Изобретение относится к области радиотехники и может быть использовано в системах радиомониторинга систем передачи и ретрансляции данных с шумоподобными (широкополосными) сигналами как с расширением спектра, так и без него.
Известен способ обнаружения широкополосного сигнала [1 - Пат. 2470459 Российская Федерация, МПК H04B 1/10, Y04L 7/00, H03K 7/08. Способ обнаружения широкополосных сигналов и устройство для его реализации. Климов И.З. и др.], при котором осуществляют прием сигналов, инвертирование и коммутирование с целью снятия широкополосной модуляции, интегрирование, сравнение полученного сигнала с пороговым уровнем и принятие решения о наличии или отсутствии сигнала.
Недостатком данного способа при мониторинге систем ретрансляции данных, использующих многостанционный доступ с кодовым разделением каналов (МДКР), и широкополосных систем передачи данных, работающих без расширения спектра, является необходимость наличия эталонного сигнала, необходимого в первом случае для снятия широкополосной модуляции, а во втором - для повышения отношения сигнал/шум до уровня, необходимого для принятия решения о наличии/отсутствии сигнала с заданными вероятностями ложной тревоги и правильного обнаружения.
Известен также способ обнаружения шумоподобного сигнала [2 - Пат. 2248102 Российская Федерация, МПК H04L 27/22. Способ автокорреляционного приема шумоподобных сигналов. Дикарев В.И. и др.], при котором принятый сигнал, согласно способу автокорреляционного приема шумоподобных сигналов, перемножают с опорным сигналом, измеряют длительность принимаемого сигнала, осуществляют его частотное детектирование, выделяя при этом моменты скачкообразного изменения фазы, определяют количество и величину тактовых периодов, опорный сигнал формируют путем задержки принимаемого сигнала на время, кратное тактовому периоду τЭ, выделяют суммарное напряжение, перемножают его с принимаемым сигналом, задержанным на время, кратное тактовому периоду τЭ, выделяют напряжение разности частоты, перемножают его с принимаемым сигналом, задержанным на время τ, которое периодически изменяют по линейному закону, выделяют низкочастотное напряжение, пропорциональное автокорреляционной функции, сравнивают его с пороговым уровнем, при превышении порогового уровня измеряют циклический сдвиг, по которому определяют кодовую структуру принимаемого сигнала.
Недостатком данного способа при мониторинге систем ретрансляции данных, использующих многостанционный доступ с кодовым разделением каналов (МДКР), и широкополосных систем передачи данных, работающих без расширения спектра, является необходимость наличия априорной информации о полосе сигнала, необходимой для выбора согласованной с полосой сигнала длительности некогерентного накопления.
Наиболее близким по технической сущности к заявляемому изобретению является способ обнаружения широкополосного сигнала [3 - Музыченко Н.Ю. Метод обнаружения широкополосного сигнала по результатам параллельного частотного анализа в условиях неопределенности // Радиотехника. 2012. №5. С. 41-45], взятый за прототип, при котором принимают радиоизлучение с направления на контролируемую систему в полосе, много большей полосы сигнала, выполняют построение периодограммы [ƒi, Pi], где ƒi и Pi - соответственно частота и мощность смеси сигнала и шума или только шума в i-м параллельном канале, i∈[1, …, N], N - число частотных каналов, формируют массив  при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом, оценивают математическое ожидание шумовых выборок по алгоритму
при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом, оценивают математическое ожидание шумовых выборок по алгоритму

где 

 - шаг дискретизации параметра Pj
- шаг дискретизации параметра Pj 
Pш - математическое ожидание шума;
m, l - формообразующие параметры функции принадлежности;
g - параметр, приводящий максимальное значение функции к единице,
переформируют массив  путем вычитания из каждого его элемента Pш, группируют отрицательные элементы переформированного массива
путем вычитания из каждого его элемента Pш, группируют отрицательные элементы переформированного массива  и вычисляют по ним дисперсию шума
и вычисляют по ним дисперсию шума  а по ней - порог принятия решения Uпор и по результатам сравнения
а по ней - порог принятия решения Uпор и по результатам сравнения  с Uпор принимают решение о наличии или отсутствии сигнала.
