Изобретение относится к области наведения беспилотных планирующих летательных аппаратов (БПЛА) и может быть использовано при создании и эксплуатации таких летательных аппаратов.
Наиболее близким к данному изобретению является описанный способ управления движением БПЛА, базирующийся на следующих основных положениях:
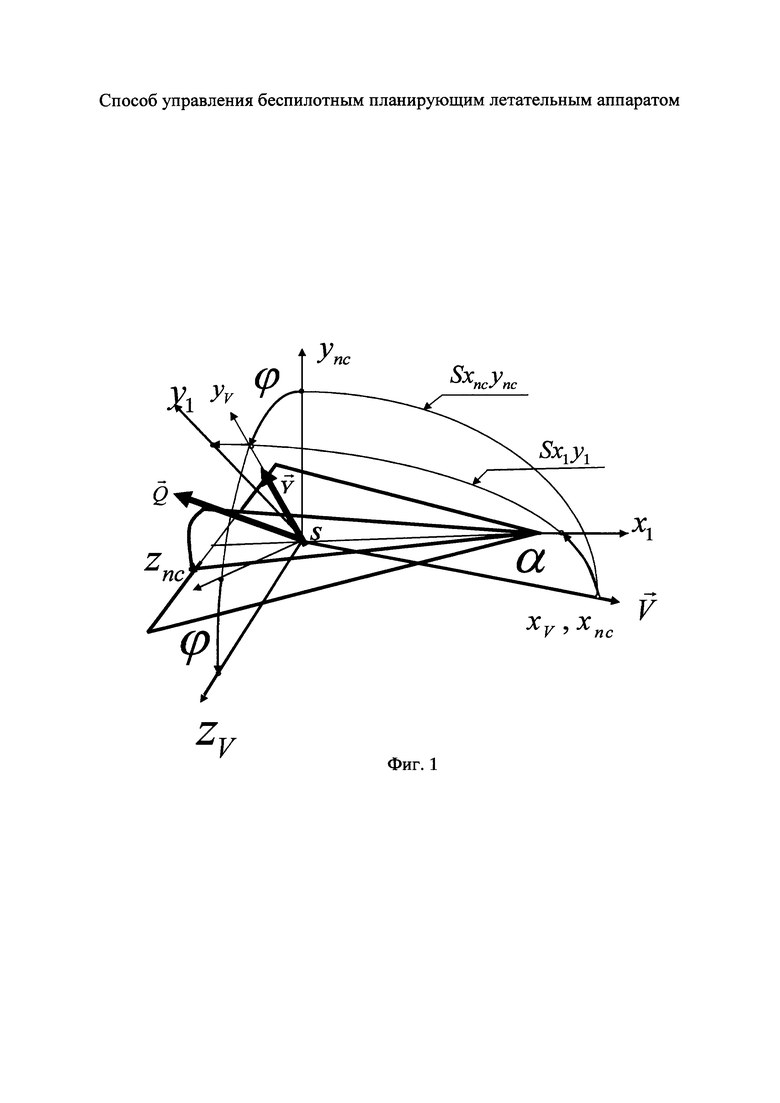
1. БПЛА движется в высоких слоях атмосферы с большой начальной скоростью, обладает существенным аэродинамическим качеством и возможностью автономного управления величиной и направлением аэродинамической подъемной силы путем целенаправленного изменения угла аэродинамического крена ϕ и угла атаки α. На фиг. 1 представлена схема БПЛА с действующими на нее аэродинамическими силами: подъемной силой  и силой лобового сопротивления
и силой лобового сопротивления  , а также показана схема введения угла аэродинамического крена ϕ и угла атаки α с использованием связанной с БПЛА - Sx1y1z1, скоростной - SxVyVzV и полускоростной -
, а также показана схема введения угла аэродинамического крена ϕ и угла атаки α с использованием связанной с БПЛА - Sx1y1z1, скоростной - SxVyVzV и полускоростной -  систем координат.
систем координат.
2. Управление БПЛА заключается в последовательном наведении на каждую из совокупности опорных точек траектории Mj (j=1, …, N), заданной геодезическими координатами Bj, Lj, Hj, и направлений их пролета, заданных углами азимута Aj и наклона к местным горизонтам θj.
3. Наведение БПЛА осуществляется с использованием терминального метода наведения «по требуемому ускорению» [1], который включает решение краевой задачи наведения с целью определения требуемого ускорения, обеспечивающего перевод БПЛА из текущего положения в требуемое конечное, задаваемое в каждой очередной опорной точке траектории. Требуемое ускорение как функция времени движения на оставшейся части пути к опорной точке определяется для управления движением БПЛА в поперечном направлении и реализуется путем придания БПЛА соответствующих значений угла аэродинамического крена  и угла атаки
