Область техники. Изобретение относится к области пассивной локации, использующей электромагнитные волны, иные чем радиоволны, конкретно к оптико-электронному комплексу (ОЭК) для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов (НВОБ).
Уровень техники. Известны комплексы пассивной локации /1–2/, содержащие инфракрасный пеленгатор кругового обзора и телевизионную фотокамеру (телекамеру) с длиннофокусным объективом (телескопом), соединенные по цифровым выходам с электронной вычислительной машиной (ЭВМ) управления и идентификации типа объектов. Инфракрасный пеленгатор обеспечивает скрытое обнаружения наземных и воздушных объектов (НВОБ) по их тепловому излучению и передает целеуказание обнаруженных объектов телекамере. По полученному целеуказанию объектив телекамеры фокусируется на НВОБ и увеличенное его изображение на фотоприемной матрице телекамеры, преобразуется в цифровую форму и передается на ЭВМ. По виду изображения объекта, размеру засветки и текущему её положению на фотоприемной матрице телекамеры ЭВМ производит идентификацию типа объекта и косвенное измерение его пространственных координат, включая дальность, азимут и угол места.
Прототип изобретения. Наиболее близким из известных технических решений по технической сущности к заявляемому изобретению относится мобильный ОЭК по патенту RU 2530185 /2/ для оптического обнаружения, сопровождения и распознавания НВОБ.
Указанный ОЭК /2/ включает обзорный тепловизор (ОТ) для пассивного обнаружения НВОБ и телевизионную оптическую систему (ТОС) для точного измерения координат НВОБ. ТОС установлена на опорно-поворотном устройстве (ОПУ) и связана интерфейсными линиями связи через электронную вычислительную машину (ЭВМ) сопровождения ТОБ и управления (СУ) с силовыми приводами ОПУ с автоматизированным рабочим местом (АРМ) оптико-электронного комплекса (ОЭК). Указанное АРМ ОЭК включает соединенные интерфейсными линиями связи ЭВМ АРМ, панель управления и блок мониторов для отображения обстановки в зоне ответственности ОЭК.
При этом обзорный тепловизор (ОТ) и телевизионная оптическая система (ТОС) установлены на общей платформе ОПУ, а объектив (телескоп) телекамер ТОС выполнен с переменным фокусным расстоянием.
Основной недостаток прототипа. Недостатком прототипа /2/ является трудность обслуживания множества подвижных НВОБ, связанная с инерционностью фокусной электромеханики телескопа и с жесткой связкой осей визирования ОТ и ТОС из-за установки на общей платформе.
Из-за этого функциональное назначение прототипа /2/ ограничилось обнаружением, сопровождением и распознаванием только малоподвижных НВОБ наземного или надводного происхождения.
Желательно создание ОЭК с расширенными функциональными возможностями, позволяющего обслуживать потоки движения НВОБ, как наземного и надводного, так и воздушного происхождения.
Постановка задачи.
Задачей изобретения является расширение функциональных возможности ОЭК по обслуживанию множества подвижных НВОБ и идентификации их типа.
Техническим результатом, обеспечивающим решение этой задачи, является повышение производительности ОЭК.
Сущность изобретения.
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что предложенный ОЭК включает обзорный тепловизор (ОТ) для пассивного обнаружения наземных и воздушных объектов (НВОБ) и телевизионную оптическую систему (ТОС) для точного измерения координат НВОБ. ТОС установлена на опорно-поворотном устройстве (ОПУ) и связана интерфейсными линиями связи через электронную вычислительную машину (ЭВМ) сопровождения НВОБ и управления (СУ) силовыми приводами ОПУ с автоматизированным рабочим местом (АРМ) оптико-электронного комплекса (ОЭК). Указанная АРМ ОЭК включает соединенные интерфейсными линиями связи ЭВМ АРМ, панель управления и блок мониторов для отображения обстановки в зоне ответственности ОЭК.
Согласно изобретению ОЭК дополнительно содержит ЭВМ управления обзором и обработкой тепловизионных сигналов ОТ, многоканальный блок модулей автозахвата и идентификации (МАИ) НВОБ. При этом обзорный тепловизор (ОТ) выполнен с возможностью установки на выносной или выдвижной мачте и соединен по целеуказанию с телевизионной оптической системой (ТОС) через ЭВМ ОТ и ЭВМ СУ. Сигнальные входы ЭВМ СУ по результатам первичной обработки телевизионных видеоизображений НВОБ соединены с выходами блока МАИ. В свою очередь сигнальные входы МАИ по телевизионному видеоизображению НВОБ соединены с сигнальными выходами ТОС. ТОС включает блок оптических приёмников (ОП) и лазерный дальномер (ЛД). Для одновременного сопровождения, автозахвата и идентификации типа НВОБ в дальней, средней и ближней зоне их обнаружения ОП указанного блока оснащены объективами с соответствующими различными фокусными расстояниями. Лазерный дальномер (ЛД) соединен по сигналам его включения и измерения дальности до НВОБ с ЭВМ АРМ через ЭВМ СУ.
