Предлагаемое изобретение относится к средствам радиомониторинга электронного оборудования и может быть использовано для обнаружения несанкционированно установленных радиоэлектронных устройств, использующих широкополосные сигналы (ШПС).
Широкополосными сигналами (ШПС) называют такие сигналы, у которых произведение ширины спектра F на длительность Т много больше единицы. Это произведение называется базой сигнала и обозначается В, т.е.

У ШПС В>>1. Широкополосные сигналы иногда называют сложными в отличие от простых сигналов с В=1. Поскольку у сигналов с ограниченной длительностью спектр имеет неограниченную протяженность, то для определения ширины спектра используют различные методы и приемы. Для реальных ШПС, состоящих из конечного числа элементов, всегда можно однозначно определить и F, и В.
Широкополосные сигналы получили широкое применение в системах связи, так как:
- обеспечивают высокую помехозащищенность систем связи;
- позволяют организовать одновременную работу многих абонентов в общей полосе частот при асинхронно-адресном принципе работы системы связи, основанном на кодовом разделении абонентов;
- позволяют успешно бороться с многолучевым распространением радиоволн путем разделения лучей;
- обеспечивают совместимость передачи информации с измерением параметров движения объекта в системах подвижной связи;
- обеспечивают электромагнитную совместимость (ЭМС) ШСС с узкополосными системами радиосвязи и радиовещания, системами телевизионного вещания;
- обеспечивают лучшее использование спектра частот на ограниченной территории по сравнению с узкополосными системами связи;
- обеспечение скрытности передачи за счет использования сигналов с малой спектральной плотностью мощности;
- трудность расшифровки сообщений при подслушивании.
Это приводит к возможности применения данных методов для скрытия излучения средств негласного съема информации и, соответственно, к усложнению поиска радиоканалов средств негласного съема информации.
Системы связи с применением широкополосных сигналов описаны в ряде статей и патентов.
Известен патент US 6925109. Method and system for fast acquisition of ultra-wideband signals. James L. Richards, Mark D. Roberts. 02.08.2005, сущность метода в котором состоит в использовании любой части многолучевого распространения кодовой последовательности импульсного радиосигнала. За счет увеличенного импульсного потока многолучевого радиосигнала возникает возможность корреляционной обработки с образцовым импульсным потоком, и при их совпадении система входит в синхронизм.
Недостатками данной системы являются неработоспособность в мобильном исполнении, так как условие многолучевости непредвиденно изменяется в зависимости от дальности и относительного положения приемника и передатчика, а также необходимость обработки с образцовым импульсным потоком, априорная известность параметров сигнала, что исключено в случае поиска средств негласного съема информации.
Примерами также могут служить устройства сверхширокополосной (СШП) импульсной системы связи, защищенные патентами США: US 4641317 Spread Spectrum Radio Transmission System. Larry W. Fullerton. 03.12.84; US 5677927 Ultra wide - Band Communication System and Method. Larry W. Fullerton; Ivan A. Cowie. 14.10.1997; US 5687169 Full Duplex Ultra wide - Band Communication System and Method. Larry W. Fullerton. 24.11.1997. Эти системы импульсной радиосвязи для передачи информации используют одну или несколько импульсных поднесущих. В импульсном радиоприемнике используется кросс-коррелятор, осуществляющий свертку близких по форме входного сигнала с эталонным сигналом, состоящих из ста пятидесяти-двухсот импульсов, засинхронизированных по времени с известным кодом передатчика.
Однако при этом накладываются ограничения на уровень искажения формы принимаемого сигнала, так как при распространении СШП сигнала форма его изменяется в зависимости от расстояния приемопередачи. Из-за широкой полосы частот и сверхкороткой длительности импульсов требования к точности синхронизации в этих системах необычайно высоки. В этих известных СШП системах сигналы синхронизации и автоподстройки связаны между собой и с основными информационными сигналами на одном энергетическом уровне, а так как спектральная плотность всех сигналов находится на уровне шумов, то система в значительной степени подвержена сбоям.
К недостатку также можно отнести необходимость сравнения с эталонным сигналом, априорная известность параметров сигнала, что невозможно в случае поиска средств негласного съема информации.
