Изобретение относится к области наведения беспилотных планирующих летательных аппаратов (БПЛА) и может быть использовано при эксплуатации таких летательных аппаратов.
Наиболее близким к данному изобретению является «Способ управления беспилотным планирующим летательным аппаратом» (RU 2654238, 2018), базирующийся на следующих основных положениях:
1. БПЛА обладает возможностью автономного управления величиной и направлением аэродинамической подъемной силы путем целенаправленного изменения угла аэродинамического крена ϕ и угла атаки α.
2. Движение БПЛА по маршруту, заданному совокупностью опорных точек Mj (j = 1, …, N), осуществляется последовательным наведением на эти точки.
Маршрут БПЛА выбирается на карте земной поверхности в местах, где по каким-либо причинам требуется изменение направления движения БПЛА, и задается опорными точками маршрута в виде совокупности геодезических координат Bj, Lj. В соответствии с общей протяженностью маршрута определяются начальные условия (начальные значения скорости V0 и высоты H0), в функции удаленности от начальной точки вычисляются высоты промежуточных опорных точек Hj.
Перед полетом сформированный маршрут и соответствующая ему опорная траектория проверяются на возможность реализации, т.е. на удовлетворение всем техническим ограничениям, и прежде всего, по поперечным перегрузкам. Контроль реализуемости заданных опорных траекторий летательных аппаратов осуществляется методом компьютерного моделирования полета. Моделированием полета БПЛА с управлением по методу, описанному в аналоге, можно осуществить контроль реализуемости заданного маршрута, но только до той опорной точки, в которой обнаружится невыполнение ограничений. Наведение на следующую опорную точку срывается и требуется изменить заданный маршрут и проверить его снова на реализуемость. Как корректировать маршрут способ-аналог не определяет. Если на маршруте несколько проблемных опорных точек, процесс контроля реализуемости маршрута затягивается, поскольку его коррекцию приходится осуществлять «методом проб и ошибок».
Задачей предлагаемого изобретения является внесение в процесс контроля реализуемости маршрута БПЛА изменений, которые позволят провести коррекцию формируемого маршрута БПЛА при невыполнении технических ограничений в опорных точках.
Технический результат достигается тем, что маршрут БПЛА задают опорными точками в виде совокупности геодезических координат, при формировании маршрута БПЛА в опорных точках определяют величины углов поворота и, если при сравнении с допустимыми значениями заблаговременно установленных и заданных таблично в функции дальности полета углов обнаруживают различие, обуславливающее нарушение заданных технических ограничений на управляющие параметры БПЛА, то по правилам сферической тригонометрии итерационно смещают проблемную опорную точку на малые расстояния с уменьшением величины угла поворота маршрута до допустимого значения.
Коррекция формируемой конфигурации маршрута БПЛА включает в себя следующие операции:
1. Заблаговременно, на этапе баллистического проектирования БПЛА с помощью многократного моделирования типовых траекторий (с начальными условиями - заданными значениями высоты и скорости  ,
,  ) при экстремальных значениях управляющих поперечных перегрузок определяется зависимость допустимых углов поворота траектории от удаленности БПЛА от начальной точки траектории. Составляются таблицы вида (таблица 1):
) при экстремальных значениях управляющих поперечных перегрузок определяется зависимость допустимых углов поворота траектории от удаленности БПЛА от начальной точки траектории. Составляются таблицы вида (таблица 1):

Зависимость допустимого угла поворота траектории γдоп от удаленности БПЛА от начальной точки траектории при  =30000 м и
=30000 м и  =4500 м/с
=4500 м/с

