Изобретение относится к области управления полетами планирующих беспилотных летательных аппаратов (БЛА) и может быть использовано при планировании их маршрутов и соответствующих траекторий.
Наиболее близким к данному изобретению является «Способ формирования спиралевидного движения планирующего летательного аппарата относительно опорной траектории» [2] (патент RU, 2306593 RU №2005134997/28), который базируется на следующих основных положениях:
1. Маневр планирующего летательного аппарата (ЛА) формируется непосредственно в полете по остаточному принципу после анализа имеющегося на текущий момент (располагаемого) ресурса управления поперечным движением ЛА и выделения из него ресурса, требуемого на наведение на конечную точку опорной траектории.
2. Бортовые алгоритмы формирования маневра - три разных алгоритма - являются дополнительными к бортовому алгоритму наведения ЛА по требуемому ускорению.
3. Конфигурация маневра - гармонические колебания центра масс ЛА относительно опорной траектории с амплитудами в вертикальной и горизонтальной плоскостях.
Недостатки данного способа:
1. Маневр в виде гармонических колебаний ЛА относительно опорной траектории, формируемый по остаточному принципу и по амплитудам, не всегда может удовлетворить требованиям, предъявляемым к маневрам ЛА, а в ряде случаев, например при больших вариациях плотности атмосферы, на формирование маневра вообще может не хватить ресурса управления поперечным движением ЛА. Из-за возможной нехватки ресурса на формирование маневра тактическая задача ЛА может оказаться невыполненной.
2. Бортовой алгоритм формирования маневра ЛА достаточно громоздок, поскольку включает в себя решения комплекса задач: 1) анализ текущего ресурса управления поперечным движением ЛА; 2) выделение из него ресурса на наведение ЛА по опорной траектории и определение величины остатка на формирование маневра; 3) обеспечение входа в спиралевидное движение ЛА; 4) поддержание режима спиралевидного движения; 5) обеспечение выхода из него на опорную траекторию.
Задачей предлагаемого изобретения является формирование гарантированно осуществимого в реальном полете маневра планирующего БЛА произвольной конфигурации с минимальными изменениями или дополнениями бортовых алгоритмов управления полетом.
Требуемый технический результат достигается заблаговременным расчетом маневренных траекторий БЛА во вспомогательной системе координат, определением необходимого числа и расположения опорных точек рассчитанной маневренной траектории, включением в состав данных полетного задания БЛА координат некоторой совокупности опорных точек и использованием их в полете БЛА в качестве промежуточных точек наведения по методу требуемых ускорений.
Сущность изобретения поясняется приведенным ниже описанием и рисунками Фиг.1 и Фиг.2.
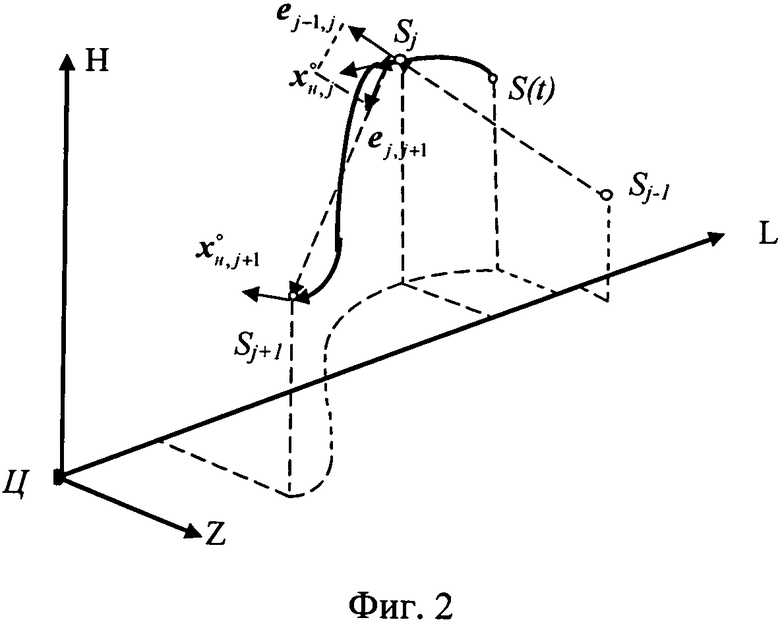
Маневры БЛА по предлагаемому способу формируются первоначально еще на этапе исследования маневренных возможностей БЛА с учетом различных факторов методом математического моделирования его движения с анализом эффективности задаваемых маневренных траекторий и фиксацией допустимых вариантов маневра. Расчеты параметров траекторий БЛА проводятся во вспомогательной системе координат OвLHZ (Фиг.1), начало которой задается в некоторой точке Ов земной поверхности в заданном регионе Земли. Ее ось ОвН - ось отсчета высот точек траектории - вертикальна, ось дальностей OвL ориентирована на север, а ось OвZ дополняет систему координат до правой. Расчетные траектории, удовлетворяющие всем тактическим и техническим ограничениям, признаются пригодными для использования в качестве опорных траекторий при планировании использования БЛА в реальных условиях, а координаты отдельных их точек - точек перегиба - фиксируются в соответствующей базе данных (БД), в качестве координат опорных точек опорных траекторий Sij(Lij,Hij,Zij) (i - номер варианта маневра, j - номер опорной точки).
При подготовке полета БЛА в его полетное задание из БД вносятся координаты опорных точек Sij(Lij,Hij,Zij) выбранного варианта маневра, а по существу - варианта конфигурации конечного участка траектории движения БЛА, а также в ПЗ вносятся геодезические координаты конечной точки полета БЛА - точки Ц - ВЦ, LЦ, НЦ и азимут оси OвL - 
Координаты опорных точек планируемой траектории БЛА Sj(Lj, Hj, Zj), (j=1,…,n) (здесь и далее номер варианта маневра i опущен), геодезические координаты точки Ц - ВЦ, LЦ, НЦ - и азимут оси OвL 
Необходимость этих данных очевидна (см. Фиг.1), а достаточность вытекает из нижеследующих посылок и выкладок.
Последовательное наведение БЛА на опорные точки Sj осуществляется с использованием метода наведения «по требуемому ускорению» [1], алгоритм которого представляет собой решение в каждом цикле наведения краевой баллистической задачи (КБЗ) с определением требуемого кажущегося ускорения, переводящего БЛА из текущего фазового состояния в требуемое конечное.
Краевые условия КБЗ обычно задаются в так называемой целевой прямоугольной системе координат с началом в точке цели, а в нашем случае - в промежуточной целевой системе координат Sjxнунzн с началом в очередной опорной точке траектории БЛА Sj, осью Sjxн, ориентированной в пространстве в направлении требуемого движения в точке Sj, осью Sjун, лежащей в вертикальной плоскости, содержащей ось Sjxн, и осью Sjzн, дополняющей систему координат Sjxнунzн до правой.
В общем случае краевые условия КБЗ включают фазовые параметры движения БЛА в текущей точке траектории - xн, yн, zн, 







