Изобретение относится к оптическим прицелам систем наведения управляемых объектов и может быть использовано в системах управления огнем противовоздушной обороны.
Известен способ сопровождения воздушной цели, который заключается в совмещении наводчиком прицельной марки (перекрестье) визирного канала оптического прицела с целью и измерении дальности дальномерным каналом (патент РФ № 2224206, от 22.07.2002 г., МПК:7 F41G 7/26).
Известен оптический прицел, который в своем составе содержит два канала - визирный и дальномерный. Визирный канал содержит телевизионную или(и) тепловизионную системы (ТС), включающие в свой состав соответствующий видеодатчик (ВД) и монитор для наблюдения фоноцелевой обстановки. Использование в составе прицела ТС обеспечивает совместимость прицела с автоматом сопровождения цели (патент РФ № 2224206, от 22.07.2002 г., МПК:7 F41G 7/26).
Недостатками данного способа и оптического прицела является повышение угловой ошибки наведения прицельной марки визирного канала на цель при осуществлении наведения на маневрирующую цель, что не позволяет осуществить измерения дальности до цели.
Так, например, для зенитной самоходной установки «Гепард» (Германия) ошибки наведения при стрельбе составляют 3-4 мрад. Для боевых машин комплексов «Тунгуска», где введены более сложные алгоритмы формирования сигналов управления приводами, эта ошибка зависит от квалификации наводчика и составляет при средней квалификации наводчика 0,4-0,6 мрад и 0,2-0,3 мрад при высокой квалификации (патент РФ № 2217681, от 19.07.2001 г., МПК: 7F41G 7/20).
В ряде современных оптических прицелов систем управления с видеодатчиками визирного канала используются автоматы сопровождения цели (АСЦ), в которых после обнаружения цели наводчиком на мониторе на цель накладывается строб сопровождения и АСЦ автоматически по заданному алгоритму сопровождает стробом цель и вырабатывает сигналы рассогласования - координаты цели относительно линии визирования (В.В. Молебный. Оптико-локационные системы. М.: Машиностроение, 1981 г., глава 4).
Выходные сигналы АСЦ подаются на приводы оптического прицела, которые разворачивают оптический прицел до уменьшения сигналов рассогласования, и таким образом осуществляется автоматическое слежение за целью.
Такие автоматизированные системы сопровождения цели также имеют угловую ошибку слежения, связанную с угловой ошибкой приводов при сопровождении цели, особенно в условиях слежения за движущейся маневрирующей целью и при работе в движении. Величина этой ошибки, в зависимости от конструкции прицела и условий применения, может составлять 0,3-1,5 мрад.
Для повышения дальности измерения цели дальномер должен иметь малую угловую расходимость лазерного излучения. Ряд современных дальномеров имеет угловую расходимость лазерного излучения около 0,6 мрад.
Поэтому в ряде случаев ошибки слежения за целью превышают угловую расходимость лазерного излучения дальномеров и измерение текущей дальности до цели в реальном времени невозможно.
Наиболее близким к изобретению является способ сопровождения воздушной цели, заключающийся в обнаружении воздушной цели наводчиком переносного комплекса, выборе угловой скорости наведения оптико-электронного модуля (ОЭМ) путем совмещения перекрестья на экране монитора с целью, переводе ОЭМ в режим автоматического слежения за целью путем ввода изображения цели внутрь строба слежения и выдачи команды «Захват», измерении текущей дальности до цели путем излучения лазерного излучения в направлении на цель и приеме отраженного от цели излучения, обеспечения управления пространственным положением лазерного излучения в направлении на цель путем выдачи команд управления, соответствующих угловым координатам цели, на двухкоординатный акустооптический дефлектор, преобразовании цифрового кода дальности в видеосигнал, высвечивании его на мониторе в виде цифровой надписи (патент РФ № 2410629, от 27.01.2010 г., МПК F41G 7/26 (2006.01), G01C 3/08 (2006.01).
Наиболее близким к изобретению является оптический прицел, содержащий оптико-электронный модуль (ОЭМ), в котором размещены оптически сопряженные видеодатчик визирного канала и дальномерный канал. Дальномерный канал состоит из передающего устройства, включающего последовательно соединенные лазерный излучатель и выходную оптическую систему, и приемного устройства, включающего последовательно соединенные приемную оптическую систему, фотоприемное устройство и вычислитель дальности до цели. А также оптический прицел содержит привод наведения и стабилизации, блок преобразования сигналов управления, автомат сопровождения цели, датчики команд управления приводами и АСЦ и монитор. Причем выход видеодатчика визирного канала соединен с первым входом автомата сопровождения цели, второй вход которого соединен с выходом вычислителя дальности до цели, видеовыход видеодатчика визирного канала соединен с входом монитора, а цифровой выход сигналов угловых ошибок слежения за целью соединен с первым входом блока преобразования сигналов управления, выход которого соединен с входами привода наведения и стабилизации, выходы которого механически соединены с оптико-электронным модулем. Выходы датчиков команд управления приводами и АСЦ соединены со вторым входом блока преобразования сигналов управления, третьим входом управления автомата сопровождения цели и входом управления лазерного излучателя дальномерного канала.