Известна более современная система: US 6925108. Ultrawide bandwidth system and method for fast synchronizaton. Timothy R. Miller. 02.08.2005. Метод идентификации фазы входного СШП сигнала заключается в следующем: на многоканальный коррелятор поступают принимаемые импульсы и импульсы с различными временными промежутками между ними, которые соответствуют отдельным временным промежуткам опорной кодовой последовательности. При совпадении любого указанного промежутка (фазовый интервал) один из корреляторов формирует первый максимум. При очередном совпадении на втором фазовом интервале второй коррелятор формирует второй максимум. Если второй максимум выше первого максимума, то применяется решение о запуске опорной импульсной последовательности, и система входит в синхронизм. К недостаткам можно отнести работоспособность синхронизации этой системы связи только при большом отношении сигнал/помеха на входе приемного устройства.
К недостаткам также можно отнести необходимость знания опорной кодовой последовательности, априорную известность параметров сигнала, что невозможно в случае поиска средств негласного съема информации.
Известен патент RU 231424. Система связи с высокой скоростью передачи информации сверхширокополосными сигналами. Бондаренко В.В., Кыштымов Г.А., Бондаренко В.В., Кыштымов С.Г., 20.01.2008, сущность поиска и обнаружения сигнала в котором состоит в двукратной передаче синхросигнала, состоящего из импульсного широкополосного сигнала и гармонического сигнала.
Недостатками данной системы являются необходимость знания основной частоты работы системы, необходимость знания синхропоследовательности, априорная известность параметров сигнала, что невозможно в случае поиска средств негласного съема информации.
Известна система связи (устройство): П.А. Сторожев, А.С. Григорьев. СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ С МАЛЫМ ОТНОШЕНИЕМ СИГНАЛ/ШУМ, Труды ТГТУ: Сборник научных статей молодых ученых и студентов. / Тамб. гос. техн. ун-т. - Тамбов, 2007. - Вып. 20, стр. 141. В данной системе реализован способ автокорреляционного приема широкополосных шумоподобных сигналов, который заключается в том, что принятый сигнал перемножается с его задержанной на время Т копией, время Т совпадает с периодом повторения переданного широкополосного шумоподобного сигнала. Результат усредняется за время, равное длительности (n-1) элементов сигнала, где n - число переданных повторяющихся элементов за время длительности бита. По результату усреднения принимается решение о наличии или отсутствии сигнала.
Особенность данного способа заключается в том, что если на входе приемника присутствует лишь шум, имеющий случайный характер, то на выходе будет результат, пропорциональный значению автокорреляционной функции шума с временем сдвига, равным Т, математическое ожидание этого результата равно нулю. Если на входе приемника, помимо шума, присутствует полезный сигнал, то напряжение на выходе приемника будет пропорционально энергии этого сигнала за время усреднения. Накопление энергии сигнала позволяет произвести его обнаружение, даже если по уровню он не превосходит шум.
При построении системы связи применены две ветви для обнаружения (детектирования) и различения логических сигналов 0 и 1, настроенные, соответственно, на шумоподобные сигналы с различными периодами повторениями Т1 и Т2.
Недостатком данного способа является необходимость априорных знаний о длительности переданного сигнала, его периодах повторения.
Наиболее близким к заявленному способу является способ определения местоположения несанкционированно установленных на объекте электронных устройств по патенту РФ 255833 (Закалкин П.В., Савченко Ю.Е., Стародубцев Ю.И., Сухорукова Е.В., Панкова Н.В., опубликован 31.03.2014), сущность которого состоит в обнаружении несанкционированно установленных в контролируемой зоне радиоэлектронных устройств в условиях неопределенности параметров сигналов, взятый за прототип.
Сущность данного способа состоит в следующем.
Принимают электромагнитные сигналы (ЭМС) в предварительно заданном диапазоне частот в контролируемом помещении с помощью сканирующего радиоприемника, предварительно задав множество исходных данных, заносят в базу данных спектральные характеристики всех электромагнитных сигналов в заданном диапазоне частот, включают высокочастотный радиопередатчик, подключенный к узконаправленной передающей антенне, после чего считывают из базы данных спектральную характеристику ЭМС №1, определяют частоту его максимальной спектральной составляющей, одновременно с облучением тестовым сигналом контролируемого помещения принимают сканирующим радиоприемником ЭМС №1 на ненаправленную антенну, после чего запоминают азимутальный угол α1 узконаправленной передающей антенны. Затем повторяют те же действия с остальными спектральными характеристиками, причем если при полном обороте узконаправленной передающей антенны сдвиг частот сравниваемых спектральных составляющих в момент облучения не зафиксирован, то делают выводы о нахождении источника ЭМИ за пределами контролируемого помещения и исключают из базы данных, если зафиксирован, то высокочастотный радиопередатчик с узконаправленной передающей антенной и генератор тестовой последовательности любым способом перемещают на противоположную сторону относительно сканирующего радиоприемника. Далее повторяют те же действия, что и при первом расположении высокочастотного радиопередатчика, запоминают азимутальный угол α2 направленной передающей антенны, причем если при полном обороте передающей антенны сдвиг частот сравниваемых спектральных составляющих в момент облучения не зафиксирован, то делают вывод о нахождении источника ЭМИ за пределами контролируемого помещения и данные ЭМС исключают из базы данных, после чего вычисляют координаты ЭМС, для которых определены азимутальные углы α1 и α2, определяют принадлежность координат ЭМС множеству координат контролируемого помещения, в случае попадания в пределы контролируемого помещения делают вывод о местоположении несанкционированно установленных на объекте электронных устройств.