Достижение заявленного технического результата и поставленной задачи.
Дополнительное введение ЭВМ для управления обзором и обработкой тепловых сигналов обзорного теплопеленгатора (ОТ), многоканального блока МАИ НВОБ по сигналам телевизионной оптической системы (ТОС), а также оснащение их раздельными силовыми приводами ОПУ и многоканальное выполнение ТОС с объективами различного фокусного расстояния позволяет одновременно и независимо друг от друга сканировать зону ответственности ОЭК, сопровождать, распознавать и идентифицировать тип НВОБ.
Следствием этих технических преимуществ является повышение производительности ОЭК и расширение его функциональных возможностей.
Сущность изобретения поясняется чертежами.
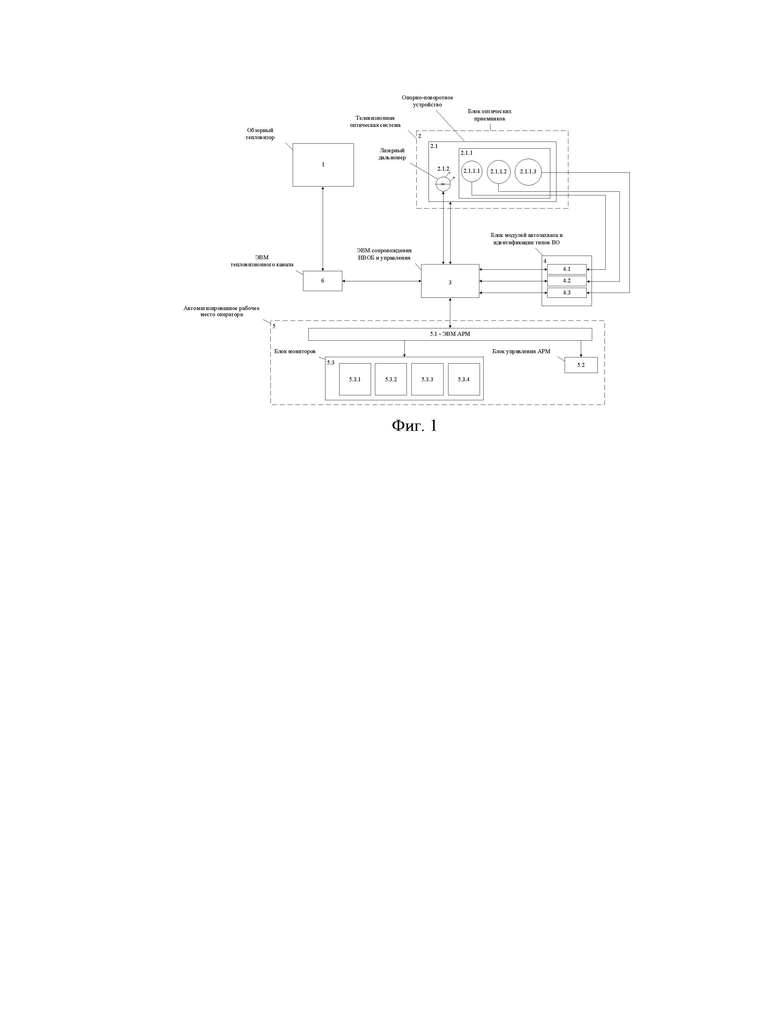
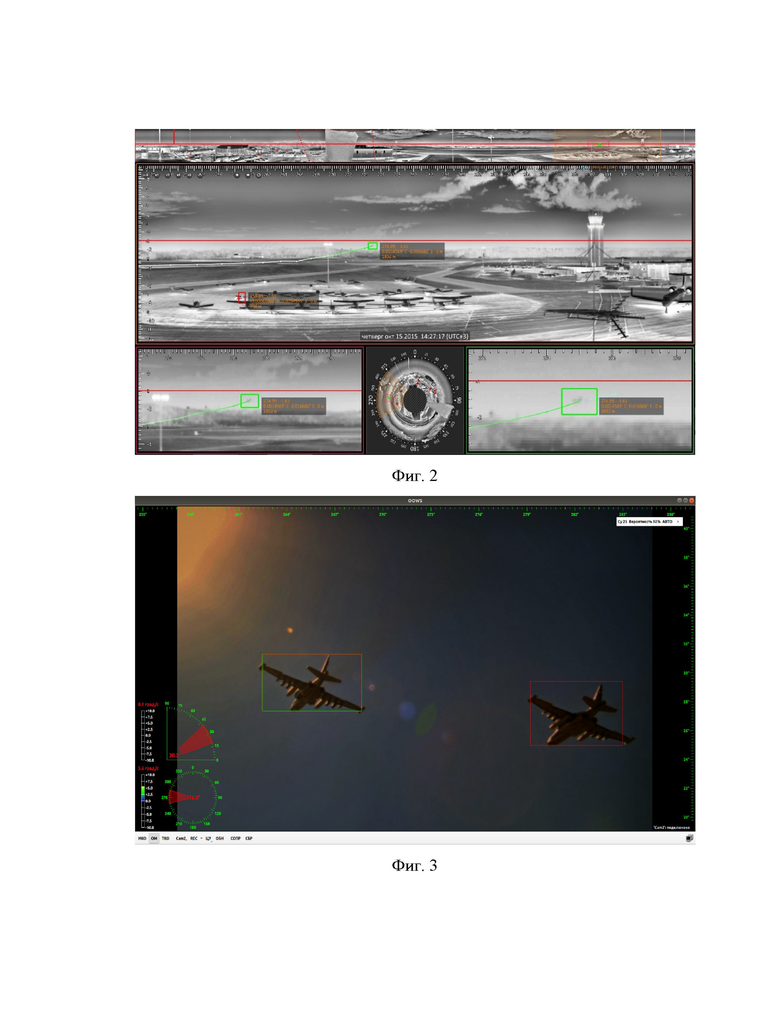
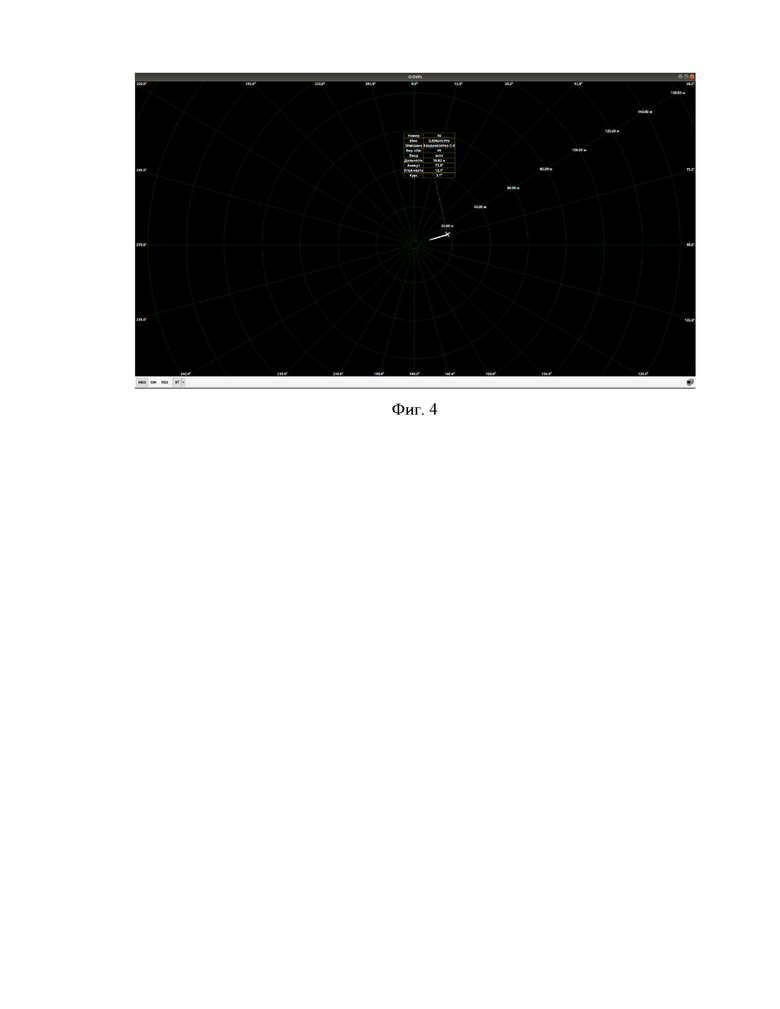
На фиг. 1 представлена функциональная схема ОЭК, на фиг. 2– фотографии экрана монитора АРМ 5 с обзорной информацией от ОП 1, на фиг. 3 - фотографии экрана монитора АРМ 5 с телевизионной информацией от ТОС 2 и на фиг. 4 - фотографии экрана монитора АРМ 5 с траекторной информацией сопровождаемого НВОБ.
