Способ относится к радиотехнике, а именно к способам определения местоположения источников радиоизлучения, и может быть использован для определения местоположения земных станций (ЗС) спутниковой связи (СС) посредством приема и обработки их сигналов, ретранслированных от космических аппаратов (КА), т.е. на земной станции определения местоположения (ЗCOM).
Известен способ определения местоположения ЗС СС по ретранслированному сигналу (см. Пат. РФ №2172495, МПК G01S 5/00 (2000.01), G01S 5/06 (2000.01). Опубл. 20.08.2001 г., бюл. №23).
В способе-аналоге принимают сигнал от ЗС на приемной земной станции (ПЗС), измеряют значения доплеровского сдвига несущей частоты сигнала для всей трассы «ЗС - спутник - ПЗС» в соответствующие моменты времени ti с шагом Δt, обрабатывают их. На основе обработки вычисляют значения доплеровского сдвига несущей частоты сигнала для трассы «ЗС - спутник». Общее число Q измеренных значений доплеровского сдвига частоты сигнала для трассы «ЗС - спутник - ПЗС» и вычисленных значений доплеровского сдвига частоты сигнала для трассы «ЗС - спутник» выбирают из условия  а значение Δt выбирают в пределах Δt=30…6000 с. Запоминают упомянутые Q значения и соответствующие им моменты времени ti. Вычисляют размер максимальной пеленгационной базы (ПБ), причем ПБ являются различные пары точек орбиты спутника, запоминают его. Группируют попарно все возможные сочетания ПБ на интервале упомянутых Q значений с шагом n=ΔT/Δt, где ΔT - временной шаг формирования ПБ. Сравнивают размеры ПБ в сгруппированных парах с пороговым значением, выделяют пары ПБ, в которых обе ПБ не короче порогового значения. Измеряют угол между ПБ в выделенных парах ПБ, сравнивают измеренный угол с пороговым значением. Выбирают пары ПБ, в которых измеренный угол между ними не менее порогового значения, и для каждой из выбранных пар ПБ интегрируют на соответствующем каждой ПБ интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы «ЗС - спутник». Определяют разностно-дальномерным способом (РДС) местоположение ЗС. А после определения местоположения запоминают координаты ЗС, усредняют запомненные координаты, а результат усреднения определяют как окончательное местоположение ЗС.
а значение Δt выбирают в пределах Δt=30…6000 с. Запоминают упомянутые Q значения и соответствующие им моменты времени ti. Вычисляют размер максимальной пеленгационной базы (ПБ), причем ПБ являются различные пары точек орбиты спутника, запоминают его. Группируют попарно все возможные сочетания ПБ на интервале упомянутых Q значений с шагом n=ΔT/Δt, где ΔT - временной шаг формирования ПБ. Сравнивают размеры ПБ в сгруппированных парах с пороговым значением, выделяют пары ПБ, в которых обе ПБ не короче порогового значения. Измеряют угол между ПБ в выделенных парах ПБ, сравнивают измеренный угол с пороговым значением. Выбирают пары ПБ, в которых измеренный угол между ними не менее порогового значения, и для каждой из выбранных пар ПБ интегрируют на соответствующем каждой ПБ интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы «ЗС - спутник». Определяют разностно-дальномерным способом (РДС) местоположение ЗС. А после определения местоположения запоминают координаты ЗС, усредняют запомненные координаты, а результат усреднения определяют как окончательное местоположение ЗС.
Недостатком способа-прототипа является высокий уровень погрешности при определении координат. Это обусловлено тем, что способ-прототип предполагает реализацию процедур измерения угла между ПБ в выделенных парах ПБ. На практике сложно обеспечить приемлемую точность данных измерений. Способ-аналог предполагает реализацию не менее 100 измерений значений доплеровского сдвига частоты сигнала. Кроме того, аналог обладает низкой помехозащищенностью, когда «зеркальный» КА получает сигналы на заданной для измерений частоте.
Известен способ определения местоположения земной станции спутниковой связи (см. Пат. РФ №2653866, МПК G01S 5/06 (2006.01), опубл. 16.05.2018, бюл. №14). Аналог предполагает одновременную регистрацию последовательности отсчетов уровней полезных сигналов ЗС ys(n) и побочных излучений x(n) , принимаемых на интервале наблюдения Тн ЗСМО, где n = 1, 2, …, N, N - номер отсчета с шагом Δt, s = 1, 2, …, s - номер КА с известными координатами. На основе сравнения ys(n) и x(n) формируют одномерные массивы: As с элементами As(k) - 1, если ys,k<ys,k-1, As(k) = 1 если ys,k>ys,k+1, As(k) = 0 если ys,k= ys+1 и В с элементами В(k) = 1, если xk<xk+1 В(k) = - 1, если xk > xk+1 В(k) = 0, если xk = xk+1 где k = 1, 2, …, N - 1. Для каждой пары массивов As и В суммируют полученные значения признаков и определяют количество совпадений элементов с одинаковыми индексами Ws. Местоположение источника побочных излучений (ИЛИ) определяют путем привязки к координатам ЗС СС, работающий через КА, подверженный воздействию побочных излучений.
Аналог обеспечивает упрощение реализации с устранением ограничения функциональности на территории с высокой плотностью размещения ЗС при определении местоположения ИПИ.
Способу-аналогу присущи недостатки, ограничивающие его применение. Реализация аналога предполагает наличие информации о точном местоположении ЗС СС, работающих через один КА. Низкая оперативность измерений обусловлена необходимостью выполнения Q измерений для получения одной координаты. Аналогу присуща низкая помехозащищенность в условиях воздействия помех, вызванных наличием сигналов от ЗС, официально использующих групповой спектр КА.
