Изобретение относится к области левитирующего железнодорожного транспорта на традиционном рельсовом пути.
Известна конструкция существующего железнодорожного подвижного состава - пассажирских и грузовых вагонов.
Недостатком является необходимость в тяговых локомотивах, очень большое энергопотребление, основа движения - «колесо-рельс» в тележках вагонов вызывает повышенный износ рельсовых путей. Конструкция тележек создает динамические нагрузки, разрушающие путевое хозяйство, ограничивает транспортную скорость, вызывает дискомфорт для пассажиров и создает шумовое загрязнение. Возникает потребность в проблемном бесстыковом пути.
Наиболее близким аналогом, взятого в качестве прототипа, является проект «RusMaglev» (http:/www.online812ru/2016/06/15/006/).
Недостатками известного решения являются: необходимость в реализации проекта - в создании специальной инфраструктуры высокой стоимости: специального путевого хозяйства (поднятые на бетонных опора коли из специализированных плит с проложенными по всей длине электромагнитами или постоянными магнитами; создание специального подвижного состава и специальных инженерных сетей и эксклюзивных железнодорожных строений - вокзалов, мостов, тоннелей, большие трудозатраты и высокие экономические затраты.
Раскрытие сущности изобретения.
Основной задачей, на решение которой направлено заявляемое техническое решение, является создание железнодорожного подвижного состава с использованием технологии Maglev, стандартных пассажирских и грузовых вагонов на левитирующих тележках, использующих существующую железнодорожную инфраструктуру, для обеспечения скоростей движения на обычных дорогах, скоростных и высокоскоростных дорогах с заданным уровнем безопасности и комфорта при обеспечении максимальной сохранности верхнего строения пути.
Техническим результатом, достигаемым предложенным техническим решением, является создание надежного скоростного железнодорожного транспорта с минимальными эксплуатационными расходами.
Указанный технический результат достигается тем, что в магнитоплане, включающем вагоны, высокоэнергетические постоянные магниты, новым является то, что стандартные пассажирские и грузовые вагоны левитируют по существующим рельсовым путям на левитирующих тележках, выполненных на базе армированных эластичных гусениц с установленными по всей длине высокоэнергетическими постоянными магнитами, левитирующими с такими же магнитами в несущей конструкции тележки, в которой установлены линейные двигатели, а также ролики бокового упора и тормозные колодки.
Предлагаемое техническое решение дополняют частные отличительные признаки, направленные на решение поставленной задачи, а именно: тележки устанавливают на рельсы с упором на армированные эластичные гусеницы через левитирующее пространство, несущая конструкция тележки установлена шкворнем в существующее отверстие в раме днища вагона, тележки могут поворачиваться относительно продольной оси вагона, удержание поезда в колее производится роликами бокового упора в горизонтальной плоскости с упором их в головки рельс, при прохождения препятствий выше уровня головки рельс удержание в колее производят реборды тормозных колодок, армирование эластичных гусениц может быть выполнено стальными лентами, кевларовыми канатами и цепями, высокоэнергетические постоянные магниты одинаковой конструкции установлены навстречу друг другу в гусенице и несущей конструкции тележки одинаковой полярностью «N-N» или «S-S», они подпружинены, со стороны торцевых поверхностей гусениц на несущей конструкции тележки расположены дуговые генераторы с углом охвата до 180 градусов, установлены на несущей конструкции тележки по два на гусеницу с торцевых ее участков, используются для зарядки бортовых аккумуляторов, линейные двигатели тележек, осуществляющие тягу, и дуговые генераторы управляются контроллерами.
В основу магнитоплана положен принцип движения железнодорожного подвижного состава на левитирующих тележках, заменяющих традиционные существующие колесные тележки. Посадка левитирующих тележек к вагонам производится также как существующих колесных тележек - установкой несущей конструкции тележки шкворнем в существующее отверстие в раме днища вагона. Тележки могут поворачиваться относительно продольной оси вагона при похождении поезда криволинейных участках пути. Удержание поезда в колее производится роликами бокового упора в горизонтальной плоскости с упором их в головки рельс, которые поднимаются при прохождении участков пути с контррельсами и железнодорожными переездами. При прохождении препятствий выше уровня головки рельс, удержание в колее производят реборды тормозных колодок. Тележки устанавливают на рельсы с упором на армированные эластичные гусеницы с установленными по всей длине высокоэнергетическими постоянными магнитами, левитирующими с такими же магнитами в несущей конструкции тележки.
