Изобретение относится к цифровому измерительному входу для электрического устройства автоматизации с приемным устройством, которое предназначено для приема цифровых входных измеренных значений, которые генерируются путем дискретизации аналогового измеренного сигнала с первой частотой дискретизации, и с устройством преобразования сигналов, которое выполнено таким образом, чтобы из цифровых входных измеренных значений формировать и предоставлять цифровые выходные измеренные значения, причем цифровые выходные измеренные значения в отношении их частоты дискретизации и/или их соответствующего момента времени дискретизации согласованы с заданной частотой дискретизации и/или заданными моментами времени дискретизации. Кроме того, изобретение также относится к устройству автоматизации с таким цифровым измерительным входом и способу обработки цифровых входных измеренных значений.
Электрические устройства автоматизации используются, например, для управления, контроля и защиты электрических сетей энергоснабжения. Обычно, устройства автоматизации размещены по возможности вблизи места измерения и принимают посредством предусмотренных в месте измерения датчиков, например, преобразователей тока и/или напряжения, аналоговые измеренные сигналы, которые затем дополнительно обрабатываются в устройстве автоматизации. Существенным этапом при дальнейшей обработке является преобразование аналогового измеренного сигнала в цифровые дискретные значения, которые описывают профиль аналогового сигнала. С применением этих цифровых дискретных значений, в устройстве автоматизации могут затем выполняться функции управления, контроля и защиты. Если устройство автоматизации не может быть расположено вблизи всех датчиков, то аналоговые измеренные сигналы через соответствующие измерительные линии передаются на устройство автоматизации.
В последнее время прилагаются усилия к тому, чтобы аналоговые измеренные сигналы вблизи датчика преобразовывать с помощью так называемых “блоков объединения” в цифровые измеренные сигналы. Это обусловлено, в том числе, новыми типами датчиков или преобразователей (например, преобразователей Роговского, оптических преобразователей), сигналы которых не могут по аналоговому каналу передаваться на традиционные до сих пор расстояния. При этом такой блок объединения имеет один или несколько аналоговых измерительных входов, аналоговые входные сигналы которых затем дискретизируются с помощью аналого-цифрового преобразователя блока объединения и, таким образом, преобразуются в цифровые значения. Цифровые измеренные значения на выходе блока объединения обычно выдаются в форме датаграмм и через сеть связи или шину связи передаются на одно или более вышестоящих устройств автоматизации. Пример такого блока объединения описан, например, в европейской патентной заявке ЕР 2503668 A1.
Однако при применении сгенерированных блоками объединения цифровых измеренных значений возникают новые проблемы, которые связаны, по существу, с частотой дискретизации и/или моментами времени дискретизации соответствующих цифровых измеренных значений, применяемыми для формирования цифровых измеренных значений в блоке объединения. Так, например, может произойти, что устройству автоматизации требуются внутренние цифровые измеренные значения с частотой дискретизации, которая отклоняется от частоты дискретизации, применяемой в блоке объединения. Кроме того, при применении нескольких различных измеренных сигналов существует требование, состоящее в том, что они должны быть сопоставимыми друг с другом в отношении их частот дискретизации и их моментов времени дискретизации. Последнее имеет место, например, в устройствах автоматизации, которые содержат несколько цифровых сигнальных входов, которые получают цифровые измеренные значения от различных блоков объединения. Правда некоторые блоки объединения обычно синхронизируются между собой посредством внешнего сигнала временной синхронизации (например, 1PPS-импульсов времени GPS-сигнала) и, таким образом, имеют возможность согласования их частот дискретизации и их моментов времени дискретизации. Однако эта синхронизация является весьма затратной и при сбое внешнего сигнала временной синхронизации может сохраняться лишь условно.
Кроме того, измерительные преобразователи могут также сами выдавать на своих выходах цифровые измеренные значения, однако при этом проблема является той же, что и в случае цифровых измеренных значений, генерируемых блоками объединения.
Цифровой измерительный вход вышеуказанного типа и способ синхронизации нескольких цифровых входных сигналов в устройстве автоматизации известны, например, из немецкой выложенной заявки DE 198 60 720 A1. В соответствии с данным известным способом, на стороне блока объединения цифровые дискретные значения нескольких измеренных сигналов кодируются первым фильтром и затем передаются в устройство автоматизации. Оно выполняет, после приема кодированных цифровых измеренных значений, сначала пост-дискретизацию с тактом дискретизации, который по меньшей мере в два раза скорее, чем самая быстрая частота дискретизации измеренных сигналов.
При этом значения, отсутствующие в профиле кодированных цифровых измеренных значений, заполняются нулевыми значениями. Пост-дискретизированные таким образом кодированные цифровые измеренные значения подаются в фильтр интерполяции, который имеет характеристику фильтра, инверсную фильтру-кодеру. Таким образом, может быть достигнуто то, что все цифровые входные сигналы после обработки имеют общий такт дискретизации и общие моменты времени дискретизации.
Однако реализация этого известного способа предъявляет относительно высокие требования к вычислительной мощности устройства автоматизации, например, из-за пост-дискретизации с относительно высоким тактом дискретизации и заполнения нулевыми значениями на половинной частоте применяемой частоты дискретизации возникают зеркальные частотные компоненты цифровых измеренных сигналов, которые должны быть снова удалены только путем затратной фильтрации. Кроме того, текущие стандарты, такие как стандарт IEC 61850-9-2, не предусматривают кодирования сигнала на стороне блока объединения, так что сформированные цифровые измеренные сигналы с трудом могут обрабатываться устройствами автоматизации разных производителей.
Исходя из цифрового измерительного входа вышеуказанного типа, в основе изобретения, таким образом, лежит задача обеспечить цифровой измерительный вход, с помощью которого при более эффективном использовании вычислительных мощностей устройства автоматизации может осуществляться обработка цифровых входных измеренных значений, применимых функционально совместимым образом. В основе изобретения также лежит задача предложить соответствующее устройство автоматизации с цифровым измерительным входом, а также способ для обработки цифровых входных измеренных значений.
В отношении цифрового измерительного входа, для решения этой задачи в соответствии с изобретением предложено усовершенствовать измерительный вход вышеуказанного типа таким образом, что устройство преобразования сигнала на входной стороне содержит цифровой фильтр-кодер, а на выходной стороне - цифровой фильтр-декодер, между которыми предусмотрен интерполятор, при этом фильтр-кодер, интерполятор и фильтр-декодер таким образом согласованы друг с другом, что посредством них обеспечивается согласование цифровых входных измеренных значений в отношении частоты дискретизации и/или моментов времени дискретизации.
Посредством вышеуказанного выполнения устройства преобразования сигнала цифрового измерительного входа, можно выполнять согласование цифровых входных измеренных значений в отношении их частоты дискретизации и/или их моментов времени дискретизации без выполнения кодирования сигнала в блоке объединения, благодаря чему гарантируется применимость функционально совместимым образом цифровых входных измеренных значений для устройств различных производителей. Так как в устройстве преобразования сигнала помимо этого не выполняется никакая затратная пост-дискретизация с добавлением нулевых значений, можно минимизировать вычислительную мощность, требуемую для согласования, и связанное с этим время вычисления. При этом оба фильтра и интерполятор устройства преобразования сигнала взаимодействуют друг с другом таким образом, что достигается желательное изменение частоты дискретизации и/или сдвиг моментов времени дискретизации предоставленных на выходной стороне цифровых измеренных значений. Например, с помощью соответствующего изобретению цифрового измерительного входа может происходить изменение частоты дискретизации с 4 кГц на 16 кГц за счет того, что требуемые дополнительные значения дискретизации для цифровых выходных значений определяются путем интерполяции из профиля (характеристики) имеющихся на входной стороне цифровых входных измеренных значений. Кроме того, интерполятор может на основе известных цифровых входных измеренных значений с достаточной точностью для определенного будущего временного интервала оценивать профиль цифровых выходных измеренных значений, так что он практически используется в качестве экстраполятора и на основе прошлого профиля цифровых входных измеренных значений оценивает будущие цифровые выходные измеренные значения.
В соответствии с предпочтительной формой выполнения соответствующего изобретению цифрового измерительного входа, предусмотрено, что интерполятор выполнен с возможностью формирования интерполированных цифровых вспомогательных измеренных значений с применением модели сигнала.
Тем самым может осуществляться по возможности точная оценка определяемых путем интерполяции вспомогательных измеренных значений и, таким образом, цифровых выходных измеренных значений. В простейшем случае для интерполяции может быть использован линейный интерполятор на основе двух известных цифровых входных измеренных значений.
В качестве особенно предпочтительного, однако, рассматривается, если модель сигнала описывает квадратичную функцию.
При использовании квадратичной модели сигнала вида

интерполированные вспомогательные измеренные значения и, таким образом, цифровые выходные измеренные значения y могут определяться, с одной стороны, с относительно хорошей точностью, а с другой стороны, с разумными вычислительными затратами и разумной временной задержкой, так как для определения коэффициентов а, b и с интерполятора требуются только последние три цифровых входных измеренных значения.