и угла атаки  . Движение в продольном направлении осуществляется по инерции. Определение и реализация величин углов
. Движение в продольном направлении осуществляется по инерции. Определение и реализация величин углов  и
и  осуществляются в каждом цикле наведения Tцн, измеряемом долями секунды, в течение всего времени движения БПЛА к очередной точке наведения.
осуществляются в каждом цикле наведения Tцн, измеряемом долями секунды, в течение всего времени движения БПЛА к очередной точке наведения.
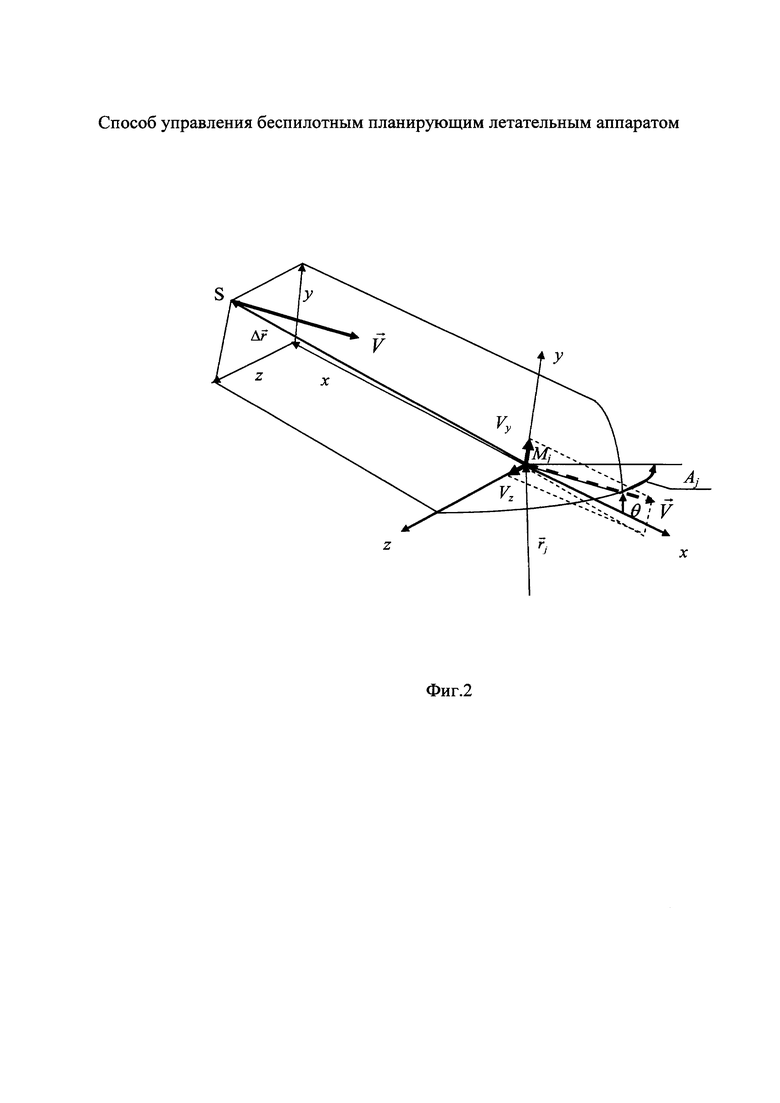
Краевая задача наведения предполагает выбор целевой системы координат, в которой задаются уравнения движения БПЛА и краевые условия. В прототипе в качестве целевой выбрана прямоугольная система координат Mjxyz с началом в опорной точке Mj, осью Mjx, ориентированной азимутом Aj и углом наклона траектории θj, осью Mjz в плоскости местного горизонта и осью Mjy, дополняющей систему координат до правой (фиг. 2). Предполагается, что текущие параметры движения БПЛА - r(t), V(t) - в реальном полете определяются бортовой навигационной системой, а при компьютерном моделировании полета БПЛА - из интегрирования системы дифференциальных уравнений, описывающей движение БПЛА. Пусть, например, известны значения текущих параметров движения БПЛА  в гринвичской геоцентрической относительной системе координат Oξηζ. Из полетного задания известны геодезические координаты опорных точек Mj, преобразуемые в систему координат
в гринвичской геоцентрической относительной системе координат Oξηζ. Из полетного задания известны геодезические координаты опорных точек Mj, преобразуемые в систему координат 