Эластичные армированные гусеницы тележек, правая и левая, расположены вдоль рельсов и имеют четыре функциональных участка:
- левитации - участок гусениц в контакте с рельсами, где расположены, напротив, в несущей конструкции тележки, высокоэнергетические постоянные магниты, ориентированные одноименными полюсами магнитов; усилия отталкивания четырех гусениц (по две на двух тележках) достаточно, чтобы с запасом поднять в воздух вагон с тележками;
- линейных двигателей, осуществляющих движение, в зоне верхних горизонтальных участков гусениц;
- дуговых генераторов, по два на гусеницу с торцевых ее участков для зарядки бортовых аккумуляторов; возможно применение устройства и без дуговых генераторов, однако в таком случае сужается возможность автономного питания магнитоплана.
Боковую составляющую усилий экипажа (вагона и тележек) несут ролики бокового упора в горизонтальной плоскости в контакте с головками рельс с внутренней стороны колеи. Торможение выполняется колодочными тормозами в контакте с рельсами.
Линейные двигатели тележек, осуществляющие тягу, и генераторы зарядки аккумуляторов управляются контроллерами.
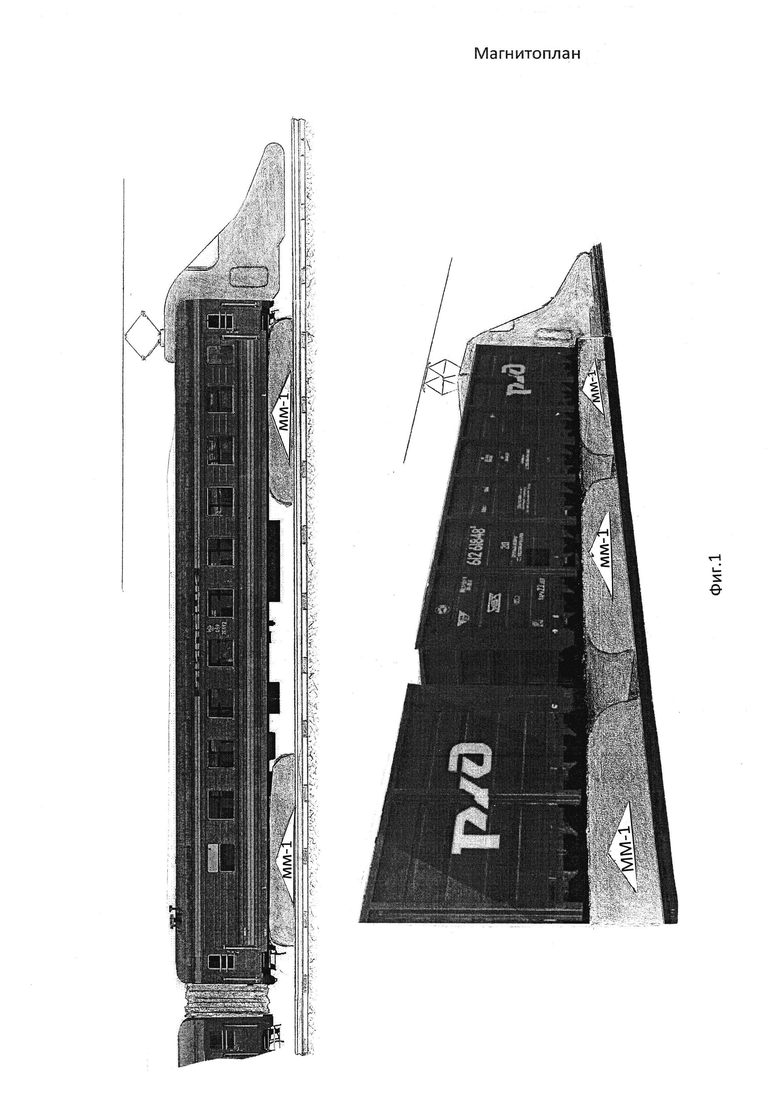