Другая предпочтительная форма выполнения соответствующего изобретению цифрового измерительного входа также предусматривает, что фильтр-кодер и фильтр-декодер имеют индивидуальные передаточные функции, которые таким образом могут быть согласованы друг с другом, что их общая передаточная функция обуславливает регулируемый сдвиг фазовой характеристики последовательности цифровых входных измеренных значений для генерации желательного временного сдвига цифровых выходных измеренных значений по сравнению с цифровыми входными измеренными значениями.
В этой форме выполнения можно путем простого выбора передаточных функций обоих фильтров устройства преобразования сигнала реализовать желательный временной сдвиг профиля цифровых выходных измеренных значений относительно цифровых входных измеренных значений. Это достигается за счет воздействия на фазовую характеристику цифровых входных измеренных значений. При соответствующем согласовании передаточных функций отдельных фильтров можно получить суммарную передаточную функцию, которая реализует желательный временной эффект сдвига. За счет этого сравнительно простым способом, а именно, уже путем определения соответствующих коэффициентов фильтра, можно получить временной сдвиг профиля цифровых выходных измеренных значений, например, чтобы предпринять согласования друг с другом нескольких сдвинутых во времени поступающих цифровых профилей измеренных значений.
В частности, в отношении обоих фильтров, например, может быть предусмотрено, что фильтр-кодер имеет PD (пропорциональную с предварением)-характеристику, а фильтр-декодер имеет характеристику фильтра нижних частот.
В частности, за счет выполнения фильтра-декодера с характеристикой фильтра нижних частот может обеспечиваться то, что - уже содержащиеся в цифровых входных измеренных значениях или созданные при интерполяции - нежелательные высокие частотные компоненты в профиле цифровых выходных измеренных значений ослабляются в достаточной степени, так что они не оказывают помеховых воздействий на последующую дальнейшую обработку цифровых выходных измеренных значений для целей управления, контроля и/или защиты.
В соответствии с еще одной предпочтительной формой выполнения соответствующего изобретению цифрового измерительного входа, предусмотрено, что цифровой измерительный вход в форме модуля обработки выполнен с определенным аппаратными средствами программированием, в частности, ASIC или FPGA.
Выполнение цифрового измерительного входа в форме модуля обработки с определенным аппаратными средствами программированием по сравнению с процессорным модулем, обрабатывающим программное обеспечение устройства, предоставляет преимущество более высокой скорости обработки, так как возможные задержки, возникающие из-за обработки с процессорной поддержкой программного обеспечения устройства, могут быть исключены. Модуль обработки может быть выполнен, таким образом, узкоспециализированным для требуемой задачи обработки.
В этой связи в качестве предпочтительного рассматривается, если модуль обработки содержит регистр памяти для хранения с возможностью изменения коэффициентов фильтра для фильтра-кодера и/или фильтра-декодера.
За счет этого может быть достигнуто то, что передаточные функции обоих фильтров также впоследствии могут согласовываться в соответствии с желательной сигнальной характеристикой, в частности, желательной фазовой характеристикой общей суммарной передаточной функции.
В соответствии с еще одной предпочтительной формой выполнения соответствующего изобретения цифрового измерительного входа, предусмотрено, что приемное устройство выполнено с возможностью приема цифровых входных измеренных значений в форме датаграмм.
При этом цифровые входные измеренные значения от блока объединения могут передаваться в устройство автоматизации, например, как так называемые “дискретные измеренные значения” (SMV) в соответствии с принятым в настоящее время для связи в энергетических системах автоматизации стандартом IEC 61850, особенно разделом стандарта IEC 61850-9-2. Путем применения международно признанного стандарта для передачи цифровых входных измеренных значений функциональная совместимость еще больше повышается.
В этой связи также в качестве предпочтительного рассматривается, если приемное устройство выполнено с возможностью извлечения из датаграмм, содержащих цифровые входные значения, информации о первой частоте дискретизации и передачи ее в устройство преобразования сигнала.
Информация о частоте дискретизации, с которой были сформированы цифровые входные измеренные значения из аналогового измеренного сигнала, требуется интерполятору, чтобы иметь возможность корректным образом упорядочивать во времени принятые цифровые входные измеренные значения. Упомянутая информация может либо непосредственно содержаться в датаграммах (например, информация может при этом однократно или время от времени, или постоянно передаваться), либо косвенным образом получаться из самих цифровых входных измеренных значений. Например, с цифровыми входными измеренными значениями посредством блока объединения могут ассоциироваться так называемые временные метки, которые указывают момент времени дискретизации в блоке объединения и из которых может быть вычислена частота дискретизации. В качестве альтернативы, цифровые входные измеренные значения могут также включать в себя так называемые значения счета или “значения счетчика”, которые согласно их временной последовательности указывают на временной импульс синхронизации (например, 1PPS-сигнал). Из самого высокого значения такого значения счета можно также сделать вывод о частоте дискретизации (например, наивысшее значение 3999 означает частоту дискретизации 4 кГц, так как первое значение обычно получает значение счета 0).
Вышеуказанная задача в отношении устройства автоматизации решается устройством автоматизации с цифровым измерительным входом согласно одному из пунктов 1-9 формулы изобретения.
В отношении соответствующего изобретению устройства автоматизации справедливо все указанное выше для соответствующего изобретению цифрового измерительного входа, в частности, соответствующее изобретению устройство автоматизации может включать в себя цифровой измерительный вход согласно любой из вышеописанных форм выполнения. Также в отношении преимуществ устройства автоматизации согласно изобретению можно сослаться на преимущества соответствующего изобретению цифрового измерительного входа.
Устройство автоматизации может также иметь свои собственные локальные аналоговые измерительные входы в дополнение к цифровому измерительному входу. В этом случае в качестве предпочтительного варианта осуществления соответствующего изобретению электрического устройства автоматизации рассматривается, когда электрическое устройство автоматизации имеет по меньшей мере один аналоговый сигнальный вход, который выполнен с возможностью регистрации локального аналогового измеренного сигнала и формирования локальных цифровых измеренных значений, и когда устройство преобразования сигнала цифрового измерительного входа выполнено таким образом, чтобы для согласования цифровых входных измеренных значений в отношении частоты дискретизации и/или моментов времени дискретизации применять частоту дискретизации и/или моменты времени дискретизации локальных цифровых измеренных значений в качестве заданной частоты дискретизации и/или заданных моментов времени дискретизации.
При этой форме выполнения устройство автоматизации, наряду с цифровым измерительным входом, также имеет по меньшей мере один аналоговый измерительный вход, регистрирует посредством него локальным образом аналоговый измеренный сигнал и дискретизирует его с помощью собственного аналого-цифрового преобразователя с образованием локальных цифровых измеренных значений. При этом, с одной стороны, могут существовать различия между локально применяемой частотой дискретизации и частотой дискретизации предшествующего блока объединения. С другой стороны, обычно, временная задержка, возникающая из-за локальной дискретизации аналогового измеренного сигнала, отличается от той временной задержки, которая возникает при дискретизации в блоке объединения и последующей передаче сформированных там цифровых входных измеренных значений на устройство автоматизации. Как правило, локальная обработка в устройстве автоматизации будет вызывать более короткую временную задержку. Поэтому в таком устройстве автоматизации со смешанной аналоговой и цифровой регистрацией измеренных значений должно осуществляться согласование профиля цифровых входных измеренных значений с профилем локальных цифровых измеренных значений, чтобы достичь минимально возможной временной задержки. Это может быть обеспечено, например, с помощью соответствующей реализации передаточных функций обоих фильтров, которые влияют на фазовую характеристику поступающих цифровых входных измеренных значений таким образом, что происходит как бы обратный временной сдвиг, и исключается возникающая, по сравнению с локальными цифровыми измеренными значениями, дополнительная задержка. Кроме того, посредством интерполятора может осуществляться соответствующее этой временной задержке предварительное вычисление цифровых выходных измеренных значений для компенсации дополнительной временной задержки.
Другая предпочтительная форма выполнения соответствующего изобретению устройства автоматизации предусматривает, что устройство автоматизации содержит по меньшей мере один дополнительный цифровой измерительный вход, который выполнен в соответствии с упомянутым цифровым измерительным входом.
Посредством этой формы выполнения также несколько цифровых измерительных входов могут таким образом согласовываться друг с другом или с возможным локальным аналоговым измерительным входом, что соответствующие выдаваемые на выходной стороне цифровые выходные измеренные значения согласованы по их частоте дискретизации и/или их моментам времени дискретизации, т.е. каждый измерительный канал имеет свою собственную временную передаточную характеристику, которая выполнена таким образом, чтобы компенсировать существующие различия между отдельными измерительными каналами.
В качестве альтернативы, может быть также предусмотрено, что первый цифровой измерительный вход выполнен с возможностью приема и обработки множества профилей цифровых входных измеренных значений.