Наиболее близким по своей технической сущности к заявленному является способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу (см. Пат. РФ №2663193, МПК Н04K 3/00 (2003.01), опубл. 02.08.2018, бюл. №22). В способе-прототипе используют земную станцию определения местоположения в составе трех антенн Ант 1, Ант 2 и Ант 3, многоканального когерентного радиоприемника (РПУ) и радиопередатчика (РПД), с помощью которого формируют и излучают тестовый радиосигнал (ТРС) во всей полосе рабочих частот КА, когерентно принимают на интервале времени АТ с помощью РПУ и запоминают его ретранслированные копии не менее чем от трех космических аппаратов КА 1, КА 2 и КА 3 с известными координатами, находящимися в зоне электромагнитной доступности ЗСМО и ЗС. Сигналы КА через соответствующие им антенны Ант 1, Ант 2 и Ант 3 поступают на соответствующие входы многоканального когерентного РПУ. Компенсируют частотную нестабильность каждого из когерентных каналов многоканального РПУ. Вычисляют наклонную дальность от ЗСМО до КА 1, К А 2 и КА 3, на основе которой корректируют координаты космических аппаратов КА 1, КА 2 и КА 3. Осуществляют когерентный прием ретранслированных копий сигналов от заданной ЗС. Измеряют задержки в приеме сигналов ЗС Δτ1,2 и Δτ1,3 корреляционным методом с направлений на космические аппараты КА 1, КА 2 и КА 1, КА 3 соответственно. Запоминают полученные значения Δτ1,2 и Δτ1,3. Определяют местоположение ЗС разностно-дальномерным способом.
Прототип обеспечивает снижение погрешности измерения координат ЗС за счет исключения процедур измерения значений доплеровского сдвига частоты сигнала и связанных с ними процедур измерения угла между ПБ в выделенных парах пеленгаторных баз.
Однако прототипу присущи недостатки, ограничивающие его применение. Основным из них является низкая помехозащищенность. Появление в заданной части спектра j-го «зеркального» КА сигнала j-й ЗС резко ухудшает сигнально-помеховую обстановку. Сигнал ЗС на КА приходит по боковому лепестку диаграммы направленности (ДН) и значительно уступает по мощности сигналу j-й ЗС, ретранслированному КА. Поэтому прототип в большинстве случаев теряет работоспособность. Кроме того, имеет место ситуация, когда сигнал ЗС приходит на «основной» КА по основному лепестку ДН в условиях низкого соотношения сигнал / шум.
Целью заявляемого технического решения является разработка способа определения местоположения земной станции спутниковой связи по ретранслированному сигналу посредством РДС, обеспечивающего повышение помехозащищенности измерения координат ЗС за счет использования процедуры выделения помехового сигнала и его вычитания из группового спектра.
Поставленная цель достигается тем, что используют земную станцию определения местоположения в составе трех антенн Ант 1, Ант 2 и Ант 3, многоканального когерентного радиоприемника и радиопередатчика, формируют и излучают РПД тестовый радиосигнал во всей полосе рабочих частот KAΔF, осуществляют когерентный прием РПУ на интервале времени ΔT и запоминают его ретранслированные копии не менее чем от трех космических аппаратов КА 1, КА 2 и КА 3 с известными координатами, находящимися в зоне электромагнитной доступности ЗСМО и ЗС, сигналы КА через соответствующие антенны Ант 1, Ант 2 и Ант 3 поступают на соответствующие входы многоканального когерентного РПУ и используют для компенсации частотной нестабильности каждого из когерентных каналов многоканального РПУ по результатам приема ТРС, вычисляют наклонную дальность от ЗCOM до КА 1, КА 2 и КА 3, корректируют на их основе координаты космических аппаратов КА 1, КА 2 и КА 3, осуществляют когерентный прием ретранслированных копий сигналов от заданной ЗС, измеряют задержки в приеме сигналов ЗС Δτ1,2 и Δτ1,3 корреляционным методом с направлений на космические аппараты КА 1, КА 2 и КА 1, КА 3 соответственно, запоминают полученные значения Δτ1,2 и Δτ1,3, определяют местоположения ЗС разностно-дальномерным способом. Перед каждым измерением координат ЗС формируют и излучают ТРС в заданной полосе частот ΔFj. Сравнивают заранее измеренные и запомненные шумовые уровни Pj(ΔFi)=2,3, выбранных j-ых КА с их текущим уровнем Fjтек ΔFi) В случае превышения приращения уровня шумов в j-м КА ΔPj(ΔFi) порогового уровня Δd,ΔPj(ΔFi)>Δd, принимают решение о появлении в полосе частот ΔFi сигналов j-й ЗС, ретранслированных j-м КА. Выделяют обнаруженные сигналы Sj(ΔFi) j-го КА и вычитают их из совокупности  сигналов j-го КА:
сигналов j-го КА:  где
где  - совокупность сигналов земной станции, координаты которой подлежат определению, и шумов, а измерение задержки Δτ1,j выполняют корреляционным методом с использованием в качестве сигналов j-го КА
- совокупность сигналов земной станции, координаты которой подлежат определению, и шумов, а измерение задержки Δτ1,j выполняют корреляционным методом с использованием в качестве сигналов j-го КА 
При этом выделение обнаруженных сигналов j-й ЗС и ретранслированных j-м КА осуществляют с помощью адаптивной фильтрации путем выполнения на первом этапе оценки его основных характеристик: рабочей полосы частот, значения несущей частоты, вида модуляции и манипуляции, скорости манипуляции, и на их основе демодуляции сигнала, с последующим восстановлением обнаруженных сигналов на втором этапе с точностью до фазы.