При этом в состав оптического прицела введены последовательно соединенные блок масштабирования и блок управления акустооптическим дефлектором, включающий последовательно соединенные блок термокомпенсации, сумматор, двухканальный синтезатор частот, а также двухкоординатный акустооптический дефлектор, установленный между оптически сопряженными лазерным излучателем и выходной оптической системой передающего устройства дальномерного канала, при этом вход двухкоординатного акустооптического дефлектора соединен с выходом лазерного излучателя, а выход двухкоординатного акустооптического дефлектора соединен с входом выходной оптической системы. Цифровой выход сигналов угловых ошибок автомата сопровождения цели соединен с входом блока масштабирования. Выходы блока управления дефлектором соединены с входами двухкоординатного акустооптического дефлектора. Причем диаметр d чувствительной площадки фотодиода фотоприемного устройства дальномерного канала удовлетворяет условию: d>2F·фм, где F - фокусное расстояние приемной оптической системы дальномерного канала; фм - максимальная угловая ошибка сопровождения цели оптическим прицелом (патент РФ № 2410629, от 27.01.2010 г., МПК F41G 7/26 (2006.01), G01C 3/08 (2006.01).
Недостатком оптического прицела является низкая надежность сопровождения высокоскоростной маневрирующей цели из-за отсутствия информации для наводчика переносного комплекса о необходимой величине и направлении изменения (уменьшение или увеличение) угловой скорости движения привода оптико-электронного модуля.
Техническим результатом предлагаемого изобретения является повышение надежности сопровождения быстролетящих и маневрирующих целей за счет выдачи рекомендаций наводчику переносного комплекса о необходимой величине и направлении изменения угловой скорости движения привода оптико-электронного модуля.
Технический результат достигается в способе сопровождения воздушной цели, заключающемся в обнаружении воздушной цели, выборе угловой скорости наведения оптико-электронного модуля (ОЭМ) путем совмещения перекрестья на экране монитора с целью, переводе ОЭМ в режим автоматического слежения за целью путем ввода изображения цели внутрь строба слежения и выдачи команды «Захват», измерении текущей дальности до цели путем излучения лазерного излучения в направлении на цель и приеме отраженного от цели излучения, обеспечения управления пространственным положением лазерного излучения в направлении на цель путем выдачи команд управления, соответствующих угловым координатам цели, на двухкоординатный акустооптический дефлектор, преобразовании цифрового кода дальности в видеосигнал, высвечивании его на мониторе в виде цифровой надписи, дополнительно определяют угловые скорости движения воздушной цели и привода ОЭМ, определяют величину и направления необходимых изменений угловых скоростей движения привода ОЭМ путем сравнения угловых скоростей движения цели и привода ОЭМ, выдают рекомендации наводчику переносного комплекса о необходимой величине и направлении изменения угловой скорости движения привода ОЭМ.
Способ реализуется в оптическом прицеле, содержащим оптико-электронный модуль (ОЭМ), в котором размещены видеодатчик визирного канала и дальномерный канал, состоящий из передающего устройства, включающего соединенные лазерный излучатель и выходную оптическую систему, и приемного устройства, включающего последовательно соединенные приемную оптическую систему, фотоприемное устройство и вычислитель дальности до цели, а также привод наведения и стабилизации, блок преобразования сигналов управления, автомат сопровождения цели, датчики команд управления приводами и монитор, причем выход видеодатчика визирного канала соединен с первым входом автомата сопровождения цели, второй вход которого соединен с выходом вычислителя дальности до цели, видеовыход автомата сопровождения цели соединен с входом монитора, а цифровой выход сигналов угловых ошибок автомата сопровождения цели соединен с первым входом блока преобразования сигналов управления, выход которого соединен с входами привода наведения и стабилизации, выходы которого механически соединены с оптико-электронным модулем, выходы датчиков команд управления приводами соединены со вторым входом блока преобразования сигналов управления, третьим входом управления автомата сопровождения цели и входом управления лазерного излучателя дальномерного канала, последовательно соединенные блок масштабирования, блок электронный управления акустооптическим дефлектором, включающий последовательно соединенные блок