При этой альтернативе, различные профили цифровых входных измеренных значений через мультиплексор подаются на устройство согласования сигналов, которое – аналогично тому, как описано выше для цифрового измерительного входа – для каждого сигнала индивидуально выполняет согласование по отношению к частоте дискретизации и/или моментам времени дискретизации.
Указанная выше задача, по отношению к способу, решается способом обработки цифровых входных измеренных значений, которые были сформированы путем дискретизации аналогового измеренного сигнала с первой частотой дискретизации, причем в способе с помощью приемного устройства цифрового измерительного входа устройства автоматизации принимаются цифровые входные измеренные значения и с помощью устройства преобразования сигнала цифрового измерительного входа из цифровых входных измеренных значений формируются и предоставляются цифровые выходные измеренные значения, причем цифровые выходные измеренные значения относительно их частоты дискретизации и/или их соответствующего момента времени дискретизации согласованы с заданной частотой дискретизации и/или заданными моментами времени дискретизации.
В соответствии с изобретением предусмотрено, что цифровые входные измеренные значения с помощью цифрового фильтра-кодера устройства преобразования сигнала фильтруются для образования кодированных цифровых входных измеренных значений, кодированные цифровые входные измеренные значения с помощью интерполятора устройства преобразования сигнала интерполируются для формирования цифровых вспомогательных измеренных значений, и цифровые вспомогательные измеренные значения фильтруются с помощью цифрового фильтра-декодера устройства преобразования сигнала для формирования выходных цифровых измеренных значений, причем фильтр-кодер, интерполятор и фильтр-декодер таким образом согласованы друг с другом, что они осуществляют согласование цифровых входных измеренных значений в отношении частоты дискретизации и/или моментов времени дискретизации.
В отношении соответствующего изобретению способа справедливо все сказанное выше для соответствующего изобретению цифрового измерительного входа и соответствующего изобретению устройства автоматизации, так что соответствующий изобретению способ также пригоден для обработки цифровых входных измеренных значений согласно любым из вышеописанных форм выполнения соответствующего изобретению цифрового измерительного входа и соответствующего изобретению устройства автоматизации. Также в отношении преимуществ соответствующего изобретению способа, можно сослаться на преимущества соответствующего изобретению цифрового измерительного входа и соответствующего изобретению устройства автоматизации.