Недостатком прототипа является то, что способ позволяет обнаружить в пределах контролируемой зоны несанкционированно установленные электронные устройства, использующие только узкополосные сигналы.
Заявляемое техническое решение свободно от этого недостатка.
Техническим результатом заявленного изобретения является обнаружение несанкционированно установленных радиоэлектронных устройств, использующих широкополосные сигналы в предварительно заданном диапазоне частот, при отсутствии предварительных данных о параметрах широкополосных сигналов за счет анализа помеховой обстановки.
Технический результат достигается тем, что в известном способе обнаружения электромагнитных сигналов, заключающемся в том, что в качестве исходных данных задают диапазон частот, в котором могут работать несанкционированно установленные на объекте электронные устройства, шаг перестройки, полосу пропускания, размещают сканирующее радиоприемное устройство на территории контролируемого объекта, вводят значения диапазона частот в сканирующее радиоприемное устройство, включают сканирующее радиоприемное устройство, принимают электромагнитные сигналы и заносят в базу данных спектральные характеристики всех электромагнитных сигналов в заданной полосе частот, дополнительно в исходных данных задают точность ε и достоверность измерений α, общее время измерений Т, интервал времени Δt между последовательными измерениями n, необходимое для формирования сигнала о наличии источника широкополосного сигнала количество частот L в заданном диапазоне частот, сканирующее радиоприемное устройство со встроенным измерителем шума либо с дополнительным оборудованием с возможностью его измерения, перемещают сканирующее радиоприемное устройство в геометрический центр контролируемого объекта, рассчитывают необходимое количество измерений N для заданной точности и достоверности, рассчитывают количество частот К в заданном диапазоне частот, на которых осуществляют измерение уровня помех Аш, задают трехмерную прямоугольную матрицу данных М(К, N, T), состоящую из уровней m, где m соответствует числу измерений амплитуд помех Аш на К частотах через интервалы времени Δt, n - количество измерений амплитуд помех Аш на К частотах на m-м уровне матрицы, осуществляют прием и измерение амплитуд помех Аш на каждой частоте в соответствии с шагом Δƒ в заданном диапазоне частот, запоминают амплитуды помех в последовательные моменты времени в соответствии с числом измерений N в соответствующих ячейках матрицы, рассчитывают математическое ожидание М и среднеквадратическое отклонение G амплитуд помех на каждой частоте заданного диапазона частот, запоминают значения М и G, повторяют действия через интервал Δt по приему, измерению, записи в соответствующих ячейках матрицы значений Аш, расчету и запоминанию значений М и G, рассчитывают разности математических ожиданий амплитуд помех в последовательные моменты времени измерений n, рассчитывают среднеквадратическое отклонение  для каждой частоты из рассчитанного количества К, сравнивают полученные значения разности со средним среднеквадратическим отклонением для каждой частоты из рассчитанного количества К заданного диапазона частот, запоминают количество частот k, на которых значение разности превышает значение , сравнивают значения количества частот k с заданным количеством частот L, если k<L, то повторяют описанные выше действия по сбору данных о помеховой обстановке и их статической обработке, если k≥L, то формируют сигнал о наличии источника широкополосного сигнала на территории контролируемого объекта в текущий момент времени t=t+Δt.
для каждой частоты из рассчитанного количества К, сравнивают полученные значения разности со средним среднеквадратическим отклонением для каждой частоты из рассчитанного количества К заданного диапазона частот, запоминают количество частот k, на которых значение разности превышает значение , сравнивают значения количества частот k с заданным количеством частот L, если k<L, то повторяют описанные выше действия по сбору данных о помеховой обстановке и их статической обработке, если k≥L, то формируют сигнал о наличии источника широкополосного сигнала на территории контролируемого объекта в текущий момент времени t=t+Δt.
