Анализ современных локальных и контртеррористических операций указывает на необходимость совершенствования разведывательной аппаратуры, в том числе и артиллерийских подразделений.
В настоящее время для ведения разведки в артиллерийских подразделениях широко используются лазерный прибор разведки ЛПР-1 (квантовый дальномер 1Д13) и перископическая артиллерийская буссоль ПАБ-2. Данные приборы являются основными в отделениях разведки буксируемых подразделений и артиллерийских разведывательных группах или используются в качестве приборов выносного (передового, бокового) наблюдательного пункта, выделяемого из состава подвижного разведывательного пункта самоходных артиллерийских подразделений.
Боевые действия в городских и горных условиях выявили ряд недостатков лазерного прибора разведки ЛПР-1 (квантового дальномера 1Д13):
- активный режим работы демаскирует местоположения прибора, так как противник имеет системы обнаружения и подавления оптико-электронных приборов;
- максимальная дальность действия прибора (до 20000 м) в условиях города (гор) используется не всегда;
- наличие треноги ограничивает передвижение артиллерийских разведчиков и увеличивает время подготовки прибора к работе и др.
Анализ условий ведения артиллерийской разведки по картам показывает, что дальность прямой видимости для холмистой и для среднепересеченной местности в среднем составляет 6...7 и 3...5 км соответственно. В горных и городских условиях эта дальность значительно ниже.
Исходя из данных условий, разрабатываемая малогабаритная разведывательная аппаратура должна позволять определять дальность:
- до 6..7 км в видимом диапазоне;
- до 5 км в ИК-диапазоне;
- до 3 км в УФ-диапазоне.
В настоящее время существует большое количество малогабаритных приемников, работающих в оптическом диапазоне электромагнитных волн, которые можно использовать для определения дальности. Наиболее эффективно использовать комбинированные приборы зарядовой связи (ПЗС). Это позволит регистрировать излучение от цели и фона сразу же в нескольких диапазонах электромагнитных волн, а также учесть демаскирующие параметры цели в различных участка спектра и в различных условиях распространения излучения (метеорологические условия прохождения сигнала, пыледымовые помехи и др.).
Для использования пассивной малогабаритной аппаратуры может быть выбран стереоскопический (базовый) метод измерения дальности.
Зрение двумя глазами (стереоскопическое зрение) позволяет человеку измерять расстояние пассивным способом на основе стереоскопического базового метода. Этот же способ положен в основу работы оптических дальномеров, например, состоящих на вооружении в качестве дублирующих (выносных и др.). Это артиллерийские стереоскопические дальномеры ДСП-30 (база 0,3 м), ДС-0,9, ДС-1, ДС-2 (база 0,9, 1,0 и 2,0 м соответственно) и зенитные дальномеры типа ЗДН и др. База приборов значительно увеличена по сравнению с базой глаз.
Сущность измерения расстояния с помощью оптических дальномеров лежит в решении измерительного треугольника Δ 123 (фиг.1). На фиг.1 приведен стереоскопический базовый метод измерения дальности. Дальность D до объекта 1 определяется по величине параллактического угла γ и по величине базы прибора Б, определяемой положением приемных зеркал 2 и 3
В приборе угол γ определяется исходя из величины линейного параллакса Р, измеренного по прибору как

где f - фокусное расстояние объективов прибора.
Значения Б и f являются постоянными величинами для прибора. По этому достаточно измерить Р, чтобы вычислить дальность до объекта D.
В работе предложен стереоскопический базовый метод измерения дальности. Данный способ пассивен, то есть не демаскирует процесс измерения, однако данный метод требует использования баз более 0,3 м. Чем больше база, тем выше точность изменения дальности.
Использование ПЗС позволяет решать задачи пространственной и временной селекции. Плоская матрица способна регистрировать перемещение объекта в двух плоскостях - «вправо-влево» и «вверх-вниз». Однако очевидно, что использование плоских линеек и матриц фотоприемников, плоскость которых перпендикулярна линии наблюдения, не позволит измерить дальность до объекта (цели).