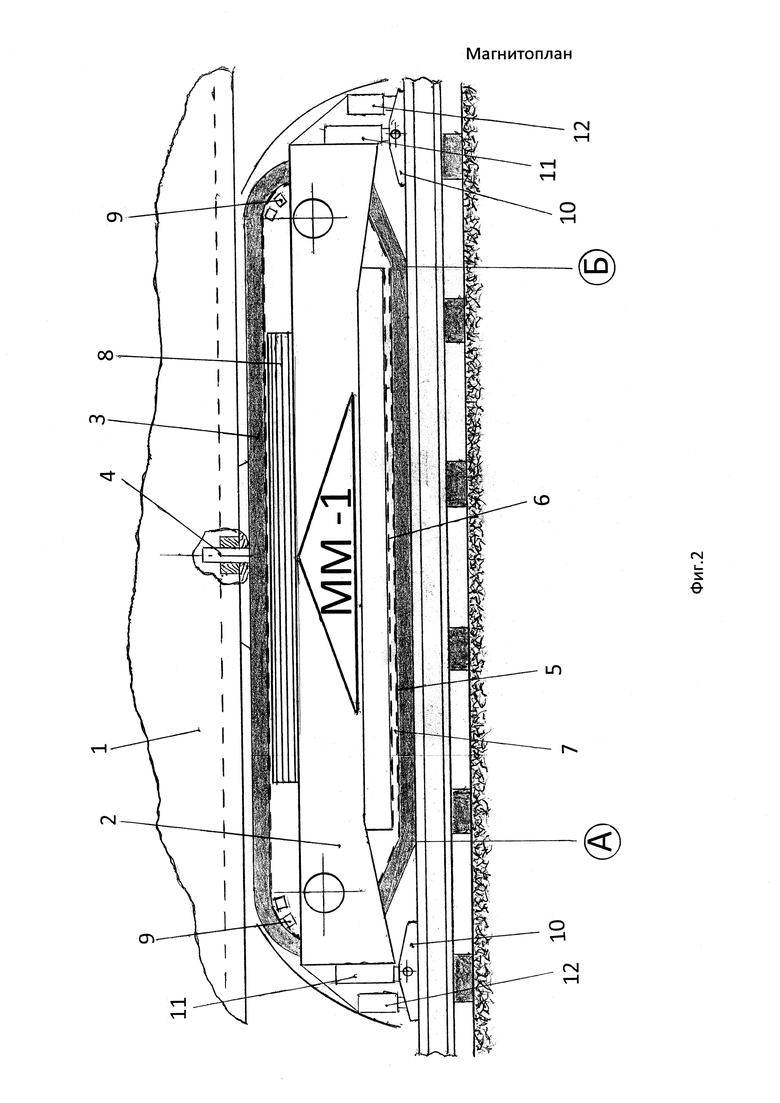
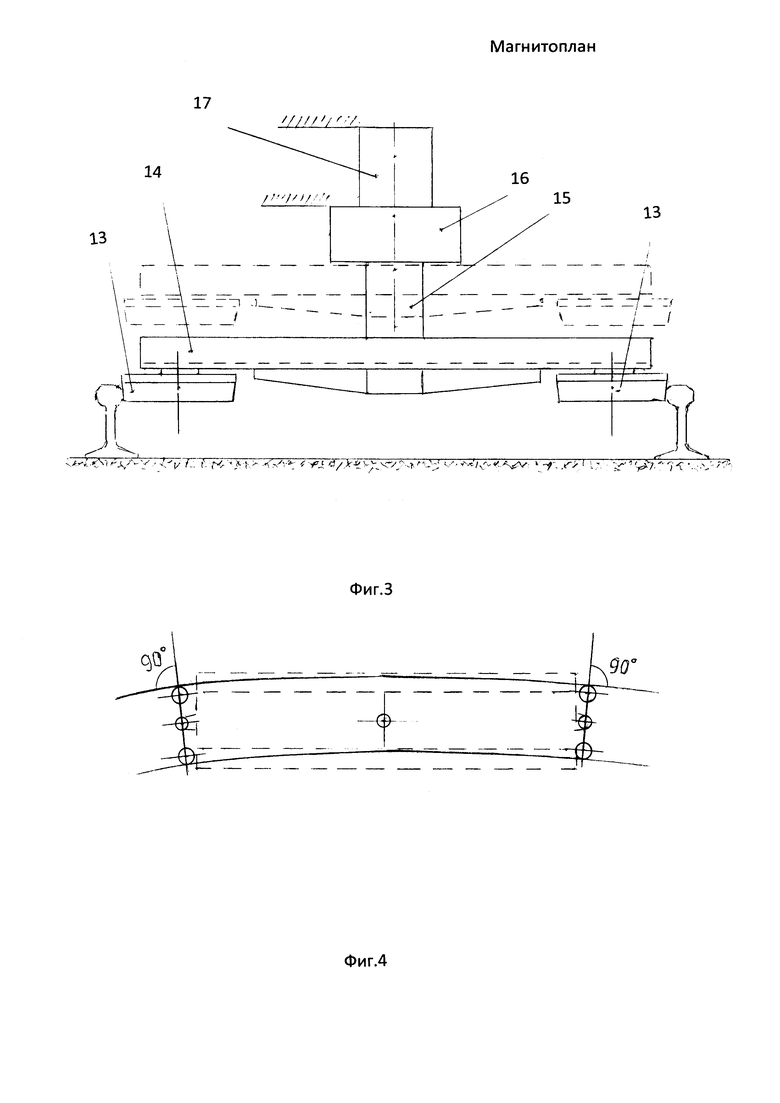
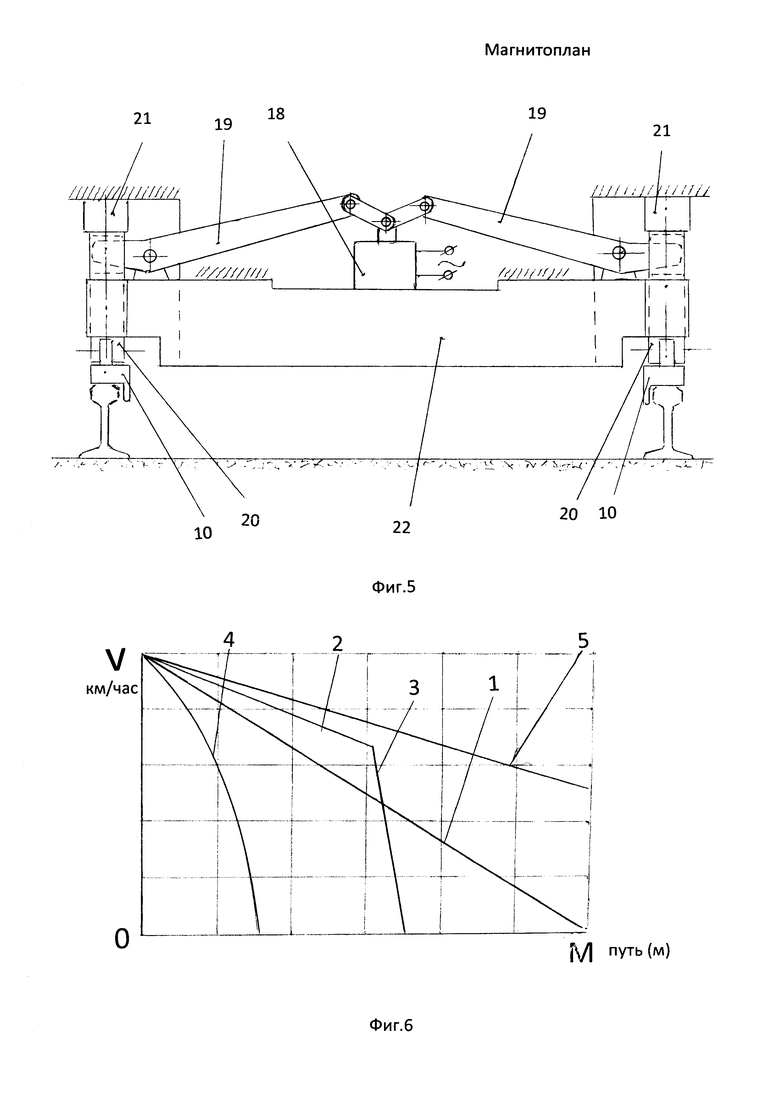
Изобретение поясняется чертежами, где на фиг 1. представлен общий вид магнитоплана пассажирского и грузового; на фиг. 2 - боковой вид тележки; на фиг. 3 - схема конструкции роликового бокового упора; на фиг. 4 представлена схема адаптации роликов бокового упора к рельсам в кривых поворотах; на фиг. 5 - схема привода колодочных тормозов; на фиг. 6 - графики торможения, где V - скорость, М - путь; на фиг. 7 - структурная схема управления магнитопланом.