В случае использования сигналов с временным разделением каналов или псевдослучайной перестройкой рабочей частоты, которые не подлежат восстановлению, выделение сигналов j-й ЗС, ретранслированных j-м КА, не осуществляют.
Заявляемый способ поясняется чертежами:
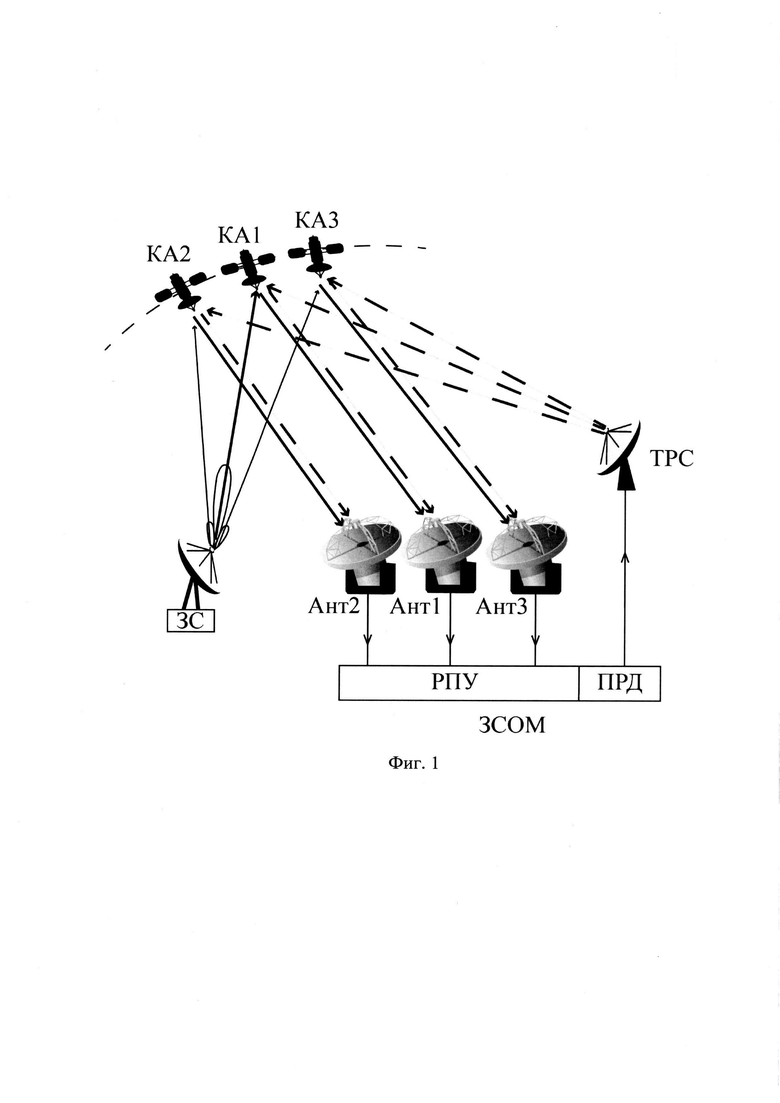
на фиг. 1 показаны условия, когда в зоне ЭМД ЗС и ЗСМО находятся три космических аппарата КА 1, КА 2 и КА 3, работающие в режиме ретрансляции сигналов. Здесь пунктирной линией показаны трассы прохождения ТРС, а сплошной линией - трассы прохождения сигнала ЗС, ретранслированного от КА 1, КА 2 и КА 3;