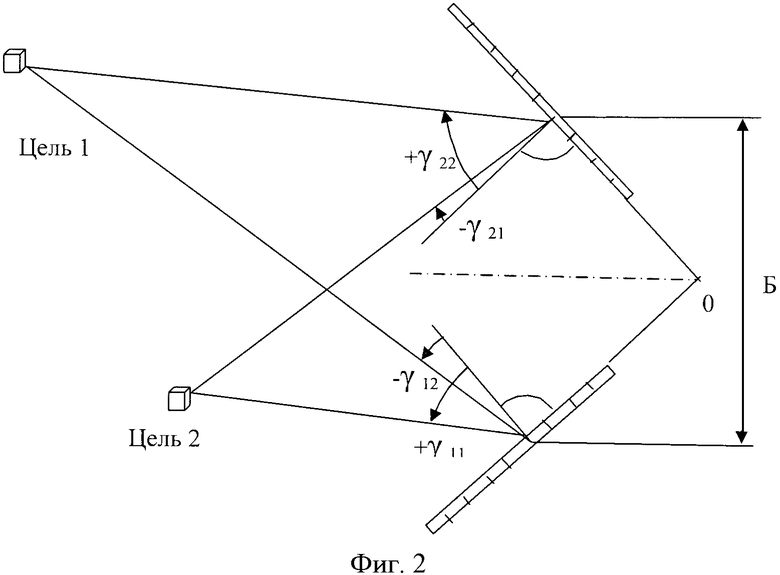
Для измерения дальности пассивным способом на основе стереоскопического базового метода при наблюдении местности и целей может быть использована линейка или мозаичный приемник на основе приборов с зарядовой связью (ПЗС), приемные площадки которых наклонены под углом 90° к линии наблюдения.
Такой наклон приемников вызывает новое качество - получение трехмерной матрицы ПЗС. На фиг.2 показан пассивный базовый метод измерения дальности двумя датчиками ПЗС для двухосной системы расположения приемников.
Дальнометрирование с использованием мозаики когерентных фотодетекторов ПЗС позволяет также использовать сформированные голограммы, восстанавливающие трехмерное изображение объектов, затем сравнивать с эталоном, что снижает влияние помех (средств маскировки противника).
В качестве фотоприемного устройства (ФПУ) может быть выбрана матрица (линейка) ПЗС.
Так как поле наблюдения ФПУ разбивается на пиксели, то из законов геометрической оптики и физических характеристиках пикселов следует, что каждый из них соответствует определенному квадрату пространства и наоборот. Дискретизации ФПУ в виде светочувствительных элементов ПЗС и проекция данных элементов на местность (пиксел) должны соответствовать на максимальной дальности наблюдения при минимальном элементе обнаружения (опознания).
Матрицы ПЗС состоят из большого количества светочувствительных элементов (сотни тысяч пикселов), преобразующих световое излучение в электрические сигналы. Последние с помощью специальных устройств записываются или могут сразу же передаваться в память ПЭВМ.
Положение каждого светочувствительного элемента в матрице строго определено. Все они имеют индивидуальные номера, состоящие из двух частей. Первая показывает принадлежность пиксела определенной горизонтальной линии, вторая - вертикальной. Следовательно, каждый кадр имеет своеобразную координатную сетку, не меняющуюся при переходе от кадра к кадру при условии жесткого закрепления прибора. Это обстоятельство позволяет точно определять координаты движущегося объекта при «перемещении» его от одного пиксела к другому.
Чем больше количество пикселов, тем выше качество изображения. Существует несколько форматов записи, отличающихся количеством пикселов в растре. Основными из них являются форматы VHS, S-VHS и Betacam. Первому соответствует 380000 пикселов, второму - 480000, третьему - 564480. Соотношение сторон кадра для первых двух 4:3, для третьего - 16:9.
Рассмотрим требования к величине измеряемого параллактического угла, исходя из требуемой дельности работы дальномера до 7000 м при базе Б=0,350 м (расстоянию между фотоприемниками). Результаты расчета, согласно зависимости (1) сведем в табл.1.
