Изобретение относится к измерительной технике и может быть использовано для одновременного определения скорости движущихся объектов, расстояний до них и угловых координат, измерения расстояния до объектов, находящихся в зоне обзора.
Известен «Способ определения дальности и/или скорости удаленного объекта» (Патент RU 2385471, МПК G01S 17/50, G01C 3/08, опубликован 27.03.2010), включающий многократное зондирование объекта путем посылки на него серии n лазерных импульсов и определения в каждом i-м зондировании временного интервала ti и между моментами излучения лазерного импульса и приема отраженного объектом излучения, при каждом зондировании определяют и регистрируют значения моментов текущего времени Тi, в которые производят посылки лазерных импульсов, регистрируют значения измеренных интервалов ti в серии n зондирований, после завершения серии для каждого зондирования определяют отсчеты дальности Ri=c·ti/2, где с - скорость света, интерполируют полученные выборочные значения Ri линейной зависимостью вида R∗(T)=R∗0+V∗T, где R∗0 - оценка дальности в начальный момент периода измерения, V∗ - оценка средней скорости объекта за время измерения, Т - текущее время, устанавливают величину ΔR допустимого отклонения измеренных значений от интерполирующей функции, причем ΔR=qσ R, где q - коэффициент, определяемый заданной вероятностью безошибочного измерения, σ R - среднеквадратическая ошибка измерения дальности в каждом из замеров, после чего определяют модули ΔRi=/Ri(Ti)-Ri∗(Ti)/ отклонения замеров Ri(Ti) от соответствующих интерполированных значений Ri∗(Тi), аннулируют замеры, в которых ΔRi>ΔR, и повторно интерполируют оставшиеся выборочные значения дальности зависимостью вида R∗∗(T)=R∗∗0+V∗∗T, по которой судят об уточненных значениях дальности R∗∗0 и скорости V∗∗ объекта.
Недостатком данного способа является то, что лазерный луч имеет расходимость, и на больших расстояниях возможно попадание в лазерный луч нескольких предметов, находящихся на разных расстояния или движущихся с разными скоростями, это существенно повысит время достоверного измерения расстоянии и/или скорости наблюдаемого объекта.
Известно устройство «Трехмерная камера и дальномер» (Патент US №005081530, МПК H04N 13/02, опубликован 14.01.1992). Принцип работы этого устройства заключается в излучении световых импульсов в сторону зоны обзора, накоплении заряда отраженного сигнала на матрице приборов с зарядовой связью (ПЗС), при этом два следующих друг за другом импульсов света имеют разную длительность. Количество энергии, накопленной на ПЗС, различно для каждого из импульсов. По разнице заряда, накопленного при приеме двух отраженных импульсов света, оценивают дальность до объекта, от которого отразился импульс света с углового направления соответствующего данному ПЗС, находящемуся в матрице ПЗС.
Недостатком данного устройства является необходимость производить два акта излучения и засвечивания матрицы, что существенно увеличивает время измерения расстояния. Также матрицы ПЗС имеют считывающие регистры, скорость которых конечна, следовательно, время считывания накопленного заряда довольно велико, и чем больше матрица содержит элементов ПЗС, тем более длительным будет процесс съема уровней зарядов. Точность и разрешающая способность определения расстояния данным устройством напрямую зависит от чувствительности матрицы ПЗС, производимыми ею шумами и шумами, производимыми выходным каскадом устройства, отражательной способности объектов, от которых отражаются импульсы света, мощности источника импульсов света. ПЗС имеют ограниченный объем хранимых сгенерированных электронов, которые были получены при выбивании их фотонами, поэтому динамический диапазон данного устройства будет зависеть как от отражательной способности объектов, от которых отражаются импульсы света, так и от мощности источника. Таким образом, повышение точности измерений такого устройства связано с уменьшением его динамического диапазона, и наоборот. Наличие внешнего освещения значительно дискредитирует динамический диапазон данных устройств, т.к. создает в ПЗС электроны, которые не несут полезного сигнала всего лишь увеличивающих общий уровень энергии на всех элементах матрицы ПЗС одинаково. Таким образом, существенно ограничивается дальность обнаружения объектов данным устройством.
