1
13696
Изобретение относится к электротехнике, касается шаговых двигателей линейного перемещения, и может найти применение в высокоточных системах автоматического управления в станкостроении, оптико-механических устройствах и т.д.
Целью изобретения является повышение точности перемещения.
На фиг.1 изображен магнитострик- ционный двигатель линейных перемещений, разрез; на фиг.2 - то же, разрез Л-Л на фиг.1.
Двигатель содержит магнитострик- ционный рабочий орган 1, вьтолненный в виде рубки, на которой размещена намагничивающая катушка 2. Трубка снабжена продольными ребрами 3, на которых через отверстия А и пазы 5 намотаны обмотки намагничивания 6. Между рабрами 3 установлены зажимы 7 укрепленные на ферромагнитном кожухе 8 винтами 9 и имею1аие обмотки намагничивания 10, каждая из которых размещена в продольных пазах 11 и 12.
Вьтолненне ребер рабочего органа прямоугольными в поперечном сеченни . предполагает вьшолнение зажимов сегментными в поперечном сечении и наоборот. Возможны любые другие обратные исполнения зажимов и ребер, при условии, что контакт их происходит п их боковым поверхностям. Кроме того, знак магнитострикции материалов рабо чего органа (его ребер) и зажимов должен быть одинаков.
Устройство работает следующим образом.
В исходном состоянии намагничивающая катушка 2 обесточена, а по обмоткам 6 и 10 течет ток, за счет чег зажины 7 фиксируют ребра 3 рабочего органа. При обесточитзании одного из зажимов, например по фиг„1 верхнего, т.е. при одновременно выключении тока в верхних обмотках 6 и 10 их элементы под действием упругих сил сжимаются, что приводит к резкому уменьшению усилия зажатия. Далее подается ток в катушку 2, при этом рабочий орган удлиняется на относительную величину д 1/1 - 7 3 P/ES, где 1 - длина рабочего органа; Ад - относительная максимальная величина магнитострикции; Р - нагрузка; Е - модуль упругости; S - площадь трубки рабочего органа. Под действием магнитного потока, создаваемого кагутако
0
5
0
5
0
,,
g
40
5
0
192
2, замыкающегося через ребра 3 и ко- жух 8 двигателя, ребра удлиняются по направлению прохождения магнитнбго потока и укорачигзаются в перпендикулярном направлении по бокам ребер, еще больше растормаживая рабочий орган. После этого ток подается в обмотки верхнего зажима дпя фиксации рабочего перемещения. При этом возникает общий г-1агнитный поток, проходящий через зажкмы и ребра по кругу,. Далее обесточивается катугака 2 и обмотки намагничивания 6 и 10 нижнего зажима« При этом рабочш орган возвращается в исходное состояние. Цикл отработки шага заканчивается подачей тока в обмотки нижнего зажима.
Для перемещения вниз изменяется последовательность работы зажимов.
При выполнении рабочего органа и зажимов из материала с отрицательным коэффициентом магнитострикции рабочее состояние зажимов - обесточенное, а растормажнваниеосуществляют подачей токпв обмотки ребер и зажимов.
Выполнение рабочего органа в виде трубки с ребрами и фиксация его по боковым поверхностям ребер позволяет за счет большей жесткости исключить механические деформации рабочего органа, обусловливающие появление обратного магнитострикционного эффекта, чем увеличивается точность перемещения. Кроме того, использование по поперечной магнитострикции ребер увеличивает усилие фиксации зажимов. Ф ормула -из обретения
1.Магнитострикционный шаговый двигатель линейных перемещений, со- держап&ш Магнитострикционный рабочий орган и зажимы с обмотками намагничивания, отличающийся тем, что, с целью повып1е П1я точности перемещения, магнитострикщюнньпЧ рабочий орган выполнен в виде трубки с продольными ребрами, а зажи№л выполнены из магнитострикционного материала, имеющего тот же знак магнитострик1Ц1И, что и у материала рабочего органа, и закреплены на дополнительно введенном ферромагнитном кожухе между ребрами рабочего органа с возможностью контакта по их боковым поверхностям.