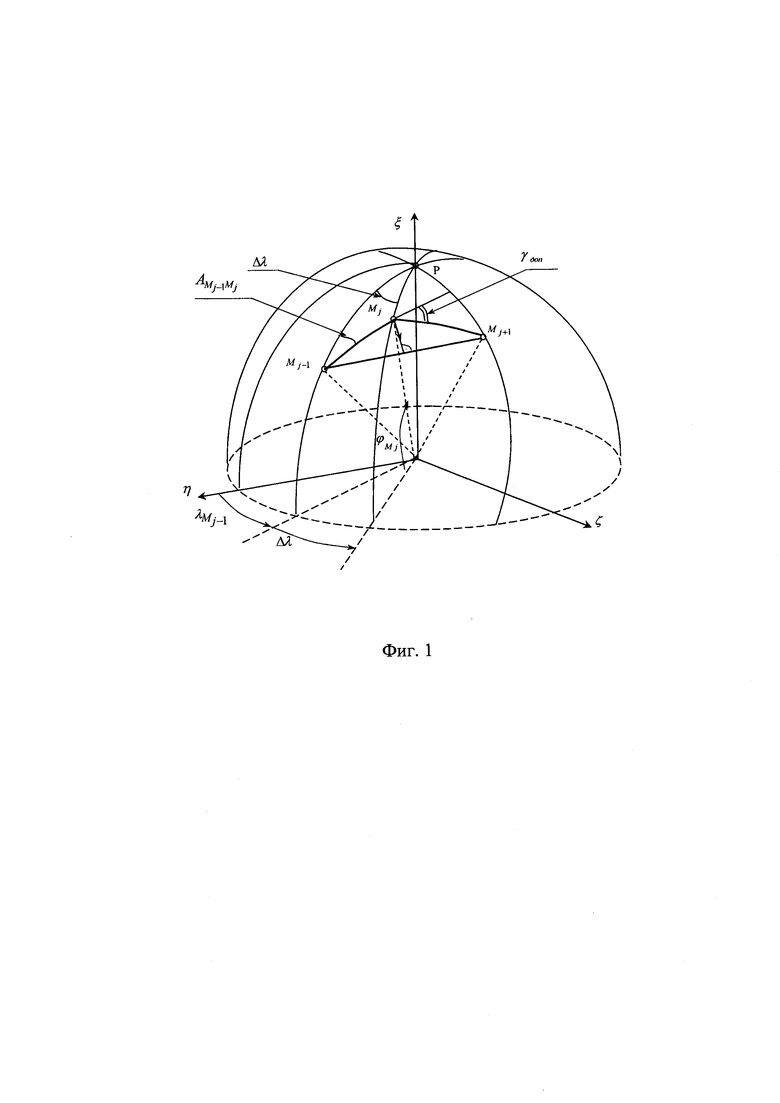
2. При формировании конкретного маршрута БПЛА на сфере среднего радиуса Земли (фиг. 1) по формулам сферической тригонометрии определяются углы γi между звеньями формируемого маршрута БПЛА. Используя зависимость (1), определяются проблемные опорные точки, в которых имеет место неравенство