Во втором варианте технический результат достигается тем, что в известном способе обнаружения электромагнитных сигналов, заключающемся в том, что в качестве исходных данных задают диапазон частот, в котором могут работать несанкционированно установленные на объекте электронные устройства, шаг перестройки, полосу пропускания, размещают сканирующее радиоприемное устройство на территории контролируемого объекта, вводят значения диапазона частот в сканирующее радиоприемное устройство, включают сканирующее радиоприемное устройство, принимают электромагнитные сигналы и заносят в базу данных спектральные характеристики всех электромагнитных сигналов в заданной полосе частот, дополнительно в исходных данных задают точность ε и достоверность измерений α, общее время измерений Т, интервал времени Δt между последовательными измерениями n, необходимое для формирования сигнала о наличии источника широкополосного сигнала количество частот L в заданном диапазоне частот, сканирующее радиоприемное устройство со встроенным измерителем шума либо с дополнительным оборудованием с возможностью его измерения, перемещают сканирующее радиоприемное устройство в геометрический центр контролируемого объекта, рассчитывают необходимое количество измерений N для заданной точности и достоверности, рассчитывают количество частот К в заданном диапазоне частот, на которых осуществляют измерение уровня помех Аш, задают трехмерную прямоугольную матрицу данных М(К, N, Т), состоящую из уровней m, где m соответствует числу измерений амплитуд помех Аш на К частотах через интервалы времени Δt, n - количество измерений амплитуд помех Аш на К частотах на m-м уровне матрицы, осуществляют