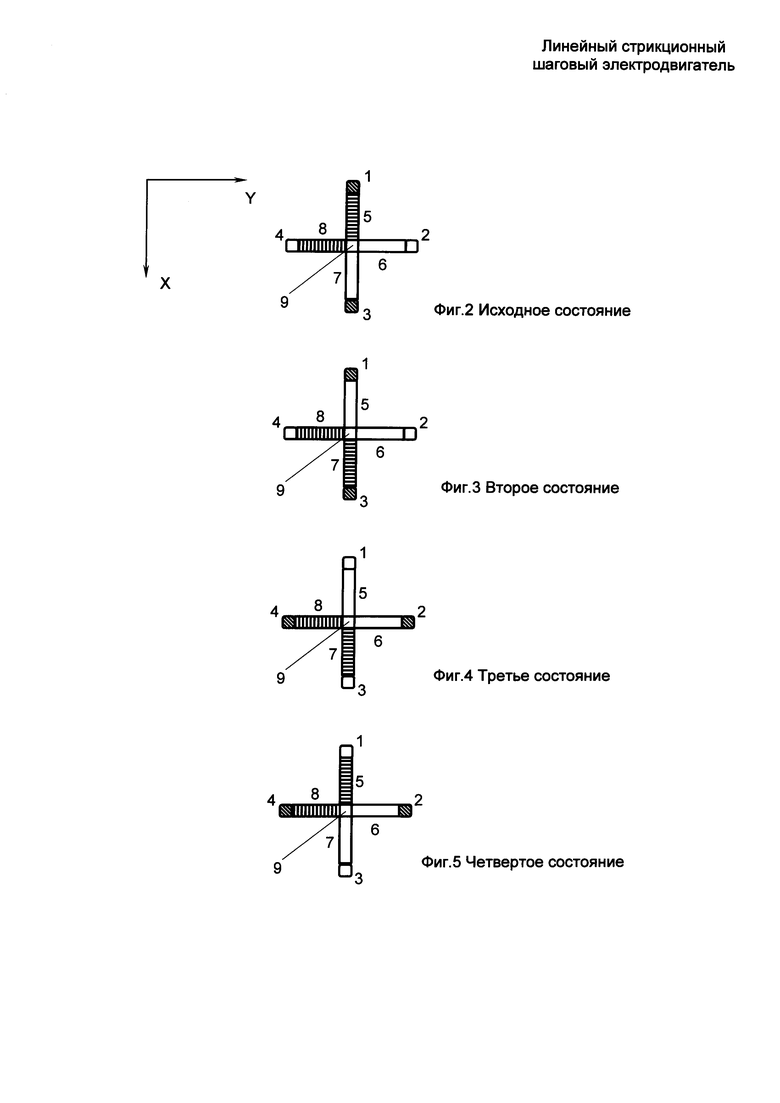
Фиг. 2 - исходное состояние;
Фиг. 3 - второе состояние;
Фиг. 4 - третье состояние;
Фиг. 5 - четвертое состояние.
Перечень элементов на прилагаемых чертежах
1, 2, 3, 4 - фиксатор;
5, 6, 7, 8 - стрикционный элемент;
9 - объект управления;
10 - неподвижное основание.
Линейный стрикционный шаговый электродвигатель состоит (см. фиг. 1) из фиксаторов 1, 2, 3, 4, выполненных в виде электромагнитов и прикрепленных к соответствующим стрикционным элементам 5, 6, 7, 8, на которых размещены обмотки возбуждения и которые ориентированы ортогонально друг к другу в плоскости, параллельной плоскости неподвижного основания 10. Другими своими концами стрикционные элементы 5, 6, 7, 8 прикреплены к объекту управления 9.
На фиг. 1 представлен вид сверху линейного стрикционного шагового электродвигателя. Ортогональные оси X и Y обозначены в верхнем левом углу чертежа. На фиг. 2 - фиг. 5 показаны состояния линейного стрикционного шагового электродвигателя при движении по оси X. Ортогональные оси X и Y обозначены в верхнем левом углу чертежа. При этом поперечная штриховка на стрикционных элементах 5,6,7,8 обозначает их сжатие под действием магнитного поля обмоток возбуждения при подключении их к источнику электроэнергии. Косая штриховка на фиксаторах 1,2,3,4 обозначает, что на обмотки электромагнитов фиксаторов подано напряжение от источника электроэнергии, и они под действием магнитного поля электромагнитов фиксируют положение фиксатора на неподвижном основании 10 из магнитомягкого материала.
Движение линейного стрикционного шагового электродвигателя по оси X происходит следующим образом. В исходном положении (см. фиг. 2) стрикционные элементы 5 и 8 находятся под действием магнитного поля их обмоток возбуждения, которые подключены к источнику электроэнергии. Фиксаторы 1 и 3, обмотки электромагнитов которых подключены к источнику электроэнергии, фиксируют положение стрикционных элементов 5 и 7. Далее (см. фиг. 3) обмотку возбуждения стрикционного элемента 5 отключают от источника электроэнергии, а обмотку возбуждения стрикционного элемента 7 подключают к источнику электроэнергии. Под действием сил сжатия стрикционного элемента 7 и расширения стрикционного элемента 5 объект управления 9 вместе со стрикционными элементами 6 и 8 и фиксаторами 2 и 4 перемещается вдоль оси X на один шаг. Затем (см. фиг. 4) подключают к источнику электроэнергии обмотки электромагнитов фиксаторов 2 и 4, которые фиксируют положение стрикционных элементов 6 и 8, и отключают от источника электроэнергии обмотки электромагнитов фиксаторов 1 и 3. Далее (см. фиг. 5) обмотку возбуждения стрикционного элемента 5 подключают к источнику электроэнергии, а обмотку возбуждения стрикционного элемента 7 отключают от источника электроэнергии. В результате фиксаторы 1 и 3 перемещаются на один шаг по оси X. После этого (см. фиг. 2) подключают к источнику электроэнергии обмотки электромагнитов фиксаторов 1 и 3, которые фиксируют положение стрикционных элементов 5 и 7, и отключают от источника электроэнергии обмотки электромагнитов фиксаторов 2 и 4. В результате линейный стрикционный шаговый электродвигатель принимает исходное состояние для следующего шага по оси X. Аналогично можно описать алгоритм движения линейного стрикционного шагового электродвигателя по оси Y.