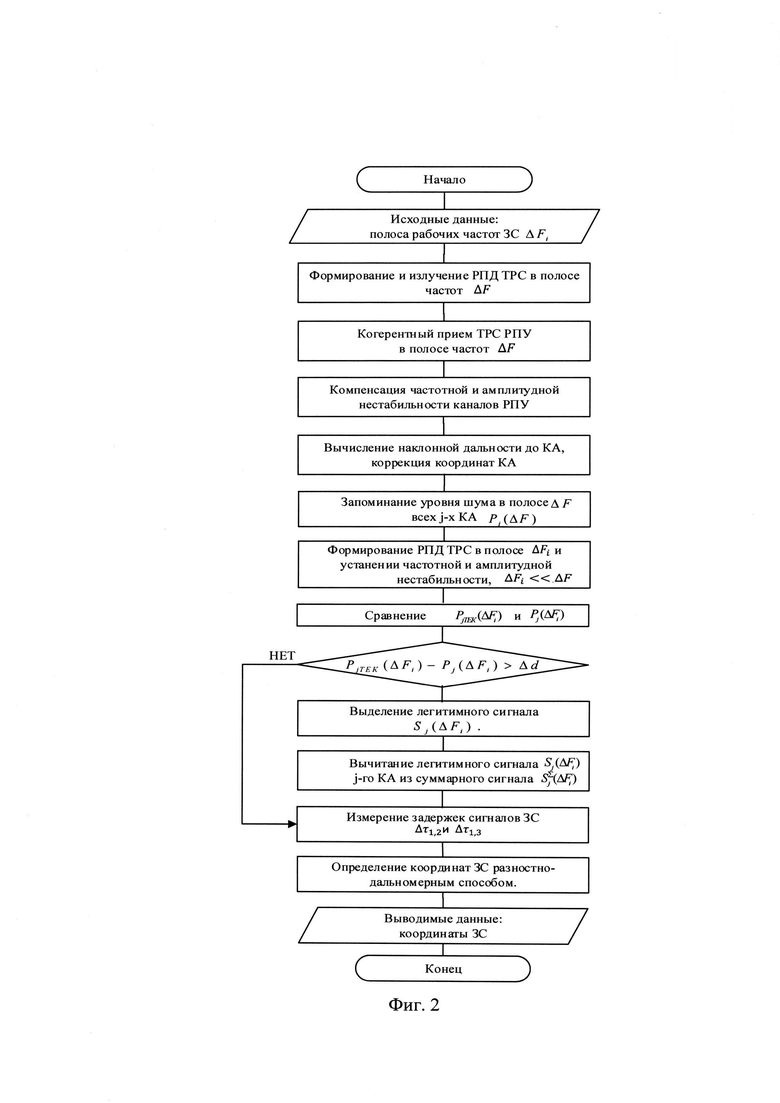
на фиг. 2 приведен обобщенный алгоритм определения местоположения земной станции спутниковой связи по ретранслированному каналу;
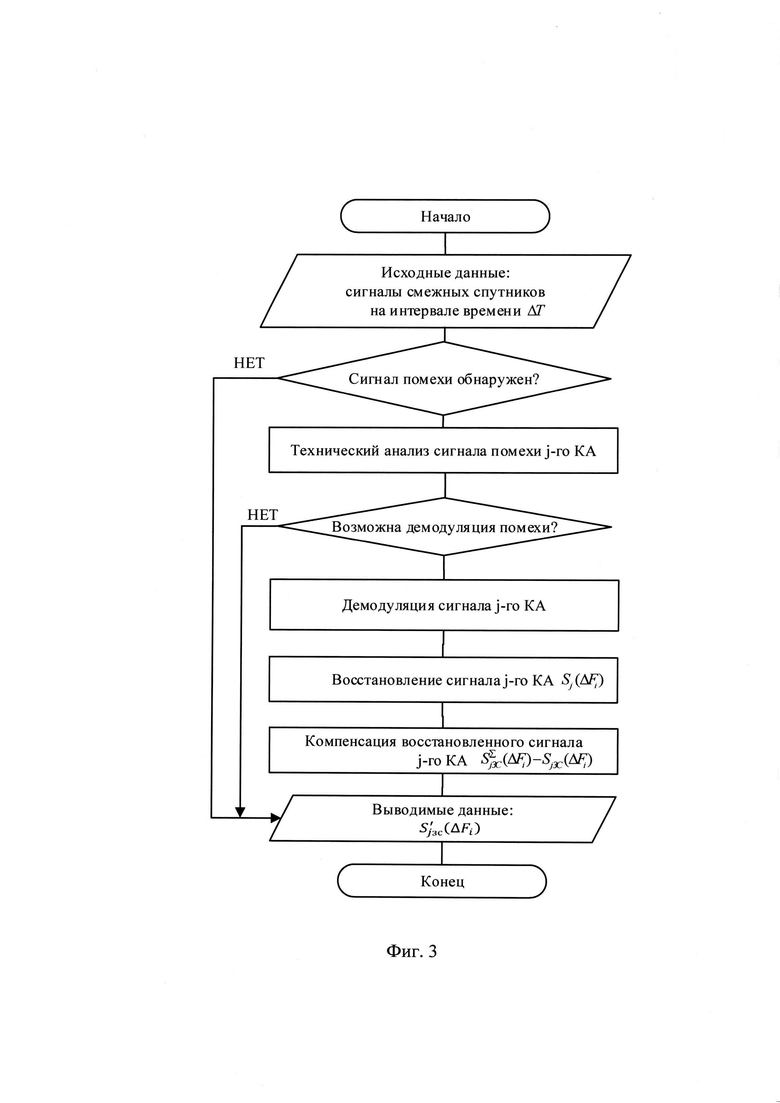
на фиг. 3 приведен обобщенный алгоритм вычитания помеховых сигналов Sj(ΔFi) из группового спектра КА;
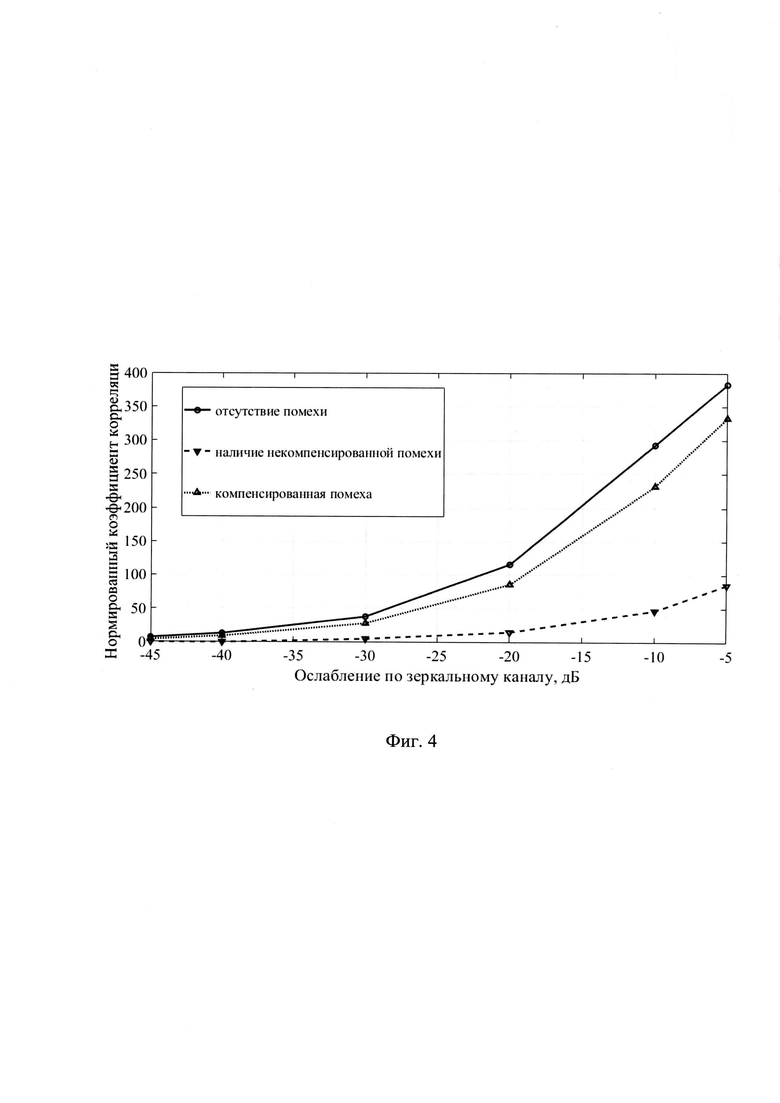
на фиг. 4 показаны результаты моделирования предлагаемого способа для раз- личных ситуаций определения координат ЗС.