Определение дальности в зависимости от параллактического угла γ
Таким образом, для определения дальности малогабаритной аппаратурой от 20 м до 7000 м с базой между ПЗС-приемниками, равной 350 мм (учитывая условия ведения артиллерийской разведки, где дальность прямой видимости по картам в среднем составляет 6...7 км), необходимо обеспечить точность определения параллактического угла около 10 угловых секунд. Данное условие для современной техники легко выполнимо.
Общий подход к конструкции приборов. Исходя из высокой динамики боя, прибор должен:
- иметь малую массу, чтобы легко переноситься, то есть быть малогабаритным;
- быстро приводиться в боевое (рабочее) состояние, то есть не иметь массивных треног и др. средств установка.
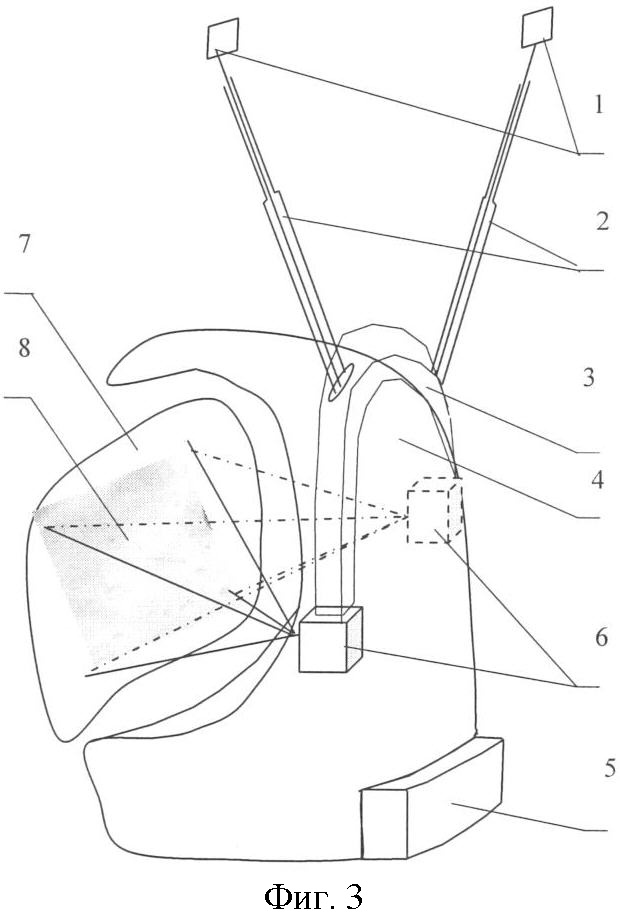
По взглядам специалистов, снаряжение солдата XXI века станет венцом военно-технической мысли. На фиг.3 приведен вариант снаряжения солдата.
Предлагается нашлемная разведывательная система пассивного дальнометрирования объектов.
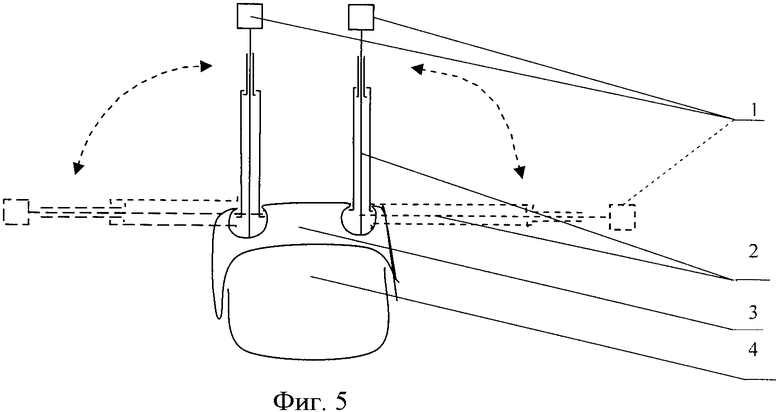
Задача изобретения достигается тем, что при наблюдении (разведке) целей (фиг. 2) используется система пассивного (скрытного) дальнометрирования объектов (фиг. 3, 4, 5), размещенная на защитном шлеме (каске) 4 наблюдателя, что позволяет сократить путь вывода разведывательной информации с прибора к зрительным органам наблюдателя.
