Аэродромный автоматизированный комплекс (ААК) относится к области авиации и может быть использован как средство контроля, видеонаблюдения, регистрации характеристик полета одного и нескольких летательных аппаратов (ЛА). Комплекс используют для автоматизации процессов управления воздушным движением (УВД), регистрации летательных аппаратов, группы целей при проведении авиационных выставок международных авиасалонов, сертификации авиационного оборудования и для мониторинга демонстрационных полетов летательных аппаратов.
Известна телевизионная система мониторинга посадки самолетов (см. патент РФ на полезную модель №82079 от 19.11.2008 г.), содержащая не менее двух телевизионных камер, расположенных рядом с посадочной полосой и формирующих видеоизображения заходящего на посадку самолета, системный видеоблок, к которому подключены телевизионные камеры, монитор и устройство видеозаписи, блок управления. В телевизионную систему мониторинга, в которой телевизионные системы образуют стереопару, введены вычислительные устройства и дополнительные мониторы, каждые по числу телевизионных камер, и сетевой коммутатор, объединяющий в локальную вычислительную сеть вычислительные устройства, системный видеоблок и устройства видеозаписи, при этом дополнительные мониторы подключены к выходам вычислительных устройств, первые входы-выходы которых подключены к системному видеоблоку, а вторые входы-выходы - к входам-выходам соответствующих блоков управления.
Кроме того, телевизионная система мониторинга содержит телевизионную камеру, соединенную с системным видеоблоком, и датчик дальности, подключенный к сетевому коммутатору.
Однако данная система не позволяет проводить мониторинг демонстрационных полетов на больших и малых расстояниях до ЛА, с различным уровнем атмосферных помех, полетов днем и ночью.
Известна квантово-оптическая система «Сажень-ТМ» разработки НИИ прецизионного приборостроения, в которой основные технические решения, положенные в основу конструкции, включают опорно-поворотное устройство (ОПУ), систему поведения на базе моментных двигателей, вычислительно-управляющий комплекс, систему единого времени (СЕВ), аппаратуру передачи данных, метеоаппаратуру, лазерный локатор, видеотеодолит.
Система предназначена для получения внешне-траекторных измерений ракетно-космической и авиационной техники методом измерения угловых координат при полигонных испытаниях. Система позволяет проводить слежение за космическими объектами до 23 тысяч километров с угловыми скоростями до 40 угл. с/с, со среднеквадратическими отклонениями (СКО) измерения угловых координат точечных целей 5 угл. с, максимальные угловые скорости сопровождения целей - 30 угл. град/с2, угловых ускорений 150 угл. град/с2.
Информационные каналы видеотеодолита - обзорный и информационные, формируют стандартный аналоговый черно-белый телевизионный сигнал; репортажный канал формирует цветной TV-сигнал в формате PAL. Репортажный канал с переменным полем зрения предназначен для регистрации фаз полета целей и организации репортажа в процессе испытаний.
Обзорный канал используется для обнаружения целей оператором в контуре автосопровождения объекта для его удержания в узком поле зрения.
Измерительный канал предназначен для измерения угловых координат в инструментальной системе координат.
Система «Сажень-ТМ» обеспечивает поиск и обнаружение объектов испытаний (ОИ) в дневных и ночных условиях, их автоматическое сопровождение с измерением угловых координат, дальности, оперативной обработки и отображения процесса измерений, выдачи полученных данных в каналы связи в реальном масштабе времени.
В состав системы входят:
- автомобильный носитель;
- измерительные каналы: телевизионный канал с узким полем зрения, цветной телевизионный канал с переменным полем зрения, инфракрасный телевизионный канал, канал лазерного дальномера;
- опорно-поворотное устройство;
- аппаратура управления, отработки и регистрации информации;
- аппаратура привязки к сигналам единого времени (СЕВ).
Однако данная система не позволяет проводить мониторинг демонстрационных полетов воздушных судов на международных авиакосмических салонах и выставках.
