(54) ЛИНЕЙНЫЙ СТРИКЦИОННЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ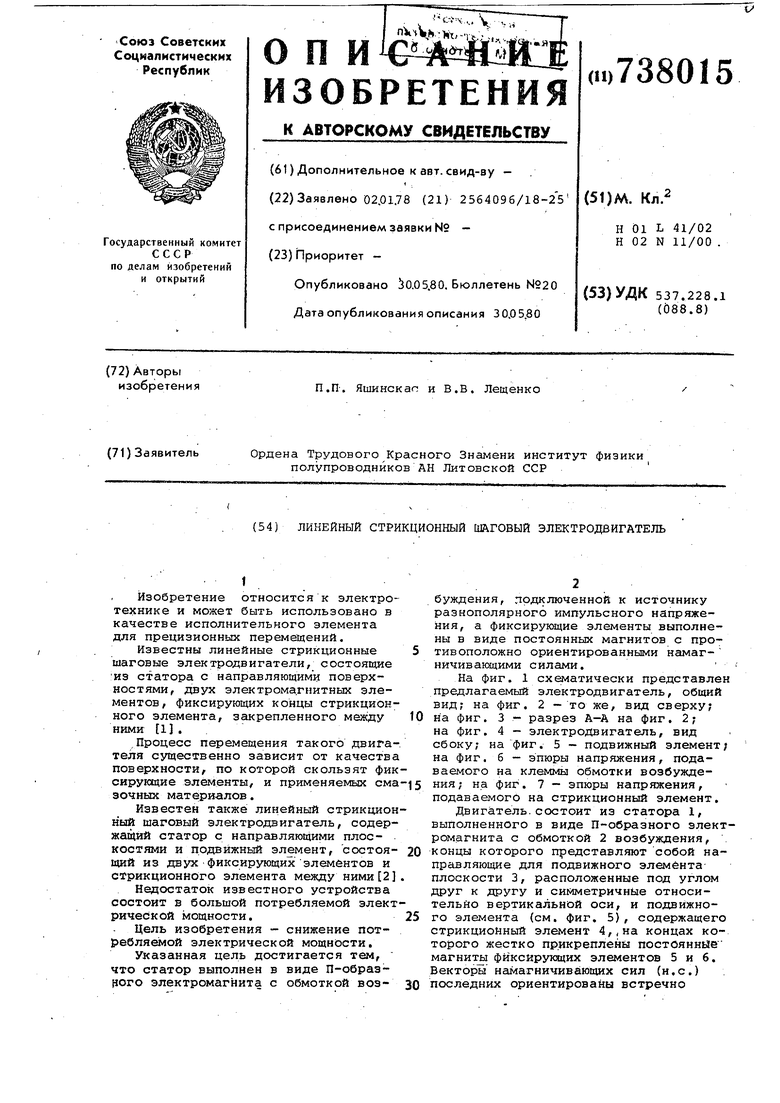
- I
Изобретение относится к электротехнике и может быть использовано в качестве исполнительного элемента для прецизионных перемещений.
Известны линейные стрикционные 5 шаговые электродвигатели, состоящие ИЗ статора с направляющими поверхностями, двух электромагнитных элементов, фиксирующих концы стрикционного элемента, закрепленного между 10 ними 1.
,Процесс перемещения такого двигателя существенно зависит от качества поверхности, по которой скользят фиксирующие элементы, и применяемых сма- 5 зочных материалов.
Известен также линейный стрикционный шаговый электродвигатель, содержащий статор с направляго1аими плоскостями и подвижный элемент, состоя- 20 щий из двухфиксирующихэлементов и сФрикционного элемента между .
Недостаток известного устройства состоит в большой потребляемой электрической мощности.25
Цель изобретения - снижение потребляемой электрической мощности.
Указанная цель достигается тем, что статор выполнен в виде П-образрого электромагнита с обмоткой воз- ЗО
буждения, подключенной к источнику разнополярного импульсного напряжения, а фиксирующие элементы выполнены в виде постоянных магнитов с противоположно ориентированными намагнйчивающими силами.