прием и измерение амплитуд помех Аш на каждой частоте в соответствии с шагом Δƒ в заданном диапазоне частот, запоминают амплитуды помех в последовательные моменты времени в соответствии с числом измерений N в соответствующих ячейках матрицы, рассчитывают математическое ожидание М и среднеквадратическое отклонение G амплитуд помех на каждой частоте заданного диапазона частот, запоминают значения М и G, повторяют действия через интервал Δƒ по приему, измерению, записи в соответствующих ячейках матрицы значений Аш, расчету и запоминанию значений М и G, рассчитывают разности математических ожиданий амплитуд помех в последовательные моменты времени измерений n, рассчитывают среднеквадратическое отклонение для каждой частоты из рассчитанного количества К, сравнивают полученные разности математических ожиданий уровней помех в последовательные моменты времени со средним значением среднеквадратического отклонения , взятым с противоположным знаком, для каждой частоты из рассчитанного количества К заданного диапазона частот, запоминают количество частот k, на которых значение разности меньше значения среднеквадратического отклонения , взятого с противоположным знаком  , сравнивают значения количества частот k с заданным количеством частот L, если k≥L, то формируют сигнал о наличии источника широкополосного сигнала на территории контролируемого объекта в момент времени t.
, сравнивают значения количества частот k с заданным количеством частот L, если k≥L, то формируют сигнал о наличии источника широкополосного сигнала на территории контролируемого объекта в момент времени t.
Заявленный способ поясняется чертежами, на которых показано:
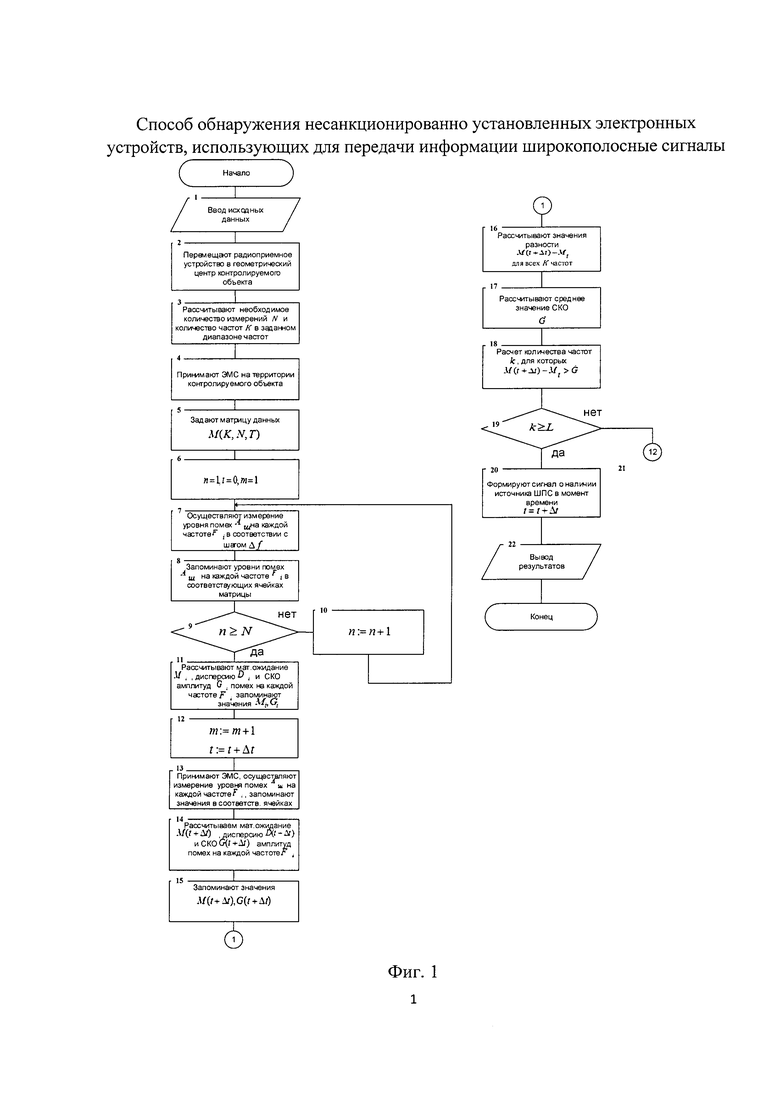