с Uпор принимают решение о наличии или отсутствии сигнала.
Недостатком данного способа при мониторинге систем ретрансляции данных, использующих многостанционный доступ с кодовым разделением каналов (МДКР), и широкополосных систем передачи данных, работающих без расширения спектра, как и в предыдущем случае, является необходимость наличия априорной информации о полосе сигнала, необходимой для выбора согласованной с полосой сигнала длительности некогерентного накопления.
Задачей, на решение которой направлено заявляемое изобретение, является обнаружение шумоподобных сигналов с близким к прямоугольному спектром в условиях отсутствия априорной информации о частотных параметрах сигнала систем, работающих с расширением спектра и без него.
Для решения поставленной задачи предлагается способ обнаружения шумоподобного сигнала, при котором принимают радиоизлучение с направления на контролируемую систему в полосе, много большей полосы сигнала, выполняют построение периодограммы [ƒi, Pi], где ƒi и Pi - соответственно частота и мощность смеси сигнала и шума или только шума в i-м параллельном канале, i∈[1, …, N], N - число частотных каналов, формируют массив  при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом, переформируют массив
при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом, переформируют массив  путем вычитания из каждого его элемента математического ожидания шума Pш, по дисперсии шума и заданной вероятности ложной тревоги определяют порог принятия решения Uпор, по результатам сравнения
путем вычитания из каждого его элемента математического ожидания шума Pш, по дисперсии шума и заданной вероятности ложной тревоги определяют порог принятия решения Uпор, по результатам сравнения  с Uпор принимают решение о наличии или отсутствии сигнала.
с Uпор принимают решение о наличии или отсутствии сигнала.
Согласно изобретению перед формированием массива  определяют число занимаемых сигналом частотных каналов N1, для чего для всех возможных значений N1 в зоне его неопределенности [N1min, …, N1max], где N1min и N1max - соответственно минимальное и максимальное число частотных каналов, занимаемых сигналом, вычисляют
определяют число занимаемых сигналом частотных каналов N1, для чего для всех возможных значений N1 в зоне его неопределенности [N1min, …, N1max], где N1min и N1max - соответственно минимальное и максимальное число частотных каналов, занимаемых сигналом, вычисляют  где
где  для каждого вычисленного значения
для каждого вычисленного значения  из элементов одноименного ему массива
из элементов одноименного ему массива  селектируют группу очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие
селектируют группу очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие  где ν - параметр, определяющий степень близости
где ν - параметр, определяющий степень близости  к
к  определяют N1, соответствующее группе с минимальным K(N1) и номер частотного канала j*∈[1, …, N-N1] соответствующий
определяют N1, соответствующее группе с минимальным K(N1) и номер частотного канала j*∈[1, …, N-N1] соответствующий  из элементов массива
из элементов массива  для которых j<j*-N1 и j>j*+N1 формируют шумовой кластер и статистическим методом вычисляют для него математическое ожидание шума Pш и его дисперсию
для которых j<j*-N1 и j>j*+N1 формируют шумовой кластер и статистическим методом вычисляют для него математическое ожидание шума Pш и его дисперсию 
Техническим результатом изобретения является обнаружение шумоподобного сигнала с близким к прямоугольному спектром в условиях отсутствия априорной информации о его частотных параметрах с вероятностными характеристиками, близкими к [3, С. 41-45].
Сочетание отличительных признаков и свойства предлагаемого изобретения из литературы неизвестны, поэтому оно соответствует критериям новизны и изобретательского уровня.