На фиг. 1 – фиг. 3 обозначены:
1 – обзорный тепловизор (ОТ);
2 – телевизионная оптическая система (ТОС);
2.1 – опорно-поворотное устройство;
2.1.1 – блок оптических приемников (ОП);
2.1.1.1 – первый ОП1 с объективом с фокусным расстоянием 130 мм;
2.1.1.2 – второй ОП2 с объективом с фокусным расстоянием 490 мм;
2.1.1.3 – третий ОП3 с объективом с фокусным расстоянием 1450 мм;
2.1.2 – лазерный дальномер (ЛД);
3 – электронно-вычислительная машина (ЭВМ) 3 сопровождения и управления (СУ) силовыми приводами ОПУ 2.1 (ЭВМ СУ);
4 – многоканальный блок модулей автозахвата и идентификации (МАИ) НВОБ;
4.1, 4.2, 4.3, – первый, второй и третий МАИ соответственно.
5 – автоматизированное рабочее место (АРМ) оператора ОЭК;
5.1 – ЭВМ АРМ;
5.2 – панель управления;
5.3 – блок мониторов;
5.3.1 – монитор отображения технической информации;
5.3.2 – монитор отображения видеопотока тепловых сигналов;
5.3.3 – монитор отображения видеопотока телевизионных сигналов;
5.3.4 – монитор отображения трасс движения тепловых объектов;
6 – ЭВМ управления обзором и обработкой сигналов НВОБ.
Раскрытие сущности изобретения
Согласно фиг. 1 оптико-электронный комплекс (ОЭК) для оптического обнаружения, сопровождения и распознавания НВОБ включает обзорный тепловизор (ОТ) 1 для пассивного обнаружения НВОБ и телевизионную оптическую систему (ТОС) 2 для точного измерения координат, дальности, автоматического захвата на сопровождение и идентификации типа НВОБ. Обзорный тепловизор (ОТ) 1 содержит тепловизионную головку (ТГ) на индивидуальном ОПУ с индивидуальным силовым приводом, выполненную с возможностью кругового обзора воздушного пространства в азимутальной плоскости и секторного обзора – в диапазоне углов места от –20° до +90° и снабженную механическими замками крепления на выносной или выдвижной мачте. Объектив ТГ оснащен светозащитным козырьком и средствами его обмыва. По сигнальным выходам и командам управления ОП 1 соединен с ЭВМ 6 управления обзором и обработкой тепловизионных сигналов ОТ 1. ЭВМ 6 ОТ выполнена на операционной системе «Linux» и содержит установленные на общей активной шине сопряжения вводно-выводное устройство, процессор «Intel Core i7» с частотой 2.8 ГГц, графический контроллер «NVIDIA GeForce GTX 1050 Ti» с блоком памяти не менее 4 Гб, оперативную память «DDR4» емкостью 4–16 Гб, внутреннюю перепрограммируемую память «SSD и HDD», емкостью 128 Гб и 2 Тб соответственно с встроенными программами обзора воздушного пространства и первичной обработки тепловизионных сигналов от НВОБ.
Встроенные в память ЭВМ 8 «SSD и HDD» программы содержат программу фильтрации НВОБ на фоне тепловых сигналов от облаков, птиц, насекомых и местных предметов, программу пороговой обработки с формированием зон детектирования и тревог по выбранным параметрам и с настройкой чувствительности ОТ, программу расчета угловых координат и угловой скорости движении НВОБ, программу траекторной обработки сигналов НВОБ и документирования работы ОТ.
По результатам сигнальной обработки сигналов НВОБ и командам управления обзором ЭВМ 6 соединена с соответствующими шинами ЭВМ 3 сопровождения НВОБ и управления (СУ) силовыми приводами ОПУ 2.1 управления телевизионной оптической системой (ТОС) 2. ТОС 2 включает установленные на указанном опорно-поворотном устройстве (ОПУ) 2.1 блок 2.1.1 оптических приёмников (ОП), оснащенных объективами с различными фокусными расстояниями, и лазерный дальномер (ЛД) 2.1.2. ОПУ 2.1 выполнено с возможностью кругового обзора воздушного пространства в азимутальной плоскости и секторного обзора в диапазоне углов места от –20° до +70°, а оптические оси объективов ОП 2.1.1 и ЛД 2.1.2 на ОПУ 2.1 ориентированы между собой параллельно. Блок 2.1.1 оптических приёмников (ОП) содержит первый 2.1.1.1 ОП1, второй 2.1.1.2 ОП2 и третий 2.1.1.3 ОП3 приемники, оснащенные фотоприемными матрицами и соответственно объективами с фокусным расстоянием 130, 490 и 1450 мм для одновременного обнаружения, автозахвата на сопровождение и идентификации типа НВОБ в ближней, средней и дальней зоне их обнаружения. Объективы каждого ОП 2.1.1.1–2.1.1.3 оснащены светозащитными козырьками и средствами обмыва их наружной оптики.