Известна многофункциональная оптико-локационная система (см. патент РФ на изобретение №2292566 от 15.09.2005 г.), которая включает в себя расположенные на оптической оси передающего канала оптически сопряженные лазерный передатчик, формирующий зондирующий пучок лазерного излучения, пилотный лазер, формирующий контрольный пучок лазерного излучения, выходной телескоп, горизонтальную платформу с расположенными на ней первым и вторым зеркалами, выполненную с возможностью вращения вокруг вертикальной оси, три коаксиальных вала вращения, также расположенные на оптической оси приемного канала, оптически сопряженное третье зеркало, обратная отражательная поверхность первого зеркала, зеркально-линзовый объектив приемного телескопа, уголковое зеркало, комбинированное фотоприемное устройство, при этом второе и третье зеркала выполнены с возможностью синхронного вращения вокруг горизонтальной оси, также устройство автоюстировки, включающее прямоугольную призму в центре первого зеркала, прямоугольные отражательные призмы в центрах второго и третьего зеркал, призму-ромб с диафрагмой, установленной на выходной грани призмы-ромба, а также блоки отработки сигналов, приводы, датчики текущего состояния, блоки управления основных оптико-механических узлов.
К недостаткам оптико-локационной системы можно отнести следующие. Хотя оптико-локационная система содержит лазерный локатор и теплопеленгатор (или РЛС), однако, она не обладает многофункциональностью, ориентирована на решение одной специальной задачи. В ней используются практически не связанные друг с другом конструктивно теплогенератор для получения данных по азимуту и углу места объекта и лазерный локатор для определения координаты дальности.
Данная система не позволяет проводить эффективный мониторинг демонстрационных полетов ЛА, проводить проверку и сертификацию аэродромного оборудования, систем посадки.
Известна оптико-локационная система IRATS (В.В. Протопопов, Н.Д. Устинов. Инфракрасные лазерные локационные системы, стр.84-92, М. 1987), принятая за прототип, предназначенная для слежения за низколетящими аэродинамическими объектами. Система включает в себя импульсный лазерный передатчик, оптическую систему наведения лазерного луча, фотоприемное устройство, телевизионную камеру с системой автоматического слежения за объектами, используемую в качестве средства целеуказания, системы управления и обработки данных. Телевизионная камера осуществляет поиск объектов при наведении ее оптической оси в заданную точку пространства главным зеркалом системы наведения, которое может вращаться вокруг азимутальной и угломестной осей, при этом телевизионная камера может вращаться вокруг своей оси, компенсируя вращение изображения объекта в процессе сопровождения по азимуту. Импульсный лазерный передатчик начинает активный режим локации при обнаружении объекта. Телескоп принимает отраженный от объекта лазерный импульс и фокусирует его на фотодетектор. Далее на выходе фотодетектора формируются импульсные электрические сигналы, поступающие в преобразователь сигналов, связанный с блоком обработки данных, на выходе которого выдаются данные по дальности до объекта. Слежение за объектом осуществляется телевизионной автоматической системой с помощью приводов главного зеркала системы наведения или оператором вручную.
Оптико-механический блок представляет собой единую конструкцию, несущую лазерный передатчик, оптическую систему и телевизионную камеру с перископом, сопрягающим ее с оптическим трактом. Такая схема обеспечивает требуемую жесткость и неизменность юстировки в процессе работы. Основание всего механизма размещается на раме, которая опирается на домкраты, опускаемые на грунт, чем обеспечивается необходимая стабильность пространственного положения оптической системы.
Однако совмещение телевизионного и лазерного каналов в локальной системе IRATS реализовано тяжеловесно, с необходимостью осуществления особых мер по обеспечению стабильности оптической оси системы, с отсутствием контроля за неизменностью юстировки системы в процессе работы. В результате снижается точность измерений, ограничиваются возможности использования ее в практической работе при проведении мониторинга демонстрационных полетов ЛА.