фиг. 1 - алгоритм предлагаемого способа обнаружения широкополосных сигналов в текущий момент времени t=t+Δt;
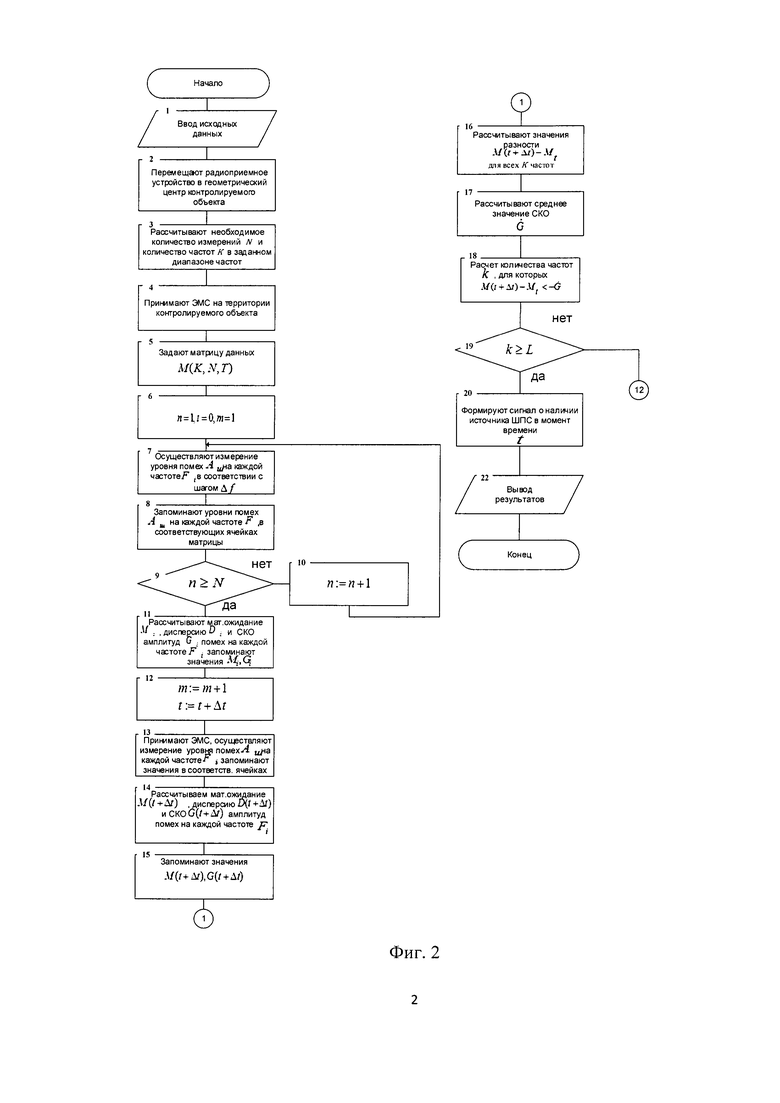
фиг. 2 - алгоритм способа обнаружения широкополосного сигнала в момент времени t;
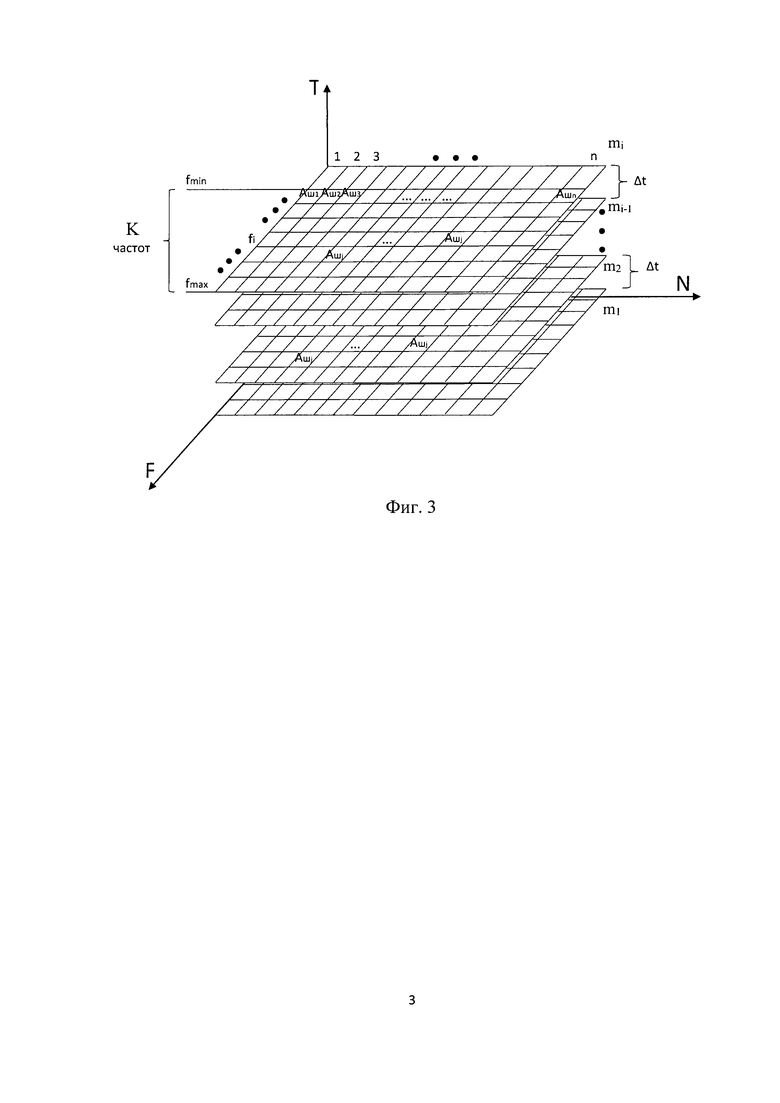
фиг. 3 - матрица данных М(К, N, T).
Заявленный по первому варианту способ позволяет обнаружить факт появления широкополосного сигнала в момент времени t=t+Δt и может быть реализован в виде алгоритма, представленного на фиг. 1:
1. Осуществляют ввод исходных данных (бл. 1, фиг. 1), а именно: задают диапазон частот, в котором могут работать несанкционированно установленные на объекте электронные устройства, и вводят эти данные в сканирующее радиоприемное устройство (далее сканирующий радиоприемник) со встроенным измерителем шума либо с дополнительным оборудованием с возможностью его измерения, задают точность ε и достоверность измерений α, общее время измерений Т, интервал времени Δt между последовательными измерениями n, шаг сетки заданного диапазона частот Δƒ, необходимое для формирования сигнала о наличии источника широкополосного сигнала количество частот L в заданном диапазоне частот.
2. Перемещают сканирующий радиоприемник в геометрический центр контролируемого объекта и подготавливают его к приему электромагнитных сигналов на территории контролируемого объекта. Сканирующий радиоприемник представляет собой радиотехническое устройство со встроенным измерителем шума либо с дополнительным оборудованием с возможностью его измерения (бл. 2, фиг. 1).
3. Рассчитывают необходимое количество измерений N и количество частот К в заданном диапазоне частот (бл. 3, фиг. 1).