На фиг. 2 тележка магнитоплана соединяется с вагоном 1 через шкворень 4, установленный на несущей конструкции 2 тележки. Место посадки шкворня 4 в отверстие в раме днища вагона 1 стандартное, предназначенное для соединения тележек существующего железнодорожного подвижного состава. Базовой конструкцией тележек магнитоплана является эластичная гусеница 3, армированная, например, стальными лентами, кевларовыми канатами и цепями. В гусеницу 3 с внутренней стороны вмонтированы по всей длине высокоэнергетические постоянные магниты 5. С нижней стороны несущей конструкции 2 тележки вмонтированы такие же высокоэнергетические постоянные магниты 6. Магниты 5 и 6 одинаковой конструкции установлены навстречу друг другу в гусенице 3 и в несущей конструкции 2 тележки одинаковой полярностью «N-N» или, «S-S». За счет этого на линии А-Б создается зона отталкивания. Силы отталкивания на четырех расстояниях А-Б гусениц двух тележек превышают вес брутто массы вагона с тележками, и за счет этого образуется левитирующее пространство 7. Таким образом, вагон 1 с тележками поднят в воздух и опирается на рельсы через левитирующее пространство 7. Магниты 5 в гусенице 3 и 6 в несущей конструкции 2 тележки на участке А-Б подпружинены (не показаны), что позволяет проходить без аварии участки пути с сезонными морозобойными буграми. В верхней части тележки установлен под гусеницей 3 линейный двигатель 8. С торцевых сторон гусеницы 3 установлены дуговые генераторы 9. Слева и справа на концах тележки установлены тормозные колодки 10 с приводом 11 и ролики бокового упора с приводом 12. Магниты 5 установлены в центральной части ширины гусеницы 3 (не показаны) и передают усилие на рельс через подставки из немагнитного материала. Концы подставок, контактирующие с рельсом, находятся на расстоянии от магнита, где магнитное поле уже равно нулю. Боковые облицовки по всей длине гусеницы 3 находятся на расстоянии от магнитов 5, где заканчивается действие магнитного поля. Линейные двигатели 8 состоят из серии электромагнитов. Дуговые генераторы 9 состоят из электромагнитов, установлены на неподвижных ободах на торцевых участках гусеницы 3 с углом охвата до 180 градусов. Конструкции в непосредственном контакте с постоянными магнитами 5 и 6 выполнены из немагнитных материалов. Низ несущей конструкции 2 тележки находится выше допустимого уровня низа конструкций существующего подвижного состава, для обеспечения прохождения участков пути с контррельсами, верх которых выше УГР (уровня головки рельсов) на 25,5 мм и настила железнодорожных переездов, выше УГР на 40 мм. Тележки удерживаются в железнодорожной колее в поперечном направлении роликами бокового упора 13 (фиг. 3), установленными на бесшумных высокооборотных подшипниках и передающими усилия на головки рельсов внутри колеи. Ролики бокового упора 13 установлены на опорной балке 14, которая базирована на трубе 15 с винтовой резьбой. Труба 15 входит и поворачивается безредукторным электродвигателем 16, который установлен на опорной базовой трубе 17. На криволинейных участках пути ролики бокового упора 13 автоматически устанавливаются по нормали к рельсам (фиг. 4). Тормоза магнитоплана (Фиг. 5) представляют из себя тормозные колодки 10 с ребордами, установленными внутрь колеи.
Управляет тормозами электромагнит 18 через рычаги 19, направляющие 20, жесткие пружины 21 в базовой раме 22.
Нижний габарит рамы 22 обеспечивает проход над контррельсами и настилами железнодорожных переездов. Графики (фиг. 6) показывают возможности системы торможения, где режимы торможения также выполняются и с помощью линейных двигателей. Притормаживание линейными двигателями 8 производится по линии 5, аварийный останов - по кривой 4, нормальное торможение для остановки поезда - по прямой 1 тормозами, совместное притормаживание линейными двигателями 8 и тормозами - по прямой 2, срочное торможение - по прямой 3 тормозами.