термокомпенсации, сумматор, двухканальный синтезатор частот, а также двухкоординатный акустооптический дефлектор, установленный между лазерным излучателем и выходной оптической системой передающего устройства дальномерного канала, при этом вход двухкоординатного акустооптического дефлектора соединен с выходом лазерного излучателя, а выход двухкоординатного акустооптического дефлектора соединен с входом выходной оптической системы, цифровой выход сигналов угловых ошибок автомата сопровождения цели соединен с входом блока масштабирования, выходы блока электронного управления акустооптическим дефлектором соединены с входами двухкоординатного акустооптического дефлектора, причем диаметр d чувствительной площадки фотодиода фотоприемного устройства дальномерного канала удовлетворяет условию d>2F·фм, где F - фокусное расстояние приемной оптической системы дальномерного канала; фм - максимальная угловая ошибка сопровождения цели оптическим прицелом, дополнительно введен блок анализа угловой скорости перемещения цели, первый и второй входы которого соединены соответственно с первым выходом датчиков команд управления приводами и первым выходом автомата сопровождения цели, а первый, второй и третьи выходы соединены со вторым, третьим и четвертыми входами монитора, блок анализа угловой скорости перемещения цели состоит из блока определения угловой скорости вращения привода и блока определения угловой скорости перемещения цели, вычитающего устройства, первого и второго диодов, при этом первый и второй входы блока анализа угловой скорости перемещения цели являются соответственно входами блока определения угловой скорости движения привода и блока определения угловой скорости движения цели, выходы которых соединены соответственно с первым и вторым входами вычитающего устройства, выход которого соединен с входами первого и второго диодов, выход вычитающего устройства, выходы первого и второго диодов, являются, соответственно, первым, вторым и третьим выходами блока анализа угловой скорости перемещения цели, блок определения угловой скорости перемещения привода (цели) состоит из первого и n вторых элементов НЕ, первого и n вторых пороговых устройств, задатчика сигналов, вычитающего устройства, дифференцирующей цепи, первого и второго элементов ИЛИ, сдвигового регистра, генератора сигналов, n элементов И, n счетчиков, n ключей, делителя, причем вход блока определения угловой скорости перемещения цели, является первыми входами первого и n вторых пороговых устройств, вторые входы которых соединены соответственно с первым и n вторыми выходами задатчика сигналов, выход первого порогового устройства соединен с входом первого элемента НЕ, входом дифференцирующей цепи и первым входом вычитающего устройства, выходы n вторых пороговых устройств соединены с входами первого элемента ИЛИ, выход которого соединен с первым входом сдвигового регистра и вторым входом вычитающего устройства, выход дифференцирующей цепи соединен со вторыми входами сдвигового регистра и n счетчиков, выход генератора импульсов соединен с третьими входами сдвигового регистра и n элементов И, выход первого элемента НЕ соединен с первыми входами n элементов И, выходы сдвигового регистра через n вторые элементы НЕ соединены со вторыми входами n элементов И, выходы которых соединены с первыми входами счетчиков, выходы которых соединены со входами второго элемента ИЛИ, выход которого соединен с первым входом делителя, вторые входы которого соединены с выходами n ключей, первые и вторые входы которых соединены соответственно с выходом вычитающего устройства и выходами сдвигового регистра, выход делителя является выходом блока определения угловой скорости движения привода (цели).
На фиг.1 приведена блок-схема оптического прицела со следящим дальномером, где 1 - оптико-электронный модуль (ОЭМ), 2 - видеодатчик визирного канала, 3 - дальномерный канал, 4 - передающее устройство, 5 - приемное устройство, 6 - привод наведения и стабилизации ОЭМ, 7 - блок преобразования сигналов управления, 8 - автомат сопровождения цели (АСЦ), 9 - датчики команд управления приводами, 10 - монитор, 11 - блок масштабирования, 12 - блок электронный управления акустооптическим дефлектором, 13 - блок анализа угловой скорости движения цели, 14 - двухканальный синтезатор частот, 15 - сумматор, 16 - блок термокомпенсации, 17 - лазерный излучатель, 18 - двухкоординатный акустооптический дефлектор, 19 - выходная оптическая система, 20 - вычислитель дальности до цели, 21 - фотоприемное устройство, 22 - приемная оптическая система, 23 - наводчик.