Пассивное наблюдение и дальнометрирование объектов осуществляется на основе стереоскопического базового метода с использованием двух матриц приборов зарядовой связи (ПЗС), фотоприемные площадки 1 которых наклонены под углом 90° к линии наблюдения.
Нашлемная система дальнометрирования объектов снабжена раздвижными телескопическими направляющими, полупрозрачным экраном и двумя матрицами зарядовой связи для измерения дальности до объекта на основе стереоскопического базового метода, при этом фотоприемные площадки матриц наклонены под углом 90° к линии визирования «фотоприемник-объект», а полупрозрачный экран выполнен с возможностью проецирования на него обработанной информации о целях посредством их наложения на реальное изображение местности.
Фотоприемные площадки расположены на телескопических (раздвижных) направляющих 2 в нашлемном устройстве крепления 3. Перемещение фотоприемных устройств обеспечивает скрытое наблюдение и защиту наблюдателя от осколков (пуль) при вертикальном расположении из укрытия типа окоп, а при горизонтальном положении направляющих - из укрытия типа столб.
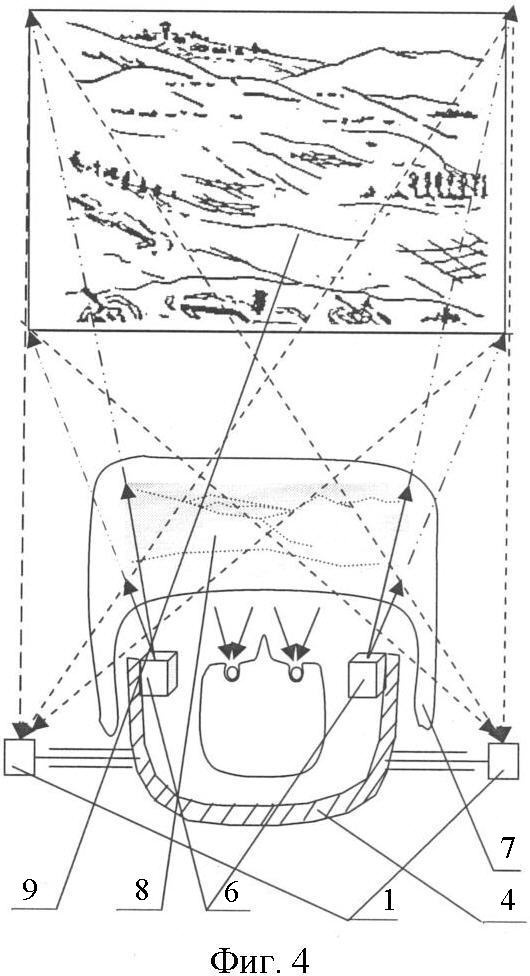
Информация о местности и целях в различных диапазонах анализируется в устройстве обработки 5, передается в устройства проектирования 6. Изображение местности и целей в различных диапазонах, а также вычисленная дальность до целей 8 проецируются на полупрозрачные (жидкокристаллические) очки (забрало) 7 и накладываются на реальное изображение местности 9, наблюдаемое органами зрения наблюдателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПАССИВНОГО ДАЛЬНОМЕТРИРОВАНИЯ ОБЪЕКТОВ В УПРАВЛЯЕМЫХ БОЕПРИПАСАХ | 2004 |
|
RU2295103C2 |
| ТРЁХКООРДИНАТНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ МОНОКУЛЯРНЫМИ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ НАЗЕМНЫХ И ВОЗДУШНЫХ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ НА ОСНОВЕ СТЕРЕОСКОПИЧЕСКОГО 3D-МОНИТОРИНГА | 2021 |
|
RU2789117C2 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2574224C1 |
| Способ получения стереоскопических снимков с синтезированной величиной стереобазы | 2019 |
|
RU2703611C1 |
| ПРИЦЕЛ НА ВНУТРЕННЕЙ БАЗЕ | 2016 |
|