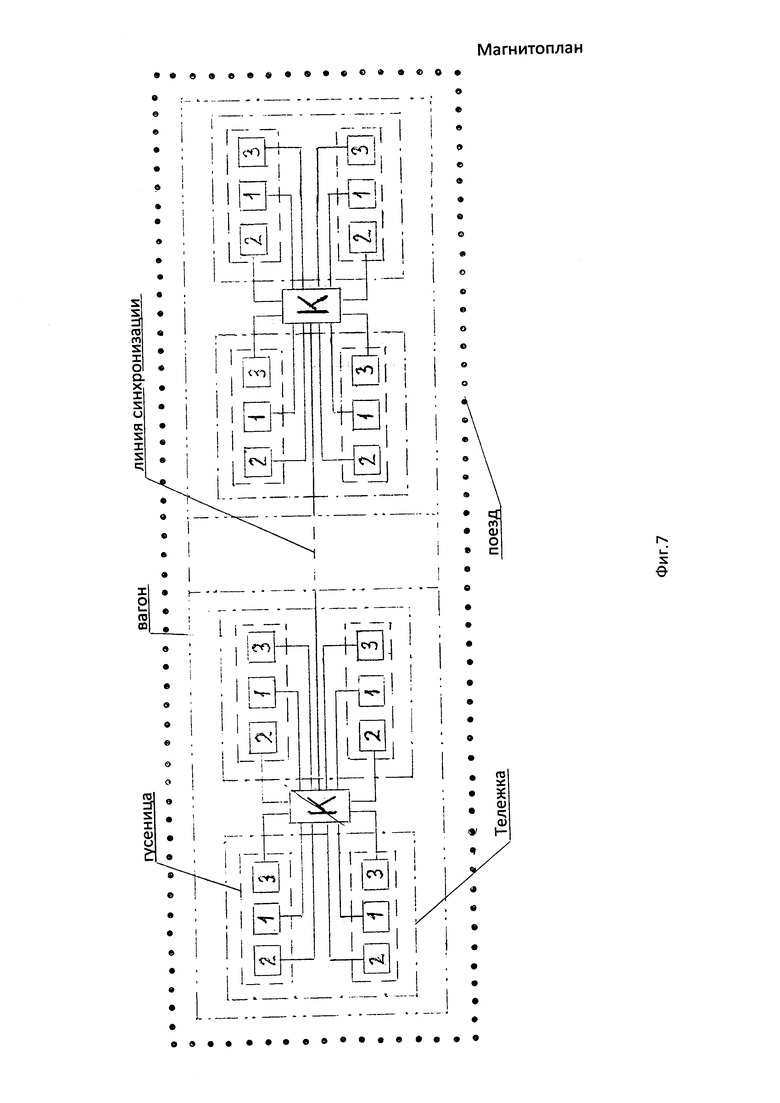
На схеме фиг. 7 линейные двигатели обозначены позицией 1, дуговые генераторы 2 и 3, управляются контроллером К. В вагоне на двух тележках находится четыре линейных двигателя и восемь дуговых генераторов. В поезде может быть один контроллер и линия синхронизации между вагонами.
Конструкция магнитоплана работают следующим образом.
Движение - горизонтальная тяга поднятого в воздух вагона 1 с тележками с несущими конструкциями 2, соединенными шкворнем 4, на левитирующее пространство 7 - 20 мм (фиг. 2), образованное магнитами 5 на эластичной армированной гусенице 3 и магнитами 6 на несущей конструкции 2 тележки, обеспечивается линейными двигателями 8 (на фиг. 7 позиция 1), управляемыми контроллерами К (фиг. 7).
Двигатели обеспечивают реверсивное движение поезда с любой скоростью от нуля до четырехсот километров в час. Ограничение максимальной скорости происходит из-за лобового воздушного сопротивления кабины машиниста. Для уменьшения сопротивления воздуха кабина выполнена обтекаемой формы (фиг. 1). В зависимости от кривизны поворота пути (фиг. 4) автоматически управляющий контроллер К устанавливает такую скорость, при которой в поперечном направлении центробежные силы становятся равны центростремительным, при этом уравниваются усилия на оба рельса уравниваются усилия роликов бокового упора 13 (фиг. 3) поперечного упора на оба рельса. При обеспечении соответствующей дорожной обстановки возможно автоматическое запрограммированное движение без машиниста с компьютерным управлением. Дуговые генераторы 9 тележек магнитоплана (фиг. 2) вырабатывают электроэнергию в режиме рекуперации - возвращают ее в сеть тяговой подстанции. Они используются и для подзарядки бортовых аккумуляторов магнитоплана (не показаны). Высокоэффективные разрабатываемые в настоящее время инновационные аккумуляторы обеспечат питание линейных двигателей длительно при средних скоростях движения и кратковременно при максимальных скоростях без забора электроэнергии из сети тяговой подстанции. Рекуперация электроэнергии обеспечится и линейными двигателями 8, работающими в режиме генераторов, при движении на спусках и при торможения магнитоплана. Привод 12 управляет роликами. Удержание магнитоплана в колее роликами бокового упора 13 (фиг. 3) производится при установке соответствующего зазора между роликами бокового упора 13 и головками рельс. Для этого три четверти толщины роликов бокового упора 13 имеют конусность. Для прохождения участков пути с максимальной кривизной опорная балка 14 (в опорной базовой трубе 17) - носитель роликов бокового упора 13 - в плане автоматически устанавливается по нормали к рельсам (фиг. 4). За счет этого базовая длина тележек не лимитирована, это исключает износ рельсов и исключает линейные сопротивления. Для обеспечения прохождения участков пути с препятствиями выше УГР ролики бокового упора 13 поднимаются выше уровня этих препятствий (фиг. 3). Контррельсы присутствуют при стрелочных переводах, поэтому при командах диспетчеров движения на перевод является сигналом на подъем роликов бокового упора 