Таким образом, осуществляется расширение функциональных возможностей объекта управления 9 линейного стрикционного шагового электродвигателя по всему пространству неподвижного основания 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ СТРИКЦИОННЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1982 |
|
RU1111649C |
| Линейный стрикционный шаговый электродвигатель | 1978 |
|
SU738015A1 |
| Электромагнитный рельсовый привод с третьим рельсом | 2016 |
|
RU2647092C1 |
| СТРИКЦИОННЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU1685230C |
| Дисковый электромеханический тормоз | 2016 |
|
RU2645574C1 |
| Осевой электромеханический тормоз | 2016 |
|
RU2645583C1 |
| Электромагнитный рельсовый привод с рельсовыми полюсами | 2016 |
|
RU2646397C1 |
| Электромагнитный рельсовый привод с полюсными креплениями | 2016 |
|
RU2646398C1 |
| Колесный электромеханический тормоз | 2017 |
|
RU2649845C1 |
| Колесный электропривод самолета | 2016 |
|
RU2639375C1 |
Изобретение относится к электротехнике, к электродвигателям с использованием магнитострикционных или пьезоэлектрических элементов, применяемых в качестве исполнительных механизмов для прецизионных шаговых перемещений. Технический результат заключается в расширении функциональных возможностей перемещения. Линейный стрикционный шаговый электродвигатель содержит фиксаторы, стрикционные элементы и неподвижное основание, выполненное в виде плоскости из магнитомягкого материала. Стрикционные элементы с обмотками возбуждения ориентированы ортогонально по отношению друг к другу в плоскости, параллельной плоскости основания. Каждый из стрикционных элементов прикреплен одним своим концом к объекту управления, а другим - к своему фиксатору. 5 ил.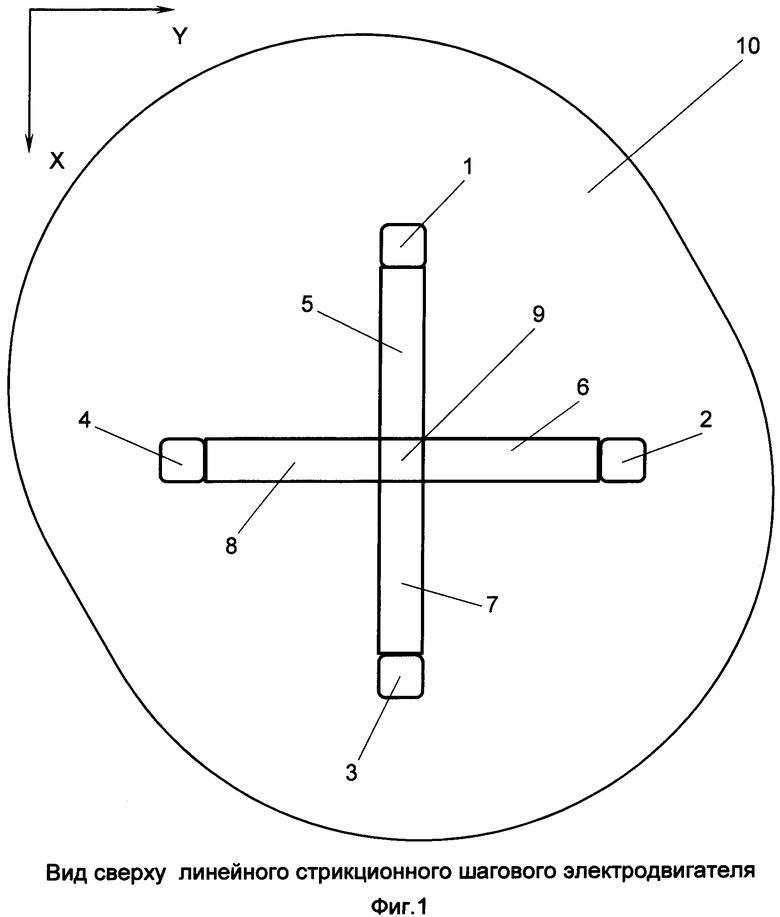
Линейный стрикционный шаговый электродвигатель, содержащий фиксаторы, стрикционные элементы и неподвижное основание, отличающийся тем, что его неподвижное основание выполнено в виде плоскости из магнитомягкого материала, стрикционные элементы с обмотками возбуждения ориентированы ортогонально по отношению друг к другу в плоскости, параллельной плоскости неподвижного основания, каждый из стрикционных элементов прикреплен одним своим концом к объекту управления, а другим - к своему фиксатору.
| СТРИКЦИОННЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU1685230C |
| Двухкоординатный шаговый двигатель | 1986 |
|
SU1398040A1 |
| Магнитострикционный шаговый двигатель линейных перемещений | 1986 |
|
SU1369619A1 |
| GB 1261523 A, 26.01.1972. | |||