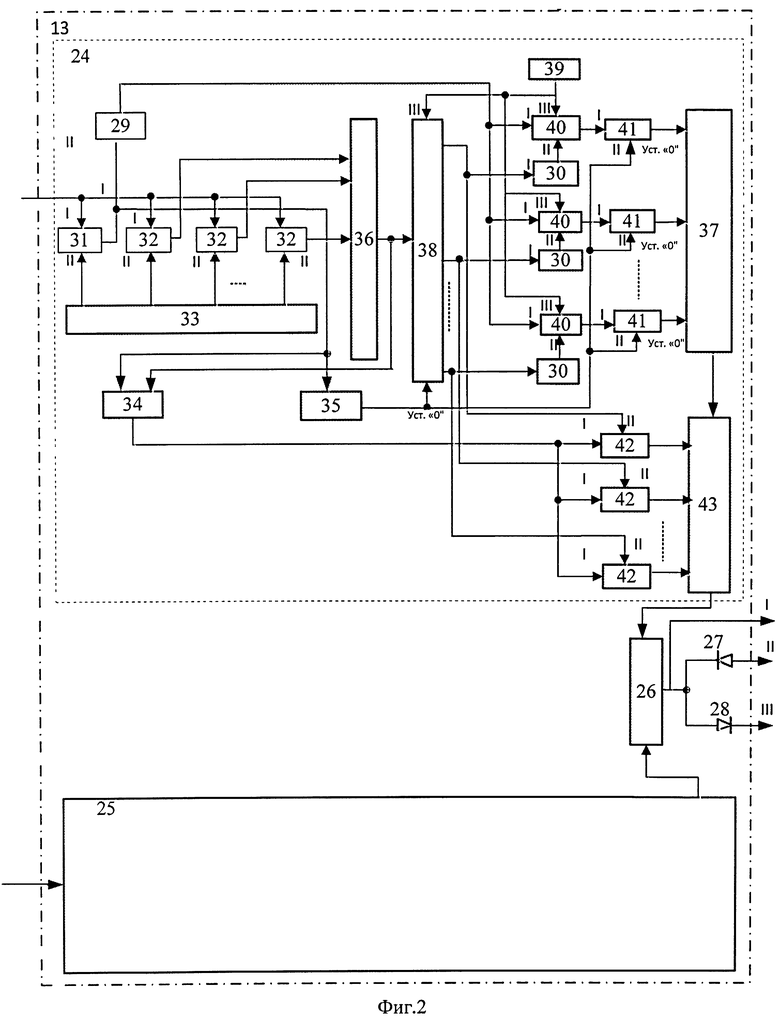
На фиг.2 приведена блок-схема блока 13 анализа угловой скорости движения цели, где 24 - блок определения угловой скорости вращения привода, 25 - блок определения угловой скорости перемещения цели, 26 -вычитающее устройство, 27 - первый и 28 - второй диоды, кроме того, приведена структурная схема блока 24 определения угловой скорости перемещения привода, где 29 первый и 30 n вторых элементов НЕ, 31 - первый и 32 - n вторых пороговых устройств, 33 - задатчик сигналов, 34 -вычитающее устройство, 35 - дифференцирующая цепь, 36 - первый и второй 37 - элементы ИЛИ, 38 - сдвиговой регистр, 39 - генератора сигналов, 40 - n элементы И, 41 - n счетчики, 42 - n ключи, 43 - делитель.
Оптический прицел со следящим дальномером содержит оптико-электронный модуль (ОЭМ) 1, в котором размещены оптически сопряженные видеодатчик визирного канала 2 и дальномерный канал 3, включающий передающее устройство 4 и приемное устройство 5, привод 6 наведения и стабилизации ОЭМ, блок 7 преобразования сигналов управления, автомат 8 сопровождения цели (АСЦ), датчики 9 команд управления (ДКУ) приводами, монитор (видеоконтрольное устройство) 10, блок 11 масштабирования (БМ), блок 12 электронный управления акустооптическим дефлектором, блок 13 определения угловой скорости движения цели.
Передающее устройство 4 дальномерного канала 3 состоит из последовательно соединенного лазерного излучателя 17, двухкоординатного акустооптического дефлектора 18 и выходной оптической системы 19.
Приемное устройство 5 дальномерного канала 3 состоит из последовательно соединенных приемной оптической системы 22, фотоприемного устройства 21 и вычислителя дальности до цели 20.
Блок электронный управления акустооптическим дефлектором 12, состоит из двухканального синтезатора частот 14, сумматора 15 и блока термокомпенсации 16.
Блок 13 анализа угловой скорости движения цели содержит блок 24 определения угловой скорости движения привода и блок 25 определения угловой скорости движения цели, вычитающее устройство 26, первый 27 и второй 28 диоды, при этом блоки 24 (25) определения угловой скорости движения привода и цели состоят из первого 29, n вторых 30 элементов НЕ, первого 31 и n вторых 32 пороговых устройств, задатчика 33 сигналов, вычитающего устройства 34, дифференцирующей цепи 35, первого 36 и второго 37 элементов ИЛИ, сдвигового регистра 38, генератора 39 сигналов, n элементов И 40, n счетчиков 41, n ключей 42, делителя 43.
Блок 13 анализа угловой скорости движения цели позволяет наводчику осуществлять надежное сопровождение маневренной цели за счет выдачи дополнительной информации о величине и направлении (увеличение или уменьшение) рассогласования по угловой скорости между целью и приводами.