Известен способ-прототип «Способ и система обнаружения и измерения расстояния» (Патент US №008310655, МПК G01C 3/08, опубликован 13.11.2012), заключающийся в излучении импульсов света в направлении поля обзора, детектировании отраженного импульса света, оцифровывании принятого сигнала, расчете дальности посредством измерения временного интервала между моментами излучения и приемом отраженного импульса света, расчете скорости движущихся объектов посредством сравнения изменения дальности до объекта в течение определенного времени и определении угловых координат.
Недостатком известного способа-прототипа является непосредственное оцифровывание сигнала от принятого отраженного импульса света, рассчитывание скорости движущихся объектов способом вычисления разницы во временных интервалах между излученным и принятым импульсами света от движущихся объектов, вследствие того, что при непосредственном оцифровывании сигнала этот сигнал включает в себя постоянную составляющую окружающего зону обзора света, на фоне которой сложно выделить полезный сигнал, также непосредственное оцифровывание принятого сигнала значительно уменьшает динамический диапазон системы.
Причиной, препятствующей получению указанного ниже технического результата при использовании известного способа-протопипа, является непосредственное оцифровывание принятого сигнала, который имеет постоянную составляющую окружающего зону обзора света. Определение скорости движущегося объекта по измерению разницы во временных интервалах между излученным и принятым импульсами света от движущихся объектов снижает точность измерения, т.к. при небольших перемещениях движущихся объектов изменение расстояние до них будет происходить медленно. Точность измерения скорости напрямую зависит от точности измерения расстояния.
Известно устройство «Датчик изображения расстояний и способ для получения сигнала изображения времяпролетным способом» (Патент ЕР 2322953, МПК G01S 17/10, G01S 17/89, H01L 27/146, H04N 5/225, H04N 5/335, опубликован 18.05.2011), содержащее матрицу фоточувствительных элементов с установленным перед ней объективом, источник света с установленной перед ним линзой, блок получения изображения, блок управления.
Недостатком известного устройства является низкая чувствительность фоточувствительных элементов вследствие их малой площади, низкий динамический диапазон фоточувствительных элементов вследствие необходимости накопления и хранения сгенерированного заряда, созданного в процессе внутреннего фотоэффекта до момента считывания заряда в силу того, что емкость фоточувствительного элемента ограничена. Также недостатком является непосредственное оцифровывание заряда, накопленного на фоточувствительном элементе, что уменьшает отношение сигнал-шум устройства и ограничивает области его применения. Время считывания накопленного заряда зависит от количества фоточувствительных элементов, чем их больше, тем более длительным будет процесс съема уровней зарядов. Точность и разрешающая способность определения расстояния данным устройством напрямую зависит от чувствительности матрицы фоточувствительных элементов, производимыми ею шумами, и шумами, производимыми выходным каскадом устройства, отражательной способности объектов, от которых отражаются импульсы света, мощности источника импульсов света. Повышение точности такого устройства связано с уменьшением его динамического диапазона, и наоборот. Наличие внешнего освещения значительно дискредитирует динамический диапазон данного устройства, т.к. создает в фоточувствительных элементах электроны, которые не несут полезного сигнала, всего лишь увеличивающих общий уровень энергии на всех элементах матрицы фоточувствительных элементов одинаково. Таким образом, существенно ограничивается область применения данного устройства.
Известно устройство «Времяпролетная камера» (Патент US 2011/0304696, МПК H04N 13/02, опубликован 15.12.2011), содержащее источник света с установленной перед ним линзой, матрицу фоточувствительных элементов, соединенную с блоком управления.
Недостатком известного устройства является необходимость накопления заряда, образовывающегося в результате внутреннего фотоэффекта, также недостатком является регистровый способ считывания сгенерированного заряда вследствие того, что матрица фоточувствительных элементов представляет собой прибор с зарядовой связью с регистровым способом считывания заряда. Т.к. в известном устройстве оцифровывается уже накопленный на момент считывания заряд, то это приводит к уменьшению отношения сигнал-шум и уменьшает динамический диапазон, что в свою очередь сужает область применения устройства и делает практически невозможным работу устройства при сильном освещении зоны обзора, например в солнечную погоду, снижается дальность обнаружения объектов.