Предпочтительная форма выполнения соответствующего изобретению способа дополнительно предусматривает, что общая передаточная функция, полученная в результате связывания отдельных передаточных функций фильтра-кодера и фильтра-декодера, осуществляет регулируемый сдвиг фазовой характеристики последовательности цифровых входных измеренных значений для формирования желательного временного сдвига цифровых выходных измеренных значений по сравнению с цифровыми входными измеренными значениями.
В этой форме выполнения можно путем простого выбора передаточных функций обоих фильтров устройства преобразования сигнала реализовать желательный временной сдвиг профиля цифровых выходных измеренных значений относительно профиля цифровых входных измеренных значений.
Изобретение поясняется далее более подробно со ссылками на пример выполнения. Конкретный вариант осуществления примера выполнения для осуществления соответствующего изобретению цифрового измерительного входа, соответствующего изобретению устройства автоматизации и соответствующего изобретению способа никоим образом не следует понимать как ограничение; скорее, отдельные признаки осуществления примера выполнения могут свободно комбинироваться любым образом между собой и с признаками, описанными выше.
Фиг. 1 показывает схематичное представление энергетической системы автоматизации с блоками объединения, подключенными к электрическому устройству автоматизации;
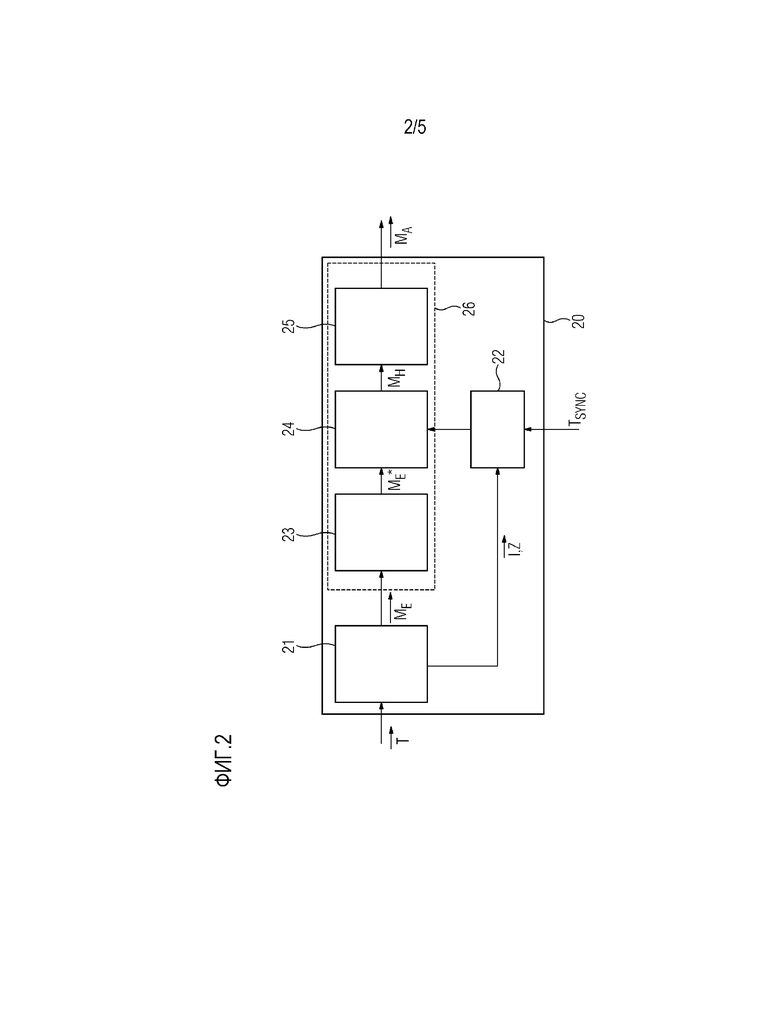
Фиг. 2 показывает схематичное представление примера выполнения цифрового измерительного входа с устройством преобразования сигнала;
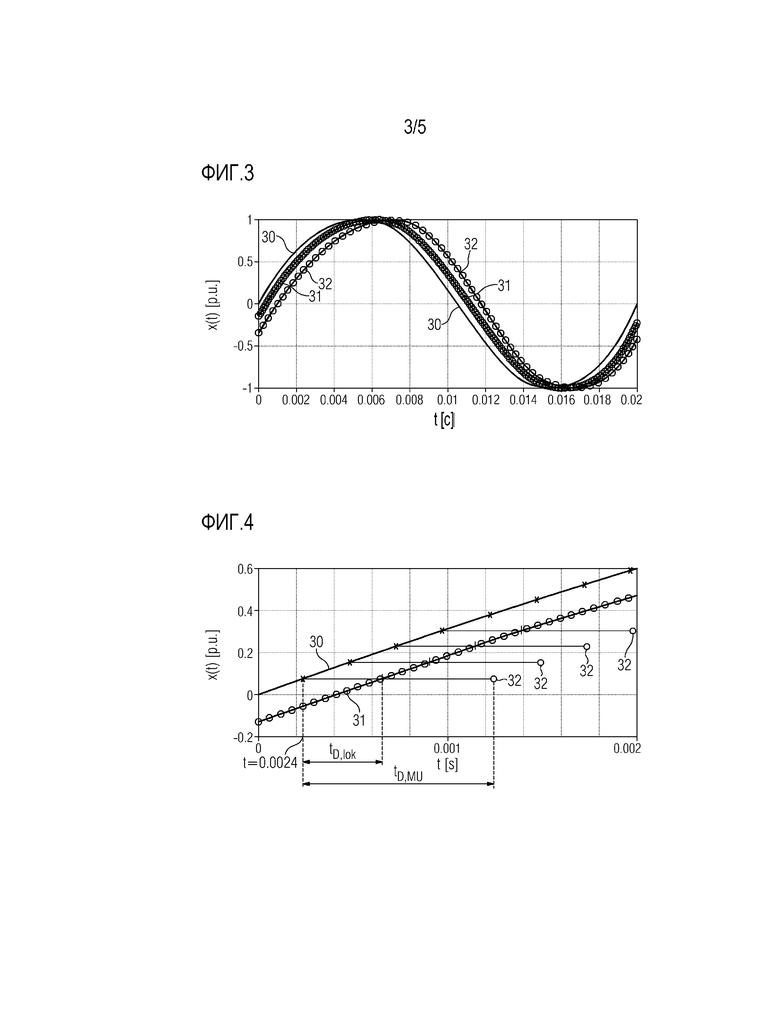
Фиг. 3 показывает диаграмму с профилями аналоговых сигналов, последовательности сгенерированных блоком объединения цифровых входных измеренных значений и последовательности зарегистрированных устройством автоматизации локальных цифровых измеренных значений;
Фиг. 4 показывает диаграмму с увеличенным фрагментом диаграммы на фиг. 3;
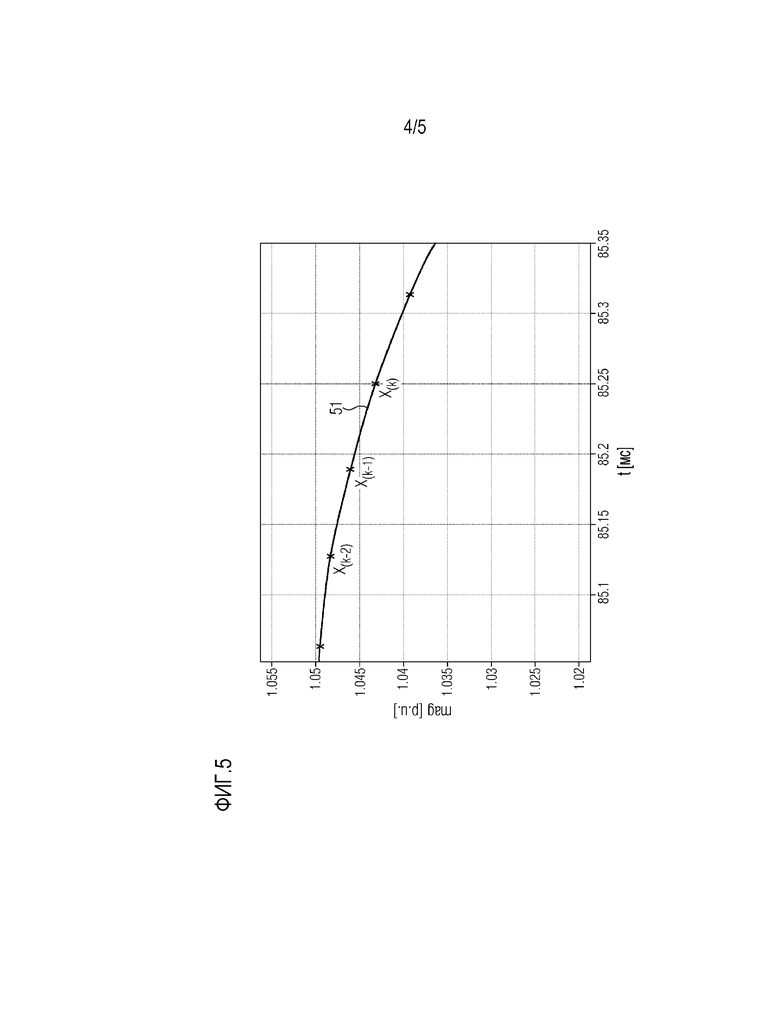
Фиг. 5 показывает диаграмму для пояснения процедуры интерполяции на основе входных цифровых измеренных значений; и
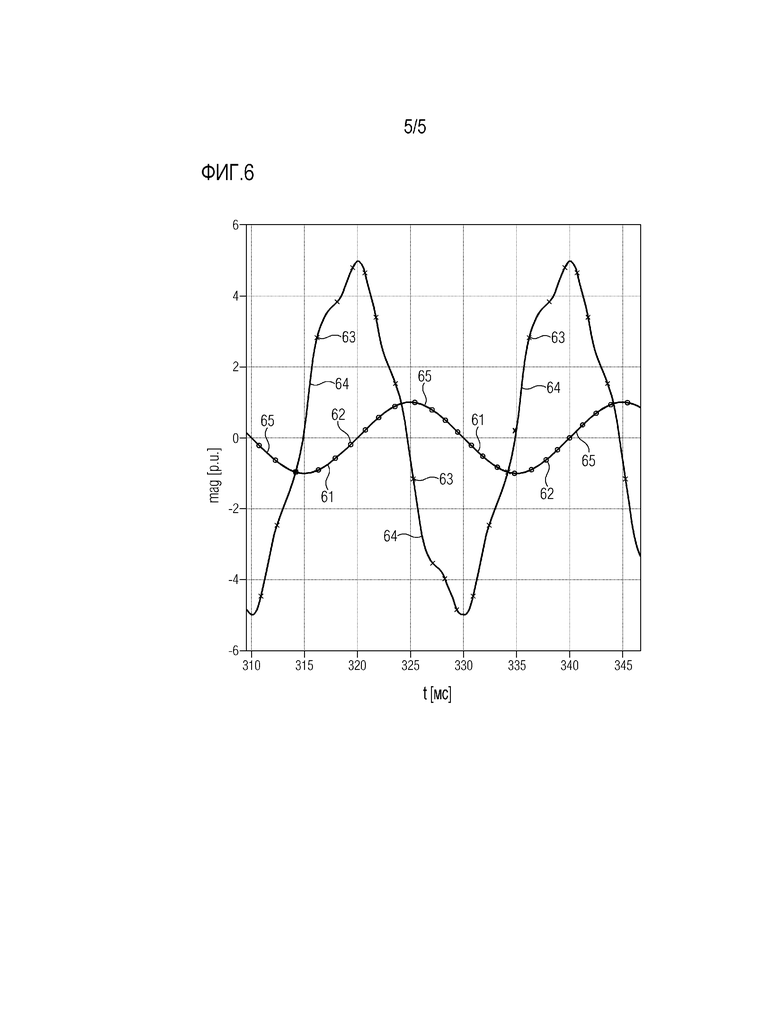
Фиг. 6 показывает диаграмму с различными профилями сигналов для пояснения обработки данных в устройстве преобразования сигнала.
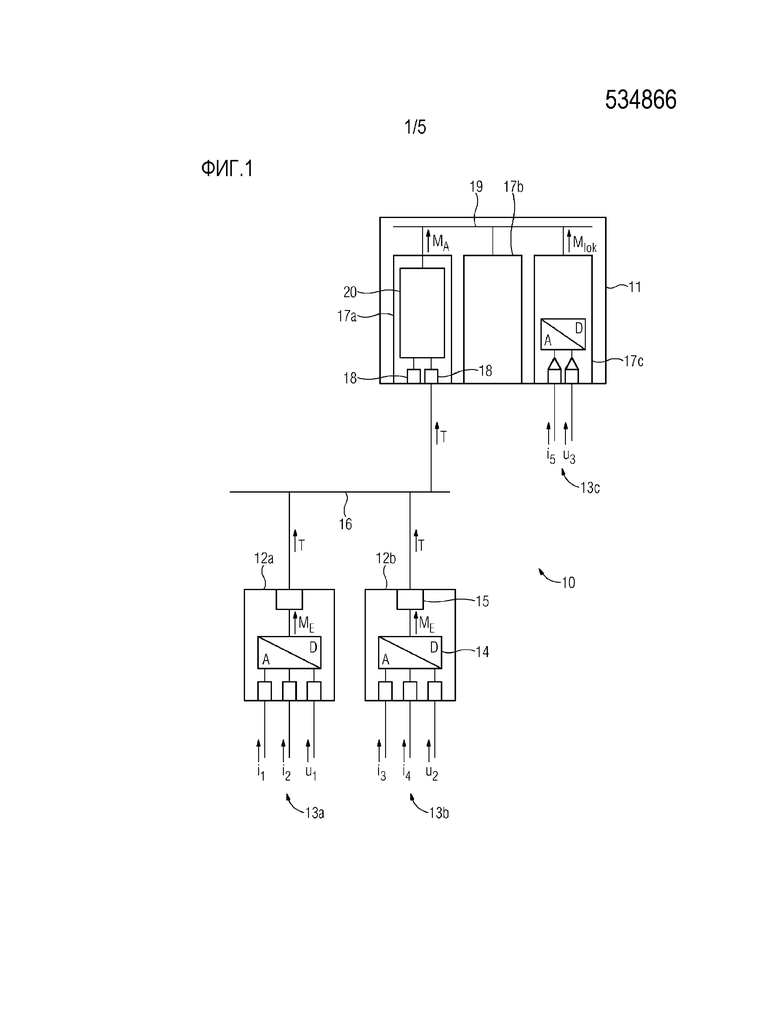
Фиг. 1 показывает в схематичном виде энергетическую систему 10 автоматизации с устройством 11 автоматизации и двумя блоками 12а-b объединения. Устройство 11 автоматизации может, например, быть энергетической системой автоматизации, предназначенной для управления, контроля и/или защиты электрической сети энергоснабжения, не показанной на фиг. 1. Устройство 11 автоматизации, описанное ниже, не должно обязательно использоваться в энергетической системе автоматизации, а может использоваться для автоматизации оборудования и процессов там, где должны обрабатываться сформированные внешним образом цифровые измеренные значения.