Оптический прицел работает следующим образом.
Наводчик 23, обнаружив изображение цели на экране монитора 10, перемещая кнюпель управления приводами ДКУ 9, задает скорость наведения ОЭМ по угловым координатам и, управляя приводами ОЭМ 1, старается совместить перекрестье на экране монитора 10 с целью (фиг.1). На экране монитора имеется изображение строба захвата цели, которое в исходном состоянии, без автосопровождения цели, периодически меняет яркость. При вводе изображения цели внутрь строба слежения наводчик нажимает кнопку «Захват» ДКУ 9 и прицел переходит в режим автоматического слежения за целью, стараясь совместить перекрестье прицела (линию визирования) с целью. В режиме автосопровождения изображение строба захвата цели на экране монитора яркость не меняет.
Цель находится внутри строба сопровождения, но из-за ошибок приводов она смещена относительно линии прицеливания на некоторый угол. Цифровые коды угловых координат цели от АСЦ поступают на первый вход блока преобразования сигналов управления 7, а также поступают на вход БМ 11. Блок преобразования сигналов управления 7 преобразует их в сигналы команд управления приводом наведения и стабилизации ОЭМ 6, обеспечивая тем самым удержание цели внутри строба захвата цели.
При переходе прицела в режим автоматического слежения за целью возможно измерение текущей дальности до цели. Наводчик нажимает кнопку «Текущая дальность» ДКУ 9, при этом лазерный излучатель 17 передающего устройства 4 дальномерного канала 3 формирует лазерные импульсы с заданной частотой повторения. Цифровые коды сигналов угловых координат цели от АСЦ, поступившие на вход блока масштабирования 11, преобразуются последним, с учетом требуемых для работы коэффициентов преобразования, в цифровые коды управления дефлекторами и поступают на входы блока электронного управления дефлекторами 12. В нем входные цифровые коды управления дефлекторами преобразуются в высокочастотные сигналы управления fz и fy, которые подаются на двухкоординатный акустооптичеcкий дефлектор 18 передающего устройства 4 дальномерного канала 3, вызывая угловое смещение лазерного пучка на величину, пропорциональную величине измеренных угловых координат цели. Тем самым, несмотря на угловое смещение цели относительно оптической оси прицела, лазерный пучок передающего устройства 4 дальномерного канала 3 направлен на цель.
Отраженное от цели лазерное излучение попадает на входной зрачок приемной оптической системы 22 приемного устройства 5 дальномерного канала 3 и фокусируется на фотодиоде фотоприемного устройства 21, вызывая появление на его выходе электрического импульса, задержанного относительно излученного лазерного импульса на время, пропорциональное дальности до цели.
Вычислитель дальности до цели 20 приемного устройства 5 дальномерного канала 3 измеряет этот временной интервал и формирует цифровой код дальности, который может АСЦ преобразоваться в видеосигнал и высвечиваться на мониторе 10 в виде цифровой надписи (фиг.1). Цифровой код дальности может поступать в вычислитель системы управления огнем для принятия соответствующих решений.
Блок 11 масштабирования обеспечивает сопряжение измеренных угловых координат цели и величин цифровых кодов управления дефлекторами, чтобы обеспечить равенство углового смещения лазерного излучения дальномерного канала и величины измеренных угловых координат цели. Пусть величина вектора угловых координат цели относительно перекрестья прицела, измеренная АСЦ, равна 
Модуль вектора угловых координат цели может быть записан в виде:

Код Dц формируется на выходе АСЦ и, следовательно, он равен 
Блок электронный управления акустооптическим дефлектором 12 в простейшем случае состоит из двухканального синтезатора частот 14. При выполнении двухкоординатного акустооптического дефлектора 18 из монокристалла парателлурита угол сканирования дефлектора может составлять 3 градуса при изменении высокочастотных сигналов управления fz и fy в частотном диапазоне 64-96 МГц. Центральная частота высокочастотных сигналов равна 80 МГц. При этой частоте направление лазерного пучка на выходе дальномерного канала 3 коллинеарно оптической оси прицела. Время переключения дефлектором лазерного пучка из одного углового положения в произвольное другое составляет не более 20 мкс.
Блок электронный управления акустооптическим дефлектором 12 может быть реализован, например, на двух цифровых микросхемах синтезатора частот AD9851. При использовании 13-разрядного входа управления по каждому каналу синтезатора дефлектор обеспечивает угловое смещение лазерного пучка на своем выходе, равное 1,35 угловых секунд на единицу команды управления, подаваемой на вход блока управления.
Угол отклонения γд лазерного пучка на выходе передающего устройства 4 дальномерного канала 3 можно представить выражением: γ Д =К Д D а Г п , где Кд - совместный коэффициент пропорциональности для синтезатора частот и акустооптического дефлектора; Гп - угловое увеличение выходной оптической системы 18; Da - величина кода управления, поданная на вход синтезатора частот.