Известно устройство-прототип «Светодиодное устройство обнаружения объектов и способ сочетающий трассификацию полного отражения от индивидуальных каналов с узким полем обзора» (Патент US 008242476, МПК G01N 21/86, G06M 7/00, опубликован 14.08.2012), содержащее светодиодный источник света с установленной перед ним линзой, матрицу фоточувствительных элементов с установленной перед ней объективом. Выход каждого фоточувствительного элемента матрицы фоточувствительных элементов соединен с входом блока оцифровывания сигнала. Выход блока оцифровывания сигнала соединен с входом блока обнаружения объектов и измерения расстояний до объектов. Выход блока обнаружения объектов и измерения расстояний до объектов соединен с блоком управления, выходы которого соединены с генератором импульсов, выход которого соединен со светодиодным источником света и блоком оцифровывания, и имеет выход к внешним устройством.
Недостатком известного устройства-прототипа является то, что на фоточувствительные элементы кроме света с рабочей длиной волны попадает свет с длинами волн, отличными от рабочей длины волны, присутствующий в зоне обзора. Также недостатком является непосредственное оцифровывание сигнала, принятого фоточувствительными элементами без предварительного дифференцирования аналогового сигнала.
Причиной, препятствующей получению указанного ниже технического результата при использовании известного устройства-прототипа, является низкое отношение сигнал-шум.
Это обусловлено тем, что свет, окружающий зону обзора и не несущий полезного сигнала, поступает на фоточувствительные элементы и детектируется ими. Фотоны этого света рождают электронно-дырочные пары, а сигнал, который получается в результате этого процесса, является шумовым, тем самым повышается общий уровень шума. Повышение общего уровня сигнала в силу повышения уровня шумов значительно дискредитирует отношение сигнал-шум устройства-прототипа. Беря во внимание тот факт, что сигнал с низким отношением сигнал-шум с каждого фоточувствительного элемента непосредственно оцифровывается, рассматриваемое устройство-прототип имеет ограниченную дальность обнаружения, более того, дальность обнаружения будет сильно зависеть от условий, в которых работает устройство, так, например, свет от солнца будет сильно уменьшать дальность обнаружения. Каждый их этих недостатков - попадание света с любой длиной волны и непосредственное оцифровывание сигнала сокращают дальность обнаружения объектов.
Основной задачей, на решение которой направлены заявляемый способ обнаружения объектов, измерения скорости, дальности и угловых координат и устройство для его осуществления, является одновременное обнаружение объектов, измерение скорости, дальности и угловых координат между нормалью к поверхности детектора отраженного импульса света и направлениями на объекты.
Техническим результатом, достигаемым при осуществлении заявляемого изобретения, является одновременность и точность обнаружения, измерения расстояния до объектов, скорости движения объектов и угловых координат.
Технический результат достигается тем, что в способе обнаружения объектов, измерения скорости, дальности и угловых координат, заключающемся в излучении импульсов света в направлении зоны обзора, детектировании отраженных импульсов света, оцифровывании принятых сигналов, расчете дальностей до объектов в зоне обзора, расчете скоростей движущихся объектов и определении угловых координат между нормалью к поверхности детектора отраженных импульсов света и направлениями на объекты, и передаче результатов измерения к внешним устройствам контроля, оцифровывая принятые сигналы, их дифференцируют, одновременно измеряют временные интервалы между моментами излучения и частями дифференцированных сигналов, соответствующих фронтам принятых отраженных импульсов света, и временные интервалы между частями дифференцированных сигналов, соответствующих фронтам принятых отраженных импульсов света, и частями дифференцированных сигналов, соответствующих спадам принятых отраженных импульсов света, рассчитывают скорости движущихся объектов по формуле 
где υ - скорость объекта, с - скорость света в среде, t1 - длительность излученного импульса света, t2 - временной интервал между частью дифференцированного сигнала, соответствующей фронту принятого отраженного импульса света, и частью дифференцированного сигнала, соответствующей спаду принятого отраженного импульса света.