В местах 13а-b измерений сети энергоснабжения посредством соответствующих преобразователей регистрируются аналоговые измеренные сигналы, которые, например, указывают преобладающие в местах 13а и 13b измерений токи и/или напряжения. Более конкретно, например, в местах 13а и 13b измерений регистрируются аналоговые сигналы тока i1, i2, i3 и i4, а также аналоговые сигналы напряжения u1 и u2 и подаются в блоки 12а-b объединения. Далее обработка сигнала будет описана в качестве примера со ссылкой на блок 12b объединения, однако описание соответственно также применимо к блоку 12а объединения. Блок 12b объединения преобразует принятые аналоговые измеренные сигналы, в частности, здесь сигналы i3, i4, u2, путем дискретизации с помощью аналого-цифрового преобразователя 14 в цифровые входные измеренные значения МЕ. Здесь, аналого-цифровой преобразователь 14 может применять для дискретизации, например, частоту дискретизации 4 кГц. Такт дискретизации может синхронизироваться посредством внешнего сигнала временной синхронизации, например, 1PPS-импульсом (1PPS=1 импульс в секунду) или быть независимым. Блок 12b объединения формирует с цифровыми входными измеренными значениями MЕ датаграмму T и выводит его на выходной стороне через интерфейс 15 данных на шину 16 передачи данных, обозначаемую как шина процесса, для передачи измеренных значений, связанных с процессом, данных событий и команд. При этом датаграммы Т, содержащие цифровые входные измеренные значения MЕ, могут выполняться как так называемые “дискретные измеренные значения” (SMV) в соответствии со стандартом IEC 61850-9-2 и передаваться по шине 16 передачи данных на основе Ethernet.
Датаграммы Т подаются на устройство 11 автоматизации. Оно имеет модуль 17а шины процесса, с помощью которого принимаются датаграммы Т, и из них извлекаются содержащиеся в них цифровые входные измеренные значения MЕ. Модуль 17а шины процесса содержит для приема датаграмм Т по меньшей мере один физический интерфейс шины процесса, например, Ethernet-интерфейс 18. В примере выполнения согласно фиг. 1, модуль 17а шины процесса содержит, например, только два интерфейса 18 шины процесса, но конкретное количество интерфейсов шины процесса является произвольным. Цифровые входные измеренные значения в модуле 17а шины процесса согласуются, как детально описано ниже, в отношении их частоты дискретизации и/или их моментов времени дискретизации с заданной частотой дискретизации и/или заданными моментами времени дискретизации для получения цифровых выходных измеренных значений MА и предоставляются на выходной стороне для дальнейшей обработки.
Устройство 11 автоматизации содержит, наряду с модулем 17а шины процесса, также процессорный модуль 17b и аналоговый входной модуль 17с. Отдельные модули 17a-17c соединены между собой через внутреннюю шину 19 связи, через которую осуществляется обмен внутренними данными, а также выполняется временная синхронизация отдельных модулей 17а-17с, так что все модули 17а-17с устройства 11 автоматизации применяют одинаковое системное время.
Аналоговый входной модуль 17c напрямую соединен с расположенными в другом месте 13с измерений электрической сети энергоснабжения измерительными преобразователями и принимает от них, например, аналоговый сигнал тока i5 и аналоговый сигнал напряжения u3. Эти локально зарегистрированные аналоговые измеренные сигналы подаются на аналого-цифровой преобразователь аналогового входного модуля 17с и там преобразуются в локальные цифровые измеренные значения Mlok. Для этого применяется, например, такт дискретизации 16 кГц, который управляется посредством системного времени и посредством внешнего сигнала временной синхронизации (например, 1PPS-импульса) может устанавливаться точно по сравнению с другими сигналами.
Локальные цифровые измеренные значения Mlok, как и предоставленные модулем 17а шины процесса цифровые выходные измеренные значения MА, могут применяться процессорным модулем 17b для выполнения функций управления, контроля и/или защиты для электрической сети энергоснабжения. Если устройство 11 автоматизации представляет собой, например, электрическое защитное устройство, то процессорным модулем 17b выполняются, в том числе, алгоритмы защиты, такие как алгоритм дистанционной защиты или алгоритм дифференциальной защиты, для распознавания неисправностей в электрической сети энергоснабжения и отключения.
Для выполнения функций процессорному модулю 17b требуются взаимно сопоставимые измеренные значения, т.е. принятые модулем 17а шины процесса цифровые входные измеренные значения MЕ должны быть согласованы относительно их частоты дискретизации и/или их момента времени дискретизации с локальными цифровыми измеренными значениями Mlok, образованными из локально зарегистрированных аналоговых сигналов. В данном случае, например, как частота дискретизации, так и моменты времени дискретизации цифровых входных измеренных значений MЕ и локальных цифровых измеренных значений Mlok отличаются друг от друга, так как, с одной стороны, в блоках 12а-b объединения применялась другая частота дискретизации, чем в устройстве 11 автоматизации (4 кГц вместо 16 кГц), а с другой стороны, моменты времени дискретизации отдельных профилей измеренных значений не синхронизированы друг с другом. Поэтому принятые модулем 17а шины процесса цифровые входные измеренные значения MЕ перед передачей их на процессорный модуль 17b должны быть согласованы по их частоте дискретизации и/или их моментам времени дискретизации с локальными цифровыми измеренными значениями Mlok с помощью цифрового измерительного входа 20 для формирования цифровых выходных измеренных значений MА.
На фиг. 1 устройство 11 автоматизации, только в качестве примера, представлено в виде модульного устройства; однако эта структура не является обязательной для настоящего изобретения, так что могут применяться также немодульные устройства автоматизации или устройства с другим подразделением на модули. Кроме того, аналоговый измерительный вход также не является обязательным, также достаточно, если имеется только цифровой измерительный вход 20. Кроме того, может иметься несколько цифровых измерительных входов, которые выполнены соответственно описанному ниже цифровому измерительному входу 20. Кроме того, датаграммы нескольких измерительных каналов можно регистрировать с помощью того же самого цифрового измерительного входа и внутренним образом, например, путем соответствующего мультиплексирования, разделять на отдельные каналы измерения. При наличии нескольких цифровых измерительных входов, зарегистрированные здесь цифровые входные измеренные значения могут иметь различные моменты времени дискретизации и/или различные частоты дискретизации.
Работа цифрового измерительного входа 20 поясняется ниже более подробно со ссылкой на фиг. 2. При этом фиг. 2 показывает отдельные компоненты цифрового измерительного входа 20 в отдельном представлении. Они могут быть сконфигурированы в виде отдельных или комбинированных аппаратных или программных модулей, или как их комбинация.
Фиг. 2 показывает цифровой измерительный вход 20, который может быть, например, частью модуля 17а шины процесса (см. фиг. 1). Цифровой измерительный вход 20 включает в себя, среди прочего, приемное устройство 21 для приема датаграмм Т, содержащих цифровые входные измеренные значения MЕ, и устройство 26 преобразования сигнала для обработки принятых цифровых входных измеренных значений MЕ. Приемное устройство 21 извлекает цифровые входные измеренные значения MЕ из датаграмм T и соотносит их с отдельными аналоговыми измеренными сигналами блоков 12а-b объединения. При этом для каждого аналогового измеренного сигнала создаются индивидуальные профили цифровых входных измеренных значений MЕ. Они могут подаваться на дальнейшую обработку, например, посредством соответствующего мультиплексирования. Описанный ниже способ обработки цифровых входных измеренных значений MЕ для простоты поясняется на примере только для цифровых входных измеренных значений MЕ одного аналогового измеренного сигнала.
В дополнение к цифровым входным измеренным значениям MЕ, приемное устройство 21 само извлекает также информацию I о частоте дискретизации, с которой цифровые входные измеренные значения MЕ. были сформированы в блоке 12а-b объединения, и о моменте Z времени дискретизации соответствующего цифрового входного измеренного значения MЕ, из датаграмм Т. Например, информация I о применяемой частоте дискретизации может непосредственно содержаться в одном, некоторых или всех датаграммах Т. В качестве альтернативы, приемное устройство 21 может также получить информацию, как описано выше, косвенным образом через временные метки или значения счета, ассоциированные с цифровыми входными измеренными значениями MЕ. Информация Z о моменте времени дискретизации может быть выведена, например, из временной метки или значения счета.
Информации I и Z о частоте дискретизации и моменте времени дискретизации цифровых входных измеренных значений MЕ передаются от приемного устройства 21 к устройству 22 временного управления цифрового измерительного входа 20. В случае только косвенно определяемых информаций I и/или Z приемное устройство 21 может, в качестве альтернативы, передать временные метки или значения счета цифровых входных измеренных значений MЕ непосредственно на устройство 22 временного управления, которое затем само определяет информации I и/или Z о частоте I дискретизации или соответствующих моментах времени дискретизации.