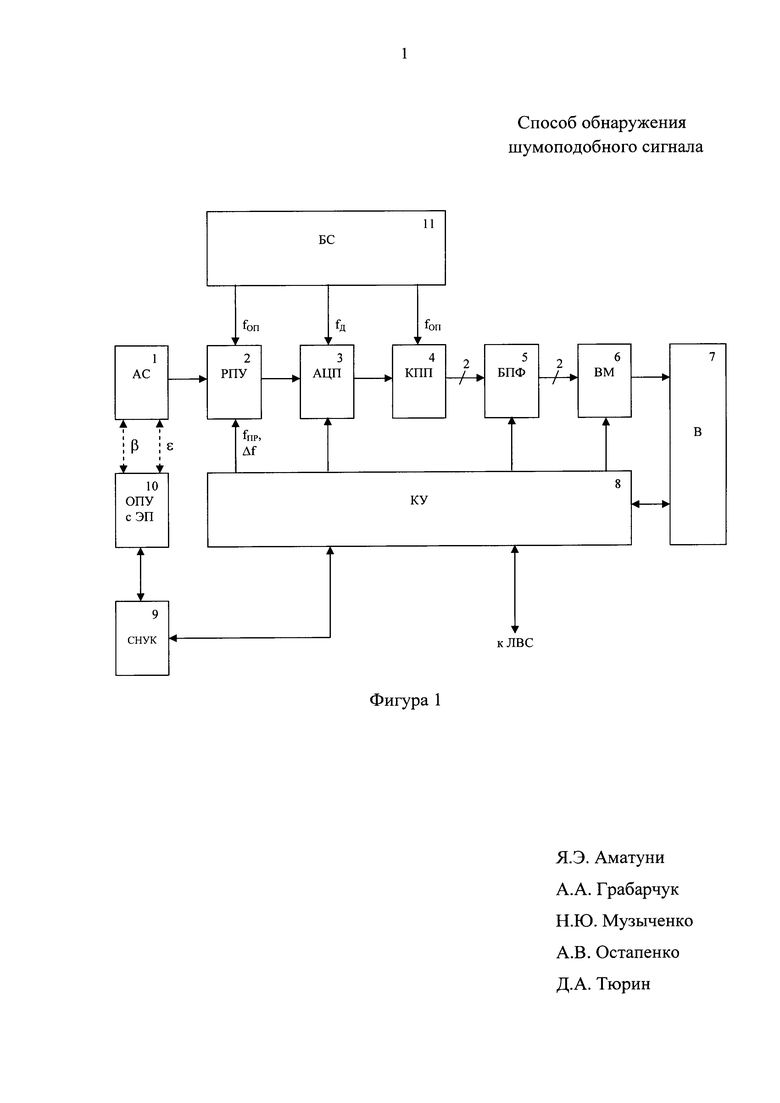
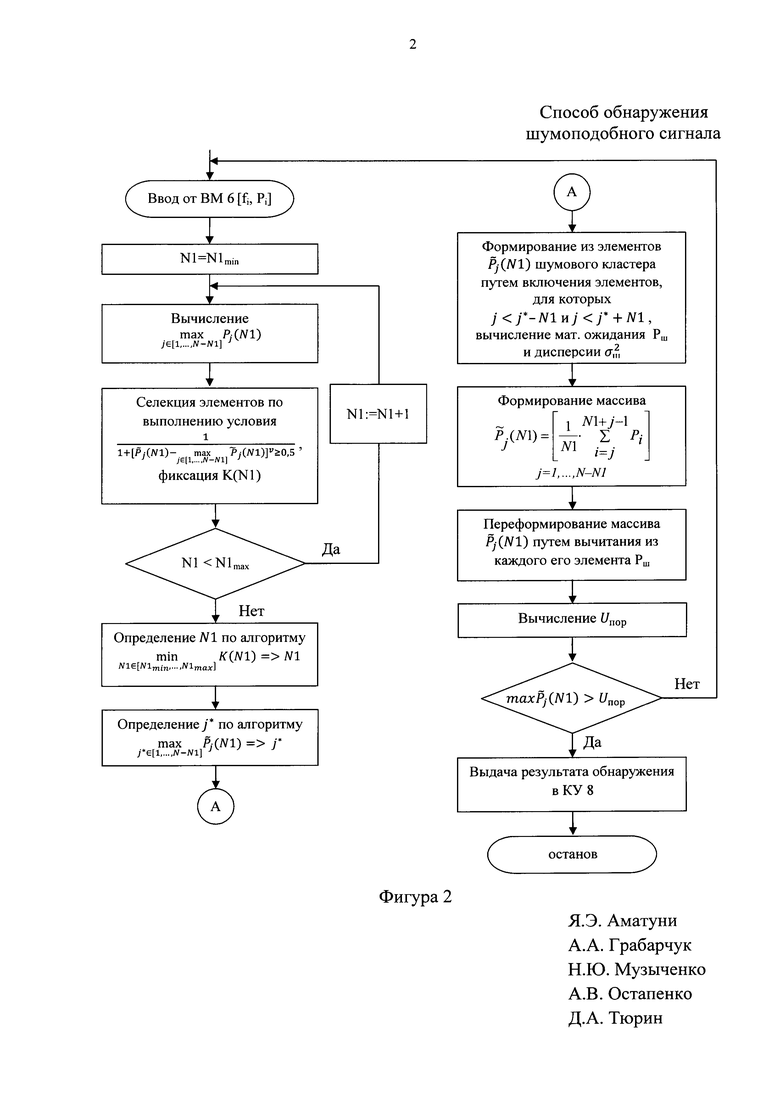
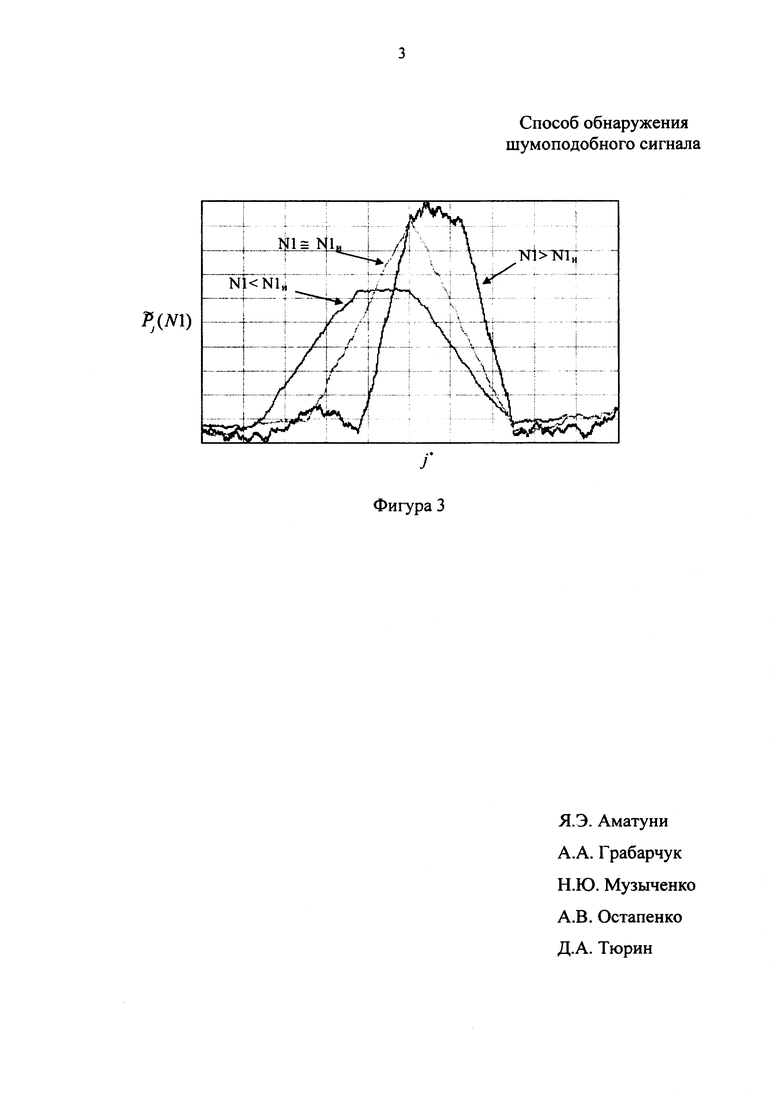
На фигуре 1 приведена схема устройства, реализующего предлагаемый способ, на фигуре 2 - алгоритм работы вычислителя, на фигуре 3 - диаграмма, поясняющая принцип определения центральной частоты и полосы сигнала.