Для обеспечения плавного изгиба траектории БЛА при пролете каждой очередной опорной точки Sj и начале движения к следующей опорной точке. Sj+1 промежуточная целевая система координат Sjxнyнzн ориентируется в пространстве определенным образом (см. Фиг.2), для чего достаточно задать ориентацию орта 

где е1, е2, e3 - составляющие орта 
ej-1,j и ej,j+1 - единичные векторы звеньев Sj-1Sj и Sj, Sj+1 ломаной линии с вершинами в точках Sj-1, Sj, Sj+1.
В проекциях на оси системы координат ЦLHZ: они находятся по следующим формулам:
Необходимая для преобразования параметров движения БЛА матрица связи промежуточной целевой системы координат Sjxнyнzн с системой координат ЦLHZ представлена в виде:
Обычно текущие параметры движения БЛА r(t), V(t) определяются в какой-либо системе координат, связанной с Землей. Например, в нордовой системе координат ЦхNyNzN: [хN, yN, zN]T, [

где матрица 
матрица 
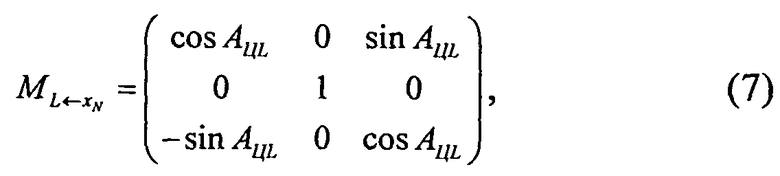
а матрица 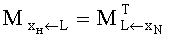
При наведении БЛА на очередную опорную точку в каждом цикле наведения определяется требуемое кажущееся ускорение 