На устройство 22 временного управления также подается задающий системное время внутренний временной сигнал TSync устройства 11 автоматизации. На основе информаций о моментах времени дискретизации цифровых измеренных значений, с одной стороны, и системного времени, с другой стороны, при известной временной задержке путем дискретизации в блоке 12а-b объединения и передачи между блоке 12а-b объединения и устройством 11 автоматизации, с одной стороны, определяется временной сдвиг между системным временем и моментами времени дискретизации цифровых входных измеренных значений MЕ, а с другой стороны, привязка между цифровыми входными измеренными значениями MЕ, основанными на временной базе соответствующего блока 12а-b объединения, и формируемыми в устройстве 26 преобразования сигнала цифровыми выходными измеренными значениями MА, основанными на системном времени устройства 11 автоматизации.
Полученные из датаграмм Т цифровые входные измеренные значения MЕ передаются от приемного устройства 21 на устройство 26 преобразования сигнала, которое на входной стороне содержит цифровой фильтр-кодер 23. Фильтр-кодер может иметь, например, передаточную функцию с PD-характеристикой. Цифровые входные измеренные значения MЕ фильтруются в цифровом фильтре-кодере 23 для образования кодированных цифровых входных измеренных значений MЕ*. После фильтрации фильтром-кодером 23, кодированные цифровые измеренные значения MЕ* подаются на интерполятор 24, который с применением модели сигнала на основе кодированных цифровых измеренных значений MЕ* выполняет интерполяцию для формирования цифровых вспомогательных измеренных значений MH, и при этом кодированные цифровые входные измеренные значения MЕ* в отношении их частоты дискретизации и их соответствующего момента времени дискретизации согласованы с требуемой частотой дискретизации и требуемыми моментами времени дискретизации. С этой целью, интерполятор 24 использует представленные устройством 22 временного управления информации о частоте дискретизации или моментах времени дискретизации цифровых измеренных значений, с одной стороны, и системном времени, с другой стороны. Интерполятор 24 вычисляет, например, на основе кодированных цифровых входных измеренных значений MЕ* путем интерполяции цифровых вспомогательных измеренных значений MH с частотой дискретизации 16кГц в заданные системным временем моменты времени дискретизации. Цифровые вспомогательные измеренные значения MH на выходной стороне передаются интерполятором 24 в фильтр-декодер 25, например, имеющий характеристику фильтра нижних частот. Фильтр-декодер 25 принимает, помимо прочего, функцию ограничения полосы частот, за счет чего нежелательные высокочастотные компоненты ослабляются. На выходной стороне фильтр-декодер 25 выдает цифровые выходные измеренные значения MА, которые относительно их частоты дискретизации и их моментов времени дискретизации согласованы со значениями, требуемыми для дальнейшей обработки в процессорном модуле 17b (см. фиг. 1). В частности, частота дискретизации и моменты времени дискретизации цифровых выходных измеренных значений MА после обработки в устройстве 26 преобразования сигнала соответствуют частоте дискретизации и моментам времени дискретизации локальных цифровых измеренных значений Mlok, применяемым для формирования локальных цифровых измеренных значений Mlok.
Передаточные функции фильтра-кодера 23 и фильтра-декодера 25 предпочтительно могут быть согласованы друг с другом таким образом, что результирующая суммарная передаточная функции за счет воздействия на фазовую характеристику цифровых входных измеренных значений MЕ осуществляется согласование временной задержки сформированных цифровых выходных измеренных значений MА с локальными цифровыми измеренными значениями Mlok. Это объясняется более подробно со ссылкой на фиг. 3 и 4.
Для этого на фиг. 3 на диаграмме, с одной стороны, представлен нормированный (p.u.=на единицу) профиль аналогового измеренного сигнала 30 в сети энергоснабжения по временим t. С другой стороны, на диаграмме показан профиль 31 локальных цифровых измеренных значений Mlok, сформированный посредством локальной дискретизации аналогового измеренного сигнала 30 в устройстве автоматизации, и профиль 32 цифровых входных измеренных значений MЕ, сформированный посредством дискретизации аналогового измеренного сигнала 30 в блоке объединения и последующей передачи в устройство автоматизации. Для профилей 31 и 32, дискретное значение указывается, соответственно, посредством эллипса.
Профили 31 и 32 сдвинуты во времени по сравнению с аналоговым измеренным сигналом 31; соответствующий временной сдвиг следует из времени обработки при дискретизации и, при необходимости, из времени передачи. С одной стороны, можно видеть, что локальные цифровые измеренные значения Mlok формируются с заметно более высокой частотой дискретизации (эллипсы расположены ближе друг к другу), чем цифровые входные измеренные значения MЕ блока объединения. С другой стороны, также видно, что за счет дискретизации в блоке объединения и последующей передачи цифровых входных измеренных значений MЕ профиль 32 имеет заметно больший временной сдвиг относительно аналогового измеренного сигнала 30, чем профиль 32 локальных цифровых измеренных значений Mlok.
Это еще раз подчеркивается на фиг. 4. На фиг. 4 для этого область диаграммы, показанной на фиг. 3, между t=0c и t=0,002c представлена фрагментарно в увеличенном виде. Вновь можно видеть профили 30, 31 и 32 аналогового сигнала, локальных цифровых измеренных значений Mlok и цифровых входных измеренных значений MЕ. Также обозначены для момента времени t=0,0024с, c одной стороны, временная задержка tD,lok до генерации соответствующего локального цифрового измеренного значения Mlok, а также временная задержка tD,MU до генерации цифрового входного измеренного значения MЕ посредством блока объединения и его передачи на устройство автоматизации.
Чтобы иметь возможность сравнивать друг с другом оба профиля 31 и 32, с одной стороны, частота дискретизации и моменты времени дискретизации цифровых входных измеренных значений MЕ и локальных цифровых измеренных значений Mlok должны быть согласованы друг с другом с помощью устройства 26 преобразования сигнала (см. фиг. 2), а с другой стороны, временная задержка при предоставлении соответствующих измеренных значений в устройстве автоматизации должна быть унифицирована. Для того чтобы в целом гарантировать по возможности короткое время срабатывания устройства автоматизации, для этого в качестве опорного сигнала выбирается профиль 31 локальных цифровых измеренных значений Mlok.
Посредством интерполятора, с одной стороны, частота дискретизации цифровых входных измеренных значений MЕ соответственно увеличивается, а с другой стороны, их моменты времени дискретизации синхронизируются с таковыми для локальных цифровых измеренных значений Mlok. Посредством взаимодействия фильтра-кодера и фильтра-декодера, на фазовую характеристику цифровых входных измеренных значений MЕ оказывается соответствующее воздействие, чтобы компенсировать tD,MU-tD,lok обеих временных задержек профилей 31 и 32. Тем самым профиль 32 цифровых входных измеренных значений MЕ приводится почти в совпадение с профилем 31 локальных цифровых измеренных значений Mlok.
Посредством фильтра-кодера, принятые от блока объединения цифровые входные измеренные значения MЕ фильтруются без предшествующего преобразования частоты дискретизации. Из полученных кодированных цифровых входных измеренных значений MЕ*, посредством интерполятора формируются цифровые вспомогательные измеренные значения MH в желательные новые моменты времени дискретизации с желательной новой частотой дискретизации из кодированных цифровых измеренных значений MЕ*. Состоящий из цифровых вспомогательных измеренных значений MH новый поток дискретных значений с помощью фильтра-декодера преобразуется в цифровые выходные измеренные значения MА новой частоты дискретизации.
Если за счет обработки сигнала в устройстве преобразования сигнала не желателен никакой временной сдвиг, свертка передаточных функций фильтра-кодера и фильтра-декодера во временной области дает значение 1. Это всегда возможно в том случае, когда частоты дискретизации до и после интерполяции равны, или после интерполяции применяется более высокая частота дискретизации. Кроме того, за счет выбора суммарной передаточной функции с заданной частотно-зависимой или постоянной групповой задержкой для свертки передаточных функций фильтра-кодера и фильтра-декодера, частотно-зависимый временной сдвиг устанавливается таким образом, что возникающая групповая задержка цифровых входных измеренных значений MЕ точно согласуется с групповой задержкой локальных цифровых измеренных значений Mlok. Таким образом, может осуществляться согласование передаточной характеристики цифровых входных измеренных значений MЕ, принятых от блока объединения, с передаточной характеристикой локальных цифровых измеренных значений Mlok. Если групповая задержка цифровых входных измеренных значений MЕ от блока объединения уже больше, чем групповая задержка локальных цифровых измеренных значений Mlok, то групповая задержка входных измеренных значений MЕ может также устанавливаться на целое кратное групповой задержки локальных цифровых измеренных значений Mlok. Задержка потока значений локальных цифровых измеренных значений на число дискретных значений, которое соответствует разности обеих групповых задержек, обеспечивает тогда синхронные друг с другом потоки значений.
Интерполяция осуществляется на основе модели сигнала, так что в интерполированном профиле цифровых вспомогательных измеренных значений MH генерируется ошибка интерполяции только выше половины первоначальной частоты дискретизации, и эта ошибка интерполяции ослабляется фильтром-декодером настолько, что ошибки интерполяции в предоставленном на выходе фильтра-декодера профиле цифровых выходных измеренных значений MА имеют амплитуду ниже требуемого разрешения сигнала.