При реализации предлагаемого способа выполняется следующая последовательность операций:
- принимают радиоизлучение с направления на контролируемую систему в полосе, много большей полосы сигнала - 1;
- выполняют построение периодограммы [ƒi, Pi], где ƒi и Pi - соответственно частота и мощность смеси сигнала и шума или только шума в i-м параллельном канале, i∈[1, …, N], N - число частотных каналов - 2;
- определяют число занимаемых сигналом частотных каналов N1, для чего:
для всех возможных значений N1 в зоне его неопределенности [N1min, …, N1max], где N1min и N1max - соответственно минимальное и максимальное число частотных каналов, занимаемых сигналом, вычисляют  где
где 
для каждого вычисленного значения  из элементов одноименного ему массива
из элементов одноименного ему массива  селектируют группу очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие
селектируют группу очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие  где ν - параметр, определяющий степень близости
где ν - параметр, определяющий степень близости  к
к 
- фиксируют N1, соответствующее группе с минимальным K(N1), и определяют номер частотного канала j*∈[1, …, N-N1], соответствующий 
- из элементов массива  для которых j<j*-N1 и j>j*+N1, формируют шумовой кластер и статистическим методом вычисляют для него математическое ожидание шума Pш и его дисперсию
для которых j<j*-N1 и j>j*+N1, формируют шумовой кластер и статистическим методом вычисляют для него математическое ожидание шума Pш и его дисперсию 
- формируют массив  при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом - 6;
при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом - 6;
- переформируют массив  путем вычитания из каждого его элемента Pш - 7;
путем вычитания из каждого его элемента Pш - 7;
- по дисперсии шума и заданной вероятности ложной тревоги определяют порог принятия решения Uпор - 8;
- по результатам сравнения  с Uпор принимают решение о наличии или отсутствии сигнала - 9.
с Uпор принимают решение о наличии или отсутствии сигнала - 9.
Сравнительный анализ способа-прототипа и предлагаемого способа показывает, что в него введены новые операции по определению числа занимаемых сигналом частотных каналов N1, номера частотного канала j*∈[1, …, N-N1], соответствующего  выделения шумового кластера и вычисления математического ожидания шума и его дисперсии, которые позволяют обеспечить обнаружение широкополосного сигнала в условиях отсутствия априорной информации о его частотных параметрах с вероятностными характеристиками, близкими к [3, С. 41-45].
выделения шумового кластера и вычисления математического ожидания шума и его дисперсии, которые позволяют обеспечить обнаружение широкополосного сигнала в условиях отсутствия априорной информации о его частотных параметрах с вероятностными характеристиками, близкими к [3, С. 41-45].
Устройство, реализующее предлагаемый способ, содержит последовательно соединенные антенную систему АС 1, радиоприемное устройство РПУ 2, аналого-цифровой преобразователь АЦП 3, конвертор прямого преобразования КПП 4, блок быстрого преобразования Фурье БПФ 5, вычислитель мощности ВМ 6, вычислитель В 7, контроллер управления КУ 8, систему наведения по угловым координатам СНУК 9 и опорно-поворотное устройство с электроприводами азимута β и угла места ε ОПУ с ЭП 10, а также блок синхронизации БС 11, первый, второй и третий выходы которого связаны соответственно со вторыми входами РПУ 2, АЦП 3 и КПП 4, при этом выходы β и ε ОПУ с ЭП 10 механически связаны с АС 1, второй, третий, четвертый, пятый выходы КУ 8 соответственно связаны с третьими входами РПУ 2 и АЦП3, вторыми входами БПФ 5 и ВМ 6, а шестой вход-выход КУ 8 - с локальной вычислительной сетью ЛВС.
Устройство работает следующим образом.
По ЛВС от внешней управляющей системы на КУ 8 поступает следующая информация:
- угловые координаты источника радиоизлучения;
- диапазон частот поиска [ƒН, …, ƒB];
- диапазон возможного изменения полосы сигнала [ƒCH, …, ƒCB], ƒСН≥ƒН, ƒСВ≤ƒВ;
- команда на запуск/прекращение цикла обнаружения сигналов.