Указанный технический результат достигается тем, что в устройстве, содержащем блок управления с выходом к внешним устройствам, блок оцифровывания сигнала, источник импульсов света с установленной перед ним линзой, матрицу фоточувствительных элементов с установленной перед ней объективом, причем выход блока управления соединен с источником импульса света, перед линзой и объективом установлен оптический фильтр, а блок оцифровывания выполнен из многоканального измерителя временных интервалов и n дифференциаторов, входы которых соединены с выходами фоточувствительных элементов, а выходы - с входами сигналов многоканального измерителя временных интервалов, выход которого соединен с входом блока управления, первый выход которого соединен с сигнальным входом многоканального измерителя временных интервалов, а второй выход - с его первым входом.
Технический результат достигается за счет постоянства скорости света в среде и измерения времени его пролета до объекта и обратно. Перед линзой и объективом установлен оптический фильтр, который пропускает только рабочую длину волны, что позволяет увеличивать динамический диапазон устройства, это приводит к увеличению дальности обнаружения объектов. Выполнение блока оцифровывания в виде последовательно соединенных n дифференциаторов и многоканального измерителя временных интервалов позволяет увеличивать динамический диапазон устройства и увеличивать дальность обнаружения объектов, и одновременно измерять дальность и скорость движущихся объектов. Сравнение временного интервала между частью дифференцированного сигнала, соответствующей фронту принятого сигнала, и частью дифференцированного сигнала, соответствующей спаду принятого сигнала, с длительностью излученного импульса света позволяет рассчитать скорость движущихся объектов, при этом при увеличении длительности излучаемого импульса света увеличивается точность измерения скорости.
Проводить измерение скоростей движения объектов путем сравнения длительности излученного импульса света и длительности отраженного от движущегося объекта импульса позволяет эффект Доплера как для несущей частоты излучения, так и для частоты модуляции сигнала, при этом, вследствие изменения несущей частоты при отражении от движущегося объекта, будет изменяться длительность отраженного импульса света. Величина изменения длительности отраженного импульса света определяется скоростью движения объекта, от которого произошло отражение.
Проведенный заявителем анализ уровня техники показал, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного объекта способа обнаружения объектов, измерения скорости, дальности и угловых координат, отсутствуют, и устройство для его осуществления, следовательно, изобретение соответствует условию «новизна».
Результаты поиска известных технических решений в данной и смежных областях техники с целью нахождения признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения на достижение указанного технического результата и изобретение основано на:
- дополнении известного способа-прототипа какой-либо известной частью, присоединяемой к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создании устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат, и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует «изобретательскому уровню».
Способ обнаружения объектов, измерения скорости, дальности и угловых координат состоит в излучении в направление зоны обзора импульса света, например, с помощью инфракрасных светодиодов и детектировании отраженных импульсов света, например, с помощью фоточувствительных элементов. При излучении одного импульса света от объектов в зоне обзора, находящихся на разных угловых координатах и разных расстояниях, отражаются множество импульсов света, которые фокусируются и детектируются фоточувствительными элементами. Положение фоточувствительного элемента, на который поступает отраженный импульс света, определяет угловые координаты объекта в зоне обзора, от которого поступил сигнал, соответствующий детектированному импульсу света. Импульс света, в силу Эффекта Доплера [1], при отражении от движущегося объекта изменяет свою длительность - увеличивается, если объект удаляется, и уменьшается, если объект приближается, при этом изменяются несущая частота и частота модуляции сигнала. Изменение несущей частоты при отражении от движущегося объекта приводит к изменению длительности отраженного импульса света. Сигналы от отраженных импульсов света, детектированные на фоточувствительных элементах, оцифровывают:
- дифференцируют;
- одновременно измеряют временные интервалы между моментами излучения импульса света и частями дифференцированных сигналов, соответствующих фронтам принятых отраженных импульсов света, и временные интервалы между частями дифференцированных сигналов, соответствующих фронтам принятых отраженных импульсов света и частями дифференцированных сигналов, соответствующих спадам отраженных импульсов света.
На основе данных об измеренных временных интервалах для сигналов с каждого фоточувствительного элемента одновременно рассчитывают дальность до объекта, находящегося на угловом направлении, соответствующем данному фоточувствительному элементу, по формуле 
Информация о расстоянии и скорости движения объектов для каждого фоточувствительного элемента с известными угловыми координатами поступает к внешним устройствам контроля, где осуществляют дальнейшую обработку результатов измерения (вписывание информации о скорости движения транспортного средства в фотографию дороги с этим транспортным средством).