В отношении выполнения фильтров, могут быть представлены, например, следующие соображения:
Описанный способ может быть реализован, например, посредством применения цифровых IIR-фильтров для фильтра-кодера и фильтра-декодера. Если за счет обоих фильтров в общем не должно осуществляться никакого временного сдвига профиля цифровых входных измеренных значений, то необходимо применять следующую суммарную передаточную функцию в частотной области:
G(jω)=GEnc(jω)⋅ GDec(jω)=1
При этом
G(jω) обозначает суммарную передаточную функцию в частотной области,
GEnc(jω) обозначает передаточную функцию фильтра-кодера,
GDec(jω) обозначает передаточную функцию фильтра-декодера,
ω обозначает круговую частоту, и
j обозначает мнимое число.
Для последовательной цепи фильтра-кодера и фильтра-декодера в этом случае желательна суммарная передаточная функция, которая не приводит к изменению сигнала. Это возможно всегда в том случае, когда частоты дискретизации до и после интерполяции равны, или после интерполяции используется более высокая частота дискретизации. Кроме того, за счет выбора суммарной передаточной функции с заданной частотно-зависимой или постоянной групповой задержкой для свертки передаточных функций фильтра-кодера и фильтра-декодера, частотно-зависимый временной сдвиг устанавливается таким образом, что возникающая групповая задержка цифровых входных измеренных значений точно согласуется с групповой задержкой локальных цифровых измеренных значений. Таким образом, может осуществляться согласование передаточной характеристики принятых от блока объединения цифровых входных измеренных значений с передаточной характеристикой локальных цифровых измеренных значений.
В случае более низкой, по сравнению с первоначальной частотой дискретизации, частоты дискретизации цифровых выходных измеренных значений, для суммарной передаточной функции обоих фильтров должна выбираться характеристика фильтра нижних частот с соответственно желательными свойствами подавления наложения. Например, для фильтра-кодера может применяться передаточная функция
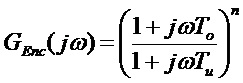
При этом
То обозначает верхнюю постоянную времени фильтра,
Тu обозначает нижнюю постоянную времени фильтра,
n обозначает порядок фильтра.
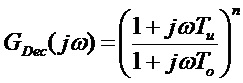
Для фильтра-декодера может соответственно выбираться передаточная функция
Посредством билинейного преобразования (см., например, http://en.wikipedia.org/wiki/Bilinear transform) можно из вышеуказанных аналоговых передаточных функций разработать цифровые IIR-фильтры, которые допускают реализацию фильтров посредством дифференциальных уравнений в форме:
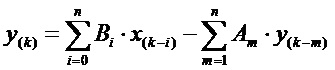
При этом
А и В обозначают коэффициенты фильтра,
k обозначает значение счета соответствующего измеренного значения,
x обозначает измеренные значения, имеющиеся на входе фильтра, и
y обозначает измеренные значения, выдаваемые на выходной стороне фильтра.
За счет индивидуального задания коэффициентов А и В для отдельных фильтров можно оказывать влияние на суммарную передаточную функцию желательным образом. Если цифровой измерительный вход выполнен в виде специализированной интегральной схемы (ASIC) или программируемой вентильной матрицы (FPGA), коэффициенты фильтра могут, например, задаваться с возможностью изменения в регистре памяти соответствующего модуля.
Для фильтра могут быть использованы, например, следующие параметры:

Для интерполятора может, например, применяться модель сигнала в форме квадратичной функции:

Коэффициенты а, b и c интерполятора могут формироваться путем сравнения коэффициентов из последних трех дискретных значений потока данных, имеющегося на входе интерполятора. Это представлено для примера на фиг. 5, которая показывает диаграмму с профилем кодированных цифровых входных измеренных значений x(k-2), x(k-1) и x(k), а также с интерполированным профилем 51. Коэффициенты а, b и c могут определяться следующим образом:

В качестве значения ta здесь обозначается заданный частотой дискретизации временной интервал между двумя цифровыми измеренными значениями. Опорной точкой для t=0 вычисляемых коэффициентов модели сигнала здесь является x(k-2). Из имеющихся на входе интерполятора кодированных цифровых входных измеренных значений MЕ* могут теперь с использованием модели сигнала вычисляться в приведенной выше форме цифровые вспомогательные измеренные значения MH выдаваемого на выходной стороне интерполятора профиля для желательных моментов времени дискретизации. Для них может также выбираться другая частота дискретизации, например, может происходить повышение частоты дискретизации с 4 кГц до 16 кГц.
Посредством интерполяции в профиле имеющихся на выходной стороне вспомогательных измеренных значений MH формируются дополнительные спектральные компоненты, которые не содержались в исходном сигнале. Эти спектральные компоненты затем посредством фильтрации с помощью фильтра-декодера подавляются в такой степени, что вызванными интерполяцией гармониками можно пренебречь.
На фиг. 6 показаны профили измеренного сигнала в различных местах в цепочке обработки. Ссылочной позицией 61 на фиг. 6 обозначен профиль аналогового измеренного сигнала перед дискретизацией посредством блока объединения. При дискретизации формируются обозначенные кружками цифровые входные измеренные значения 62, которые передаются на устройство автоматизации. В фильтре-кодере устройства преобразования сигнала из приложенного на входе фильтра профиля цифровых входных измеренных значений 62 формируется профиль кодированных цифровых входных измеренных значений 63 (на фиг. 6 обозначены крестиками) и передается на интерполятор. Интерполятор согласует профиль кодированных цифровых входных измеренных значений 63 относительно частоты дискретизации и/или моментов времени дискретизации с желательными параметрами и формирует на выходной стороне профиль 64 цифровых вспомогательных измеренных значений. Они затем подаются на фильтр-декодер, который на выходной стороне согласованный по частоте дискретизации и моментам времени дискретизации профиль 65 цифровых выходных измеренных значений. Как видно из фиг. 6, этот профиль 65 желательным образом перекрывается с аналоговым измеренным сигналом 61.
Цифровой измерительный вход в соответствии с изобретением предпочтительно реализуется посредством быстродействующей интегральной схемы (VHDL) или посредством реализации схематики в FPGA или ASIC, чтобы предотвратить возможные задержки, обусловленные реализацией программно-аппаратными средствами.
С помощью описанного цифрового измерительного входа устройства автоматизации и описанного способа обработки цифровых входных измеренных значений, с одной стороны, для каждого поступающего профиля цифровых входных измеренных значений может осуществляться согласование частоты дискретизации и/или моментов времени дискретизации. Кроме того, как описано выше, можно согласовывать цифровые входные измеренные значения с непосредственно дискретизируемыми устройством автоматизации локальными цифровыми измеренными значениями. Кроме того, несколько профилей цифровых входных измеренных значений могут быть согласованы друг с другом. При этом соответствующие применяемые блоки объединения могут применять различные частоты дискретизации, а также различные моменты времени дискретизации, так что и при сбое внешней синхронизации с помощью описанного формирования цифровых выходных измеренных значений гарантируется применимость цифровых входных измеренных значений.