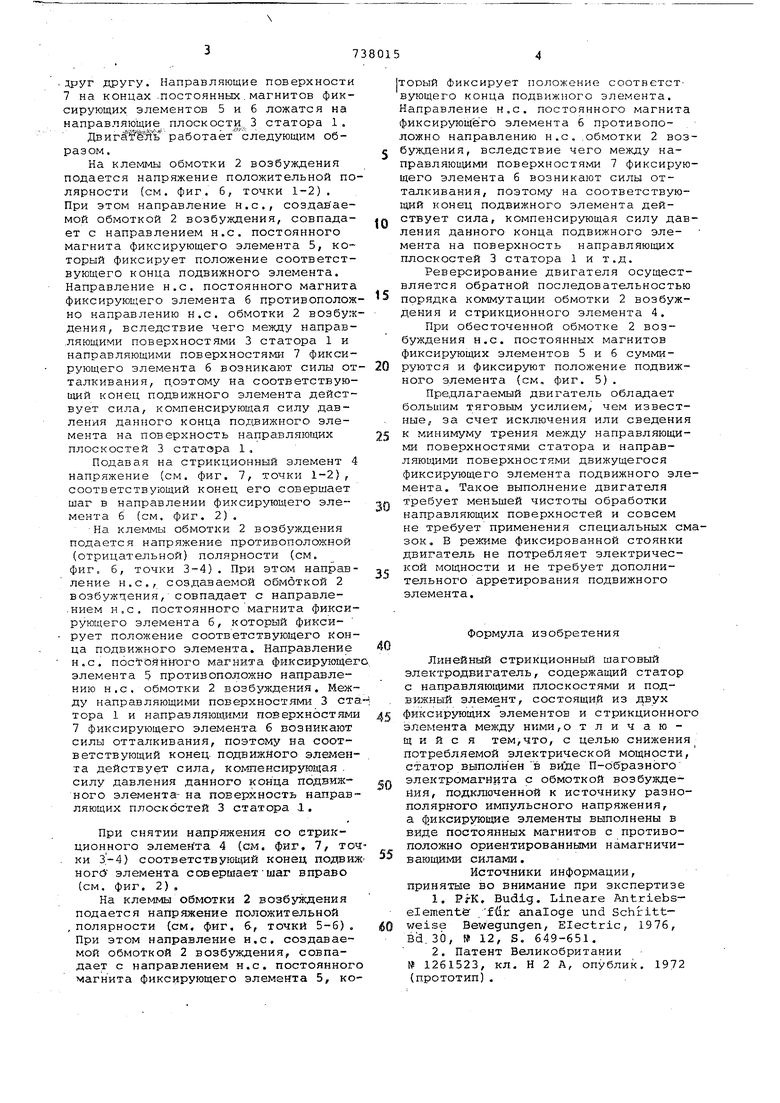
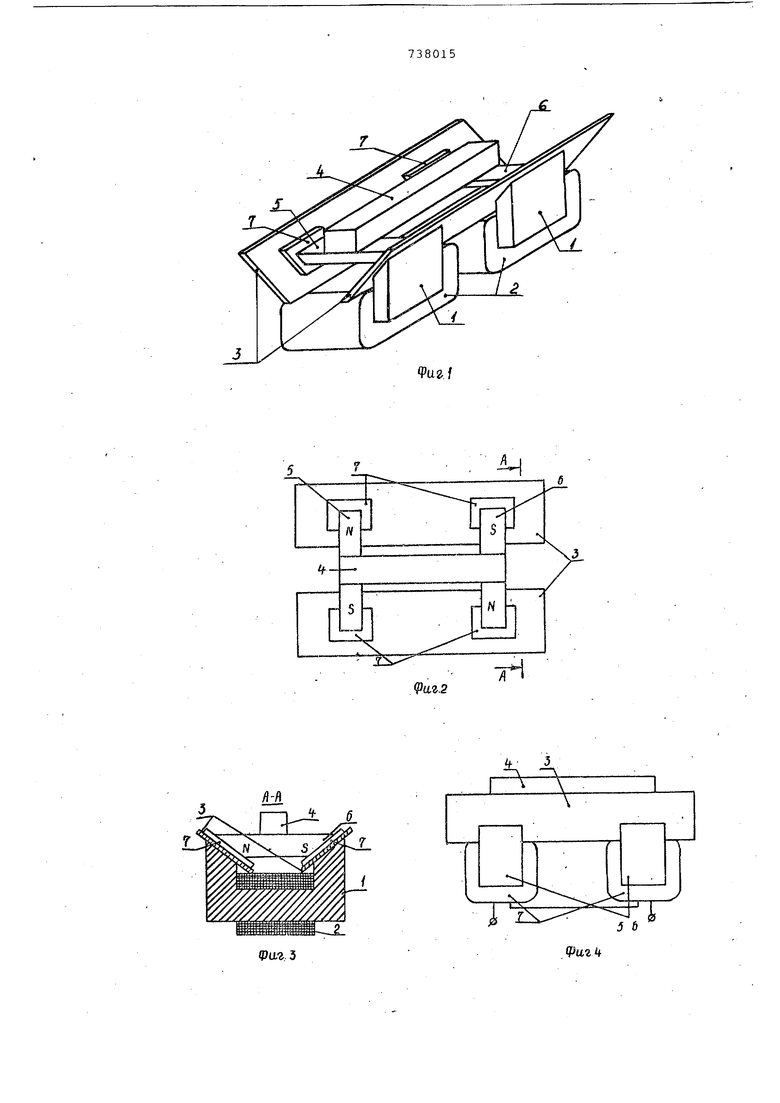
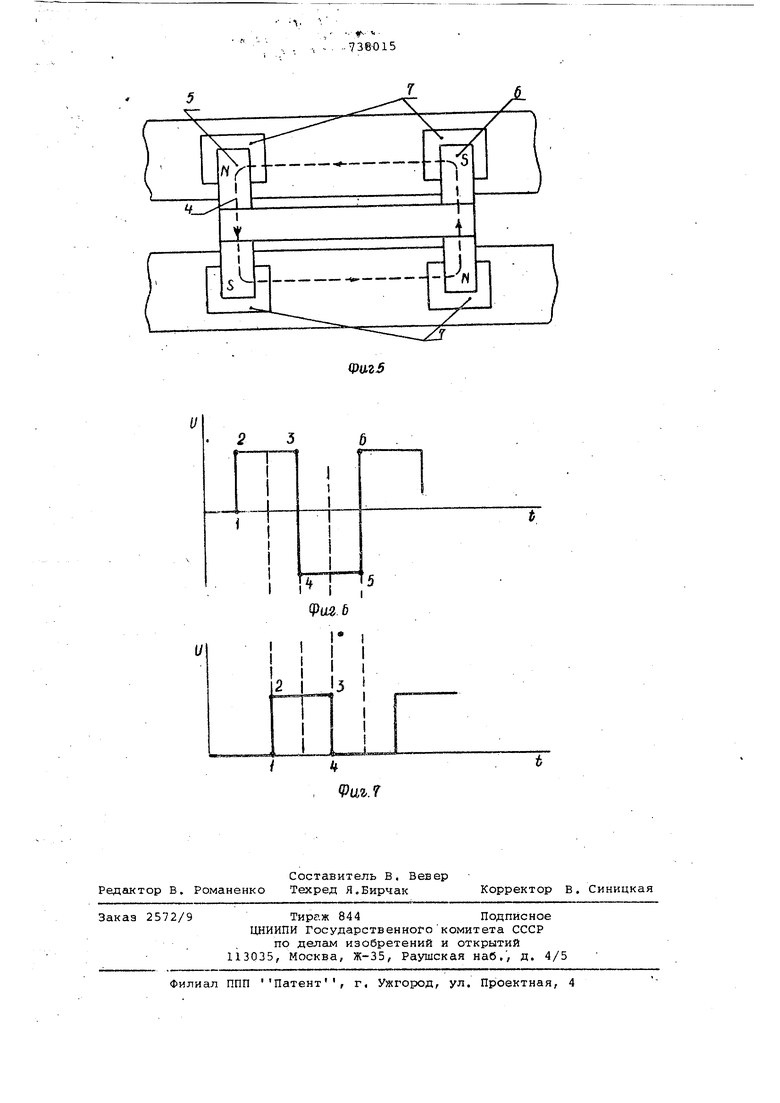
На фиг. 1 схематически представлен предлагаемый электродвигатель, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - электродвигатель, вид сбоку; на фиг. 5 - подвижный элемент; на фиг. 6 - эпюры напряжения, подаваемого на клеммы обмотки возбуждения ; на фиг. 7 - эпюры напряжения, подаваемого на стрикционный элемент.
Двигатель, состоит из статора 1, выполненного в виде П-образного электромагнита с обмоткой 2 возбуждения, концы которого представляют собой направляющие для подвижного элементаплоскости 3, расположенные под углом друг к другу и симметричные относительно вертикальной оси, и подвижного элемента (см. фиг. 5), содержащего стрикционный элемент 4,,на концах которого жестко прикреплены постоянные магниты фиксирующих элементов 5 и 6. Векторы намагничивак)щих сил (н.с.) последних ориентированы встречно
друг другу. Направляющие поверхности на концах .постоянных.магнитов фикирующих элементов 5 и б ложатся на аправляющие плоскости 3 статора 1, Двиг 1Йъ работает следующим обазом.