Технический результат, на достижение которого направлено изобретение, заключается в повышении эффективности визуального и измерительного контроля за движением ЛА по взлетно-посадочной полосе (ВПП) аэродрома, при взлете и посадке, обеспечение видеоинформации о выпуске шасси и механизмов и поверхностей управления, работе и состоянии двигателей, средств спасения при катапультировании, автоматический поиск и сопровождение ЛА относительно курса глиссады, определение параметров полета ЛА по глиссаде.
Кроме того, повышение безопасности определяется во время режимов посадки, взлета, рулежки, демонстрационных полетов, а также при отработке минимумов ЛА и летчика, совершенствования оборудования аэродрома и системы УВД.
Для достижения указанного технического результата в аэродромный автоматизированный комплекс мониторинга, управления и демонстрации полетов летательных аппаратов, содержащий системы сбора, обработки, представления и отображения информации, связанные линиями передачи информации с датчиками определения траекторных параметров полета летательных аппаратов (ЛА) в зонах аэродрома, а также его метеообстановки, систему единого времени (СЕВ), включающие импульсный лазерный дальномерный передатчик, оптическую систему наведения лазерного луча, телевизионную камеру с системой автоматического и ручного слежения за объектами, посадочную радиолокационную станцию, пульты управления, дополнительно в комплекс введена оптико-электронная инфракрасная (ИК) телевизионная система с широким и узким диапазонами поля зрения камер (ЭОТС) для поиска, слежения и отображения ЛА, расположенная рядом со взлетно-посадочной полосой. Система регистрации информации, системы сбора, обработки, представления и отображения информации расположены на командном пункте (КП) управления воздушным движением (УВД). В комплекс введены вычислительные устройства - ЭВМ, объединенные в локальную вычислительную сеть. При этом передатчики импульсной лазерной дальномерной системы, посадочной радиолокационной станции, выходы телевизионной системы через блоки согласования, вычислительные устройства ЭВМ связаны с системой сбора информации, выполненной в виде локальной вычислительной сети с системой управления полетами ЛА, взаимосвязанной с системой передачи данных на КП соответствующих пультов управления, с системой единого времени. При этом с системой управления полетами ЛА также взаимосвязаны система радиосвязи, система отображения информации УВД. Кроме того, система сбора информации соединена через систему согласования с датчиками метеообстановки. Информацию о состоянии атмосферы и видимости используют для формирования процессов, влияющих на качество угловых измерений наблюдаемого ЛА, что повышает точность измерений. Система регистрации информации взаимосвязана с системой согласования метеоданных через локальную вычислительную сеть, а система отображения информации подключена к терминалам системы отображения информации УВД и к большим зрительским экранам. Измерительная информация может отображаться на мониторах в реальном масштабе времени в виде цифр или графиков. Регистрация видео- и измерительной информации может проводиться в реальном масштабе времени и использоваться в качестве объективного контроля. При этом единая конструкция, включающая ПК, телевизионные камеры и лазерный дальномер, установлена на опорном поворотном устройстве (ОПУ). Более того, система поиска и слежения за ЛА выполнена на основе видеотеодолитов с зеркально-линзовыми объективами с возможностью вращения установки вокруг трех осей ОПУ и проведения точной юстировки в виде единой конструкции.
Внедрение в практику использования ЭОТС в режимах УВД ЛА в зонах аэродромов, авиасалонов и секторов размещения зрителей при проведении международных авиакосмических салонов (МАКС) позволяет:
- создавать автоматизированную внешнетраекторную базу высокой точности с выдачей измерительной и видеоинформации о ЛА в реальном масштабе времени;
- передавать, отображать и регистрировать графическую и видеоинформацию на КП УВД при полетах и передвижениях ЛА в зоне аэродрома в реальном масштабе времени;
- контролировать и анализировать видеоинформацию о прилегающих к периметру аэродрома территориях, территории авиасалона и секторов размещения зрителей при проведении МАКС и других мероприятий;
- проводить обучение пилотов и отработку взлетно-посадочных характеристик ЛА при посадке в нестандартных условиях, участвовать в международной сертификации ЛА;
- выполнять измерение параметров систем катапультирования в реальных условиях при одновременном измерении параметров самолета и катапультируемого объекта.