Кроме того, в пределах объема настоящего изобретения возможно, что несколько внешних сигналов временной синхронизации применяются для соответствующего одного блока объединения или группы блоков объединения. Эта сигналы временной синхронизации также могут генерироваться самими блоками объединения. Таким образом, выдаваемые этими блоками объединения входные измеренные значения могут тогда синхронизироваться с локальными цифровыми измеренными значениями и в случае сбоя сигнала временной синхронизации для синхронизации блоков объединения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЯМОЙ ЦИФРОВОЙ ПРИЕМНИК С ЛОКАЛЬНЫМ НЕЗАВИСИМЫМ ТАКТОВЫМ СИГНАЛОМ | 2010 |
|
RU2559716C2 |
| УСТРОЙСТВО ЦИФРОВОЙ ПЕРЕДАЧИ | 1990 |
|
RU2145464C1 |
| Система передачи и приема сигналов с адаптивной дифференциальной импульсно-кодовой модуляцией | 1983 |
|
SU1100741A1 |
| Устройство сопряжения каналов тональной частоты цифровых и аналоговых систем передачи | 1981 |
|
SU1061274A1 |
| ЦИФРОВОЙ МАГНИТОФОН | 1992 |
|
RU2054715C1 |
| СИГМА-ДЕЛЬТА АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ С ГАЛЬВАНИЧЕСКОЙ РАЗВЯЗКОЙ НА КОНДЕНСАТОРАХ И КОДЕРАХ МАНЧЕСТЕР II | 2011 |
|
RU2447577C1 |
| Устройство для цифровой обработки сигналов | 1977 |
|
SU750481A1 |
| АБОНЕНТСКИЙ БЛОК ДЛЯ БЕСПРОВОДНОЙ ЦИФРОВОЙ ТЕЛЕФОННОЙ СИСТЕМЫ | 1988 |
|
RU2231222C2 |
| Способ адаптивного аналого-цифрового преобразования и устройство для его осуществления | 2014 |
|
RU2628261C2 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ИНТЕРВАЛА ВРЕМЕНИ | 2014 |
|
RU2546075C1 |
Группа изобретений относится к автоматическим регуляторам. Цифровой измерительный вход для электрического устройства автоматизации содержит приемное устройство и устройство преобразования сигналов. Приемное устройство предназначено для приема цифровых входных измеренных значений. Устройство преобразования сигналов выполнено с возможностью формировать и предоставлять цифровые выходные измеренные значения. Причем цифровые выходные значения согласованы с заданной частотой дискретизации и/или заданными моментами времени дискретизации. Устройство преобразования сигнала на входной стороне содержит цифровой фильтр-кодер, а на выходной стороне – цифровой фильтр-декодер, между которыми предусмотрен интерполятор. При этом данные устройства согласованы таким образом, что обеспечивается согласование цифровых входных измеренных значений в отношении частоты дискретизации и/или моментов времени дискретизации. Заявлены также устройство автоматизации с цифровым измерительным входом и способ обработки цифровых входных измеренных значений. Технический результат заключается в более эффективном использовании вычислительных мощностей. 3 н. и 12 з.п. ф-лы, 6 ил.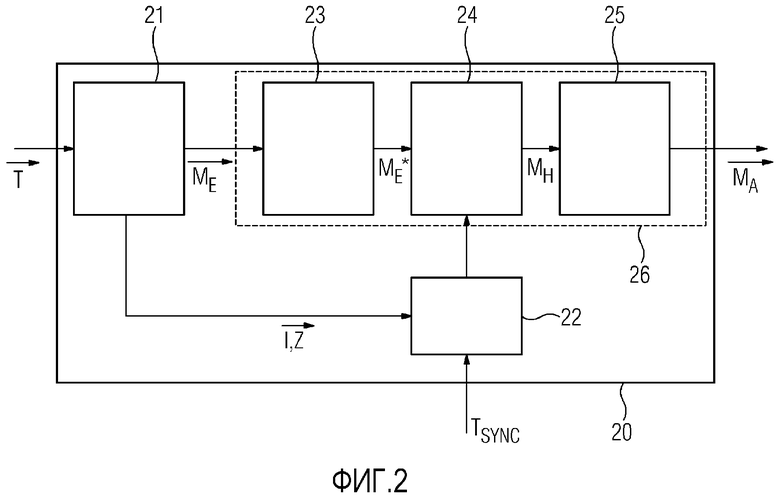
1. Цифровой измерительный вход (20) для электрического устройства (11) автоматизации с
- приемным устройством (21), которое предназначено для приема цифровых входных измеренных значений, которые генерируются путем дискретизации аналогового измеренного сигнала с первой частотой дискретизации; и
- устройством (26) преобразования сигналов, которое выполнено таким образом, чтобы из цифровых входных измеренных значений формировать и предоставлять цифровые выходные измеренные значения, причем цифровые выходные измеренные значения в отношении их частоты дискретизации и/или их соответствующего момента времени дискретизации согласованы с заданной частотой дискретизации и/или заданными моментами времени дискретизации;
отличающийся тем, что
- устройство (26) преобразования сигнала на входной стороне содержит цифровой фильтр-кодер (23), а на выходной стороне - цифровой фильтр-декодер (25), между которыми предусмотрен интерполятор (24), при этом
- фильтр-кодер (23), интерполятор (24) и фильтр-декодер (25) таким образом согласованы друг с другом, что посредством них обеспечивается согласование цифровых входных измеренных значений в отношении частоты дискретизации и/или моментов времени дискретизации.
2. Цифровой измерительный вход (20) по п. 1, отличающийся тем, что
- интерполятор (24) выполнен с возможностью генерации интерполированных цифровых вспомогательных измеренных значений с применением модели сигнала.
3. Цифровой измерительный вход (20) по п. 2, отличающийся тем, что
- модель сигнала является квадратичной функцией.
4. Цифровой измерительный вход (20) по любому из предыдущих пунктов, отличающийся тем, что
- фильтр-кодер (23) и фильтр-декодер (25) имеют индивидуальные передаточные функции, которые таким образом могут быть согласованы друг с другом, что их общая передаточная функция обуславливает регулируемый сдвиг фазовой характеристики последовательности цифровых входных измеренных значений для генерации желательного временного сдвига цифровых выходных измеренных значений по сравнению с цифровыми входными измеренными значениями.
5. Цифровой измерительный вход (20) по п. 1, отличающийся тем, что
- фильтр-кодер (23) имеет PD-характеристику, а фильтр-декодер (25) имеет характеристику фильтра нижних частот.
6. Цифровой измерительный вход (20) по п. 1, отличающийся тем, что
- цифровой измерительный вход (20) выполнен в форме модуля обработки с определенным аппаратными средствами программированием, в частности, ASIC или FPGA.
7. Цифровой измерительный вход (20) по п. 6, отличающийся тем, что
- модуль обработки содержит регистр памяти, в котором хранятся с возможностью изменения коэффициенты фильтра фильтра-кодера и/или фильтра-декодера.
8. Цифровой измерительный вход (20) по п. 1, отличающийся тем, что
- приемное устройство (21) выполнено с возможностью приема цифровых входных измеренных значений в форме датаграмм.
9. Цифровой измерительный вход (20) по п. 8, отличающийся тем, что
- приемное устройство (21) выполнено с возможностью извлечения из датаграмм, содержащих цифровые входные измеренные значения, информации о первой частоте дискретизации и передачи ее в устройство (26) преобразования сигнала.
10. Электрическое устройство (11) автоматизации с цифровым измерительным входом (20) согласно любому из пунктов 1-9.
11. Электрическое устройство (11) автоматизации по п. 10, отличающееся тем, что
- электрическое устройство (11) автоматизации имеет по меньшей мере один аналоговый сигнальный вход, который выполнен с возможностью регистрации локального аналогового измеренного сигнала и формирования локальных цифровых измеренных значений; и
- устройство (26) преобразования сигнала цифрового измерительного входа (20) выполнено таким образом, чтобы для согласования цифровых входных измеренных значений в отношении частоты дискретизации и/или моментов времени дискретизации применять частоту дискретизации и/или моменты времени дискретизации локальных цифровых измеренных значений в качестве заданной частоты дискретизации и/или заданных моментов времени дискретизации.
12. Электрическое устройство (11) автоматизации по п. 10 или 11, отличающееся тем, что
- устройство (11) автоматизации содержит по меньшей мере один дополнительный цифровой измерительный вход, который выполнен в соответствии с цифровым измерительным входом (20).
13. Электрическое устройство (11) автоматизации по п. 10 или 11, отличающееся тем, что
- цифровой измерительный вход (20) выполнен с возможностью приема и обработки множества профилей цифровых входных измеренных значений.
14. Способ обработки цифровых входных измеренных значений, которые были сформированы путем дискретизации аналогового измеренного сигнала с первой частотой дискретизации, причем в способе
- с помощью приемного устройства (21) цифрового измерительного входа (20) устройства (11) автоматизации принимают цифровые входные измеренные значения; и
- с помощью устройства (26) преобразования сигнала цифрового измерительного входа (20) из цифровых входных измеренных значений формируют и предоставляют цифровые выходные измеренные значения, причем цифровые выходные измеренные значения относительно их частоты дискретизации и/или их соответствующего момента времени дискретизации согласованы с заданной частотой дискретизации и/или заданными моментами времени дискретизации;
отличающийся тем, что
- цифровые входные измеренные значения с помощью цифрового фильтра-кодера (23) устройства (26) преобразования сигнала фильтруют для образования кодированных цифровых входных измеренных значений,
- кодированные цифровые входные измеренные значения с помощью интерполятора (24) устройства (26) преобразования сигнала интерполируют для формирования цифровых вспомогательных измеренных значений; и
- цифровые вспомогательные измеренные значения фильтруют с помощью цифрового фильтра-декодера (25) устройства (26) преобразования сигнала для формирования цифровых выходных измеренных значений, причем
- фильтр-кодер (23), интерполятор (24) и фильтр-декодер (25) таким образом согласованы друг с другом, что они осуществляют согласование цифровых входных измеренных значений в отношении частоты дискретизации и/или моментов времени дискретизации.
15. Способ по п. 14, отличающийся тем, что
- общая передаточная функция, полученная в результате связывания отдельных передаточных функций фильтра-кодера (23) и фильтра-декодера (25), осуществляет регулируемый сдвиг фазовой характеристики последовательности цифровых входных измеренных значений для формирования желательного временного сдвига цифровых выходных измеренных значений по сравнению с цифровыми входными измеренными значениями.
| DE 19860720 A1, 29.06.2000 | |||
| US 6137349 A, 24.10.2000 | |||
| Съемное приспособление к фотоаппаратам типа ФЭД для автоматической съемки серии снимков | 1951 |
|
SU109614A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