Система уравнений движения БПЛА в целевой системе координат Mjxyz при допущении о безынерционном выполнении задаваемых управляющих команд в векторной форме имеет вид:

где кажущееся ускорение БПЛА от суммарной аэродинамической силы разделено на «полезную» часть  - требуемое управляющее ускорение и «вредную» часть
- требуемое управляющее ускорение и «вредную» часть  - ускорение от силы сопротивления движению БПЛА;
- ускорение от силы сопротивления движению БПЛА;  - ускорение от силы притяжения Земли в точке Mj.
- ускорение от силы притяжения Земли в точке Mj.
4. Краевые условия задачи наведения в системе координат Mjxyz задаются в следующем виде:
- в текущей точке траектории или на «левом» конце краевой задачи наведения

где 

а матрицы направляющих косинусов -  и
и  , связывающие относительную геоцентрическую гринвичскую систему координат Oξηζ с целевой Mjxyz, легко определяются, поскольку известны углы Bj, Aj и θj.
, связывающие относительную геоцентрическую гринвичскую систему координат Oξηζ с целевой Mjxyz, легко определяются, поскольку известны углы Bj, Aj и θj.
Краевые условия в конечной точке траектории или на «правом» конце краевой задачи наведения имеют вид:

Время движения БПЛА на оставшейся части пути к точке наведения T прогнозируется в каждом цикле наведения Tцн с использованием гипотезы о равномерном прямолинейном движении БПЛА на оставшейся части пути:

В краевой задаче требуется на временном интервале [t, tк]=[0≤τ≤T] определить вектор - функцию  , удовлетворяющую краевым условиям (2) и ограничению на величину угла атаки, заданную соотношением:
, удовлетворяющую краевым условиям (2) и ограничению на величину угла атаки, заданную соотношением:

Решение краевой задачи в аналитическом виде в прототипе получено при представлении требуемого ускорения в форме простой интегрируемой функции - временного полинома первого порядка:

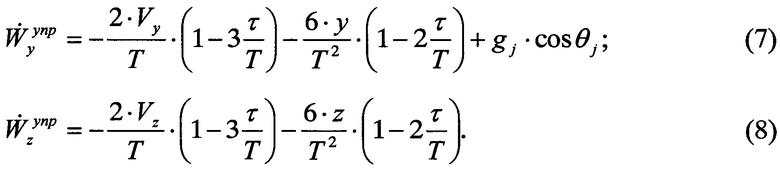
При допущениях, что поле притяжения Земли на участке сближения БПЛА с точкой наведения принимается однородным, а ускорение силы притяжения - равным ускорению в точке Mj-g(r), и неучете вращения Земли, система уравнений (1) декомпозируется на три независимых подсистемы, из которых «полезные» компоненты ускорения определяются в виде проекций вектор-функции (6) на оси Mjy и Mjz целевой системы координат Mjxyz:
оптимальному по затратам энергии (или - для планирующего ЛА - по потерям скорости движения) управлению ЛА при наведении его на цель. Представим их в виде:
где значения коэффициентов A(y), B(y), A(z), B(z) на любой момент времени из интервала [0≤τ≤T] определяются после интегрирования упомянутых подсистем уравнений с краевыми условиями (2) и (3). В результате определяются программы изменения управляющих ускорений в виде:
Преобразование требуемых ускорений из вида (7), (8) к виду, реализуемому органами управления БПЛА, осуществляется следующим образом. Сначала требуемые ускорения преобразуются в полускоростную систему координат:
где матрица  , связывающая целевую систему координат с полускоростной, имеет вид:
, связывающая целевую систему координат с полускоростной, имеет вид:
а требуемое значение угла аэродинамического крена  на момент τ, в качестве которого задается момент из очередного цикла наведения Tцн, например
на момент τ, в качестве которого задается момент из очередного цикла наведения Tцн, например  , рассчитывается по формуле:
, рассчитывается по формуле:

Требуемое значение угла атаки определяется после определения проекций требуемого ускорения в скоростной системе координат:
где матрица, связывающая полускоростную систему координат со скоростной системой координат, имеет вид:

Однако сначала из выражения

в котором левая часть определена по формуле (12), а в правой части известны значения массы m и характерной площади крыла  БПЛА, значения скорости V, высоты полета H и соответствующей плотности атмосферы ρ, определяется требуемое значение коэффициента подъемной силы
БПЛА, значения скорости V, высоты полета H и соответствующей плотности атмосферы ρ, определяется требуемое значение коэффициента подъемной силы  .
.
Требуемое значение угла атаки  определяется с помощью таблиц, представляющих зависимость аэродинамических коэффициентов от высоты H, числа Маха M и угла атаки α. По известным значениям
определяется с помощью таблиц, представляющих зависимость аэродинамических коэффициентов от высоты H, числа Маха M и угла атаки α. По известным значениям  , H, M методом итераций определяется требуемое значение угла атаки
, H, M методом итераций определяется требуемое значение угла атаки  . По другой таблице определяется соответственно значение аэродинамического коэффициента силы лобового сопротивления
. По другой таблице определяется соответственно значение аэродинамического коэффициента силы лобового сопротивления  ,
,  , используемого при математическом моделировании движения БПЛА.
, используемого при математическом моделировании движения БПЛА.
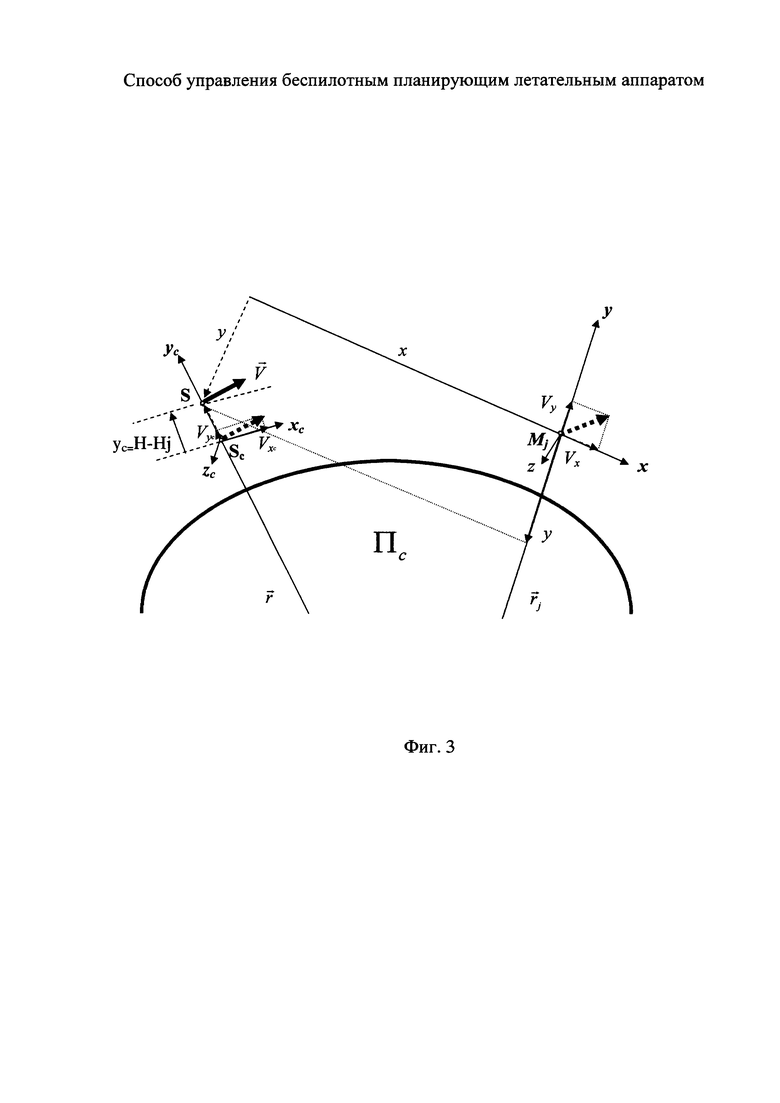