и, следовательно, в полете в опорной точке Sj(Bj, Lj, Hj) не может выполняться ограничение по поперечным перегрузкам.
3. Осуществляется коррекция положения проблемных опорных точек маршрута по алгоритму, обеспечивающему уменьшение углов γi(D) до допустимых значений.
Суть предлагаемого способа коррекции первоначально заданной конфигурации маршрута БПЛА заключается в создании зависимости (1) и ее использовании для выявления проблемных опорных точек маршрута и в создании алгоритма изменения координат отдельных опорных точек до значений, обеспечивающих выполнение в полете ограничений по поперечным перегрузкам.
Алгоритм изменения координат проблемной опорной точки включает:
1. Решение по формулам сферической тригонометрии сферических треугольников PMj-1Mj и PMjMj+1 (фиг. 1) с определением угла γi как угла между сторонами треугольников с общей вершиной Mj. Все необходимые данные для определения сторон и углов указанных треугольников имеются - это координаты Bj, Lj точек Mj-1, Mj и Mj+1. Преобразования геодезических координат в сферические известны, но здесь не приводятся. Алгоритм решения данной задачи включает:
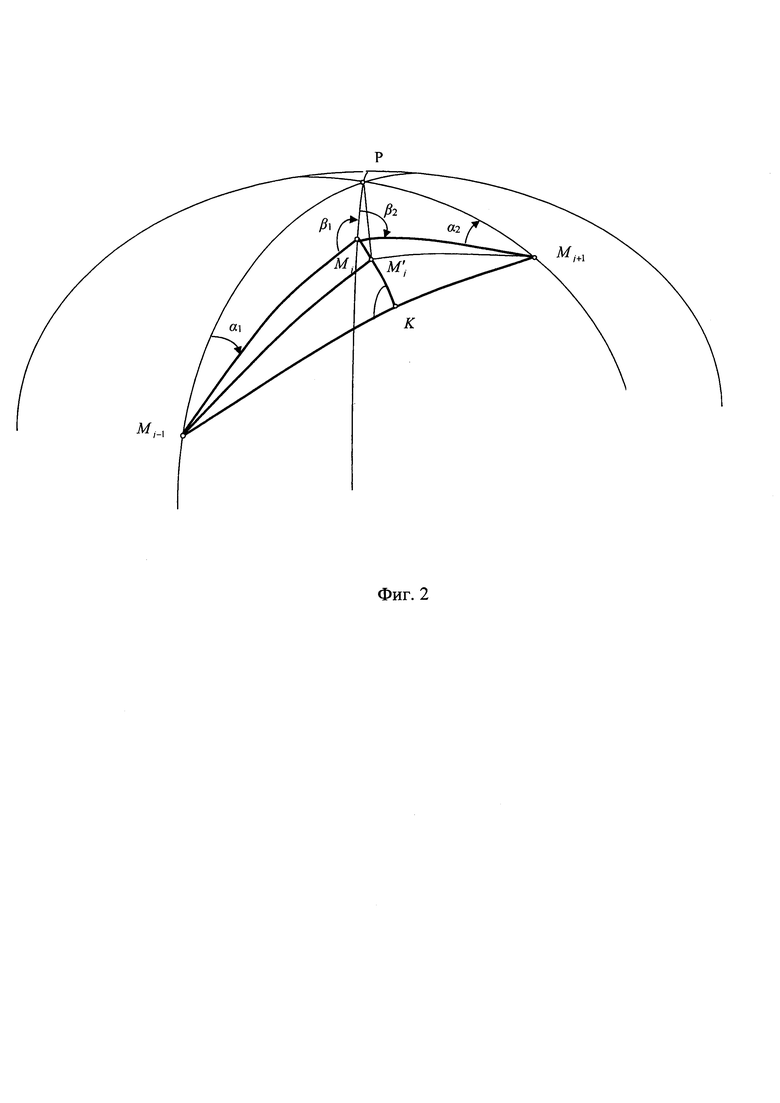
а) из треугольника PMj-1Mj определяются углы α1 и β1 (фиг. 2);
б) определяется внешний к углу β1 угол λ = π - β1;
в) из треугольника PMjMj+1 определяется угол β2;
г) определяется угол γj=β2 - λ.
2. Итерационную процедуру по смещению точки Mj вдоль нормали к линии Mj-1 Mj+1 на малые расстояния с целью изменения (уменьшения) величины угла γi до допустимого значения

определяемого по таблице 1.
Итерационная процедура при допущении, что звено маршрута Mj-1M'j=Mj-1Mj=const, включает:
а) изменение угла α2 на малый угол  , его увеличение в случае, если Bj > Bj-1, и уменьшение в обратном случае;
, его увеличение в случае, если Bj > Bj-1, и уменьшение в обратном случае;
б) определение стороны PM'j сферического треугольника PMj-1M'j по теореме косинусов сторон:

где Фj - угловая мера звена Mj-1Mj, величина которого определяется из треугольника PM'jMj+1 по теореме синусов:
sinФj=sin(Lj-Lj-1)⋅cos Bj-1/sinβ1;
в) определение угла ΔL'j=Lj - L'j из выражения для косинуса стороны Mj-1M'j сферического треугольника PMj-1M'j:

г) определение координат точки M'j:
из выражения (4) следует


д) далее все расчеты п.п. 1, 2 проводятся циклично до выполнения условия (3).
Алгоритм, представленный в п.п. 1, 2, помимо того, что он обеспечивает формирование маршрута БПЛА, может быть включен в бортовой алгоритм контроля реализуемости каждого очередного поворота траектории, устраняя воздействия возмущений движения БПЛА.
Изобретение относится к способу коррекции формируемой конфигурации маршрута беспилотного планирующего летательного аппарата (БПЛА). Для коррекции формируемой конфигурации маршрута задают маршрут опорными точками в виде совокупности геодезических координат, в опорных точках определяют величины углов поворота, и если при сравнении с допустимыми значениями заблаговременно установленных и заданных таблично в функции дальности полета углов обнаруживают различие, обуславливающее нарушение заданных технических ограничений на управляющие параметры БПЛА, то по правилам сферической тригонометрии итерационно смещают проблемную опорную точку на малые расстояния с уменьшением величины угла поворота маршрута до допустимого значения. Обеспечивается коррекция формируемого маршрута БПЛА при невыполнении технических ограничений в опорных точках. 2 ил., 1 табл.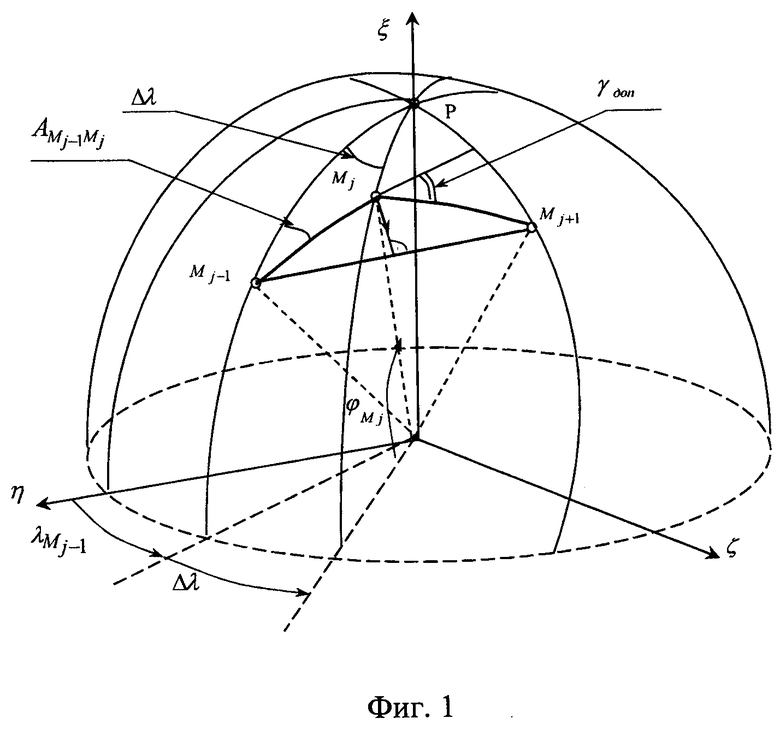
Способ коррекции формируемой конфигурации маршрута беспилотного планирующего летательного аппарата (БПЛА), заключающийся в том, что маршрут БПЛА задают опорными точками в виде совокупности геодезических координат, отличающийся тем, что при формировании маршрута БПЛА в опорных точках определяют величины углов поворота, и если при сравнении с допустимыми значениями заблаговременно установленных и заданных таблично в функции дальности полета углов обнаруживают различие, обуславливающее нарушение заданных технических ограничений на управляющие параметры БПЛА, то по правилам сферической тригонометрии итерационно смещают проблемную опорную точку на малые расстояния с уменьшением величины угла поворота маршрута до допустимого значения.
| ПРИВОД ДЛЯ ПЛОСКОЙ ВЯЗАЛЬНОЙ МАШИНЫ | 1923 |
|
SU1027A1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА ГОРОДСКОЙ ЗАСТРОЙКИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2661269C2 |
| US 20190100310 A1, 04.04.2019 | |||
| US 5375059 A1, 20.12.1994. | |||