RU2638625C2 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ СО ВСТРОЕННЫМ ПАССИВНЫМ ДАЛЬНОМЕРОМ | 2021 |
|
RU2785957C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТЕРЕОСКОПИЧЕСКИЙ ДАЛЬНОМЕР | 2014 |
|
RU2579532C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ВЫВЕРКИ НУЛЕВЫХ ЛИНИЙ ПРИЦЕЛИВАНИЯ ОПТИКО-ЭЛЕКТРОННЫХ КАНАЛОВ ПРИЦЕЛОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2018 |
|
RU2695141C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЕ КООРДИНАТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2523446C2 |
| Оптико-электронный пассивный дальномер | 2019 |
|
RU2721096C1 |
Изобретение относится к области оптико-электронных приборов, а именно к оптико-электронным малогабаритным наблюдательным и разведывательным системам, и может быть использовано в военной технике. Нашлемная система дальнометрирования объектов снабжена раздвижными телескопическими направляющими, полупрозрачным экраном и двумя матрицами зарядовой связи для измерения дальности до объекта. Фотоприемные площадки матриц наклонены под углом 90° к линии визирования «фотоприемник-объект», а полупрозрачный экран выполнен с возможностью проецирования на него обработанной информации о целях. Техническим результатом является уменьшение пути вывода разведывательной информации с прибора к зрительным органам наблюдателя. 5 ил., 1 табл.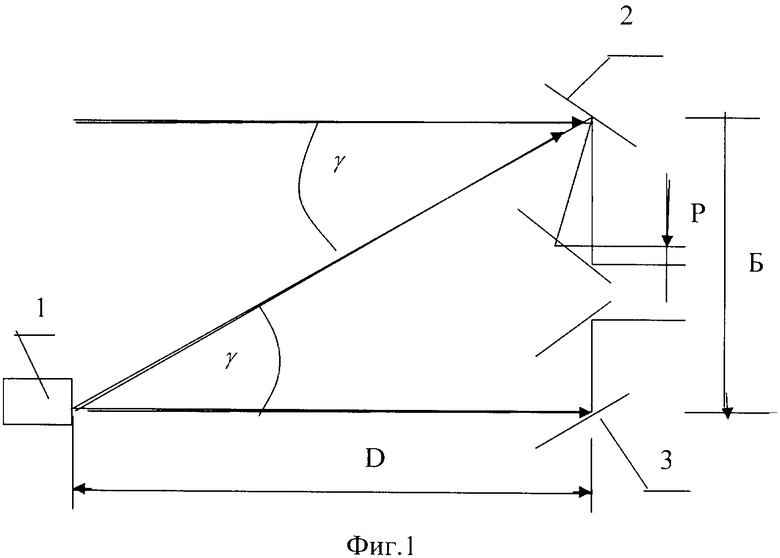
Нашлемная система дальнометрирования объектов, отличающаяся тем, что она снабжена раздвижными телескопическими направляющими, полупрозрачным экраном и двумя матрицами приборов зарядовой связи (ПЗС) для измерения дальности до объекта на основе стереоскопического базового метода, при этом фотоприемные площадки матриц ПЗС наклонены под углом 90° к линии визирования «фотоприемник-объект», а полупрозрачный экран выполнен с возможностью проецирования на него обработанной информации о целях посредством их наложения на реальное изображение местности.
| СПОСОБ ВЫСОКОТОЧНОГО ЦЕЛЕУКАЗАНИЯ | 1999 |
|
RU2165062C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ДЛЯ СТЕНДА МОДЕЛИРОВАНИЯ С ОБЗОРНО-ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ | 2001 |
|
RU2202829C2 |
| СПОСОБ ИЗМЕРЕНИЯ | 1995 |
|
RU2117250C1 |
| DE 4415420 A, 09.11.1995. | |||