Сущность предлагаемого способа состоит в следующем. Для устойчивого по- лучения корреляционного пика сигналов основного и «зеркального» КА необходимо выполнение следующих условий: соотношение сигнал / шум в основном спутнике должно быть достаточно высоким, в то время как в «зеркальном» КА соотношение шум / сигнал должно быть ниже

где Wmin - по результатам экспериментов составляет ~50 дБ.
Например, если сигнал под шумами в «зеркальном» КА находится на уровне - 50 дБ, а соотношение сигнал / шум в основном спутнике составляет 8 дБ, то энергетика геолокации составит 42 дБ, что обеспечит построение линии положения. Пусть в полосе ΔFi сигнала ЗС с измеряемыми координатами на «зеркальном» КА присутствует свой полезный сигнал, например, мощностью 30 дБ. В результате суммарная мощность в «зеркальном» КА составляет 80 дБ, а энергетика геолокации 72 дБ. В результате построение линии положения не обеспечивается. Аналогичная проблема возникает в условиях низкого соотношения сигнал / шум Wосн→0 в спектре основного КА, на который сигнал ЗС будет приходить по основному лепестку ДН.
В предлагаемом способе первая из рассмотренных ситуаций устраняется путем выделения из группового спектра мешающего сигнала Sj(ΔFi) (сигнала собственной ЗС «зеркального» КА) с помощью фильтрации с последующим вычитанием его из группового спектра 

где Sj(ΔFi) - сигнал j-го КА (помеховый сигнал),  - совокупность сигналов земной станции с оцениваемыми координатами и шумов. В результате становится возможным измерение задержек Δτ1,2 и Δτ1,3 при отсутствии помехового сигнала Sj(ΔFi).
- совокупность сигналов земной станции с оцениваемыми координатами и шумов. В результате становится возможным измерение задержек Δτ1,2 и Δτ1,3 при отсутствии помехового сигнала Sj(ΔFi).
Предельно допустимая эффективность применения известных методов помехоустойчивости ограничивается современным уровнем развития элементной базы и составляет 30-40 дБ (см. Никитченко В.В., Смирнов П.Л. Оценка пространственно-поляризационных параметров сигналов и помех при приеме излучений с псевдослучайной перестройкой рабочей частоты//Радиотехника и электроника. Т. 35, №4, с. 767-774, 1990). Повышение помехоустойчивости может быть достигнуто различными путями, из которых наиболее эффективным является применение многоканальных компенсаторов помех (Комарович В.В., Никитченко В,В. Широкополосные адаптивные компенсаторы помех. - Л: ВАС, 1988. - 116 с.)
В настоящее время широкое распространение получили мультиспутниковые системы геолокации, использующие два или более КА (см. фиг. 1) при определении местоположения ЗС. Для их функционирования необходимо выполнение ряда требований. К последним относятся: наличие как минимум двух дополнительных спутников-ретрансляторов («зеркальных» КА), которые имеют одинаковые частоты восходящей линии связи, поляризацию антенной системы и зону покрытия. Кроме того, требуется знание точного положения всех задействованных в измерениях КА.
Мультимедийная архитектура определения местоположения ЗС предполагает использование разностно-дальномерного, разностно-доплеровского способов или их комбинаций (см. Chan М. Application of a dual satellite geolocation system on location sweeping interference // World Academy of Science, Engineering Technology. - 2012. T. 6, # 9, p. 1029-1034).
Спутник-ретранслятор КА 1 является «основным», так как он обеспечивает ретрансляцию сигнала по основному лепестку ДН. Второй и третий КА являются смежными, находятся на некотором удалении от КА 1 и способны передавать то же излучение, полученное по боковым лепесткам ДН ЗС, но с большим затуханием. Если ЗCOM находится в зоне ЭМД, формируемой антенными системами названных КА (см. фиг. 1), то ее многоканальное РПУ сможет принимать сигналы от этих КА. Для этого к каждому каналу многоканального РПУ подключены антенны, направленные на соответствующие КА, чем и обеспечивают прием заданных сигналов ЗС, ретранслированных от КА 1, КА 2 и КА 3.
Перед началом измерений определяют уровень шумов Pj(ΔF) на выходе каждого j-го КА (j-го канала РПУ) во всей полосе его рабочих частот ΔF. Полученные значения Pj(ΔF) запоминают.
В интересах повышения точности измерения координат ЗС (см. фиг. 2) аналогично с прототипом корректируют значение наклонной дальности от ЗCOM до КА 1, КА 2 и КА 3, компенсируют частотные нестабильности когерентных каналов многоканального РПУ. С этой целью формируют ТРС с известными параметрами и излучают посредством РПД. После его ретрансляции от КА посредством Ант 1, Ант 2 и Ант 3 принимают когерентным РПУ и с помощью процедур корреляции (излученного ТРС и его принятых ретранслированных копий) вычисляют величины задержек, характеризующие наклонную дальность от ЗСМО, соответственно, до КА 1, КА 2 и КА 3.