Недостатком ближайшего аналога является его непригодность для управления БПЛА на больших - порядка нескольких тысяч километров - расстояниях от точки наведения. Причиной этому является зависимость величин параметров y, z, Vy, Vz, служащих краевыми условиями в краевой задаче наведения, от положения летательного аппарата в целевой системе координат. На больших удалениях от начала системы координат (фиг. 3) из-за кривизны траектории БПЛА параметры y, z, Vy, Vz принимают очень большие значения и, как следствие (см. формулы (7), (8)), становятся большими значения требуемых ускорений  ,
,  и соответственно значение требуемого угла атаки .
и соответственно значение требуемого угла атаки .
В результате условие (5) не выполняется и управление движением БПЛА осуществляется на большей части маршрута при значениях  . А это приводит к существенным потерям скорости движения из-за сопротивления атмосферы.
. А это приводит к существенным потерям скорости движения из-за сопротивления атмосферы.
Задачей предлагаемого изобретения является устранение указанного недостатка в бортовом алгоритме наведения БПЛА.
Технический результат достигается тем, что в каждом цикле наведения на каждую опорную точку траектории решают краевую задачу наведения, полученные компоненты требуемого ускорения преобразуют в полускоростную и в скоростную системы координат и с их помощью определяют требуемые значения угла аэродинамического крена и угла атаки, краевую задачу наведения решают в сопровождающей системе координат с началом на текущем радиус-векторе центра масс БПЛА на высоте, равной высоте очередной опорной точки траектории.
За счет применения в качестве целевой системы координат в краевой задаче наведения сопровождающей системы координат, в которой краевые условия на левом конце определяются и всегда остаются малыми, требуемые значения ускорения и угла атаки во все время наведения на опорные точки траектории остаются малыми и малыми оказываются потери скорости БПЛА из-за сопротивления атмосферы.
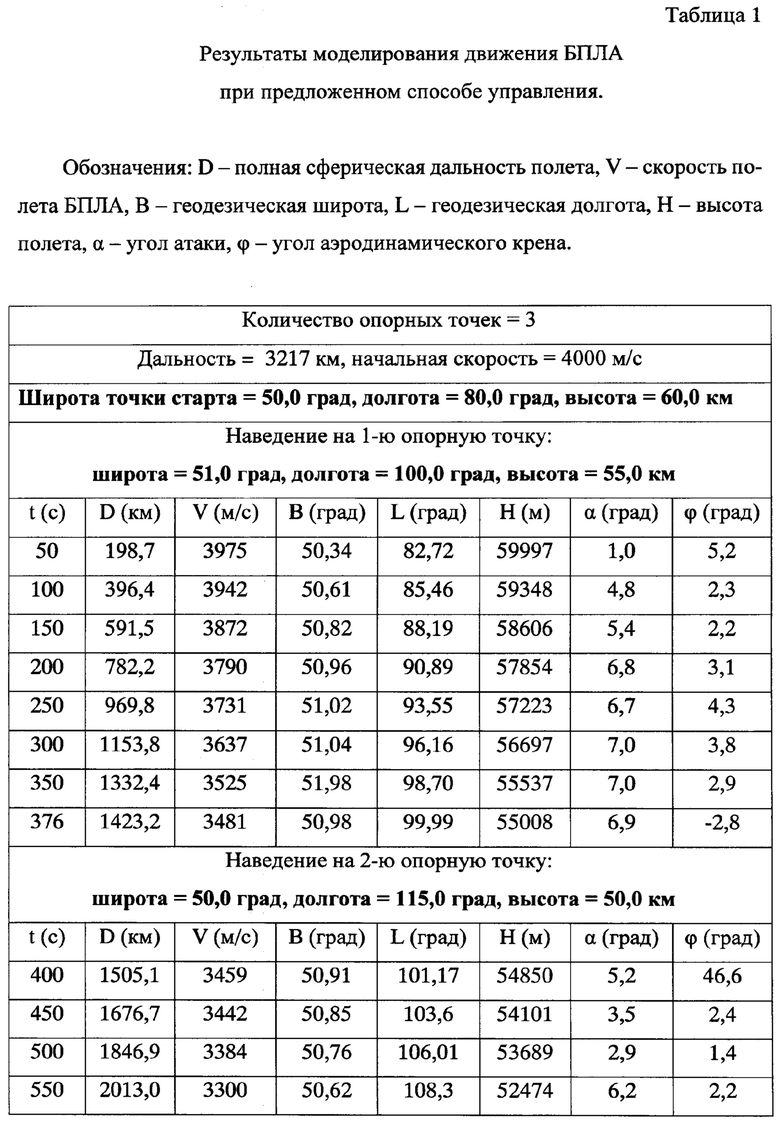
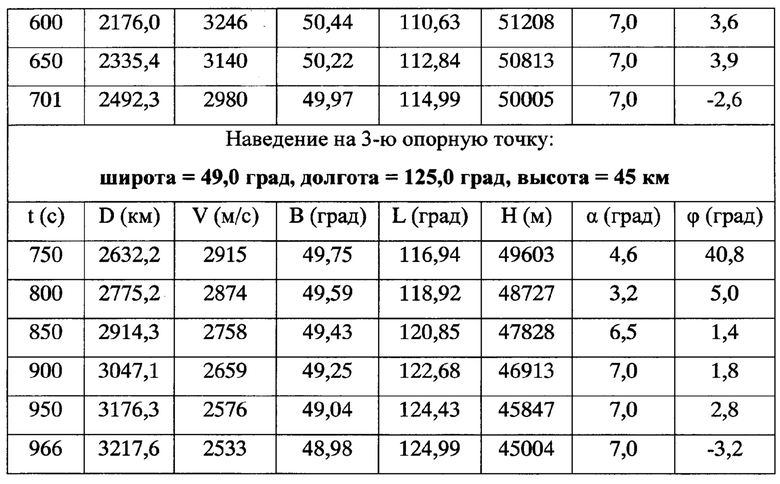
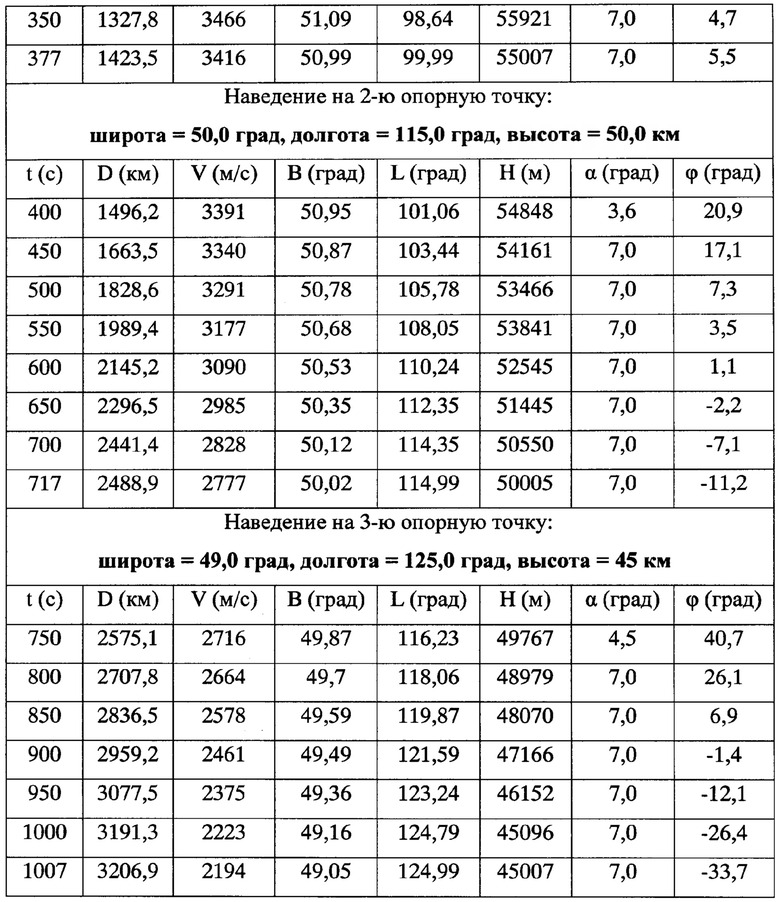
Сущность изобретения поясняется приведенным ниже описанием, фиг. 1-3 и подтверждается примером моделирования траектории БЛА при реализации ближайшего способа и предложенного способа управления в таблицах 1, 2.
Суть предлагаемого способа управления БПЛА та же, что и в ближайшем аналоге, только в качестве целевой системы координат, в которой задаются краевые условия и решается краевая задача, выбирается так называемая сопровождающая системы координат Scxcyczc (фиг. 3) с началом на радиус-векторе центра масс БПЛА в точке Sc, высота которой постоянна и равна высоте очередной точки наведения:

Ось Scyc системы Scxcyczc направлена вдоль радиус-вектора  от центра масс БПЛА - точки S; ось Sczc - по нормали к плоскости Пс, образуемой двумя радиус-векторами -
от центра масс БПЛА - точки S; ось Sczc - по нормали к плоскости Пс, образуемой двумя радиус-векторами -  и
и  , исходящими из центра Земли. Ось Scxc дополняет целевую систему координат до правой.
, исходящими из центра Земли. Ось Scxc дополняет целевую систему координат до правой.
Модель движения БПЛА в краевой задаче наведения на точку Mj в системе координат Scxcyczc по форме не отличается от модели (1), но теперь уравнения движения интегрируются при других краевых условиях:
на левом конце - 
на правом конце - 
На фиг. 3 показано различие величин краевых условий в краевых задачах наведения в одной и той же текущей точке траектории БПЛА в двух описываемых способах управления движением БПЛА.
Координата yc определяется бортовой навигационной системой в виде  , а координата zc=0.
, а координата zc=0.
Проекции вектора скорости на оси системы координат Scxcyczc определяются по формуле:

где матрица направляющих косинусов, связывающая относительную геоцентрическую гринвичскую систему координат с текущей сопровождающей системой координат, определяется в каждом цикле наведения в виде:

где 
где  , и входящие в выражения (19) векторы и их модули известны из полетного задания и навигационных измерений.
, и входящие в выражения (19) векторы и их модули известны из полетного задания и навигационных измерений.
Необходимо отметить, что при сближении БПЛА с каждой опорной точкой значение центрального угла Фj между векторами  и
и  стремится к нулю и, как следствие, система координат Scxcyczc (см. формулы (19)) вырождается. Аналогично вырождаются и величины
стремится к нулю и, как следствие, система координат Scxcyczc (см. формулы (19)) вырождается. Аналогично вырождаются и величины  (смотри формулы (7), (8)) при T→0. Выходом из этих ситуаций служит «замораживание» расчета направления орта
(смотри формулы (7), (8)) при T→0. Выходом из этих ситуаций служит «замораживание» расчета направления орта  при достижении в процессе наведения выполнения условия Фj≤Фmin - минимально допустимого значения угла, а во втором случае - при достижении условия T≤Tцн - продолжительности цикла наведения.
при достижении в процессе наведения выполнения условия Фj≤Фmin - минимально допустимого значения угла, а во втором случае - при достижении условия T≤Tцн - продолжительности цикла наведения.
Значения проекций требуемого ускорения на оси целевой системы координат Scxcyczc теперь имеют вид:
Далее алгоритм определения требуемых значений управляющих параметров - угла аэродинамического крена  и угла атаки
и угла атаки  - не отличается от алгоритма описанного выше способа-прототипа. По формулам вида (9), (10), (11), в которых в качестве проекций вектора скорости БПЛА вместо проекций на оси системы координат Mjxyz используются одноименные проекции скорости на оси сопровождающей системы координат Scxcyczc, определяются требуемые значения ускорений в полускоростной системе координат и требуемое значение угла аэродинамического крена
- не отличается от алгоритма описанного выше способа-прототипа. По формулам вида (9), (10), (11), в которых в качестве проекций вектора скорости БПЛА вместо проекций на оси системы координат Mjxyz используются одноименные проекции скорости на оси сопровождающей системы координат Scxcyczc, определяются требуемые значения ускорений в полускоростной системе координат и требуемое значение угла аэродинамического крена  . Далее по формулам, аналогичным формулам (12), (13), рассчитывается проекция требуемого ускорения на ось Syν скоростной системы координат и определяется требуемое значение аэродинамического коэффициента подъемной силы
. Далее по формулам, аналогичным формулам (12), (13), рассчитывается проекция требуемого ускорения на ось Syν скоростной системы координат и определяется требуемое значение аэродинамического коэффициента подъемной силы  .
.
Далее с помощью таблиц определяется требуемое значение угла атаки  .
.
На фиг. 3 представлена схема, иллюстрирующая различия величин текущих параметров движения БПЛА, используемых при решении краевой задачи наведения в двух описанных выше целевых системах координат в качестве краевых условий. Из приведенной схемы видно, что величины y и Vу, определяемые в системе координат Mjxyz, при больших расстояниях текущей точки траектории S от точки Mj существенно больше (по модулю) величин yc и  из-за влияния кривизны траектории на участке движения БПЛА к точке Mj. Следовательно, величины проекций требуемого ускорения в сопровождающей системе координат, вычисляемые по формулам (19), (20), окажутся значительно меньше, чем вычисляемые по формулам (7), (8) в целевой системе координат Mjxyz. Далее цепочки вычислений по двум описанным алгоритмам приводят к существенно различным значениям требуемого угла атаки и, как следствие, к существенно различным величинам силы лобового сопротивления атмосферы. В результате при использовании в краевой задаче сопровождающей системы координат в качестве целевой системы координат уменьшаются потери скорости, увеличивается располагаемая дальность полета БПЛА.
из-за влияния кривизны траектории на участке движения БПЛА к точке Mj. Следовательно, величины проекций требуемого ускорения в сопровождающей системе координат, вычисляемые по формулам (19), (20), окажутся значительно меньше, чем вычисляемые по формулам (7), (8) в целевой системе координат Mjxyz. Далее цепочки вычислений по двум описанным алгоритмам приводят к существенно различным значениям требуемого угла атаки и, как следствие, к существенно различным величинам силы лобового сопротивления атмосферы. В результате при использовании в краевой задаче сопровождающей системы координат в качестве целевой системы координат уменьшаются потери скорости, увеличивается располагаемая дальность полета БПЛА.
Кроме того, при планировании маршрутов БПЛА большой протяженности количество опорных точек, включаемых в состав данных полетного задания, сводится к минимуму и определяется только конфигурацией маршрута. При этом нет необходимости кроме координат опорных точек задавать требуемые значения азимутов и углов наклона траектории, так как требуемые направления движения БПЛА после пролета опорных точек задаются направлением первой оси сопровождающей системы координат.
В таблице 1, 2 представлены результаты моделирования движения БПЛА при двух описанных выше способах управления на одном и том же участке пути при одних и тех же начальных условиях.