Выходы приемников 2.1.1.1 ОП1, 2.1.1.2 ОП2 и 2.1.1.3 ОП3 соединены с входами многоканального блока 4 модулей 4.1,..,4.3 автозахвата и идентификации (МАИ).
Каждый модуль 4.1–4.3 автозахвата и идентификации (МАИ) телевизионных изображений ВО выполнен в виде компьютера на базе операционной системы «Linux», универсальных конвейеров «CUDA», средств с аппаратной поддержкой библиотек «TensorRT» и содержит установленные на активной плате сопряжения вводно-выводное устройство «2Ч10 Gigabit Ethernet», процессор «Intel i5 8600K», графический контроллер «NVIDIA 2080 RTX, 8 Гб, 2944 ядра CUDA», оперативную память емкостью не менее 16 Гб, внутреннюю память «128 Гб SSD + 2 Тб HDD», снабженную базой эталонов телевизионных изображений типовых НВОБ и программами автоматического захвата на сопровождение и идентификации типа НВОБ по критерию совпадения принятых и эталонных видеоизображений.
Выходы блока 4 МАИ 4.1,..,4.3 по результатам предварительной обработки телевизионных изображений соединены с соответствующими сигнальными входами ЭВМ 3 сопровождения НВОБ и управления (СУ) силовыми приводами ОПУ 2.1.
ЭВМ 3 СУ выполнена на операционной системе «Linux» и содержит установленные на общей активной шине сопряжения вводно-выводное устройство «Ethernet» емкостью 2×10 Gigabit, цифровой дискриминатор управления ОПУ, процессор «Intel Xeon» с частотой 2,4 GHz, графический контроллер «NVIDIA GT 730», сетевую карту с производительностью не менее 10 Гб/с, оперативную память емкостью не менее 16 Гб и внутреннюю память «SSD» и/или «HDD» емкостью не менее 1000 Гб с встроенным блоком программ управления целеуказанием, распознаванием и измерением координат обнаруженных НВОБ.
Встроенный в ЭВМ 3 СУ блок программ включает программу автоматического управления и передачи команд ручного управления приводами ОПУ ОЭК, базу данных характеристик НВОБ, программу расчета дальности НВОБ через соотношение «размер изображения НВОБ/размер приемной матрицы ОП», программу расчета скорости движения НВОБ через соотношение «скорость движения НВОБ/скорость перемещения НВОБ на фотоприемной матрице», программу вторичной обработки тепловизионных и телевизионных данных о воздушной и наземной обстановке и формирование траекторной информации о НВОБ в секторе ответственности ОЭК.
По сигнальной информации и командам управления обзором, сопровождением и распознаванием НВОБ ЭВМ 3 соединена с автоматизированным рабочим местом (АРМ 5) оператора ОЭК.
АРМ 5 ОЭК включает соединенные интерфейсными линиями связи ЭВМ 5.1, панель 5.2 управления и блок 5.3 мониторов для отображения транспортной обстановки в зоне ответственности ОЭК.
ЭВМ 5.1 АРМ выполнена в виде моноблочного компьютера «Linux», содержащего материнскую плату «ITX, Intel QM57, 2ЧDDR3, VGA, DVI, HDMI, LVDS Ports, 2Ч10 Gbps RJ45, Audio», на которой установлены процессор «Intel Core i5» с частотой 2.4 GHz, оперативная память емкостью не менее 8 GB, блок параллельных и/или последовательных портов для подключения блока мониторов, а также - внутренняя «SSD + HDD» память, снабженная программами функционального контроля и управления работой ОЭК, выводом видеопотоков воздушной обстановки на экраны монитора и на радиомодем передачи данных внешнему потребителю данных о воздушной и наземной обстановке в зоне ответственности ОЭК.
Блок 5.3 мониторов АРМ 5 содержит монитор 5.3.1 отображения технической информации, монитор 5.3.2 отображения видеопотока тепловых сигналов НВОБ, монитор 5.3.3 отображения видеопотока телевизионных сигналов НВОБ, монитор 5.3.4 отображения трасс движения НВОБ.
Каждый монитор 5.3.1–5.3.4 содержит не менее одного жидкокристаллического LCD-монитора c панелью управления и размерами экрана не менее двадцати двух дюймов.