На клеммы обмотки 2 возбуждения одается напряжение положительной поярности (см. фиг. 6, точки 1-2). ри этом направление н.с,, создаваеой обмоткой 2 возбуждения, совпадает с направлением н.с. постоянного магнита фиксирующего элемента 5, который фиксирует положение соответствующего конца подвижного элемента. Направление н.с, постоянного магнита фиксирующего элемента б противоположно направлению н.с. обмотки 2 возбуждения, вследствие чего между направяющими поверхностями 3 статора 1 и направляющими поверхностями 7 фиксирующего элемента б возникают силы отталкивания, п.оэтому на соответствующий конец подвижного элемента действует сила, компенсирующая силу давления данного конца подвижного элемента на поверхность направляющих плоскостей 3 статора 1,
Подавая на стрикционный элемент 4 напряжение (см. фиг. 7, точки 1-2), соответствующий конец его совершает шаг в направлении фиксирующего элемента б (см. фиг. 2).
На клеммы обмотки 2 возбуждения подается напряжение противоположной (отрицательной) полярности (см, фиг. 6, точки 3-4). При этом направление Н.С., создаваемой обмоткой 2 возбуждения, совпадает с направле.нием н.с. постоянного магнита фиксирующего элемента б, который фиксирует положение соответствую1цего конца подвижного элемента. Направление н.с. постЬянного магнита фиксирующего элемента 5 противоположно направлению и,с. обмотки 2 возбуждения. Между направляющими поверхностями 3 ста-. тора 1 и направляющими пойерхностями 7 фиксирующего элемента б возникают силы отталкивания, поэтому на соответствующий конец, подвижного элемента действует сила, ког шенсирующая . силу давления данного конца подвижного элемента- на поверхность направ ляющих плоскостей 3 статора 1.
При снятии напряжения со етрикционного элемента 4 (см, фиг, 7, точк и 3.-4) соответствующий конец подвижного элемента совершаетшаг вправо (см. фиг, 2) ,
На клеммы обмотки 2 возбуждения подается напряжение положительной , полярности (см. фиг. 6, точки 5-6) . При этом направление н.с. создаваемой обмоткой 2 возбуждения, совпадает с направлением н.с. постоянного магнита фиксирующего элемента 5, ко|торый фиксирует положение соответст. вующего конца подвижного элемента. Направление н.с. постоянного магнита фиксирующёго элемента б противоположно направлению н.с. .обмотки 2 возбуж,дения, вследствие чего между направляющими поверхностями 7 фиксирующего элемента 6 возникают силы отталкивания, поэтому на соответствующий КОН6ГЦ подвижного элемента действует сила, компенсирующая силу давления данного конца подвижного элемента на поверхность направляющих плоскостей 3 статора 1 и т.д.
Реверсирование двигателя осуществляется обратной последовательностью порядка коммутации обмотки 2 возбуждения и стрикционного элемента 4.
При обесточенной обмотке 2 возбуждения н.с. постоянных магнитов фиксирующих элементов 5 и б суммируются и фиксируют положение подвижного элемента (см, фиг. 5).
Предлагаемый двигатель обладает большим тяговым усилием, чем известные, за счет исключения или сведения к минимуму трения между направляющими поверхностями статора и направляющими поверхностями движущегося фиксирующего элемента подвижного элемента. Такое выполнение двигателя требует меньшей чистоты обработки направляющих поверхностей и совсем не требует применения специальных смзок, В режиме фиксированной стоянки двигатель не потребляет электрической мощности и не требует дополнительного арретирования подвижного элемента.
Формула изобретения
Линейный стрикционный шаговый электродвигатель, содержащий статор с направляю11 ими плоскостями и подвижный элемент, состоящий из двух фиксирующих элементов и стрикционног элемента между ними,о т л и ч а ю щ и и с я тем,что, с целью снижения потребляемой электрической мощности, статор выполнен в виде П-о 5разного электромагнита с обмоткой возбужде Мия, подключенной к источнику разнополярного импульсного напряжения, а фиксирующие элементы выполнены в виде постоянных магнитов с противоположно ориентированными намагничив ающими силами.
Источники информации, принятые во внимание при экспертизе
1,РгК. Budig. Lineare Antriebselementer /fur analoge und Schrittweise Bewegungen, Electric, 1976, ВЙ.30, 12, S. 649-651,
№ 1261523, кл. Н 2 A, опублик. 1972 (прототип).
5I
N
-Н
Фаг.2
- .
, ; , . , .. , ..738015
Фца.Г
Л