Источник информации
1. Горченко Л.Д. Метод терминального наведения по требуемому ускорению аэродинамически управляемых летательных аппаратов. Журнал «Полет», №6, М.: Машиностроение, 1999, с 21-24.
Изобретение относится к способу управления планирующим беспилотным летательным аппаратом (БПЛА). Для управления БПЛА в каждом цикле наведения на каждую опорную точку решают краевую задачу наведения в сопровождающей системе координат с началом на текущем радиус-векторе центра масс БПЛА на высоте, равной высоте очередной опорной точки траектории, преобразуют полученные компоненты требуемого ускорения в скоростную и полускоростную системы координат, определяют требуемые значения угла аэродинамического крена и угла атаки. Обеспечивается управление БПЛА на больших расстояниях от точки наведения. 3 ил., 2 табл. 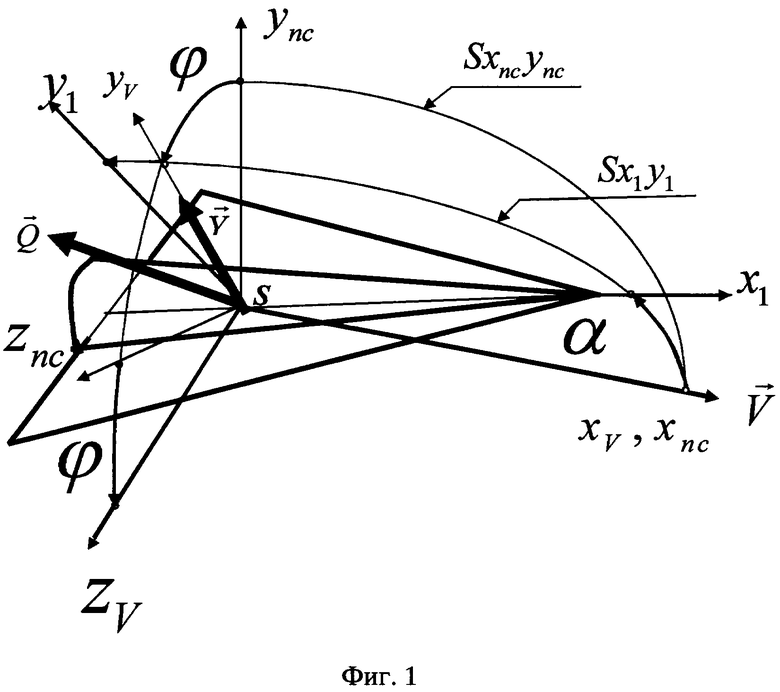
Способ управления беспилотным планирующим летательным аппаратом, заключающийся в том, что в каждом цикле наведения на каждую опорную точку траектории решают краевую задачу наведения, полученные компоненты требуемого ускорения преобразуют в полускоростную и в скоростную системы координат и с их помощью определяют требуемые значения угла аэродинамического крена и угла атаки, отличающийся тем, что краевую задачу наведения решают в сопровождающей системе координат с началом на текущем радиус-векторе центра масс беспилотного планирующего летательного аппарата на высоте, равной высоте очередной опорной точки траектории.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
| СПОСОБ ФОРМИРОВАНИЯ МАНЕВРОВ ПРОИЗВОЛЬНОЙ КОНФИГУРАЦИИ НА КОНЕЧНОМ УЧАСТКЕ ТРАЕКТОРИИ ПЛАНИРУЮЩЕГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2554568C2 |
| US 20160104382 A1, 14.04.2016 | |||
| US 8038062 B2, 18.10.2011 | |||
| US 8103398 B2, 24.01.2012. | |||