В предлагаемом изобретении угловое увеличение выходной оптической системы может составлять величину от 1/2 до 1/8 в зависимости от решаемых задач. Для обеспечения равенства углового смещения лазерного излучения дальномерного канала и величины измеренных угловых координат цели, т.е. Фц=γ Д , коэффициент передачи блока масштабирования 11 определяется в виде: Kбм=Da/Dц= 1/(KдKoГп).
Зависимость угла отклонения γ Д лазерного пучка на выходе передающего устройства 4 дальномерного канала 3 более полно, с учетом рабочей температуры Тт оптического прицела, можно представить выражением:
γ Д =К Д D а Г П+ Kт·ΔT·Гп ,
где Kт - температурный коэффициент, равный ориентировочно 10-3;
ΔT =(Тт-25°С).
При работе прицела в широком температурном диапазоне, особенно с очень узконаправленным лазерным пучком дальномерного канала, учитывается влияние температуры.
Блок электронный управления акустооптическим дефлектором 12 состоит в этом случае из двухканального синтезатора частот 14, сумматора 15 и блока термокомпенсации 16. Блок термокомпенсации 16 формирует на выходе цифровой сигнал DТ=- Kт·ΔT·Гп. После сложения в сумматоре 15 сигналов Dт и Da влияние температуры на угол сканирования устраняется. Реализация функции суммирования кодов и формирования сигнала DT легко реализуется на основе современных микропроцессоров и датчиков температуры, например AD22100 ST.
Диаметр d чувствительной площадки фотодиода фотоприемного устройства дальномерного канала должен соответствовать величине d > 2F·фм, где F - фокусное расстояние приемной оптической системы дальномерного канала, фм - максимальная угловая ошибка сопровождения цели оптическим прицелом. Это необходимо для приема отраженных от цели лазерных импульсов при угловом смещении цели относительно оптической оси прицела. При этом диаметр фотодиода для условий: F=200 мм, фм=5 угл. мин равен 0,58 мм, выпускаемые промышленностью фотодиоды, предназначенные для приема коротких лазерных импульсов, например фирмы HAMAMATSU, имеют целый ряд диаметров фоточувствительных площадок, в том числе 0,5 и 1,0 мм.
Блок 13 анализа угловой скорости перемещения цели позволяет на основе сравнения угловой скорости движения привода и угловой скорости движения цели, дополнительно выдать информацию наводчику о величине и направлении необходимой угловой скорости движения привода для исключения срыва сопровождения высокоскоростной и маневрирующей цели (фиг.1).
Рассмотрим определения угловой скорости движения привода (угловая скорость движения цели определяется идентично).
С выхода датчиков 9 команд управления приводами сигнал, пропорциональный угловым положениям привода, поступает на вход блока 24 определения угловой скорости перемещения привода и, соответственно, на первые входы первого 31 и n вторых 32 пороговых устройств, на вторые входы которых поступают сигналы соответственно с первого и n вторых выходов задатчика 33 сигналов (фиг.2).
В процессе сопровождения цели, в момент превышения сигнала соответствующему текущему угловому положению привода 6 над первым пороговым значением, поступающим с первого выхода задатчика 33, сигнал с выхода первого 31 порогового устройства поступает на вход первого 29 элемента НЕ, а также на вход дифференцирующей цепи 35 и первый вход вычитающего устройства 34 (фиг.2).
С выхода дифференцирующей цепи 35 сигнал поступает на вторые входы сдвигового регистра 38 и n счетчиков 41, обеспечивая их «обнуления», кроме того, с выхода генератора 39 импульсов сигналы поступают на третий вход сдвигового регистра 38, обеспечивая его функционирование.
Сигнал, поступающий на первый вход вычитающего устройства 34, соответствует первому заданному значению углового положения φ1 привода.
В процессе дальнейшего сопровождения цели осуществляется движении привода относительно n заданных угловых положений привода, при этом происходит срабатывания одного из n вторых 32 пороговых устройств, в момент превышения текущего углового положения привода одного из n заданных угловых положений, сигнал с одного из выходов n вторых 32 пороговых устройств поступает на один из входов первого 36 элемента ИЛИ, с выхода которого сигнал поступает на первый вход сдвигового регистра 38 и второй вход вычитающего устройства 34.
На выходе вычитающего устройства 34 будет формироваться сигнал Δφ= φ1 - φ2i, пропорциональный разности между первым заданным угловым значением и вторыми заданными угловыми значениями привода.
Временной интервал Δti движения привода, соответствующий скорости движения привода относительно заданных угловых положений, определяется следующим образом.