Перечень позиций на чертеже
Для пояснения сущности изобретения на чертеже приведена структурная схема аэродромного автоматизированного комплекса, где изображено: 1 - воздушное судно (ВС), летательный аппарат (ЛА); 2 -командный пункт (КП) управления УВД; 3 - посадочная радиолокационная станция (РЛС); 4 - опорно-поворотное устройство (ОПУ) измерения угловых координат; 5 - лазерный дальномер; 5, 6, 7, 8 - единая конструкция ИК, телевизионных камер и лазерного дальномера с ОПУ - 4; 6 - система измерений по узкому телевизионному каналу; 7 - система телевизионного обзора; 8 - канал телевизионных ИК-измерений; 9, 10, 11 - блоки согласования; 12 - система радиосвязи; 13, 14, 15 - вычислительные устройства - ЭВМ; 16 - пульт управления терминалами системы отображения информации УВД; 17 - система управления полетами ЛА; 18 - система сбора информации - локальная вычислительная сеть (ЛВС); 19 - система согласования метеоданных; 20 - система метеонаблюдений; 21 - система отображения информации УВД; 22 - система передачи данных на командный пункт (КП); 23 - система регистрации информации; 24 - система единого времени (СЕВ); 25 - большие зрительские экраны; 26 - взлетно-посадочная полоса (ВПП); 27 - электронно-оптическая система; 28 - телевизионный экран; 29 - экран измерительной информации; 30 - экран ИК-измерений.
Аэродромный автоматизированный комплекс (ААК) включает: системы сбора информации и обработки информации - локальную вычислительную сеть - 18, представления и отображения информации - 21, связанные линиями передачи с датчиками определения траекторных параметров полета ЛА 3, 5, 7, 8 в зонах аэродрома, а также систему метеонаблюдений - 20, терминалы системы отображения информации УВД с пультом управления - 16 на командном пункте, систему единого времени (СЕВ) - 24. Датчик угловых координат ВС - 1 РЛС - 3, система поиска и слежения за ЛА - 6, 7, 8 представляют собой оптико-электронные ИК телевизионные системы (ТС) с переменным полем зрения 7 для поиска, обнаружения и захвата ВС и автоматического сопровождения ВС и ТС, 6 - с узким полем зрения для автоматического сопровождения и измерения угловых координат ВС. Датчик дальности до ЛА - лазерно-дальномерная система 5 - передатчик. Указанные датчики параметров полета ЛА связаны через блоки сопряжения 9, 10, 11 с вычислительными устройствами - ЭВМ 13, 14, 15 и системой сбора информации 18 - локальной вычислительной сетью, связанной с системой управления - 17, соединенной с датчиками метеонаблюдений и метеообстановки - 20 и системой радиосвязи - 12, системой передачи данных - 22 на командный пункт и СЕВ - 24. Данная система выполнена на основе видеотеодолитов-телескопов с возможностью вращения установок вокруг 3-х осей поворота и проведения точной юстировки (опорно-поворотное устройство ОПУ - 4).
Устройство работает следующим образом
Для обеспечения автоматического или ручного поиска, обнаружения ВС в дневных и ночных условиях, автоматического сопровождения с измерением угловых координат, дальности, оперативной обработки, регистрации и отображения ВС, выдачи полученных данных по каналам связи в пункты управления УВД, в зоне аэродрома используются приборы для высокоточных угловых измерений.
Значительная часть высокоточных угловых измерений выполняется человеком-оператором, осуществляющим визуальное наведение на объект ЛА - 1, отсчитывание рабочей меры и фиксацию результатов измерений с учетом параметров и характеристик зрительного и тактильного анализаторов человека. Задача оператора заключается в устранении рассогласования между направлением на его геометрический центр ЛА - 1 и оптической осью визирного устройства телевизионной системы (ТС), электонно-оптической системой (ЭОТС). При этом изменяется пространственное положение визирного устройства - ТС, 6, 7, 8 - ЭОТС с помощью устройства взаимного ориентирования. Рабочей мерой в данном случае является лимб с делениями - высокоточные угломерные приборы (УП) с визуальным отсчетом рабочей меры - теодолиты совмещены с ТС.