Анализ формул расчета необходимого количества измерений [Боев В.Д., Кондрашов Ю.В. «Моделирование и проектирование систем»: Учебник. - СПб.: ВАС, 2016 г. - 268 с., стр. 163] показывает, что число реализаций в зависимости от вероятности Р изменяется от 0 (при Р=0) до 0 (при Р=1), проходя через максимум. Максимальное значение N принимает при вероятности Р=0,5 (расчет для «наихудшего» случая). Если вероятность значительно отличается от 0,5 (в любую сторону), то точность измерений будет выше заданной изначально. Исходя из этого рассчитывают необходимое количество измерений N по формуле 1 (бл. 3, фиг. 1) [Боев В.Д., Кондрашов Ю.В. «Моделирование и проектирование систем»: Учебник. - СПб.: ВАС, 2016 г. - 268 с., стр. 163]:

где ε - необходимая точность измерений, заданная в блоке 1;
 - аргумент функции Лапласа, значения которого находим из таблицы функции (интеграла) Лапласа в соответствии с заданной в блоке 1 достоверностью измерений α.
- аргумент функции Лапласа, значения которого находим из таблицы функции (интеграла) Лапласа в соответствии с заданной в блоке 1 достоверностью измерений α.
По формуле 3 [Игнатов В.В., Калимник Ю.П., Никольский И.Н., Пивоваров В.Ф., Прохоров В.К., Репин Г.А., Скрипник Н.П., Шаров А.Н. «Военные системы радиосвязи». - Л.: ВАС, 1989 г. - 386 с., стр. 128] рассчитывают количество частот К в заданном диапазоне частот, на которых осуществляют измерение амплитуд помех Аш (бл. 3, фиг. 1):

где ƒmin - минимальная частота диапазона частот;
ƒmax - максимальная частота диапазона частот;
Δƒ - шаг сетки диапазона частот.
4. На территории контролируемого объекта с помощью сканирующего радиоприемника принимают электромагнитный сигнал в заданном диапазоне частот [ƒmin;ƒmax] (бл. 4, фиг. 1).
5. Задают трехмерную прямоугольную матрицу данных M(K, N, T) (бл. 5, фиг. 1), состоящую из m уровней (фиг. 3), где m соответствует числу измерений амплитуд помех Аш на К частотах через интервалы времени Δt, n - количество измерений амплитуд помех Аш на К частотах на m-м уровне матрицы (бл. 5, фиг. 1).
6. Устанавливают первоначальные значения счетчиков времени t и счетчика количества измерений m и n: n=1, t=0, m=1 (бл. 6, фиг. 1). Запускают цикл измерений амплитуд помех на К частотах заданного диапазона частот.
7. Осуществляют измерение амплитуд помех Аш на К частотах заданного диапазона частот (бл. 7, фиг. 1).
8. Запоминают значения амплитуд помех Аш в соответствующих ячейках матрицы М(К, N, T) (бл. 8, фиг. 3).
9. Сравнивают значение количества проведенных измерений n с рассчитанным значением N (бл. 9, фиг. 1).
10. Если n<N, значение количества измерений в соответствующем счетчике увеличивают на «1» (бл. 10, фиг. 1) и повторяют действия, начиная с блока 7. При n≥N переходят к действиям, описанным в блоке 11.
11. Рассчитывают математическое ожидание Mi, дисперсию Di и СКО амплитуд Gi помех на каждой частоте Fi, запоминают значения Mi, Gi.
Так как при большом числе слагаемых среднее арифметическое наблюдаемых значений случайной величины приближается (сходится по вероятности) к ее математическому ожиданию [Вентцель Е.С. «Теория вероятностей»: Учебник для студ. вузов. - 10-е изд., стер. - М.: Издательский центр «Академия», 2005 г. - 576 с., стр. 81], то в качестве оценки математического ожидания амплитуд помех на всех К частотах в момент времени t возьмем среднее арифметическое значение амплитуд помех на этих частотах [Боев В.Д., Кондрашов Ю.В. «Моделирование и проектирование систем»: Учебник. - СПб.: ВАС, 2016 г. - 268 с., стр. 154], (бл. 11, фиг. 1):

где Aшj - амплитуда помехи на ƒi частоте (ƒi∈[ƒmin; ƒmax]) при j-м измерении (j∈[1; n]).
Затем по формулам 5, 6 рассчитывают дисперсию Dt, среднеквадратическое отклонение Gt амплитуд помех соответственно на всех К частотах заданного диапазона частот (бл. 11, фиг. 1) [Вентцель Е.С. «Теория вероятностей»: Учебник для студ. вузов. - 10-е изд., стер. - М.: Издательский центр «Академия», 2005 г. - 576 с., стр. 90]:

Mti - математическое ожидание амплитуды помехи на ƒi частоте в момент времени t;
Pti - вероятность свершения соответствующего события.