Пример отображения видеопотока тепловых сигналов НВОБ на мониторе 5.3.2 представлен на фиг. 2, пример видеопотока телевизионных сигналов НВОБ – на фиг. 3., пример вывода трассовой информации – на фиг. 4
Работа оптико-электронного комплекса (ОЭК)
Работа оптико-электронного комплекса (ОЭК) состоит в следующем. В процессе кругового вращения тепловизионной головки ОП 1 осуществляет панорамный (360°) или секторный обзор воздушного пространства. Темп обзора – переменный, 1 оборот за период от 1 до 10 секунд в поле углов места от 0 до 5° с последующим подъемом обзора на 5°. Регулярный обзор воздушного пространства производится в диапазоне углов места
«–20°,…,+90°».
Управление параметрами работы ОП 1 осуществляется с ЭВМ 5.1 АРМ оператора ОЭК через ЭВМ 6 тепловизионного канала. Видеопоток с ОТ 1 передается на ЭВМ 6 тепловизионного канала, откуда, после обработки, попадает на ЭВМ 3 (целеуказание), а затем на ЭВМ 5.1 АРМ оператора ОЭК с информацией о НВОБ (азимутальные координаты, угловая скорость). Обзорная тепловая обстановка (фиг.2) отображается на мониторе 5.3.2 АРМ 5 оператора. В автоматическом режиме ЭВМ 3 формирует управляющие команды для приводов ОПУ 2.1 или же оператор АРМ 5 оценивает важность НВОБ и соответствующим манипулятором панели 5.2 управления дает целеуказания на модуль сопровождения ЭВМ 3. Модуль управляет приводом ОПУ 2.1 телевизионных каналов ТОС 2 и обеспечивает сопровождение выбранных НВОБ. Телевизионные каналы ТОС 2 принимают оптическое изображение НВОБ и передают их на многоканальный блок 4 модулей автозахвата и идентификации (МАИ). При этом набор объективов ТОС 2 с разными фокусными расстояниями обеспечивает обнаружение, сопровождение и идентификацию типа НВОБ в широком спектре дальностей без «слепых зон». Модуль МАИ детектирует НВОБ в кадре изображения, идентифицирует тип НВОБ и определяет его госпринадлежность. Далее результаты первичной обработки телевизионных изображений НВОБ передаются на ЭВМ 3. ЭВМ 3 по известным методикам /3–6/ определяет пространственные характеристики сопровождаемых НВОБ, включая скорость, угловое их положение и дальность без выхода излучения в эфир. В исключительных случаях для калибровки пассивных каналов измерения дальности до НВОБ или уточнения дальности может включаться лазерный дальномер 2.1.2. Далее в процессе движения НВОБ в зоне ОЭК измеряются траекторные параметры потока НВОБ, отображаются на соответствующем мониторе АРМ 5 и параллельно передаются на радиомодем вышестоящего командного пункта.
Промышленная применимость.
Изобретение разработано на уровне опытного образца. Испытания показали, что предложенный ОЭК обеспечивает обнаружение, сопровождение и автоматическое распознавание НВОБ в широком спектре дальностей – от 100 м до 100 км. При этом дальность распознавания самолета Airbus A320 составляет 50 км, истребителя СУ-35 – 30 км, беспилотных летательных аппаратов (БПЛА) – 5 км. Что существенно превышает тактико-технические характеристики (ТТХ) прототипа /2/.
Источники информации
1. RU 2352480, 24.07.2007
2. RU 2530185, 10.10.2014
3. RU 2575471, 27.12.2015
4. RU 2016126124, 12.01.2018
5. RU 2014125295, 27.12.2015
6. RU 2603998, 10.12.2016.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| Оптико-пеленгационная система кругового обзора | 2020 |
|
RU2748872C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| Мобильный тепловизионный комплекс | 2022 |
|
RU2809472C1 |
| Способ оптико-электронного наблюдения охраняемой территории на основе предзаписи изображений с телевизионной камеры | 2020 |
|
RU2743319C1 |
| КОМПЛЕКС ОПТИЧЕСКОГО ВИДЕОНАБЛЮДЕНИЯ, ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТОВ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ ДЛЯ МОРСКИХ И РЕЧНЫХ СУДОВ | 2023 |
|
RU2816392C1 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
Изобретение относится к области пассивной локации. Оптико-электронный комплекс (ОЭК) включает обзорный тепловизор (ОТ) 1 для пассивного обнаружения наземных и воздушных объектов (НВОБ) и телевизионно-оптическую систему (ТОС) 2 для автозахвата на сопровождение и идентификации типа НВОБ. ОТ 1 выполнен с возможностью установки на выносной или выдвижной мачте и соединен по целеуказанию с телевизионно-оптической системой (ТОС) 2 через ЭВМ 6 ОТ и ЭВМ 3 СУ. ТОС 2 установлена на опорно-поворотном устройстве (ОПУ) 2.1 и содержит блок 2.1.1 оптических приёмников (ОП) и лазерный дальномер (ЛД) 2.1.2. Для оперативного и одновременного сопровождения и распознавания НВОБ в дальней, средней и ближней зоне их обнаружения ОП оснащены объективами с соответствующими различными фокусными расстояниями. ОТ 1 соединен через ЭВМ 6 управления обзором и обработкой тепловизионных сигналов с ЭВМ 3 сопровождения и управления (ЭВМ СУ), вторые входы которой через многоканальный блок 4 модулей автозахвата и идентификации (МАИ) телевизионных видеоизображений (ТИЗ) соединены с выходами ТОС 2. ЭВМ 3 СУ соединена силовыми приводами ОПУ 2.1 и с автоматизированным рабочим местом (АРМ) 5 оператора ОЭК. Изобретение позволяет одновременно и независимо друг от друга сканировать зону ответственности ОЭК, автоматически сопровождать и идентифицировать типы НВОБ. Следствием этих технических преимуществ является повышение производительности ОЭК и расширение его функциональных возможностей. 13 з.п. ф-лы, 4 ил.
1. Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов, включающий обзорный тепловизор (ОТ) для пассивного обнаружения наземных и воздушных объектов (НВОБ) и телевизионно-оптическую систему (ТОС) для точного измерения дальности, координат и идентификации типа НВОБ, установленную на опорно-поворотном устройстве (ОПУ) и связанную интерфейсными линиями связи через электронную вычислительную машину (ЭВМ) сопровождения НВОБ и управления (СУ) силовыми приводами ОПУ с автоматизированным рабочим местом (АРМ) оптико-электронного комплекса (ОЭК), АРМ ОЭК включает соединенные интерфейсными линиями связи ЭВМ панель управления и блок мониторов для отображения воздушной и наземной обстановки в зоне ответственности ОЭК, отличающийся тем, что ОЭК дополнительно содержит ЭВМ управления обзором и обработкой тепловизионных сигналов ОТ, многоканальный блок модулей автозахвата и идентификации (МАИ) НВОБ, при этом обзорный тепловизор (ОТ) выполнен с возможностью установки на выносной или выдвижной мачте и соединен по целеуказанию с телевизионно-оптической системой (ТОС) через ЭВМ ОТ и ЭВМ СУ, сигнальные входы ЭВМ СУ по результатам первичной обработки телевизионных видеоизображений НВОБ соединены с выходами блока МАИ, сигнальные входы которых по телевизионному видеоизображению НВОБ соединены с сигнальными выходами, включающей блок оптических приёмников (ОП), оснащенных объективами с различными фокусными расстояниями, и лазерный дальномер (ЛД), соединенный по сигналам измерения дальности до НВОБ с АРМ ОЭК через ЭВМ СУ.
2. Оптико-электронный комплекс по п. 1, отличающийся тем, что блок ОП и ЛД установлены на общем ОПУ, выполненном с возможностью кругового обзора воздушного и наземного пространства в азимутальной плоскости и секторного обзора в диапазоне углов места от –20° до +90°, а оптические оси объективов ОП и ЛД ориентированы между собой параллельно.
3. Оптико-электронный комплекс по п. 2, отличающийся тем, что блок оптических приёмников (ОП) содержит первый ОП1, второй ОП2 и третий ОП3 приемники, оснащенные фотоприемными матрицами и соответственно объективами с фокусным расстоянием 130, 490 и 1450 мм для обеспечения автосопровождения и идентификации типа НВОБ в ближней, средней и дальней зоне их обнаружения.
4. Оптико-электронный комплекс по п. 3, отличающийся тем, что объективы каждого ОП оснащены светозащитными козырьками и средствами обмыва их наружной оптики.
5. Оптико-электронный комплекс по п. 1, отличающийся тем, что обзорный тепловизор (ОТ) содержит тепловизионную головку (ТГ) с индивидуальным силовым приводом и индивидуальным ОПУ, выполненную с возможностью кругового обзора воздушного и наземного пространства в азимутальной плоскости и секторного обзора – в диапазоне углов места от –20° до +70° и снабженную механическими замками крепления на выносной или выдвижной мачте.
6. Оптико-электронный комплекс по п. 5, отличающийся тем, что объектив ТГ оснащен светозащитным козырьком и средствами обмыва.
7. Оптико-электронный комплекс по п. 1, отличающийся тем, что ЭВМ ОТ выполнена на операционной системе «Linux» и содержит установленные на общей активной шине сопряжения вводно-выводное устройство, процессор «Intel Core i7» с частотой 2.8 ГГц, графический контроллер «NVIDIA GeForce GTX 1050 Ti» с блоком памяти не менее 4 Гб, оперативную память «DDR4» емкостью 4–16 Гб, внутреннюю перепрограммируемую память «SSD и HDD», емкостью 128 Гб и 2 Тб соответственно с встроенными программами обзора воздушного пространства и первичной обработки тепловизионных сигналов от НВОБ.
8. Оптико-электронный комплекс по п. 7, отличающийся тем, что встроенные в память «SSD и HDD» программы содержат программу фильтрации НВОБ на фоне тепловых сигналов от облаков, птиц, насекомых и местных предметов, программу пороговой обработки с формированием зон детектирования и тревог по выбранным параметрам и с настройкой чувствительности ОТ, программу расчета угловых координат и угловой скорости движения НВОБ, программу траекторной обработки сигналов и документирования работы ОТ.
9. Оптико-электронный комплекс по п. 1, отличающийся тем, что ЭВМ СУ выполнена на операционной системе «Linux» и содержит установленные на общей активной шине сопряжения вводно-выводное устройство «Ethernet» емкостью 2×10 Gigabit, цифровой дискриминатор управления ОПУ, процессор «Intel Xeon» с частотой 2,4 GHz, графический контроллер «NVIDIA GT 730», сетевую карту с производительностью не менее 10 Гб/с, оперативную память емкостью не менее 16 Гб и внутреннюю память «SSD» и/или «HDD» емкостью не менее 1000 Гб с встроенным блоком программ управления целеуказанием, распознаванием и измерением координат обнаруженных НВОБ.
10. Оптико-электронный комплекс по п. 9, отличающийся тем, что встроенный в ЭВМ СУ блок программ включает программу автоматического управления и передачи команд ручного управления приводами ОПУ ОЭК, базу данных характеристик типовых НВОБ, программу расчета дальности НВОБ через соотношение «размер изображения НВОБ/размер приемной матрицы ОП», программу расчета скорости движения НВОБ через соотношение «скорость движения НВОБ/скорость перемещения НВОБ на фотоприемной матрице», программу идентификации НВОБ на основе совпадения принятых и эталонных видеоизображений НВОБ, программу вторичной обработки тепловизионных и телевизионных данных о воздушной и наземной обстановке и формирование траекторной информации о НВОБ в секторе ответственности ОЭК.
11. Оптико-электронный комплекс по п. 1, отличающийся тем, что каждый модуль автозахвата и идентификации (МАИ) НВОБ выполнен в виде компьютера на базе операционной системы «Linux», универсальных конвейеров «CUDA», средств аппаратной поддержки библиотек «TensorRT» и содержит установленные на активной плате сопряжения вводно-выводное устройство «2×10 Gigabit Ethernet», процессор «Intel i5 8600K», графический контроллер «NVIDIA 2080 RTX, 8 Гб, 2944 ядра CUDA», оперативную память емкостью не менее 16 Гб, внутреннюю память «128 Гб SSD + 2 Тб HDD», снабженную базой эталонов телевизионных изображений типовых НВОБ и программами автозахвата и идентификации типа НВОБ по критерию совпадения принятых и эталонных видеоизображений.
12. Оптико-электронный комплекс по п. 1, отличающийся тем, что ЭВМ АРМ выполнена в виде моноблочного компьютера «Linux», содержащего материнскую плату «ITX, Intel QM57, 2×DDR3, VGA, DVI, HDMI, LVDS Ports, 2×10 Gbps RJ45, Audio», на которой установлены процессор «Intel Core i5» с частотой 2.4 GHz, оперативная память емкостью не менее 8 GB, блок параллельных и/или последовательных портов для подключения блока мониторов, а также – внутренняя «SSD + HDD» память, снабженная программами функционального контроля и управления работой ОЭК, выводом видеопотоков воздушной обстановки на экраны монитора и на радиомодем передачи данных внешнему потребителю транспортной обстановки в зоне ответственности ОЭК.
13. Оптико-электронный комплекс по п. 1, отличающийся тем, что блок мониторов содержит монитор отображения технической информации, монитор отображения видеопотока сигналов о НВОБ, монитор отображения видеопотока телевизионных сигналов о НВОБ, монитор отображения трасс движения НВОБ.
14. Оптико-электронный комплекс по п. 13, отличающийся тем, что каждый монитор содержит не менее одного жидкокристаллического LCD-монитора с панелью управления и размерами экрана не менее двадцати двух дюймов.
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2013 |
|
RU2530185C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| Способ кулонометрического анализа металлов по осаждению | 1960 |
|
SU136590A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2007 |
|
RU2361235C1 |
| Устройство для передачи на расстояние показаний измерительных приборов | 1947 |
|
SU88814A1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2011 |
|
RU2464601C1 |
| НАДРОТОРНОЕ УСТРОЙСТВО ТУРБОМАШИНЫ | 2000 |
|
RU2192564C2 |