Малые угловые рассогласования, не превышающие углового поля визирного устройства, устраняются с помощью компенсатора, изменяя положение оптического элемента компенсатора и таким образом смещая изображение цели в плоскости сетки, оператор смещает геометрический центр изображения с точкой сетки, фиксирующей положение оптической оси визирного устройства. Пространственное положение визирного устройства при этом способе наведения на объект измерения ЛА не изменяется.
Рабочая мера - шкала, шаг деления которой рассчитан в соответствии с типом компенсатора и передаточного механизма, выполняющего функции устройства взаимного ориентирования. Пространственное ориентирование УП выполнено с помощью зубчатых и рычажных механизмов.
При автоматизированном (полуавтоматическом) режиме наведение и сопровождение целей осуществляет оператор; устройство наведения включает механизм объектива, анализатор изображения и приемник излучения.
Сигнал, снимаемый с приемника излучения, через электронный тракт поступает на индикатор, по показаниям которого оператор судит о необходимости дополнительного воздействия через устройство взаимного ориентирования на пространственное положение устройства наведения.
Излучение от объекта принимается объективом, строящим изображение объекта в плоскости анализа. С помощью анализатора параметры оптического сигнала преобразуются к виду, удобному для выделения при дальнейшей отработке угловых координат измеряемого объекта ЛА - 1. Электрический сигнал, снимаемый с приемника излучения, после преобразования в электронном тракте подается на электропривод. Последний через передаточный механизм воздействует на компенсатор рассогласования. Компенсатор изменяет направление хода лучей таким образом, чтобы уменьшить значение углового рассогласования. Процесс компенсации продолжается до полного устранения рассогласования. Изменение положения компенсатора фиксируется датчиком, выходной сигнал которого служит мерой входного рассогласования.
В режиме автоматического отсчитывания рабочих мер в УП после наведения визирного устройства на объект ЛА оператор кодирует с пульта управления - 16 необходимые сведения об измеряемом объекте и после этого соответствующей командой разрешает отсчитывание рабочей меры. Отсчетное устройство выдает информацию о взаимном положении визирного устройства и рабочей меры. Указанная информация поступает на индикаторы 28-30, рассчитанные на визуальное восприятие операторами и на устройство регистрации информации - 23. Регистрация отсчетов измеряемого направления выполняется совместно с закодированной в устройстве управления - 17 информацией об измеряемом объекте. Зафиксированная регистрирующим устройством - 23 информация обрабатывается на ЭВМ - 13, 14, 15.
Данная измерительная система имеет режимы работы - поиск, слежение и измерение. В режиме поиска выполняется привидение объекта ЛА в угловое поле устройства наведения ЭОТС 7, 8 с определенной точностью, после этого система переходит в режим измерения и точно определяет направление на объект ЛА - 1. В момент фиксации указанного направления осуществляется отсчитывание рабочей меры и регистрация измерительной информации ЭОТС 7, 8 и передача ее на вход ЭВМ - 18.
Операция поиска объекта выполняется с помощью сканирующего режима электрооптической телевизионной ИК-системой.
Автоматизация процесса высокоточных угловых измерений существенно усложняет конструкции наблюдаемого объекта ЛА - 1, что связано с необходимостью обеспечения помехозащищенности, которая достигается за счет обеспечения спектральной временной и пространственной селекции. Схема наблюдаемого объекта помимо источника излучения включает передающую оптическую систему ЭОТС 6, 7 (конденсор, модулятор и объектив). Пространственное ориентирование передающей оптической системы выполняется как человеком-оператором, так и автоматически.
Угломерная система с передающей телевизионной трубкой, где изображение объекта с помощью объектива строится на чувствительной площадке телевизионной трубки ТС. Трубка снабжена системой электростатической и магнитной фокусировки. Сканирование электронного изображения обеспечивается генератором строчной и кадровой разверток, подключенными к системе отклонения луча и синхронизируемыми опорным генератором. Видеосигнал с выхода трубки поступает на видеоусилитель и далее - блок измерения координат. Работа в блоке синхронизирована с работой генераторов строчной и кадровой развертки. С выхода блока измерения координат выдаются сигналы, соответствующие линейному положению измеряемого объекта на чувствительной площадке трубки. При этом одна из координат определяется положением видеоимпульса в строке развертки, другая - порядковым номером строки. Цифровой преобразователь преобразует указанные временные интервалы в последовательность импульсов, которая фиксируется устройством регистрации - 23 и подается на ЭВМ - 18.
В процессе преобразования оптического и электрического изображений в телевизионной системе возникают различные искажения, связанные с нестабильностью и нелинейностью геометрических и электрических параметров трубки, неточностью юстировки. В связи с этим в состав телевизионной угломерной системы включается канал калибровки, состоящий из полупрозрачного зеркала, объектива, точной шкалы и источника света. По каналам блока управления система периодически контролируется, изображение шкалы строится объективом на чувствительной площадке трубки. Измеренные параметры шкалы направляются в запоминающее устройство, которое обеспечивает их сравнение с заданными, а в случае выявления отклонений корректирует режим работы телевизионной трубки. Высокая помехозащищенность обеспечивается тем, что при формировании сигнала рассогласования принимается незначительная часть энергии фона, окружающая объект измерения ЛА - 1.
Канал лазерного дальномера - 5 предназначен для измерения наклонной дальности до объекта испытаний как оборудованных световозвращающими отражателями, так и не оборудованных (Д=10-20 км). Среднеквадратическая погрешность измерений не более 0,5 м, частота измерений - 50 Гц, рабочая длина волны - 1,064 мкм.
ИК-канал - 8 предназначен для обеспечения, поиска, обнаружения, сопровождения и измерения угловых координат целей в ИК-диапазоне длин волн. Угол поля зрения - 1°, средне-квадратическое отклонение (СКО) измерения угловых координат ~10 утл. с, спектральный диапазон работы 3-5 мкм, частота съема информации 50-200 Гц.
Опорно-поворотное устройство ОПУ - 4 азимутально-угломерное устройство предназначено для наведения измерительных средств и измерения угловых координат. Диапазон углов поворота по азимуту ~ 270 угл. град, по углу места 5-15 угл. град, максимальная угловая скорость слежения 30 угл. град/с, угловое ускорение - 70 угл. град/с2.
РЛС - 3 - радиолокационная станция, служит для определения местоположения движущихся ВС в воздушном пространстве. В состав РЛС входит ОПУ - 4 для автоматического измерения угловых координат целей ЛА-1.
В системе метеонаблюдения - 20 формируются параметры о состоянии атмосферы и видимости на ВПП - 26. Так как средой распространения оптического сигнала является атмосфера, то важнейшими процессами, влияющими на качество угловых измерений в атмосфере, являются поглощение и рассеяние излучения, а также случайные и регулярные изменения оптических характеристик атмосферы. Поглощение и рассеяние снижают уровень сигнала, идущего от наблюдаемого объекта к приемной оптической системе и тем самым уменьшают отношение сигнал-шум, оказывающее заметное влияние на погрешность угловых измерений.
В устройстве высокоточных угловых измерений точность определяется влиянием турбулентности атмосферы и рефракцией оптических лучей. Флюктуации фазы световых волн в турбулентной атмосфере определяют случайные изменения углов прихода фронта этих волн на входной зрачок приборов 6, 7, 8. Размытие изображения характеризует дисперсия дрожания, определяемая дисперсией флюктуации координат центра тяжести изображения в однородном слое приземной атмосферы. Мерцание изображения сказывается в изменении амплитуды сигналов. Параметр дальности Д характеризует составляющие флюктуации амплитуды световой волны. Уменьшение фотометрической характеристики светового пучка изображения, освещенности в плоскости входного зрачка по закону квадрата расстояния Д учитывается в системах 6, 7, 8.