После прохода приводом 6 первого заданного углового положения сигнал с выхода первого 29 элемента НЕ поступает на первые входы n элементов И 40, на вторые входы которого периодически поступают сигналы после прохода привода других заданных угловых положений, с одного из выходов сдвигового регистра 38 через один из n вторых элементов НЕ 30, обеспечивая тем самым прохождения импульсов с выхода генератора 39 импульсов, через третьи входы n элементов И 40 на первые входы одного из n счетчиков 41.
Таким образом, в процессе движения привода 6, на выходах n счетчиков 41 записываются временные интервалы Atj относительно заданных угловых положений, которые соответствуют текущим значениям угло-вой скорости движения привода 6.
В процессе движения привода 6 сигналы Δti с выходов счетчиков 41 через входы второго элемента ИЛИ 37 поступают на первый вход делителя 43, на вторые входы которого через n ключей 42 поступают сигналы, пропорциональные Δφ с выхода вычитающего устройства 34.
Таким образом, на выходе делителя 43 формируется сигнал
Vприв.= Δφ /Δt, соответствующий угловой скорости движения привода.
С выхода делителя 43 сигнал поступает на первый вход вычитающего устройства 26, на второй вход которого поступает сигнал, соответствующий угловой скорости перемещения цели Vц.= Δφ /Δt с выхода блока 25 (фиг.1).
Блок 25 на основе обработки сигнала, поступающего с первого выхода автомата 8 сопровождения цели, в соответствии с изложенным выше алгоритмом работы блока 24 определяет угловую скорость перемещения цели.
Сигнал с выхода вычитающего устройства 26 поступает на входы первого 27 и второго 28 диодов, которые определяют направление (увеличение или уменьшения) динамики изменения скорости перемещения приводов.
Сигналы с выхода вычитающего устройства 26, выходов первого 27 и второго 28 диодов поступают на второй, третий и четвертый входы монитора 10.
Наводчик на основе информации о необходимой величине и направлении изменения угловой скорости движения привода осуществляет корректировку скорости перемещения привода, обеспечивая тем самым повышение надежности сопровождения высокоскоростной и маневрирующей цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478898C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| Комплекс вооружения боевой машины с информационно-управляющей системой | 2016 |
|
RU2628027C1 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
Изобретение относится к оптическим прицелам систем наведения управляемых объектов и может быть использовано в системах управления огнем противовоздушной обороны. Сущность изобретения заключается в том, что обнаруживают воздушную цель, выбирают угловую скорость наведения оптико-электронного модуля (ОЭМ) путем совмещения перекрестья на экране монитора с целью, переводят ОЭМ в режим автоматического слежения за целью путем ввода изображения цели внутрь строба слежения и выдачи команды «Захват», измеряют текущую дальность до цели путем излучения лазерного излучения в направлении на цель и приеме отраженного от цели излучения, обеспечивают управление пространственным положением лазерного излучения в направлении на цель путем выдачи команд управления, соответствующих угловым координатам цели, на двухкоординатный акустооптический дефлектор, преобразуют цифровой код дальности в видеосигнал, высвечивают его на мониторе в виде цифровой надписи, определяют угловые скорости движения воздушной цели и привода ОЭМ, определяют величину и направления необходимых изменений угловых скоростей движения привода ОЭМ путем сравнения угловых скоростей движения цели и привода ОЭМ, выдают рекомендации наводчику переносного комплекса о необходимой величине и направлении изменения угловой скорости движения привода ОЭМ. Технический результат изобретения - повышение надежности сопровождения быстролетящих и маневрирующих целей. 2 н.п. ф-лы, 2 ил.
1. Способ сопровождения воздушной цели, заключающийся в обнаружении воздушной цели наводчиком переносного комплекса, выборе угловой скорости наведения оптико-электронного модуля (ОЭМ) путем совмещения перекрестья на экране монитора с целью, переводе ОЭМ в режим автоматического слежения за целью путем ввода изображения цели внутрь строба слежения и выдачи команды «Захват», измерении текущей дальности до цели путем излучения лазерного излучения в направлении на цель и приема отраженного от цели излучения, обеспечении управления пространственным положением лазерного излучения в направлении на цель путем выдачи команд управления, соответствующих угловым координатам цели, на двухкоординатный акустооптический дефлектор, преобразовании цифрового кода дальности в видеосигнал, высвечивании его на мониторе в виде цифровой надписи, отличающийся тем, что определяют угловые скорости движения воздушной цели и привода ОЭМ, определяют величину и направления необходимых изменений угловых скоростей движения привода ОЭМ путем сравнения угловых скоростей движения цели и привода ОЭМ, выдают рекомендации наводчику переносного комплекса о необходимой величине и направлении изменения угловой скорости движения привода ОЭМ.