При получении по ЛВС информации и команды инициализации цикла обнаружения от вышестоящей системы КУ 8 на основании полученных данных об угловых координатах источника радиоизлучения и диапазоне частот поиска формирует и выдает на СНУК 9 и РПУ 2 команды на пространственное и частотное наведение. По получении этих команд СНУК 9 с помощью ОПУ с ЭП 10 производит наведение АС 1 на заданные угловые координаты по азимуту β и углу места ε, а РПУ 2 - на центральную частоту  и полосу Δƒ=ƒB-ƒН частотного анализа. По окончании времени, необходимого на настройку РПУ 2 на заданную частоту ƒпр и полосу сигнала Δƒ, КУ 8 выдает на АЦП 3 сигнал разрешения преобразования, производимого с частотой дискретизации ƒд в течение времени, обратно пропорционального частоте разрешения БПФ 5. Цифровые коды, получаемые с выходов АЦП 3, поступают на вход КПП 4, производящего преобразование входного сигнала на нулевую частоту. С его квадратурных выходов сигналы поступают на БПФ 5, где осуществляется преобразование сигналов из временной области в частотную. В ВМ 6 производится вычисление мощности шума или смеси сигнала и шума для каждой частотной точки, и полученный таким образом поток информации передается в В 7, где производится его обработка в соответствии с алгоритмом, приведенным на фигуре 2. В процессе обработки в В 7 производятся следующие вычисления:
и полосу Δƒ=ƒB-ƒН частотного анализа. По окончании времени, необходимого на настройку РПУ 2 на заданную частоту ƒпр и полосу сигнала Δƒ, КУ 8 выдает на АЦП 3 сигнал разрешения преобразования, производимого с частотой дискретизации ƒд в течение времени, обратно пропорционального частоте разрешения БПФ 5. Цифровые коды, получаемые с выходов АЦП 3, поступают на вход КПП 4, производящего преобразование входного сигнала на нулевую частоту. С его квадратурных выходов сигналы поступают на БПФ 5, где осуществляется преобразование сигналов из временной области в частотную. В ВМ 6 производится вычисление мощности шума или смеси сигнала и шума для каждой частотной точки, и полученный таким образом поток информации передается в В 7, где производится его обработка в соответствии с алгоритмом, приведенным на фигуре 2. В процессе обработки в В 7 производятся следующие вычисления:
- определение числа занимаемых сигналом частотных каналов N1, для чего:
- для всех возможных значений N1 в зоне его неопределенности [N1min, …, N1max], где N1min и N1max - соответственно минимальное и максимальное число частотных каналов, занимаемых сигналом, вычисляются  где
где 
- для каждого вычисленного значения  из элементов одноименного ему массива
из элементов одноименного ему массива  селектируется группа очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие
селектируется группа очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие  где ν - параметр, определяющий степень близости
где ν - параметр, определяющий степень близости  к
к 
- фиксируется N1, соответствующее группе с минимальным K(N1), и определяется номер частотного канала j*∈[1, …, N-N1], соответствующий 
- из элементов массива  для которых j<j*-N1 и j>j*+N1 формируется шумовой кластер и статистическим методом вычисляются математическое ожидание шума Pш и его дисперсия
для которых j<j*-N1 и j>j*+N1 формируется шумовой кластер и статистическим методом вычисляются математическое ожидание шума Pш и его дисперсия 
- формируется массив  при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом;
при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом;
- производится переформирование массива  путем вычитания из каждого его элемента Pш;
путем вычитания из каждого его элемента Pш;
- по дисперсии шума и заданной вероятности ложной тревоги определяется порог принятия решения Uпор;
- по результатам сравнения  с Uпор принимается решение о наличии или отсутствии сигнала.
с Uпор принимается решение о наличии или отсутствии сигнала.
Синхронизация работы РПУ 2 и КПП 4 производится путем подачи на них от БС 11 высокостабильных сигналов fоп, тактирование АЦП 3 - путем подачи на него высокостабильного сигнала ƒд. Управление преобразованием из временной области в частотную БПФ 5 и вычислением модуля ВМ 6 осуществляются с помощью сигналов управления от КУ 8. По окончании цикла вычислений В 7 выдает в КУ 8 принятое решение о наличии либо отсутствии широкополосного сигнала, которое далее передается по ЛВС в вышестоящую систему. После этого устройство переходит в режим ожидания информации от внешней управляющей системы.