Рефракция определяется состоянием атмосферы на трассе измерений - ее стратификацией, температурой, наличием облачности и атмосферных фронтов, измеряемых системой метеонаблюдений 20, 19. Одним из основных факторов, определяющих рефракцию, является изменение вертикального градиента температуры, что особенно заметно с изменением высоты над подстилающей поверхностью.
В процессе эксплуатации с пульта управления электронно-оптической системы (ЭОТС) диспетчер КП-УВД устанавливает режим «посадка» ВС. Координаты ВС - 1, находящегося в зоне захода на посадку, поступают на ЭОТС 7 и 8 от посадочной РЛС - 3. ЭОТС осуществляет автоматический режим поиска, захвата для мониторинга и сопровождение ВС с момента захода на посадку, движение ВС по курсу, глиссаде, до момента касания ВПП, движения и остановки на ВПП. Полученная в реальном масштабе времени угловая информация, дальности и визуальная информация в телевизионном и ИК диапазонах, обрабатывается, регистрируется и передается на КП УВД - 2. Полученная информация отражается на экранах мониторов 28-30 и на больших экранах - 25 зрителей.
Режим «взлет» ВС также устанавливается диспетчером на пультах - 16 КП УВД - 2. ЭОТС 7, 8 автоматически осуществляет поиск ВС на ВПП - 26 и автоматически сопровождает ВС - 1 с момента трогания до момента потери его видимости. Полученная информация, как измерительная, так и видеоинформация, отображается на мониторах 28-30, 25 и регистрируется в системе 23.
В режиме «рулежка» ЭОС по командам оператора на КП УВД ЭОТС переходит в режим ручного управления. С помощью ручки управления ЭОК оператор находит движущиеся ВС по ВПП и переводит в режим автоматического сопровождения или может производить визуальный просмотр сооружений на территории аэродрома.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА КОНТРОЛЯ МИКРОВОЛНОВЫХ СИСТЕМ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2047186C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759057C1 |
| КОМБИНИРОВАННАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2014 |
|
RU2541494C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА ПЕРЕД ВЗЛЕТОМ | 2011 |
|
RU2463567C1 |
| СПОСОБ И СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНЫМ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ В ПРЕДЕЛАХ УСТАНОВЛЕННОЙ ЗОНЫ АЭРОДРОМА | 2012 |
|
RU2521450C2 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759058C1 |
Изобретение относятся к области авиационного приборостроения и может быть использовано как средство контроля автоматизации процессов управления: воздушным движением (УВД), регистрации воздушных судов (ВС), группы целей для повышения безопасности взлета-посадки, выполнения «круга» и пилотажа ВС в зоне аэродрома, при сертификации, проведении авиационных выставок, шоу и т.д. Технический результат - повышение безопасности полетов. Для достижения данного результата в комплекс введена оптико-электронная инфракрасная (ИК) телевизионная система с широким и узким диапазонами поля зрения камер для поиска, слежения и отображения летательного аппарата (ЛА), система регистрации информации, системы сбора, обработки, представления и отображения информации расположены на командном пункте УВД. Передатчики импульсной лазерной дальномерной системы, посадочной радиолокационной станции, выходы телевизионной системы через блоки согласования и вычислительные устройства ЭВМ связаны с системой сбора информации, выполненной в виде локальной вычислительной сети с системой управления полетами ЛА, взаимосвязанной с системой передачи данных на командный пункт соответствующих пультов управления, с системой единого времени. 1 з.п. ф-лы, 1 ил.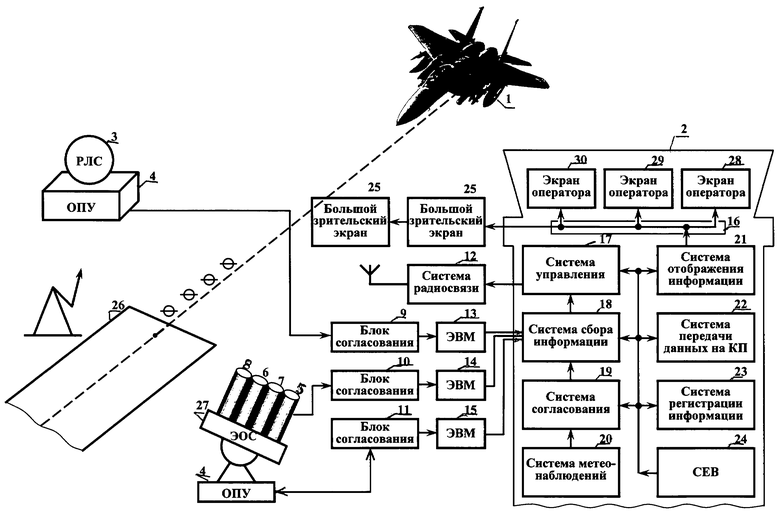
