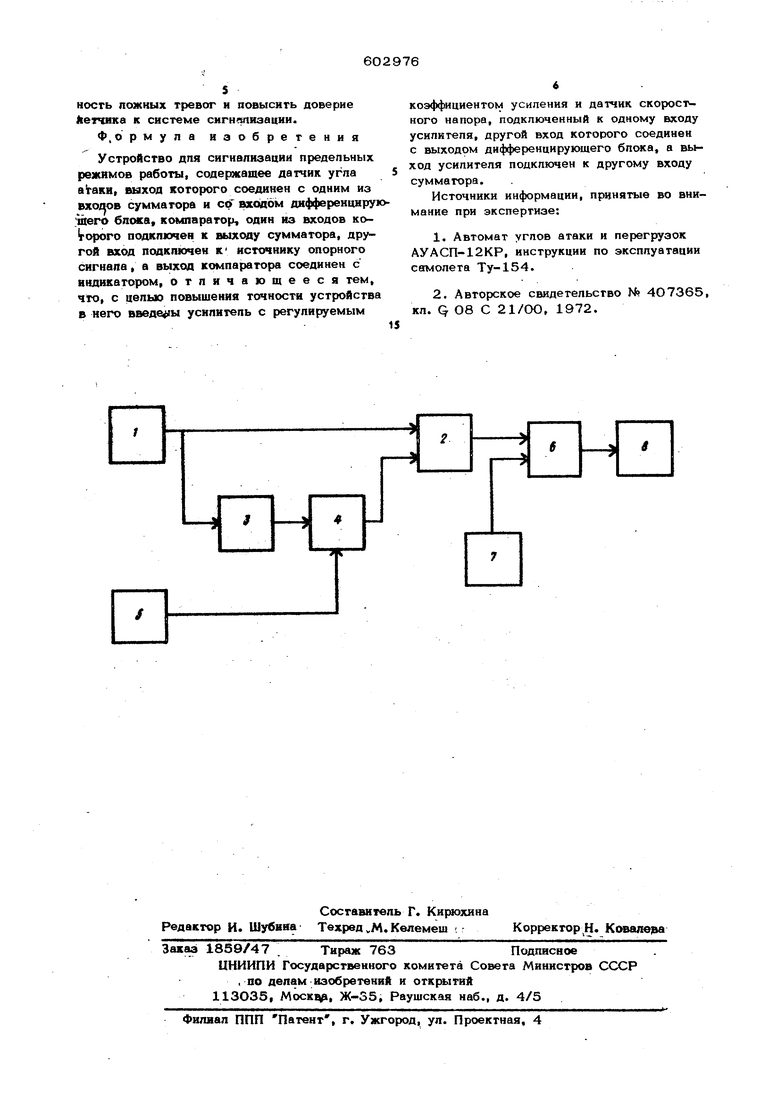
Изобретение относится к бортовым сй-ртемам автоматического управления и контроля и может быть испопьаовано для повышения безопасности полетов. Предельные режимы работы самопета могут наступить веледствие превышения предельно допустимых знячений углов атаки, крена, скольжения, перегрузки. Так, например, сваливание самолета может быть вызвано выходом самопета на предельные угпы атаки, соответствующие нредеяьно допустимым значениям коэффвцйеита подъемной сипы С дйНИзвестно устройство сигнализации предеп ных режимов работы, п редназначеннов для определения и сопостав 1ен1Ш в полете в каждый момент времени значений текущего и критического ofj,pyrnQB атаки, а также для определения в каждый момент времени значе НИИ текущей вертикальной перегрузки Ну и сопоставление ее со значениями допустимой вертикальной перегрузки К у АО E--I Однако это устройство не учитывает скорости приближения параметра к своему предельно допустимому значению, соответствующему предельному режиму попета. Наиболее близким по технической сущности к предлагаемому изобретению является устройство для сигнализации предельных ре жимов работы, содержащее датчик угла атаки, выход которого соединен с одним из вхо. лов сумматора и со входом дифференцирующего блока, компаратор, один из входов которого подключен к Ви1ходу сумматора, другой вход подключен к источнику опорного сигнала, а выход компаратора соединен с индика тором 2. Данное устройство так же не учитывает скорости приближения параметра к своему предельно допустимому значению и не учитывает необходимое резервное время. Величина необходимого резервного времени складывается из времени реакции летчика на сигнализацию и времени реакции самолета на соответствующее управляющее воздействие. Время реакции летчика в ситуациях, связанных с ограничением предельных режимов работы ( при отсутствии процесса принятия решения) , доходит до 1с. Время реакции петатепьного аппарата за висит от величины управляющих воздействий , успоЕИй попета, и составляет нескопько -секунд. При одинаковых управляющих воздействиях оно определяется вепичиной момента, сипы, возникающего при огкпонени органов управпения, который пропорционапе величине скорости напора. В результате этого, приблизительно во столько же раз изменяется время реакции самолета при изменении величины скоростного напора от минимального до максималь ного значения. В связи с этим устройство, не учитываю щее зависимость резервного времени от ве- личины скоростного напора, не может с доо таточной точностью сигнализировать и приближении предельного режима работы на всех этапах попета. иепью изобретения является повышение точности устройства путем сигнализации предельных режимов работы с учетом изменения необходимого резервного времени на различных этапах попета. ,. Это достигается тем, что в предлагаемо устройство введены усилитель с регулируемым коэффициентом усиления и датчик скоростного напора подключенный к одному вх ду усилителя, другой вход которого соединен с выходом дифференцирующего блока, а выход усилителя подключен к другому входу сумматора. В устройстве вырабатывается комбинированный сигнал, соответствующий прогнози руемому на резервное время значению угпа атаки, и сигнал, соответствующий предель- ному значению угла атаки; сигнал на выход устройства появляется, когда комбинирован ный сигнал становится равным или превышает сигнал, соответствующий предельному значению угла атаки. Прогнозируемое значение угла атаки определяется как сумма текущего угпа атаки и текущей скорости изменения угла атаки, умноженной на величину резервного времени: ОС проги тех pea 4. Величина резервного времени задается величиной коэффициента усиления усилителя и представляет собой сумму постоянного члена TQ и переменного члена, равного произведению величины скоростного