Все элементы, входящие в устройство и выполняемые в процессе вычислений в В 7 операции, являются стандартными, вследствие чего отдельное описание их устройства и конкретизация алгоритма его вычисления здесь не приводятся. Особенностью способа является порядок определения N1 и j*, для которого использовано свойство функции  иметь минимальную степень размытости вблизи точки
иметь минимальную степень размытости вблизи точки  при стремлении N1 к его истинному значению. Вид этой функции для случаев N1<N1И, N1≅N1И и N1>N1И показан на фигуре 3, где N1И - истинная частота сигнала.
при стремлении N1 к его истинному значению. Вид этой функции для случаев N1<N1И, N1≅N1И и N1>N1И показан на фигуре 3, где N1И - истинная частота сигнала.
Введение операций, позволяющих определить N1 и j*, позволило решить задачу обнаружения шумоподобных сигналов в условиях отсутствия априорной информации о частотных параметрах сигнала систем, работающих с расширением и без расширения спектра, и отсутствия системы оценивания частотных параметров сигнала. Областью применения способа являются системы обнаружения шумоподобных сигналов с близким к прямоугольному спектром. Способ может также найти применение при обнаружении и определении временных параметров импульсных сигналов. В этом случае от выполнения операций по обработке сигнала во временной области следует перейти к выполнению аналогичных операций во временной области.
На момент подачи заявки в ФГУП «РНИИРС» разработано специальное программное обеспечение СПО вычислителя В 7 и выполнена его проверка на математических моделях и по реальному сигналу с близким к прямоугольному спектром. По результатам проверок установлено, что заявляемый способ обеспечивает работоспособность в условиях отсутствия априорной информации о частотных параметрах широкополосного сигнала, сохраняя при этом практически одинаковые со способом-прототипом [3] отношения сигнал/шум на входе решающей схемы, а следовательно, и одинаковые вероятностные характеристики, что говорит о достижении поставленной цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ многоканального обнаружения источника шумоподобного радиосигнала | 2020 |
|
RU2731130C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| Способ обнаружения несанкционированно установленных электронных устройств, использующих для передачи информации широкополосные сигналы | 2017 |
|
RU2652456C1 |
| Способ радиоподавления каналов связи | 2019 |
|
RU2716702C1 |
| СПОСОБ НЕПАРАМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ СИГНАЛОВ | 1999 |
|
RU2156475C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО РАСПОЗНАВАНИЯ РАДИОСИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2340910C2 |
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| Способ помехоустойчивой передачи данных до глобально удаленных объектов | 2021 |
|
RU2774894C1 |
Изобретение относится к области радиотехники и может быть использовано в системах радиомониторинга систем передачи и ретрансляции данных с широкополосными сигналами как с расширением, так и без расширения спектра. Технический результат изобретения - обнаружение широкополосного сигнала с близким к прямоугольному спектром в условиях отсутствия априорной информации о его частотных параметрах. Способ обнаружения шумоподобного сигнала состоит в приеме радиоизлучения с направления на контролируемую систему в полосе, много большей полосы сигнала, выполнение построения периодограммы [ƒi, Pi], где ƒi и Pi - соответственно частота и мощность смеси сигнала и шума или только шума в i-м параллельном канале; i∈[1, …, N], N - число частотных каналов; определение числа занимаемых сигналом частотных каналов N1, для чего для всех возможных значений N1 в зоне его неопределенности [N1min, …, N1max], где N1min и N1max - соответственно минимальное и максимальное число частотных каналов, занимаемых сигналом, вычисляют  где
где 
для каждого вычисленного значения  из элементов одноименного ему массива
из элементов одноименного ему массива  селектируют группу очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие
селектируют группу очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие  где ν - параметр, определяющий степень близости
где ν - параметр, определяющий степень близости  к
к 
фиксируют N1, соответствующее группе с минимальным K(N1), и определяют номер частотного канала j*∈[1, …, N-N1], соответствующий 
из элементов массива  для которых j<j*-N1 и j>j*+N1 формируют шумовой кластер и статистическим методом вычисляют для него математическое ожидание шума Pш и его дисперсию
для которых j<j*-N1 и j>j*+N1 формируют шумовой кластер и статистическим методом вычисляют для него математическое ожидание шума Pш и его дисперсию 
формируют массив  при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом;
при j∈[1, …, N-N1], где N1 - число частотных каналов, занимаемых сигналом;
переформируют массив  путем вычитания из каждого его элемента Pш;
путем вычитания из каждого его элемента Pш;
по дисперсии шума и заданной вероятности ложной тревоги определяют порог принятия решения Uпор;
по результатам сравнения  с Uпор принимают решение о наличии или отсутствии сигнала. 3 ил.