Для осуществления вышеописанного способа предлагается устройство, представленное на фиг.1.
Предлагаемое устройство состоит из блока управления 1, блока оцифровывания 2, содержащего многоканальный измеритель временных интервалов 2.1 и дифференциатор 2.2, источник импульсов света 3, матрицу фоточувствительных элементов 4, объектива 5, линзы 6, оптического фильтра 7, фоточувствительного элемента 8.
Первый выход блока управления соединен с источником импульсов света 3 и с входом многоканального измерителя временных интервалов 2.1, второй выход - с первым входом многоканального измерителя временных интервалов 2.1. Первый вход многоканального измерителя временных интервалов 2.1 является входом управления, а остальные - входами сигналов. Выход многоканального измерителя временных интервалов 2.1 соединен с входом блока управления 1. Входы дифференциаторов 2.2 соединены с выходами фоточувствительных элементов 8 матрицы фоточувствительных элементов 4. Перед матрицей фоточувствительных элементов 4 установлен объектив 5. Перед источником импульсов света 3 установлена линза 6. Матрица фоточувствительных элементов 4 выполнена из набора фоточувствительных элементов 8. Перед объективом 5 и линзой 6 установлен оптический фильтр 7.
Блок управления 1 выполнен в виде программируемой логической интегральной схемы, например Altera Cyclone [2].
Блок оцифровывания 2 состоит из n дифференциаторов 2.2, выходы которых соединены с входами многоканального измерителя временных интервалов 2.1.
Многоканальный измеритель временных интервалов 2.1 выполнен на базе микросхем Microchip CTMU [3].
Дифференциаторы 2.2 выполнены на базе операционных усилителей фирмы Analog Devices [4].
Источник импульсов света 3 состоит из инфракрасных светодиодов, например OSRAM Ostar IR SFH-4750 (4751) [5], и источника питания.
Матрица фоточувствительных элементов 4 представляет собой набор pin или лавинных фотодиодов, например матрица, состоящая из фотодетекторов для детектирования излучения с максимальной чувствительностью в районе 960 нм ФД-01-01 [6].
Объектив 5 представляет собой фотографический объектив.
Линза 6 представляет собой линзу для светодиодов LEDIL CN12299_IRIS-IR [7].
Оптический фильтр 7 представляет собой пластину из материала, пропускающего только инфракрасный свет, например Стекло Органическое Красное, или Стекло Органическое Пурпурное, или Стекло органическое темное производства НИИ Полимеров г.Дзержинск [8].
Электропитание всех блоков, входящих в состав устройства, осуществляется стандартными источниками питания.
Устройство работает следующим образом: блок управления 1 подает на источник импульсов света 3 прямоугольные импульсы с частотой ƒ и длительностью t. Источник импульсов света 3 излучает световые импульсы в сторону зоны обзора. Линза 6 задает необходимый угол излучения света. Импульс света, отразившись от объектов в зоне обзора 9, поступает через оптический фильтр 7, который пропускает только оптическое излучение с рабочей длиной волны и через объектив 5 на матрицу фоточувствительных элементов 4.
Импульс света при отражении от движущегося объекта 9 изменяет свою длительность - увеличивается, если объект удаляется, и уменьшается, если объект приближается, это связано с тем, что Эффект Доплера одинаково справедлив как для несущей частоты излучения, так и для частоты модуляции сигнала. Вследствие изменения несущей частоты при отражении от движущегося объекта изменяется длительность отраженного импульса света. Величина изменения длительности отраженного импульса света определяется скоростью движения объекта, от которого произошло отражение.
Объектив 5 фокусирует свет, отраженный от объектов 9, находящихся на разных угловых координатах от нормали к матрице фоточувствительных элементов 4, на соответствующие именно этим угловым координатам фоточувствительные элементы 8. Электрические сигналы, соответствующие отраженным импульсам света с фоточувствительных элементов 8 матрицы фоточувствительных элементов 4, поступают на вход блока оцифровывания 2, а именно на дифференциаторы 2.2, где из сигналов с постоянной составляющей выделяются фронты и спады этих сигналов, на выходе дифференциаторов 2.2 получают сигналы, соответствующие только фронту и спаду входных сигналов. Сигнал из дифференциаторов 2.2 поступает в многоканальный измеритель временных интервалов 2.1, где одновременно измеряют временные интервалы между
- началом излучения сигнала и моментом поступления сигналов, соответствующих фронтам принятых отраженных импульсов света, на входе многоканального измерителя временных интервалов 2.1;
- частями дифференцированных сигналов, соответствующих фронтам принятого отраженных импульсов света и частями дифференцированных сигналов, соответствующих спадам отраженных импульсов света.