1. Аэродромный автоматизированный комплекс мониторинга, управления и демонстрации полетов летательных аппаратов, содержащий системы сбора, обработки, представления и отображения информации, связанные линиями передачи информации с датчиками определения траекторных параметров полета летательных аппаратов (ЛА) в зонах аэродрома, а также его метеообстановки, систему единого времени (СЕВ), включающий импульсный лазерный дальномерный передатчик, оптическую систему наведения лазерного луча, телевизионную камеру с системой автоматического и ручного слежения за объектами, посадочную радиолокационную станцию, пульты управления, отличающийся тем, что в комплекс введены оптико-электронная инфракрасная (ИК) телевизионная система с широким и узким диапазонами поля зрения камер для поиска, слежения и отображения ЛА, расположенная рядом со взлетно-посадочной полосой, в комплекс введены вычислительные устройства, объединенные в локальную вычислительную сеть, при этом передатчики импульсной лазерной дальномерной системы, посадочной радиолокационной станции, вход-выходы телевизионной системы через блоки согласования и вычислительные устройства ЭВМ связаны с входами системы сбора информации, выполненной в виде локальной вычислительной сети, выход которой подключен к системе управления полетами ЛА, а также взаимосвязанной с системой передачи данных на командный пункт соответствующих пультов управления, с системой единого времени, с системой регистрации информации, системой отображения информации управления воздушным движением (УВД), при этом система управления полетами ЛА также взаимосвязана с системой радиосвязи, системой отображения информации УВД, а система сбора информации соединена через систему согласования с датчиками метеообстановки, система регистрации информации взаимосвязана с системой согласования метеоданных через локальную вычислительную сеть, система отображения информации подключена к терминалам системы отображения информации УВД и к большим зрительским экранам, при этом единая конструкция ИК, телевизионных камер и лазерный дальномер установлены на опорном поворотном устройстве (ОПУ), а системы регистрации информации, сбора, обработки, представления и отображения информации расположены на командном пункте УВД.
2. Аэродромный автоматизированный комплекс мониторинга, управления и демонстрации полетов летательных аппаратов по п.1, отличающийся тем, что система поиска и слежения за ЛА выполнена на основе видеотеодолитов-телескопов с зеркально-линзовыми объективами с возможностью вращения установки вокруг трех осей ОПУ и проведения точной юстировки в виде единой конструкции.
| ПРОТОПОПОВ В.В., УСТИНОВ Н.Д | |||
| Инфракрасные лазерные локационные системы | |||
| М.: Машиностроение, 1987, стр.84-92 | |||
| Устройство для автоматической сварки криволинейных швов на плоскости и сфере | 1948 |
|
SU82079A1 |
| US 4401886 A, 30.08.1983 | |||
| Цифровой фильтр | 1986 |
|
SU1348981A1 |
| ЭЛЕКТРИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ С ВЫДЕРЖКОЙ ВРЕМЕНИ | 1929 |
|
SU35101A1 |