напора на постоянный коэффициент К. Т Т + Ко pies «о Сигнал, соответствующий величине скоростного напора о , поступает с датчика скоростного напора, входящего в комплект датчиков летательного аппарата. Величина TQ представляет собой начальное значение регулируемого коэффициента усиления усили теля, а величина К - яувствиегльность усилителя по отнощению ко входу регулирования коэффициента усиления. Эти величины устанавливаются из соображений обеспечивания своевременной сигнализации о приближении к предельному режиму работы при изменении величины скоростного напора в процессе полета от минимального до максимального значения. На чертеже приведена блок-схема устройства сигнализаций предельных режимов работы. Устройство содержит датчик 1 углов атаки, вход которого соединен с одним из входов сумматора 2 и со входом дифференцирующего блока 3, и усилитель 4 с регулируемым коэффициентом усиления, вход которого соединен с выходом дифференцирующего блока 3, вход регулирования коэффициента усилейия - с выходом датчика 5 скоростного напора, а выход- со вторым входом сумматора . 2, компаратор 6, первый вход которого соединен с выходом сумматора 2, второй - с источником опорного сигнала 7, а выход - с индикатором 8. Сигнал с датчика 1 поступает на сумма тор 2 и через дифференцирующий блок 3 на усилитель 4 с регулируемым коэффициентом усиления. Одновременно сигнал с дат чика 5 скоростного напора поступает на вход регулирования коэффициента усипеиия усилителя 4,и устанавливает величину коэффи циента усиления усилителя 4, осуществляет умножение сигнала с дифференцирующего блока 3 на коэффициент усиления, пропорциональный необходимому резервному времени. Сумматор 2 производит вычисление прог-г нозируемого угпа- атаки, равного сумме текущего угла атаки .и текущей скорости изменения угла атаки, умноженной на величину резервного времени. Сигнал с выхода сумматора 2 поступает на компаратор 6, где сравнивается с сигналом от источника опорного сигнала 7, соответствуклцим критическому значению угпа атаки. Когда нр1МНозируемый угол атаки становится равным япя превыщает критический угол атаки, индикатор 8 выдает сигнал, предупреждающий перчика о приближении к предельному режиму работы. Повышение точности сигнализации и приближении аэродинамических параметров к дельным значениям за счет учета зависимос-г ги резервного времени от величины скоростного напора является необходимым, так как это позволяет своевременно предотвратить опасные ситуации, возникающие при выходе параметров за свои предельные значения : .йливанйе, раэрущение), снизить вероятносгь ложных тревог и повысить доверие Летчика к системе сигнализации. Ф.ормупа изобретения Устройство для сигиапизации предельных режимов работы, соде якашее датчик угла атаки, выход которого соединен с одним из входов сумматора и со входом диффереициру Шего блока, компаратор, один из входов которого подключен к выходу сумматора, другой вход подключен к источнику опорного сигнала, а выход компаратора соединен с индикатором, отличающееся тем, что, с целью повышения точности устройств в него введев ы усилитель с регулируемым коэффициентом усиления и датчик скоростного напора, подключенный к одному входу усипигепя, другой вход которого соединен с выходом дифференцирующего блока, а выход усилителя подключен к другому входу сумматора. Источники информации, принятые во внимание при экспертизе: 1.Автомат углов атаки и перегрузок АУАСП-12КР, инструкции по эксплуатации самопега Ту-154. 2.Авторское свидетельство Н 4О7365, кл. Q О8 С 21/ОО, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА АТАКИ САМОЛЕТА | 2005 |
|
RU2281882C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ САМОЛЕТА | 1988 |
|
RU2041136C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ПИЛОТАЖНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
RU2043945C1 |