Информация об этих временных интервалах поступает в блок управления 1, где на основании этих данных рассчитывают:
дальность до объекта, находящегося на соответствующей рассматриваемому фоточувствительному элементу 8 угловой координате, по формуле 
- скорость движения объекта, находящегося на соответствующей рассматриваемому фоточувствительному элементу 8 угловой координате, по формуле
По знаку скорости определяют направление движения объекта - приближение или удаление. Информация о расстоянии, скорости, угловых координатах и направлении движения объекта через выход к внешним устройствам блока управления 1 поступает на внешние устройства, где осуществляют дальнейшую обработку результатов измерения.
Как следует из вышеизложенного, достижение технического результата - одновременного обнаружения объектов, измерения направления движения, расстояния до объектов и скорости движущихся объектов - обеспечивается постоянством скорости света в среде, тем, что время пролета импульса света и саму длительность импульса света измеряют с помощью источника импульса света и фоточувствительного элемента, а также тем, что из сигнала с постоянной составляющей выделяют фронт и спад полезного сигнала с помощью дифференцирования сигнала.
Сопоставление параметров, характеризующих заявляемые изобретения, их прототипы, позволяет сделать вывод, что в предлагаемом изобретении увеличивается точность измерения расстояния и скорости движущихся объектов, увеличивается дальность обнаружения объектов, обеспечивается одновременность обнаружения объектов, измерения расстояния, направления и скорости движущихся объектов.
Предлагаемое устройство возможно использовать также для обнаружения объектов, измерения расстояния, угловых координат как в воздушной среде, так и в других средах, где возможно распространение оптических излучений, например жидкости или вакууме.
Предлагаемое устройство помимо достижения вышеуказанного технического результата позволяет
- обнаружить и измерять скорости движения транспортных средств,
- обнаруживать транспортные средства в слепых зонах автомобиля.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в измерительной технике и может быть использовано для одновременного определения скорости движущихся объектов и расстояний до них, измерения расстояния до объектов, находящихся в зоне обзора;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимых пунктах формул, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности «промышленная применимость».
Источники информации
1. Сайт справочной системы Wikipedia http://www.ru.wikipedia.org.
2. Сайт фирмы Altera http://www.altera.com/.
3. Сайт фирмы Microchip http://www.microchip.com/.
3. Сайт фирмы Microchip http://www.microchip.com/.
4. Сайт фирмы Analog Devices http://www.analog.com/.
5. Сайт фирмы Osram http://osram-os.com.
6. Сайт фирмы НПП «БИТ» http://detector.org.ua.
7. Сайт фирмы Ledil http://www.ledil.com/node/2/p/4233.