13. При подъезде к переездам пути присутствуют на расстоянии до 800 метров стойки с сигналом «С». Это служит также командой на подъем роликов бокового упора 13. Удержание магнитоплана в колее при этих случаях происходит за счет реборд тормозных колодок 10. Зазор «ролики-рельсы» меньше, чем зазор «реборды тормозных колодок-рельсы», за счет этого в главных длительных участков пути исключается несанкционированное трение тормозных колодок 10 о рельсы. Привод 11 тормозов (Фиг. 2) обеспечивает режимы «притормаживание» и «аварийного торможения», выполняются электромагнитом 18 (фиг. 5) с соответствующим уровнем питающего напряжения. При отключенном напряжении рычаги 19 направляющими 20 базовой рамы 22 под действием жестких пружин 21 прижимают тормозные колодки 10 к рельсам, обеспечивая режим стоянки поезда или экстренного торможения. Растормаживание выполняется через рычаги 19. Режимы торможения также выполняются и с помощью линейных двигателей (фиг. 6). Притормаживание линейными двигателями производится по линии 5, аварийный останов - по кривой 4, нормальное торможение для остановки поезда - по прямой 1 тормозами, совместное притормаживание линейными двигателями и тормозами - по прямой 2, срочное торможение - по прямой 3 тормозами.
Преимущества предложенного технического решения заключаются в следующем:
- магнитоплан использует стандартный железнодорожный путь и стандартные вагоны;
- оказывает не сосредоточенную нагрузку на рельсы, как у существующей конструкции «рельс-колесо», а распределенную нагрузку, которая не разрушает рельсовый путь;
- снижает в несколько раз сопротивление движению поезда, а также потребление электроэнергии из сети тяговой подстанции.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного магнитоплана, отсутствуют. Следовательно, заявленное техническое решение соответствует условию патентоспособности «новизна».
Результаты поиска известных решений в данной области техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого технического решения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками из заявляемого технического решения преобразований на достижение указанного технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕЖКА СКОРОСТНОГО ГРУЗОВОГО ВАГОНА В.В. БОДРОВА | 2015 |
|
RU2602006C2 |
| ЗАЖИМНОЙ ТОРМОЗ В.В. БОДРОВА | 2015 |
|
RU2600407C2 |
| ПОДАВИТЕЛЬ ВИЛЯНИЯ ТЕЛЕЖКИ ГРУЗОВОГО ВАГОНА - АНТИВИЛ В.В. БОДРОВА | 2015 |
|
RU2590756C2 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
| РАДИАЛЬНАЯ СВАРНАЯ ТЕЛЕЖКА | 2013 |
|
RU2563711C2 |
| ДВУХОСНАЯ ТЕЛЕЖКА ГРУЗОВОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2228869C1 |
| Устройство для сцепления с рельсом железнодорожной техники (варианты) | 2024 |
|
RU2836497C1 |
| УСТРОЙСТВО СПАСЕНИЯ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498914C1 |
| Длиннобазовая железнодорожная вагон-платформа для перевозки крупнотоннажных контейнеров | 2020 |
|
RU2754932C1 |
| ДОПОЛНИТЕЛЬНАЯ ТОРМОЗНАЯ СИСТЕМА ДЛИТЕЛЬНОГО ДЕЙСТВИЯ | 2017 |
|
RU2667431C1 |