2. Оптический прицел со следящим дальномером, содержит оптико-электронный модуль, в котором размещены видеодатчик визирного канала, дальномерный канал и приемное устройство, а также привод наведения и стабилизации, блок преобразования сигналов управления, автомат сопровождения цели, датчики команд управления приводами и автоматом сопровождения цели, монитор, последовательно соединенные блок масштабирования и блок электронный управления акустооптическим дефлектором, который состоит из последовательно соединенных блока термокомпенсации, сумматора, двухканального синтезатора частоты, дальномерный канал содержит передающее устройство в составе последовательно соединенных лазерного излучателя, двухкоординатного акустооптического дефлектора и выходной оптической системы, приемное устройство состоит из последовательно соединенных приемной оптической системы, фотоприемного устройства и вычислителя дальности до цели, при этом выход видеодатчика визирного канала соединен с первым входом автомата сопровождения цели, второй вход которого соединен с выходом вычислителя дальности до цели, второй выход автомата сопровождения цели, который является видеовыходом, соединен с входом монитора, а первый выход автомата сопровождения цели, который является цифровым выходом сигналов угловых ошибок, соединен с первым входом блока преобразования сигналов управления, выход которого соединен с входами привода наведения и стабилизации, выходы которого механически соединены с оптико-электронным модулем, первый и второй выходы датчиков команд управления приводами соединены соответственно со вторым входом блока преобразования сигналов управления и входом управления автомата сопровождения цели, кроме того, при нажатии наводчиком кнопки «текущая дальность» датчика команд управления приводами, лазерный излучатель передающего устройства формирует лазерные импульсы с заданной частотой повторения, первый выход автомата сопровождения цели, который является цифровым выходом сигнала угловых ошибок, соединен с входом блока масштабирования, выходы блока электронного управления акустооптическим дефлектором соединены со вторыми входами двухкоординатного акустооптического дефлектора, причем диаметр d чувствительной площадки фотодиода фотоприемного устройства дальномерного канала удовлетворяет условию d ≥2F·фм, где F - фокусное расстояние приемной оптической системы дальномерного канала; фм - максимальная угловая ошибка сопровождения цели оптическим прицелом, отличающийся тем, что введен блок анализа угловой скорости перемещения цели, первый и второй входы которого соединены соответственно с первым выходом датчиков команд управления приводами и выходом автомата сопровождения цели, а первый, второй и третьи выходы соединены со вторым, третьим и четвертыми входами монитора, блок анализа угловой скорости перемещения цели состоит из блока определения угловой скорости вращения привода и блока определения угловой скорости перемещения цели, вычитающего устройства, первого и второго диодов, при этом первый и второй входы блока анализа угловой скорости перемещения цели являются соответственно входами блока определения угловой скорости движения привода и блока определения угловой скорости движения цели, выходы которых соединены соответственно с первым и вторым входами вычитающего устройства, выход которого соединен с входами первого и второго диодов, выход вычитающего устройства, выходы первого и второго диодов являются соответственно первым, вторым и третьим выходами блока анализа угловой скорости перемещения цели, блок определения угловой скорости перемещения привода (цели) состоит из первого и n вторых элементов НЕ, первого и n вторых пороговых устройств, задатчика сигналов, вычитающего устройства, дифференцирующей цепи, первого и второго элементов ИЛИ, сдвигового регистра, генератора сигналов, n элементов И, n счетчиков, n ключей, делителя, причем вход блока определения угловой скорости перемещения привода (цели) является первыми входами первого и n вторых пороговых устройств, вторые входы которых соединены соответственно с первым и n вторыми выходами задатчика сигналов, выход первого порогового устройства соединен с входом первого элемента НЕ, входом дифференцирующей цепи и первым входом вычитающего устройства, выходы n вторых пороговых устройств соединены с входами первого элемента ИЛИ, выход которого соединен с первым входом сдвигового регистра и вторым входом вычитающего устройства, выход дифференцирующей цепи соединен со вторыми входами сдвигового регистра и n счетчиков, выход генератора импульсов соединен с третьими входами сдвигового регистра и n элементов И, выход первого элемента НЕ соединен с первыми входами n элементов И, выходы сдвигового регистра через n вторые элементы НЕ соединены со вторыми входами n элементов И, выходы которых соединены с первыми входами счетчиков, выходы которых соединены со входами второго элемента ИЛИ, выход которого соединен с первым входом делителя, вторые входы которого соединены с выходами n ключей, первые и вторые входы которых соединены соответственно с выходом вычитающего устройства и выходами сдвигового регистра, выход делителя является выходом блока определения угловой скорости движения привода (цели).
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |
| СПОСОБ НАВЕДЕНИЯ ОПТИЧЕСКОГО ПРИЦЕЛА НА ЦЕЛЬ | 2001 |
|
RU2217681C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |

