Изобретение относится к горной промышленности и может быть использовано преимущественно для загрузки горной массы в автосамосвалы при осуществлении непрерывной работы карьерных комбайнов.
Известно устройство для непрерывной загрузки железнодорожных полувагонов горной массой при работе с выемочной машиной непрерывного действия, включающее раму, на которой смонтированы поворотная воронка с раздаточным рукавом и распределитель потока материалов. При эксплуатации устройство подвешивается на отвальный конвейер, например, роторного экскаватора [1].
Данное устройство имеет функциональные ограничения для работы с карьерными комбайнами и не может быть использовано для работы с ними.
Известен самоходный бункер-дозатор для загрузки самосвалов [2]. Самоходный бункер-дозатор включает портал с ходовыми тележками, на котором установлены бункерные емкости с затворами, загрузочное устройство, выполненное в виде воронки. Материал в бункеры поступает через приемную воронку и открытый затвор. При заполнении бункерной емкости до заданного уровня срабатывает датчик, и поток материала направляется на заполнение второго бункера.
Самоходный бункер имеет большое число передаточных механизмов, ограничивающих надежность непрерывной работы конструкции.
Известны загрузочное устройство для загрузки автомобиля-самосвала и комплекс для погрузки автосамосвалов [3-4]. Загрузочное устройство [3] содержит раму, установленный на нее бункер, затвор с подвижными пластинами и привод для его закрытия и открытия. Открытие затвора осуществляется воздействием кузовом автосамосвала на кронштейн затвора, при движении автосамосвала назад, при этом кузов заполняется горной массой. После заполнения кузова автосамосвал выезжает вперед из-под загрузочного устройства и затвор автоматически закрывается. Загрузочное устройство несамоходное и перемещается с места на место на салазках.
Наиболее близким по технической сущности является комплекс для погрузки автосамосвалов [4], в котором задействованы два одинаковых загрузочных модуля с возможностью их перестановки и подачи в них горной массы посредством экскаватора. Бункеры установлены на рамах, вместимость которых соответствует грузоподъемности используемых автосамосвалов.
Данный комплекс для погрузки автосамосвалов не способен выполнить задачу погрузки горной массы при непрерывной работе комбайна из-за конструктивных (отсутствие привода перемещения у модулей комплекса) и функциональных (автоматическое непрерывное следование за выемочной машиной) особенностей комплекса, в том числе позиционирования бункеров относительно загрузочного устройства комбайна. Для наполнения бункера загрузочного устройства потребуется увеличение длины штатных конвейеров карьерных комбайнов, что приведет к увеличению массы, габаритов и стоимости комбайнов [5]. При повороте консоли конвейера от одного загрузочного модуля к другому необходимо будет останавливать комбайн, следовательно, появятся простои и снизится производительность.
Технический результат заключается в улучшении технологической эффективности работы комплекса, осуществляющего в автоматическом режиме совмещение процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием другого бункера под загрузку с конвейера карьерного комбайна в процессе рабочего хода карьерного комбайна с обеспечением бесперебойного, без простоев функционирования карьерного комбайна. Оба бункера располагаются в одном модуле, при последовательной загрузке конвейером карьерного комбайна бункеры опущены вниз и высота их верхней кромки обеспечивает возможность загрузки конвейером. При последовательной разгрузке бункеры с помощью гидромеханизмов поднимаются, поворачиваются и продольно перемещаются, обеспечивая равномерную загрузку кузова автосамосвала.
Технический результат достигается тем, что в способе загрузки горной массы в автосамосвалы, включающем возможность передвижения модулей с бункерами и подачу горной массы в бункеры с вместимостью, соответствующей грузоподъемности используемых самосвалов, осуществление независимых процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием другого бункера под загрузку, осуществление независимых процессов позиционирования бункеров происходит одновременно с рабочим процессом карьерного комбайна при автоматизации процесса ориентации комплекса для осуществления погрузки относительно карьерного комбайна, а автосамосвала - относительно комплекса для осуществления погрузки, при этом реализация независимых процессов позиционирования бункеров происходит посредством перемещения рам бункеров в вертикальной плоскости и кареток бункеров - в горизонтальной плоскости и управляется посредством механизмов вертикального перемещения и механизмов горизонтального перемещения, при этом бункеры посредством шарнирных связей с каретками имеют возможность поворота в вертикальной плоскости с помощью телескопических механизмов поворота, а рамы бункеров при перемещении входят во взаимодействие посредством опор скольжения с вертикальными направляющими.
Комплекс для осуществления погрузки, содержащий расположенные в забое модули с возможностью их передвижения и подачи горной массы в установленные на рамах бункеры с вместимостью, соответствующей грузоподъемности используемых самосвалов, и включающий обеспечение независимых процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием другого бункера под загрузку, снабжен вертикальными направляющими рамы модулей, во взаимодействие с которыми входят опоры скольжения рам бункеров, механизмами вертикального перемещения, связанными с опорами скольжения, механизмами горизонтального перемещения, установленными на рамах бункеров и связанными с каретками бункеров для позиционирования бункеров в горизонтальной плоскости, и телескопическими механизмами поворота бункеров в вертикальной плоскости относительно шарнирных связей, системой автоматического управления механизмами функционирования комплекса, при этом для автоматизации процесса ориентации комплекса относительно карьерного комбайна и относительно автосамосвала в процессе перемещения при работе карьерного комбайна комплекс снабжен датчиками позиционирования, установленными на раме комплекса и связанными с системой автоматического управления, а для контроля загрузки бункеров горной массой на днищах бункеров размещены датчики контроля, при этом система автоматического управления содержит микропроцессор с блоком управления, панель управления гидросистемой и электрогенератор.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Комплекс для осуществления погрузки изображен на чертежах.
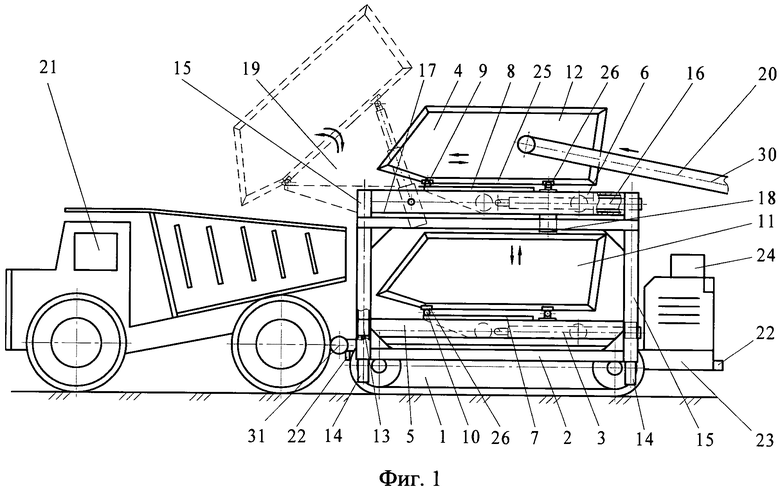
На фиг.1 - общий вид комплекса для осуществления погрузки, где передний бункер изображен в начальном, нижнем положении для загрузки горной массы конвейером, а задний бункер находится в поднятом положении после загрузки конвейером (не в начальном) для более точного указания позиций, относящихся к нему; на фиг.2 - вид сверху на фиг.1.
Комплекс 1 для осуществления погрузки содержит одну общую раму модулей 2 для обоих модулей 3, 4. Модули 3, 4 содержат рамы бункеров 5, 6, на которых установлены каретки 7, 8. Каретки 7, 8 с помощью шарнирных связей 9, 10 соединены с бункерами 11, 12 с вместимостью, соответствующей грузоподъемности используемых самосвалов. Опоры скольжения 13 рам бункеров 5, 6 связаны с механизмами вертикального перемещения 14 и входят во взаимодействие с вертикальными направляющими 15 рамы модулей 2. Механизмы горизонтального перемещения 16 установлены на рамах бункеров 5, 6 и связаны с каретками 7, 8 для позиционирования бункеров 11, 12 в горизонтальной плоскости 17. На рамах бункеров 5, 6 закреплены телескопические механизмы поворота 18 бункеров 11, 12 в вертикальной плоскости 19 относительно шарнирных связей 9, 10. Для автоматизации процесса ориентации комплекса 1 относительно карьерного комбайна 20 и относительно автосамосвала 21 в процессе перемещения при работе карьерного комбайна 20 комплекс 1 снабжен датчиками позиционирования 22, установленными на раме 23 комплекса 1 и связанными с системой автоматического управления 24 механизмами функционирования комплекса 1. Для контроля загрузки бункеров 11, 12 горной массой на днищах 25 бункеров 11, 12 размещены датчики контроля 26. Система автоматического управления 24 содержит микропроцессор с блоком управления 27, панель управления гидросистемой 28 и электрогенератор 29. Горная масса подается в бункеры 11, 12 конвейером 30. Комплекс 1 снабжен буфером 31.
Способ загрузки горной массы в автосамосвалы реализуется следующим образом.
Карьерный комбайн 20, перемещаясь вдоль забоя, разрушает горную породу и по конвейеру 30 подает горную массу в бункер 11 комплекса 1, который находится в нижнем положении. В начальном положении оба бункера 11, 12 находятся в нижнем положении. При полной загрузке бункера 11 срабатывают датчики 26, расположенные на днище 25, на отключение загрузки. Осуществление независимых процессов позиционирования бункеров 11, 12 происходит одновременно с рабочим процессом карьерного комбайна 20 при автоматизации процесса ориентации комплекса 1 для осуществления погрузки горной массы, полученной с помощью карьерного комбайна 20, и автосамосвала 21 - относительно комплекса 1. Комплекс 1 следует за карьерным комбайном 20, дистанционно управляемым из него через систему автоматического управления 24, содержащую микропроцессор с блоком управления 27, панель управления гидросистемой 28 и электрогенератор 29. В это время автосамосвал 21, двигаясь задним ходом, упирается в буфер 31 комплекса 1, срабатывает датчик 22, расположенный на раме 23, подается команда на погрузку горной массы в автосамосвал 21. В это время конвейер 30 карьерного комбайна 20, загрузив бункер 11, перемещается для позиционирования над бункером 12 модуля 4, который находится в крайнем нижнем положении. Происходит загрузка бункера 12. В это время модуль 3, включающий раму бункера 5 и бункер 11, с помощью опор скольжения 13, которые входят во взаимодействие с вертикальными направляющими 15 рамы модулей 2, перемещается в вертикальной плоскости механизмами вертикального перемещения 14. Когда рама бункера 5 модуля 3 достигнет своего крайнего верхнего положения, каретка 7 бункера 11 с помощью механизма горизонтального перемещения 16 сдвигается в сторону автосамосвала 21 для позиционирования бункера 11 в горизонтальной плоскости 17 на нужном расстоянии от автосамосвала 21 и посредством шарнирной связи 10 с кареткой 7 и телескопического механизма поворота 18 поворачивается в вертикальной плоскости 19 для загрузки автосамосвала 21. Автосамосвал 21 загружается. Затем бункер 11 перемещается в исходное нижнее положение. После загрузки бункера 12 конвейер 30 позиционируется над бункером 11, а модуль 4, включающий раму бункера 6, с помощью опор скольжения 13, которые входят во взаимодействие с вертикальными направляющими 15 рамы модулей 2, перемещается в вертикальной плоскости механизмами вертикального перемещения 14. Когда рама бункера 6 модуля 4 достигнет своего крайнего верхнего положения, каретка 8 бункера 12 с помощью механизма горизонтального перемещения 16 сдвигается в сторону автосамосвала 21 для позиционирования бункера 12 в горизонтальной плоскости 17 на нужном расстоянии от автосамосвала 21 и посредством шарнирной связи 9 с кареткой 8 и телескопического механизма поворота 18 поворачивается в вертикальной плоскости 19 для загрузки следующего автосамосвала 21.
Предложенный способ загрузки горной массы в автосамосвалы через комплекс для осуществления погрузки позволяет обеспечить непрерывность работы карьерного комбайна и перегрузки горной массы. Кинематическая схема перемещения бункеров позволяет производить их загрузку в нижнем положении имеющимися на карьерных комбайнах конвейерами и безударно и равномерно производить загрузку автосамосвалов.
Источники информации
1. Авторское свидетельство СССР №549393 от 05.03.1977. Устройство для непрерывной загрузки железнодорожных полувагонов.
2. Авторское свидетельство СССР №625993 от 30.09.1978. Самоходный бункер-дозатор для загрузки самосвалов.
3. Патент РФ №2257330 от 27.07.2005. Загрузочное устройство для загрузки автомобиля-самосвала.
4. Патент РФ №2272144 от 20.03.2006. Комплекс для погрузки автосамосвалов.
5. Пихлер М., Панкевич Ю.Б. Некоторые технологические особенности работы комбайнов Wirtgen Surface Miner на открытых разработках // Горная промышленность. - 2005. - №1. - С.36-39.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИФФЕРЕНЦИРОВАННОЙ АВТОМАТИЗИРОВАННОЙ ЗАГРУЗКИ ГОРНОЙ МАССЫ В АВТОСАМОСВАЛЫ ПРИ НЕПРЕРЫВНОЙ РАБОТЕ ВЫЕМОЧНОГО АГРЕГАТА И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2595115C1 |
| СПОСОБ ПОДГОТОВКИ И ТРАНСПОРТИРОВКИ ГОРНОЙ МАССЫ ПРИ РАЗРАБОТКЕ ГЛУБОКОЗАЛЕГАЮЩИХ МЕСТОРОЖДЕНИЙ И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569136C1 |
| Способ погрузки породы в транспорт драглайном (варианты) | 2022 |
|
RU2798631C1 |
| Способ комбинированной разработки месторождений твердых полезных ископаемых | 2017 |
|
RU2653213C1 |
| КОМПЛЕКС ДЛЯ ПОГРУЗКИ АВТОСАМОСВАЛОВ | 2004 |
|
RU2272144C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ КАРЬЕРНЫХ АВТОМОБИЛЕЙ-САМОСВАЛОВ | 2005 |
|
RU2293052C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ КАРЬЕРНЫХ АВТОСАМОСВАЛОВ | 2004 |
|
RU2270160C1 |
| Способ районирования экскаваторных забоев для управления работой экскаваторно-автомобильных комплексов | 2020 |
|
RU2738919C1 |
| Способ открытой разработки месторождения полезных ископаемых с применением фрезерных комбайнов | 2022 |
|
RU2790308C1 |
| Способ разработки месторождений полезных ископаемых с применением погрузочной машины, обеспечивающей поточную загрузку в транспортное средство | 2016 |
|
RU2660688C2 |

Изобретение относится к горной промышленности и может быть использовано преимущественно для загрузки горной массы в автосамосвалы при осуществлении непрерывной работы карьерных комбайнов. Техническим результатом является улучшение технологической эффективности работы комплекса для осуществления погрузки горной массы в автосамосвалы. Способ включает осуществление независимых процессов позиционирования бункеров, которое происходит одновременно с рабочим процессом карьерного комбайна при автоматизации процесса ориентации комплекса для осуществления погрузки относительно карьерного комбайна, а автосамосвала - относительно комплекса. Реализация независимых процессов позиционирования бункеров происходит посредством перемещения рам бункеров в вертикальной плоскости и кареток бункеров - в горизонтальной плоскости и управляется посредством механизмов вертикального перемещения и механизмов горизонтального перемещения. При этом бункеры посредством шарнирных связей с каретками имеют возможность поворота в вертикальной плоскости с помощью телескопических механизмов поворота. Рамы бункеров при перемещении входят во взаимодействие посредством опор скольжения с вертикальными направляющими. Комплекс снабжен вертикальными направляющими рамы модулей, во взаимодействие с которыми входят опоры скольжения рам бункеров, механизмами вертикального перемещения, связанными с опорами скольжения, механизмами горизонтального перемещения, установленными на рамах бункеров и связанными с каретками бункеров для позиционирования бункеров в горизонтальной плоскости, и телескопическими механизмами поворота бункеров в вертикальной плоскости относительно шарнирных связей, системой автоматического управления механизмами функционирования комплекса. Также комплекс снабжен датчиками позиционирования, установленными на раме комплекса и связанными с системой автоматического управления, а для контроля загрузки бункеров горной массой на днищах бункеров размещены датчики контроля. При этом система автоматического управления содержит микропроцессор с блоком управления, панель управления гидросистемой и электрогенератор. 2 н.п. ф-лы, 2 ил.
1. Способ загрузки горной массы в автосамосвалы, включающий возможность передвижения модулей с бункерами и подачу горной массы в бункеры с вместимостью, соответствующей грузоподъемности используемых самосвалов, осуществление независимых процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием другого бункера под загрузку, отличающийся тем, что осуществление независимых процессов позиционирования бункеров происходит одновременно с рабочим процессом карьерного комбайна при автоматизации процесса ориентации комплекса для осуществления погрузки относительно карьерного комбайна, а автосамосвала - относительно комплекса для осуществления погрузки, при этом реализация независимых процессов позиционирования бункеров происходит посредством перемещения рам бункеров в вертикальной плоскости и кареток бункеров - в горизонтальной плоскости и управляется посредством механизмов вертикального перемещения и механизмов горизонтального перемещения, при этом бункеры посредством шарнирных связей с каретками имеют возможность поворота в вертикальной плоскости с помощью телескопических механизмов поворота, а рамы бункеров при перемещении входят во взаимодействие посредством опор скольжения с вертикальными направляющими.
2. Комплекс для осуществления погрузки, содержащий расположенные в забое модули с возможностью их передвижения и подачи горной массы в установленные на рамах бункеры с вместимостью, соответствующей грузоподъемности используемых самосвалов, и включающий обеспечение независимых процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием другого бункера под загрузку, отличающийся тем, что снабжен вертикальными направляющими рамы модулей, во взаимодействие с которыми входят опоры скольжения рам бункеров, механизмами вертикального перемещения, связанными с опорами скольжения, механизмами горизонтального перемещения, установленными на рамах бункеров и связанными с каретками бункеров для позиционирования бункеров в горизонтальной плоскости, и телескопическими механизмами поворота бункеров в вертикальной плоскости относительно шарнирных связей, системой автоматического управления механизмами функционирования комплекса, при этом для автоматизации процесса ориентации комплекса относительно карьерного комбайна и относительно автосамосвала в процессе перемещения при работе карьерного комбайна комплекс снабжен датчиками позиционирования, установленными на раме комплекса и связанными с системой автоматического управления, а для контроля загрузки бункеров горной массой на днищах бункеров размещены датчики контроля, при этом система автоматического управления содержит микропроцессор с блоком управления, панель управления гидросистемой и электрогенератор.
| КОМПЛЕКС ДЛЯ ПОГРУЗКИ АВТОСАМОСВАЛОВ | 2004 |
|
RU2272144C1 |
| САМОХОДНЫЙ БУНКЕР-ПИТАТЕЛЬ ДЛЯ rOPHblX РАБОТОТКРЫТЫХ | 0 |
|
SU256704A1 |
| Транспортно-укладочная машина | 1990 |
|
SU1735478A1 |
| Транспортное средство для приготовления и перевозки строительной смеси | 1989 |
|
SU1726294A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УСТРОЙСТВАМИ САМОЗАГРУЗКИ И САМОРАЗГРУЗКИ | 1990 |
|
RU2031016C1 |
| US 3666119 A1, 30.05.1972 | |||