8. Сайт фирмы НИИ «Полимеров» http://www.nicp.ru/ru/52/55/116/.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТОВ, ИХ УГЛОВЫХ КООРДИНАТ И ВЗАИМНОГО РАСПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575318C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2580908C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| СПОСОБ РЕГИСТРАЦИИ СТАТИСТИЧЕСКОГО РАСПРЕДЕЛЕНИЯ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ОТ НИЗКОЛЕТЯЩЕЙ РАКЕТЫ БЛИКАМИ МОРСКОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2451301C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2006 |
|
RU2335785C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
Способ включает детектирование отраженных импульсов света, оцифровывание принятых сигналов, расчет дальностей до объектов и скоростей движущихся объектов, определение угловых координат. При оцифровывании сигналы дифференцируют. Одновременно измеряют временные интервалы между моментами излучения и частями дифференцированных сигналов, соответствующих фронтам принятых импульсов света, и временные интервалы t2 между частями дифференцированных сигналов, соответствующих фронтам и спадам принятых импульсов света. Рассчитывают скорости υ движущихся объектов: 
где с - скорость света в среде; t1 - длительность излученного импульса света. Устройство содержит блок оцифровывания сигнала, выполненный из многоканального измерителя временных интервалов и n-дифференциаторов, входы которых соединены с выходами фоточувствительных элементов, а выходы - с входами сигналов многоканального измерителя временных интервалов, выход которого соединен с входом блока управления. Технический результат - одновременность и точность обнаружения объектов, измерения скорости движения объектов, расстояний и угловых координат. 2 н.п. ф-лы, 1 ил.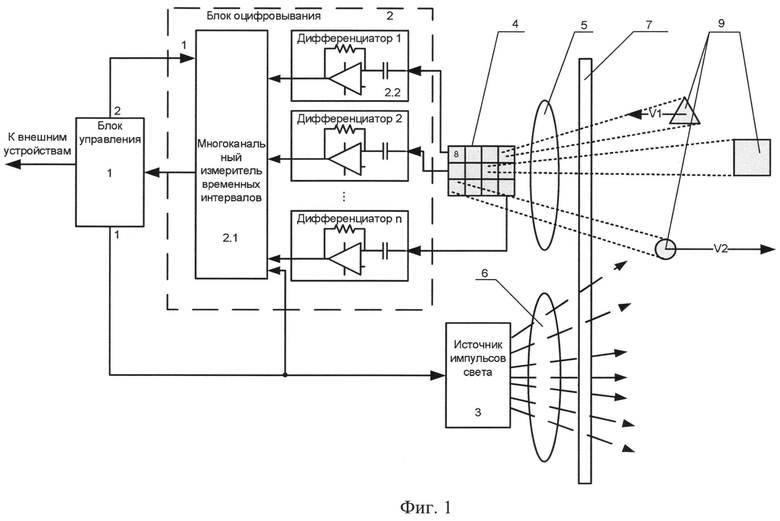
1. Способ обнаружения объектов, измерения скорости, дальности и угловых координат, заключающийся в излучении импульсов света в направлении зоны обзора, детектировании отраженных импульсов света, оцифровывании принятых сигналов, расчете дальностей до объектов в зоне обзора, расчете скоростей движущихся объектов и определении угловых координат между нормалью к поверхности детектора отраженных импульсов света и направлениями на объекты, и передаче результатов измерения к внешним устройствам контроля, отличающийся тем, что оцифровывая принятые сигналы, их дифференцируют, одновременно измеряют временные интервалы между моментами излучения и частями дифференцированных сигналов, соответствующих фронтам принятых отраженных импульсов света, и временные интервалы между частями дифференцированных сигналов, соответствующих фронтам принятых отраженных импульсов света и частями дифференцированных сигналов, соответствующих спадам принятых отраженных импульсов света, рассчитывают скорости движущихся объектов по формуле:
где υ - скорость объекта;
с - скорость света в среде;
t1 - длительность излученного импульса света;
t2 - временной интервал между частью дифференцированного сигнала, соответствующей фронту принятого отраженного импульса света, и частью дифференцированного сигнала, соответствующей спаду принятого отраженного импульса света.
2. Устройство обнаружения объектов, измерения скорости, дальности и угловых координат, содержащее блок управления с выходом к внешним устройствам, блок оцифровывания сигнала, источник импульсов света с установленной перед ним линзой, матрицу фоточувствительных элементов с установленным перед ней объективом, причем выход блока управления соединен с источником импульса света, отличающееся тем, что перед линзой и объективом установлен оптический фильтр, а блок оцифровывания выполнен из многоканального измерителя временных интервалов и n дифференциаторов, входы которых соединены с выходами фоточувствительных элементов, а выходы - с входами сигналов многоканального измерителя временных интервалов, выход которого соединен с входом блока управления, первый выход которого соединен с сигнальным входом многоканального измерителя временных интервалов, а второй выход - с его первым входом.
| US 2010277713 A1, 04.11.2010 | |||
| US 2011205521 A1, 25.08.2011 | |||
| ОПТИЧЕСКИЙ ДАЛЬНОМЕР | 1999 |
|
RU2155322C1 |
| US 2005225478 A1, 13.10.2005 | |||
| US 2011301914 A1, 08.12.2011 | |||