Изобретение относится к магнитным подвескам для транспортных средств. Магнитоплан содержит пассажирские и грузовые вагоны на левитирующих тележках на базе армированных эластичных гусениц. На гусеницах установлены по всей длине высокоэнергетические постоянные магниты, левитирующие с такими же магнитами в несущей конструкции тележки. На тележке установлены линейные двигатели, ролики бокового упора и тормозные колодки. Технический результат изобретения заключается в создании надежного скоростного железнодорожного транспорта. 12 з.п. ф-лы, 7 ил.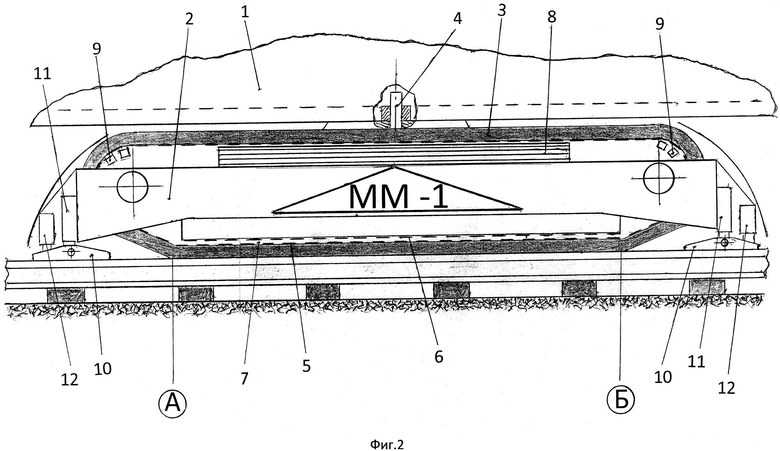
1. Магнитоплан, включающий вагоны, высокоэнергетические постоянные магниты, отличающийся тем, что стандартные пассажирские и грузовые вагоны левитируют по существующим рельсовым путям на левитирующих тележках, выполненных на базе армированных эластичных гусениц с установленными по всей длине высокоэнергетическими постоянными магнитами, левитирующими с такими же магнитами в несущей конструкции тележки, в которой установлены линейные двигатели, а также ролики бокового упора и тормозные колодки.
2. Магнитоплан по п. 1, отличающийся тем, что тележки устанавливают на рельсы с упором на армированные эластичные гусеницы через левитирующее пространство.
3. Магнитоплан по п. 1, отличающийся тем, что несущая конструкция тележки установлена шкворнем в существующее отверстие в раме днища вагона.
4. Магнитоплан по п. 1, отличающийся тем, что тележки могут поворачиваться относительно продольной оси вагона.
5. Магнитоплан по п. 1, отличающийся тем, что удержание поезда в колее производится роликами бокового упора в горизонтальной плоскости с упором их в головки рельс.
6. Магнитоплан по п. 1, отличающийся тем, что при прохождения препятствий выше уровня головки рельс удержание в колее производят реборды тормозных колодок.
7. Магнитоплан по п. 1, отличающийся тем, что армирование эластичных гусениц может быть выполнено стальными лентами, кевларовыми канатами и цепями.
8. Магнитоплан по п. 1, отличающийся тем, что высокоэнергетические постоянные магниты одинаковой конструкции установлены навстречу друг другу в гусенице и несущей конструкции тележки одинаковой полярностью «N-N» или «S-S».
9. Магнитоплан по п. 1, отличающийся тем, что в несущей конструкции тележки высокоэнергетические постоянные магниты подпружинены.
10. Магнитоплан по п. 1, отличающийся тем, что со стороны торцевых поверхностей гусениц на несущей конструкции тележки расположены дуговые генераторы с углом охвата до 180 градусов.
11. Магнитоплан по п. 1, отличающийся тем, что дуговые генераторы установлены на несущей конструкции тележки по два на гусеницу с торцевых ее участков.
12. Магнитоплан по п. 1, отличающийся тем, что дуговые генераторы используются для зарядки бортовых аккумуляторов,
13. Магнитоплан по п. 1, отличающийся тем, что линейные двигатели тележек, осуществляющие тягу, и дуговые генераторы управляются контроллерами.
| JP H07143614 A, 02.06.1995 | |||
| Способ получения пищевого пепсина из слизистой оболочки сычугов крупного рогатого скота | 1948 |
|
SU91540A1 |
| JP H09248385 A, 22.09.1997 | |||
| ЭЛЕКТРИЧЕСКОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2478048C1 |