Наклонную дальность между ЗСМО и j-м КА рассчитывают по формуле

где  - рассчитанное значение задержки принятого после ретрансляции ТРС через j-й КА, с - скорость света. Кроме того, по результатам искажений принятых версий ретранслированного ТРС, полученных при прохождении соответствующих трактов приема многоканального РПУ, выполняют коррекцию амплитудно-частотных характеристик каждого из приемных каналов в полосе частот ΔF. Реализация этих процедур известна (см. Пат. РФ №2172495, МПК G01S 5/00 (2000.01), G01S 5/06 (2000.01), опубл. 20.08.2001, бюл. №23); Волков Р.В. и др. Основы построения и функционирования разностно-дальномерных систем координатометрии источников радиоизлучения. - СПб: ВАС, 2013. - 116 с.). В свою очередь, определение зон ЭМД, формируемых антенными системами КА, известно (см. Челышев В.Д., Якимовец В.В. Радиоэлектронные системы административного и военного управления. Часть первая. Радиоинтерфейсы систем мобильного радиосервиса: Учебник. - СПб: ВАС, 2006. - 576 с.).
- рассчитанное значение задержки принятого после ретрансляции ТРС через j-й КА, с - скорость света. Кроме того, по результатам искажений принятых версий ретранслированного ТРС, полученных при прохождении соответствующих трактов приема многоканального РПУ, выполняют коррекцию амплитудно-частотных характеристик каждого из приемных каналов в полосе частот ΔF. Реализация этих процедур известна (см. Пат. РФ №2172495, МПК G01S 5/00 (2000.01), G01S 5/06 (2000.01), опубл. 20.08.2001, бюл. №23); Волков Р.В. и др. Основы построения и функционирования разностно-дальномерных систем координатометрии источников радиоизлучения. - СПб: ВАС, 2013. - 116 с.). В свою очередь, определение зон ЭМД, формируемых антенными системами КА, известно (см. Челышев В.Д., Якимовец В.В. Радиоэлектронные системы административного и военного управления. Часть первая. Радиоинтерфейсы систем мобильного радиосервиса: Учебник. - СПб: ВАС, 2006. - 576 с.).
Далее в течение интервала времени ΔТ осуществляют параллельный когерентный прием ретранслированных КА копий сигналов в полосе частот в полосе ΔFi от заданной ЗС. Реализация данной процедуры широко освещена в литературе (см. Андронов И.С., Финк Л.М. Передача дискретных сообщений по параллельным каналам. - М.: Сов. Радио, 1971. - 406 с.).
После этого измеряют уровень шумов Pj(ΔFi) на выходе каждого j-го КА. Эту операцию выполняют перед каждым очередным измерением координат ЗС, но в заданной полосе частот ΔFi. В случае превышения приращения уровня шумов в j-м КА ΔPj(ΔFi) порогового уровня Δd,ΔPj(ΔFi)>Δd,ΔPj(ΔFi)=Pjтек(ΔFi)-Pj(ΔFi), принимают решение о появлении в полосе частот ΔFi, сигнала j-й ЗС, ретранслированного j-м КА.
Возможна ситуация, когда при выполнении первичной оценки уровня шума Рjтек (ΔFi) в полосе частот ΔFi уже отмечалось излучение j-й ЗС, ретранслированное j-м КА. Решение о наличии сигнала j-й ЗС принимают путем сравнения среднего (интегрального) уровня шумов в полосе AF j-го КА  с уровнем шум + сигнал в полосе ΔFi Pj (ΔFi).
с уровнем шум + сигнал в полосе ΔFi Pj (ΔFi).
При выполнении пороговых условий

где Δd - заданный на подготовленном этапе пороговый уровень, принимают решение о наличии сигнала j-й ЗС. Наличие этого сигнала в полосе ΔFi j-го КА делает невозможным измерение координат ЗС. Выходом из создавшейся ситуации является выделение и вычитание этого сигнала Si(ΔFi) из совокупности 
Выделение сигнала j-й ЗС осуществляют с помощью адаптивной фильтрации путем выполнения на первом этапе оценки его основных характеристик: рабочей полосы частот ΔFρ, значения несущей частоты ƒн, вида модуляции и манипуляции, ско- рости манипуляции и на их основе демодуляции сигнала. Реализация этих операций известна и сложностей не вызывает (см. Пат. РФ №2619716, №2627846, №2619717, №2665235, МПК G06N 3/02, Н04227/32, №2423735, МПК G06K 9/00). На основе полученных данных на втором этапе принятый на интервале ΔТ сигнал j-й ЗС Sj(ΔFi) восстанавливают с точностью до фазы.
На следующем этапе вычитают сформированный сигнал Sj(1Fi) из совокупности  сигналов j-го КА
сигналов j-го КА

где  - совокупность сигналов ЗС, координаты которой подлежат определению, и шумов в полосе частот ΔFi j-го КА.
- совокупность сигналов ЗС, координаты которой подлежат определению, и шумов в полосе частот ΔFi j-го КА.
Выполнение операции (5) освещено в литературе (см. Широкополосные адаптивные компенсаторы помех. Комарович В.Ф., Никитченко В.В. - Л.: ВАС, 1988. - 116 с.; Никитченко В.В., Смирнов П.Л. Комбинированные методы помехозащиты (использование адаптивных антенных систем и сигналов с псевдослучайной перестройкой рабочей частоты) // Зарубежная радиоэлектроника, №5,1988 г., С. 24-31).
Операцию вычитания обнаруженного сигнала j-й ЗС целесообразно выполнять с помощью блока CDM-750 фирмы Comtech EF (littp://www.comtechefdata.com/files/datasheets/dc-cdm750.pdf. Дата обращения 24.07.2020). В изделии используется новая технология оптимизации спутниковой связи DoubleTalk® (СиС - Carrier in Carrier - Несущая в несущей), позволяющая реализовать названные функции. Подавление нежелательного сигнала колеблется в пределах от 25 до 35 дБ. Остаточный сигнал проявляется как шум, вызывающий небольшое ухудшение параметра сигнал/шум.
В результате выполнения названных операций становится возможным определение временных задержек Δτ1,2 и Δτ1,3, которые выполняют в условиях отсутствия мешающих измерениям сигналов j-й ЗС и ретранслированных j-м КА.
Определение местоположения ЗС РДС выполняют аналогично способу-прототипу. Для этого используют алгоритм, применяемый для позиционных способов координатометрии (см. Дворников СВ., Саяпин В.Н., Симонов А.Н. Теоретические основы координатометрии источников радиоизлучений. - СПб.: ВАС, 2007).
Последний включает следующие этапы:
измерение одного из координатно-информационных параметров (КИП) радиосигналов ЗС, ретранслированных КА;
определение параметров положения, соответствующих каждому КИП;
построение линий (поверхностей) положения по его параметрам;
определение местоположения ЗС на поверхности линий (поверхностей) положения.
Физические координаты ЗС находят из системы уравнения, приведенной в Пат. РФ №2663193, стр. 6, решение которой известно (см. Севидов В.В. Варианты реализации разностно-дальномерного метода определения координат земных станций по сигналам спутников-ретрансляторов в сборнике: «Радиотехника, электроника и связь (РЭиС - 2005). Международная научно-техническая конференция. 2015. С. 303-308). - СПб.: ВАС, 2015. С. 303-308).
Выполнен анализ эффективности предлагаемого способа для различных возможных ситуаций определения координат ЗС: наличие некомпенсированной помехи, помеха компенсирована и помеха изначально отсутствовала. Результаты получены на основе моделирования в среде Матлаб (см. фиг. 4). Исходными данными для моделирования являются: отношение сигнал/шум для основного КА  ослабление сигнала на «зеркальных» КА
ослабление сигнала на «зеркальных» КА  отношение сигнал/шум для помехового сигнала
отношение сигнал/шум для помехового сигнала  ЗС в «зеркальном» канале приема. Рассмотрены представляющие практический интерес значения
ЗС в «зеркальном» канале приема. Рассмотрены представляющие практический интерес значения  Полоса частот, занимаемая сигналами ЗС и помехи (КА) полагается равной 1 МГц. Моделирование выполнено на интервале ΔT=1с, вид модуляции QPSK.
Полоса частот, занимаемая сигналами ЗС и помехи (КА) полагается равной 1 МГц. Моделирование выполнено на интервале ΔT=1с, вид модуляции QPSK.
На фиг. 4 приведены результаты моделирования - зависимость максимального уровня корреляционной функции от ослабления по «зеркальному» каналу для случаев отсутствия помехи по «зеркальному» каналу приема, наличию некомпенсированной помехи и ситуации, когда помеха была скомпенсирована. Полученные результаты иллюстрируют преимущество предлагаемого способа по сравнению с прототипом в условиях сложной сигнально-помеховой обстановки. При уменьшении ослабления сигнала ЗС по «зеркальному» каналу приема выигрыш от использования предлагаемого способа существенно возрастает.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2755058C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2017 |
|
RU2663193C1 |
| Способ и устройство активной радиомаскировки местоположения земной станции | 2019 |
|
RU2707878C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| Способ и система блокирования несанкционированного канала передачи информации от радиопередатчика земного базирования на космический аппарат | 2017 |
|
RU2666785C1 |
| Способ выбора космическим аппаратом земной станции для установления высокоскоростной связи на остронаправленных антенных системах в диапазонах, радиопрозрачность которых зависит от состояния атмосферы | 2023 |
|
RU2822689C1 |
Изобретение относится к радиотехнике, а именно к способам определения местоположения (ОМП) источников радиоизлучения, и может быть использовано для определения местоположения земных станций (ЗС) спутниковой связи. Технический результат состоит в повышении помехозащищенности измерения координат ЗС спутниковой связи за счет использования выделения помехового сигнала и его вычитания из группового спектра. Для этого на подготовительном этапе компенсируют частотные нестабильности каждого из когерентных каналов многоканального радиоприемного устройства, по результатам измерений наклонных дальностей уточняют местоположение космических аппаратов (КА). В процессе измерения на земной станции определения местоположения принимают ретранслированный от не менее чем трех космических аппаратов сигнал ЗС, оценивают сигнально-помеховую обстановку в заданной полосе частот  в каждом КА, при наличии сигналов j-й ЗС в полосе
в каждом КА, при наличии сигналов j-й ЗС в полосе  j-го КА, которые являются помеховыми при выполнении измерений, выделяют их, а в процессе дальнейшей обработки из группового спектра j-го КА вычитают сигналы j-й ЗС, рассчитывают задержки в приеме сигналов
j-го КА, которые являются помеховыми при выполнении измерений, выделяют их, а в процессе дальнейшей обработки из группового спектра j-го КА вычитают сигналы j-й ЗС, рассчитывают задержки в приеме сигналов  в условиях компенсации помеховых сигналов, определяют координаты заданной ЗС разностно-дальномерным способом. 2 з.п. ф-лы, 4 ил.
в условиях компенсации помеховых сигналов, определяют координаты заданной ЗС разностно-дальномерным способом. 2 з.п. ф-лы, 4 ил.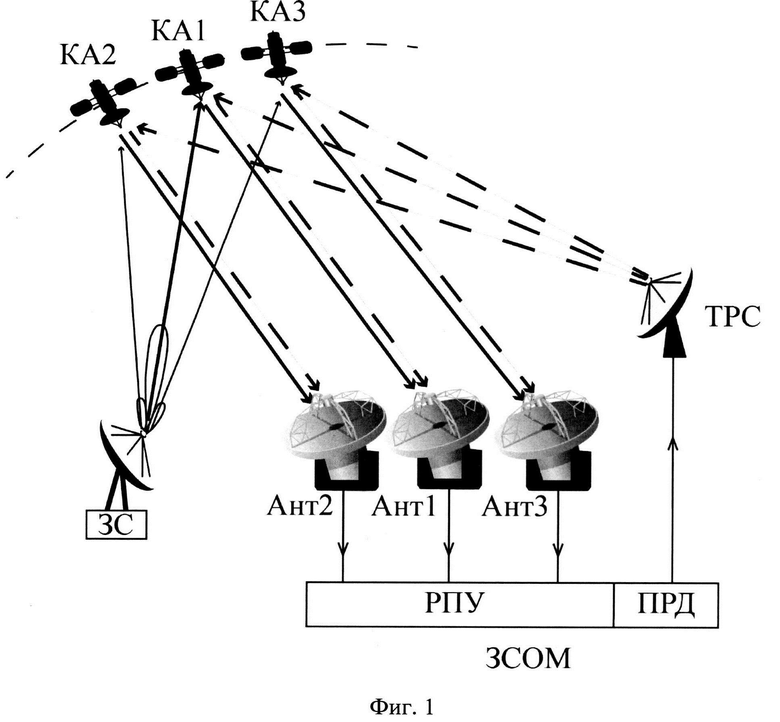
1. Способ определения местоположения земной станции (ЗС) спутниковой связи (СС) по ретранслированному сигналу от космических аппаратов (КА), заключающийся в использовании земной станцией определения местоположения (ЗСМО) в составе трех антенн Ант 1, Ант 2 и Ант 3, многоканального когерентного радиоприемника (РПУ) и радиопередатчика (РПД), формировании и излучении РПД тестового радиосигнала (ТРС) во всей полосе рабочих частот КА AF и когерентном приеме РПУ на интервале времени ΔT и запоминании его ретранслированных копий не менее чем от трех космических аппаратов КА 1, КА 2 и КА 3 с известными координатами, находящимися в зоне электромагнитной доступности ЗСМО и ЗС, сигналы которых через соответствующие антенны Ант 1, Ант 2 и Ант 3 поступают на соответствующие входы многоканального когерентного РПУ, компенсации частотной нестабильности каждого из когерентных каналов многоканального РПУ по результатам приема ТРС, вычислении наклонной дальности от ЗСОМ до КА 1, КА 2 и КА 3, корректировании на их основе координат космических аппаратов КА 1, КА 2 и КА 3, когерентном приеме ретранслированных копий сигналов от заданной ЗС, измерении задержки в приеме сигналов ЗС  и
и  корреляционным методом с направлений на космические аппараты КА 1, КА 2 и КА 1, КА 3 соответственно, запоминании полученных значений
корреляционным методом с направлений на космические аппараты КА 1, КА 2 и КА 1, КА 3 соответственно, запоминании полученных значений  и
и  определении местоположения ЗС разностно-дальномерным способом, отличающийся тем, что перед каждым измерением координат ЗС формируют и излучают ТРС в заданной полосе частот
определении местоположения ЗС разностно-дальномерным способом, отличающийся тем, что перед каждым измерением координат ЗС формируют и излучают ТРС в заданной полосе частот  устраняют частотную нестабильность каждого из когерентных каналов, сравнивают заранее измеренные и запомненные шумовые уровни
устраняют частотную нестабильность каждого из когерентных каналов, сравнивают заранее измеренные и запомненные шумовые уровни  выбранных j-х КА в полосе частот
выбранных j-х КА в полосе частот  с их текущим уровнем
с их текущим уровнем  в случае превышения приращения уровня шумов в j-м КА
в случае превышения приращения уровня шумов в j-м КА  порогового уровня
порогового уровня  принимают решение о появлении в полосе частот
принимают решение о появлении в полосе частот  сигналов, j-й ЗС, ретранслированных j-м КА, выделяют обнаруженные сигналы j-й ЗС
сигналов, j-й ЗС, ретранслированных j-м КА, выделяют обнаруженные сигналы j-й ЗС  -го КА и вычитают их из совокупности
-го КА и вычитают их из совокупности  сигналов j-го КА:
сигналов j-го КА:
 где
где  - совокупность сигналов земной станции, координаты которой подлежат определению, и шумов, а измерение задержки
- совокупность сигналов земной станции, координаты которой подлежат определению, и шумов, а измерение задержки  выполняют корреляционным методом с использованием в качестве сигналов j-го КА
выполняют корреляционным методом с использованием в качестве сигналов j-го КА 
2. Способ по п. 1, отличающийся тем, что выделение обнаруженных сигналов j-й ЗС и ретранслированных j-м КА осуществляют с помощью адаптивной фильтрации путем выполнения на первом этапе оценки его основных характеристик: рабочей полосы частот, значения несущей частоты, вида модуляции и манипуляции, скорости манипуляции, и на их основе демодуляции сигнала, с последующим восстановлением обнаруженных сигналов на втором этапе с точностью до фазы.
3. Способ по п. 2, отличающийся тем, что в случае использования сигналов с временным разделением каналов или псевдослучайной перестройкой рабочей частоты, которые не подлежат восстановлению, выделение сигналов j-й ЗС, ретранслированных j-м КА, не осуществляют.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2000 |
|
RU2172495C1 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2653866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2017 |
|
RU2663193C1 |
| EP 0869373 A2, 07.10.1998 | |||
| US 5659487 A, 19.08.1997 | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