с Uпор принимают решение о наличии или отсутствии сигнала. 3 ил.
Способ обнаружения шумоподобного сигнала, при котором принимают радиоизлучение с направления на контролируемую систему в полосе, много большей полосы сигнала, выполняют построение периодограммы  , где
, где  и Pi - соответственно частота и мощность смеси сигнала и шума или только шума в i-м параллельном канале, i∈[i,…,N], N - число частотных каналов, формируют массив
и Pi - соответственно частота и мощность смеси сигнала и шума или только шума в i-м параллельном канале, i∈[i,…,N], N - число частотных каналов, формируют массив  при j∈[1,…,N-N1], где N1 - число частотных каналов, занимаемых сигналом, переформируют массив
при j∈[1,…,N-N1], где N1 - число частотных каналов, занимаемых сигналом, переформируют массив  путем вычитания из каждого его элемента математического ожидания шума Рш, по дисперсии шума и заданной вероятности ложной тревоги определяют порог принятия решения Uпор, по результатам сравнения
путем вычитания из каждого его элемента математического ожидания шума Рш, по дисперсии шума и заданной вероятности ложной тревоги определяют порог принятия решения Uпор, по результатам сравнения  с Uпор принимают решение о наличии или отсутствии сигнала, отличающийся тем, что перед формированием массива
с Uпор принимают решение о наличии или отсутствии сигнала, отличающийся тем, что перед формированием массива  определяют число занимаемых сигналом частотных каналов N1, для чего для всех возможных значений N1 в зоне его неопределенности [N1min,…,N1max], где N1min и N1max - соответственно минимальное и максимальное число частотных каналов, занимаемых сигналом, вычисляют
определяют число занимаемых сигналом частотных каналов N1, для чего для всех возможных значений N1 в зоне его неопределенности [N1min,…,N1max], где N1min и N1max - соответственно минимальное и максимальное число частотных каналов, занимаемых сигналом, вычисляют  , где
, где  , для каждого вычисленного значения
, для каждого вычисленного значения  из элементов одноименного ему массива
из элементов одноименного ему массива  селектируют группу очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие
селектируют группу очень близких к его значению элементов с фиксацией числа элементов в группе K(N1), для которых выполняется условие  , где ν - параметр, определяющий степень близости
, где ν - параметр, определяющий степень близости  к
к  , определяют N1, соответствующее группе с минимальным K(N1), и номер частотного канала j*∈[1,…,N-N1], соответствующий
, определяют N1, соответствующее группе с минимальным K(N1), и номер частотного канала j*∈[1,…,N-N1], соответствующий  , из элементов массива
, из элементов массива  , для которых j<j*-N1 и j>j*+N1 формируют шумовой кластер и статистическим методом вычисляют для него математическое ожидание шума Рш и его дисперсию
, для которых j<j*-N1 и j>j*+N1 формируют шумовой кластер и статистическим методом вычисляют для него математическое ожидание шума Рш и его дисперсию  .
.
| МУЗЫЧЕНКО Н.Ю | |||
| Метод обнаружения широкополосного сигнала по результатам параллельного частотного анализа в условиях неопределенности | |||
| Ж | |||
| Радиотехника | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Механический грохот | 1922 |
|
SU41A1 |
| ЕЛИСЕЕВ А.В | |||
| и др Периодограммный метод совместного обнаружения и оценивания частотных параметров широкополосного гауссовского сигнала в условиях параметрической неопределенности | |||
| Ж | |||
| Информационно-измерительные и управляющие системы, 2016, подписано в печать 24.02.2016, # 2, т.14, с.55-60 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ СИГНАЛОВ | 2011 |
|
RU2480901C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2169378C1 |
| Устройство обнаружения шумоподобных сигналов | 1988 |
|
SU1633508A2 |
| US 4074264 A1, 14.02.1978. | |||