2.Двигатель поп.1,отлича- ю щ и и с я тем, что, с целью увеличения усилия фиксации, ребра рабочего органа снабжены обмотка1 ги намагничи- в ания.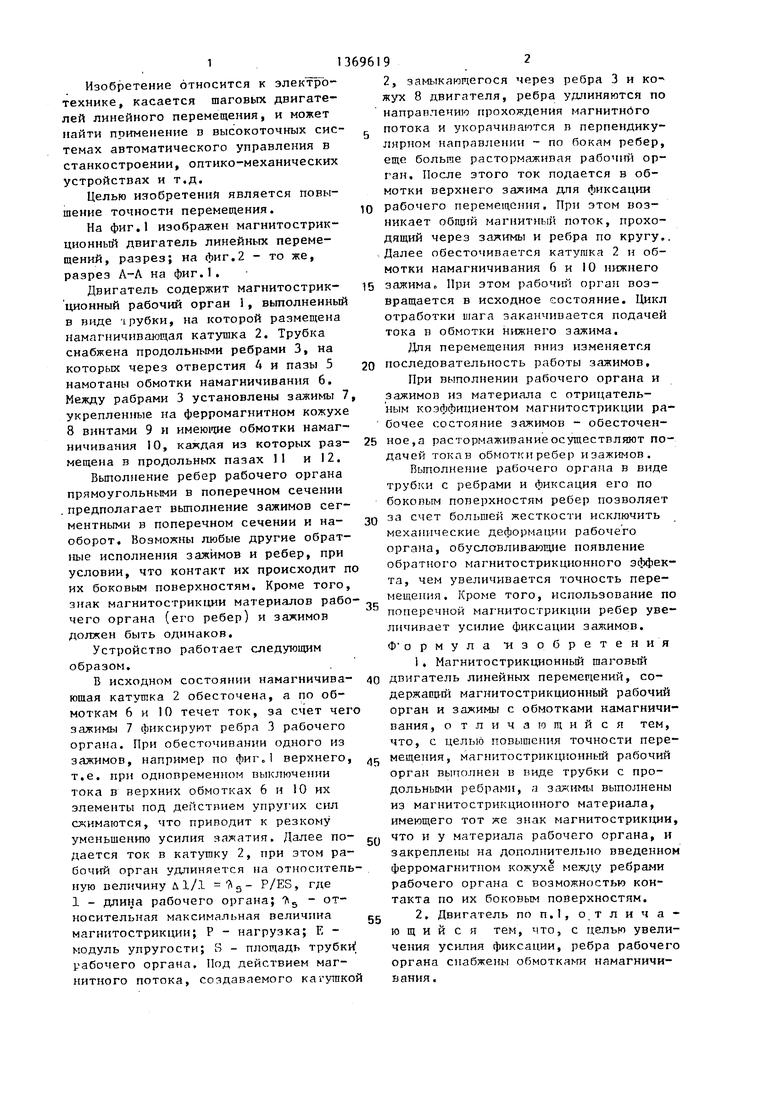
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитострикционный шаговый двигатель угловых перемещений | 1982 |
|
SU1091792A1 |
| Магнитострикционный шаговый двигатель | 1981 |
|
SU993791A1 |
| Способ управления линейным шаговым двигателем | 1987 |
|
SU1542375A1 |
| МАГНИТОСТРИКЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2074456C1 |
| Магнитострикционный шаговый двигатель | 1980 |
|
SU835287A1 |
| Способ управления магнитострикционным шаговым исполнительным устройством | 1988 |
|
SU1616488A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРИВОД МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU428910A1 |
| Силоизмерительный датчик | 1979 |
|
SU1004780A1 |
| Магнитострикционный двигатель | 1980 |
|
SU911659A1 |
| Магнитострикционное устройство линейных микроперемещений | 1984 |
|
SU1286030A1 |


Изобретение относится к электротехнике, касается шаговых двигателей линейного перемещения и может найти применение в высокоточных системах автоматического управления в станкостроении, оптико-механических устройствах и т.д. Целью изобретения является повышение -точности перемещения. Магнятострикционный шаговый двигатель линейных перемещений содержит рабочий орган в виде трубки с ребрами, ЗАЖИМЫ, замыкающий кожух. Зажимы размещены между ребрами рабочего органа и закреплены на кожухе. Рабочий орган, ребра и зажимы имеют обмотки намагничивания, вьтолнены Из материала с одинаковым коэффициентом магнитострикции. В исходном состоянии рабочий орган не намагничен, а зажцмы намагничены. Для отработки шага обесточивается один из зажимов. Затем питание подается на рабочий орган и он удлиняется. Новое его положение фиксируется первым зажимом, а второй зажим обесточивается. После обесточивания катушки рабочего органа питание подается на оба зажима. Наличие ребер исключает нежелательные деформации рабочего органа. Его зажим за боковые поверхности ребер усиливает фиксацию. Все это ведет к большей точности отработки шага перемещения. I з.п. ф-лы, 2 ил. г СО 05 ;о 05
Фиг.1
| Тормозное устройство | 1973 |
|
SU465502A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРИВОД МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU428910A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