для управления движением БЛА используется значение 

При достижении БЛА опорной точки траектории Sj текущие фазовые параметры движения r(t), V(t) пересчитываются в следующую промежуточную целевую систему координат Sj+1xнyнzн, задаваемую по тому же правилу, что и система Sjxнyнzн, и начинается наведение на следующую точку Sj+1, затем на следующую и так далее до конечной точки Ц.
Из приведенных выкладок следует, что при предлагаемом способе формирования маневра БЛА весь располагаемый текущий ресурс управления поперечным движением БЛА используется на формирование траектории движения к очередной опорной точке наведения с последующим разворотом на следующую опорную точку по плавно изгибающейся траектории, затем на следующую и т.д., т.е. весь располагаемый текущий ресурс управления используется на формирование маневренной траектории БЛА с конечной опорной точкой Ц, наведение на которую ничем не отличается от наведения на промежуточные опорные точки траектории.
Предлагаемым способом могут быть сформированы траектории планирующих БЛА как с известными типами маневров, такими как «спираль», «горизонтальная змейка», «вертикальная змейка» с различными амплитудами, так и маневры с асимметричными отклонениями от прямолинейной или баллистической траектории. Амплитуды маневров гармонического типа, сформированных по данному способу, определяются только расстояниями между соседними опорными точками маневренной траектории,.
Примеры задания траекторий планирующего БЛА с маневрами на конечном участке траектории приведены в таблице 1.
маневра
опорные точки
Вариант №1
Вариант №2
Вариант №3
Пример реализации маневра, запланированного шестью опорными точками Sj(Lj, Hj, Zj), включая точку Ц(0, 0, 0) (см. таблицу 1, вариант №1), полученный моделированием на ЭВМ траектории БЛА при ограничениях на управляющий параметр αn 16 градусами (см. параметр АЛЬФА (t) в таблице 3), приведен в таблицах 2 и 3. В таблице 2 параметры движения БЛА в опорных точках траектории выделены жирным шрифтом.
Обозначения в табл.2: t, Н, V, L, Z - определены выше, teta - угол наклона траектории к горизонту, psi - угол курса относительно оси дальностей ЦL.
Параметры движения БЛА с маневром варианта №1 в проекциях на оси промежуточных целевых систем координат Sjxuz представлены в таблице 3.
Таким образом, предварительный расчет траекторий БЛА с различными маневрами, с фиксацией в БД вариантов расположения во вспомогательной системе координат OвLHZ опорных точек этих траекторий, последующий выбор из БД и включение в ПЗ требуемого варианта маневра БЛА и соответствующих координат опорных точек Sj(Lj,Hj,Zj), а также задание азимута оси OвL -
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Горченко Л.Д. Метод терминального наведения по требуемому ускорению аэродинамически управляемых летательных аппаратов. Журнал «Полет» №6, М.: Машиностроение, 1999, с 21-24.
2. Патент RU №2306593, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сокращения потерь скорости и времени при осуществлении маневра заданной конфигурации беспилотным летательным аппаратом планирующего типа | 2016 |
|
RU2623361C1 |
| Способ управления беспилотным планирующим летательным аппаратом | 2017 |
|
RU2654238C1 |
| СПОСОБ НАВЕДЕНИЯ НА ВЫСОКОСКОРОСТНЫЕ ВЫСОКОМАНЕВРЕННЫЕ ВОЗДУШНЫЕ ОБЪЕКТЫ | 2020 |
|
RU2751378C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539703C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ СБРОСЕ ГРУЗОВ В ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ С МАНЕВРИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2295104C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| СПОСОБ ОПТИМАЛЬНОГО ОБХОДА ГРОЗЫ | 2005 |
|
RU2316023C2 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА ГОРОДСКОЙ ЗАСТРОЙКИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2661269C2 |
Изобретение относится к области управления полетами планирующих беспилотных летательных аппаратов (БЛА) и может быть использовано при планировании их маршрутов и соответствующих траекторий. Техническим результатом является повышение эффективности управления планирующим беспилотным летательным аппаратом. Сущность способа заключается в заблаговременном расчете маневренных траекторий беспилотного летательного аппарата, фиксации координат их опорных точек во вспомогательной системе координат, которые затем задают в полетном задании вместе с данными для привязки вспомогательной системы координат к Земле в точке цели и используют в полете в качестве промежуточных точек наведения по методу требуемых ускорений. 2 ил., 3 табл.
Способ формирования маневров произвольной конфигурации на конечном участке траектории планирующего беспилотного летательного аппарата, включающий задание опорной траектории, применение силовых воздействий на летательный аппарат в вертикальной и горизонтальной плоскостях, использование метода наведения по требуемому ускорению и отличающийся тем, что опорные точки опорной траектории заблаговременно задают во вспомогательной прямоугольной системе координат в произвольном зигзагообразном порядке по высоте и в плане, их координаты вносят в базу данных, а перед полетом летательного аппарата из базы данных выбирают и включают в состав данных полетного задания вместе с азимутом оси дальностей вспомогательной системы координат и геодезическими координатами конечной точки, преобразуют в систему координат, привязанную к Земле в конечной точке планируемой траектории и используют в полете в качестве промежуточных точек наведения летательного аппарата.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для перекатки колесных пар по железнодорожному пути | 1918 |
|
SU2665A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