где Dti - дисперсия амплитуды помехи на ƒi частоте в момент времени t, рассчитанная по формуле 4.
12. Увеличивают значения счетчиков m=m+1, t=t+Δt (бл. 12, фиг. 1).
13. Через интервал времени Δt (в момент времени t+Δt) осуществляют прием, измерение, запись в соответствующих ячейках матрицы значений амплитуд помех Аш.
14. В момент времени t+Δt рассчитывают математическое ожидание M(t+Δt), дисперсию D(t+Δt), среднеквадратическое отклонение G(t+Δt) амплитуд помех соответственно на всех К частотах заданного диапазона частот по формулам 4, 5, 6 соответственно (бл. 14, фиг. 1).
15. Запоминают значения M(t+Δt), G(t+Δt) на всех К частотах (бл. 15, фиг. 1).
16. Рассчитывают значения разности M(t+Δt) - Mt на К частотах заданного диапазона (бл. 16, фиг. 1).
17. Рассчитывают среднее значение среднеквадратического отклонения амплитуд помех на всех К частотах (бл. 17, фиг. 1)по формуле 7:

где Gt - среднеквадратическое отклонение амплитуд помех в момент времени t;
G(t+Δt) - среднеквадратическое отклонение амплитуд помех в момент времени t+Δt.
18. Рассчитывают количество частот k, для которых справедливо неравенство  (бл. 18, фиг. 1).
(бл. 18, фиг. 1).
19. Сравнивают значение рассчитанного (бл. 19, фиг. 1) количества частот k с заданным (бл. 1, фиг. 1) количеством частот L, причем при k<L повторяют действия, начиная с блока 12, при k≥L формируют сигнал о наличии источника широкополосного сигнала в момент времени t+Δt (бл. 20, фиг. 1).
Заявленный по второму варианту способ позволяет обнаружить факт существования широкополосного сигнала с момента времени t и может быть реализован в виде алгоритма, представленного на фиг. 2.
В этих целях осуществляют аналогичные первому варианту предлагаемого способа действия в бл. 1-17 (фиг. 1, фиг. 2). Далее рассчитывают количество частот k, для которых справедливо неравенство  (бл. 18, фиг. 2).
(бл. 18, фиг. 2).
Сравнивают значение рассчитанного (бл. 19, фиг. 2) количества частот k с заданным (в бл. 1, фиг. 2) количеством частот L, причем при k<L повторяют действия, начиная с блока 12.
При k≥L формируют сигнал о наличии источника широкополосного сигнала в момент времени t (бл. 20, фиг. 2).
Таким образом, даже при неизвестных параметрах сигнала при реализации данного способа будут обнаружены несанкционированно установленные радиоэлектронные устройства, использующие широкополосные сигналы в предварительно заданном диапазоне частот, и моменты времени их работы за счет анализа помеховой обстановки, что обеспечивает достижение технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения несанкционированно установленных электронных устройств с обучением | 2017 |
|
RU2653576C1 |
| Способ аутентификации корреспондентов радиосети | 2017 |
|
RU2653316C1 |
| Способ контроля многопараметрического объекта | 2021 |
|
RU2764389C1 |
| Способ внешнего контроля качества предоставляемых сетью связи услуг | 2017 |
|
RU2669535C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2005 |
|
RU2309547C2 |
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| ПРИЕМНИК ПРОСТОГО ИМПУЛЬСНОГО СИГНАЛА | 2011 |
|
RU2474842C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МНОЖЕСТВА УЗКОПОЛОСНЫХ РАДИОСИГНАЛОВ В ШИРОКОЙ ПОЛОСЕ ЧАСТОТ | 2010 |
|
RU2429494C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| Способ обнаружения несанкционированно установленных радиоэлектронных средств на абонентских линиях связи | 2016 |
|
RU2621455C1 |
Изобретение относится к средствам радиомониторинга электронного оборудования, а именно к обнаружению несанкционированно установленных радиоэлектронных устройств, использующих широкополосные сигналы. Технический результат – обеспечение обнаружения несанкционированно установленных радиоэлектронных устройств, использующих широкополосные сигналы в предварительно заданном диапазоне частот, при отсутствии предварительных данных о параметрах широкополосных сигналов. Способ обнаружения несанкционированно установленных устройств, использующих для передачи информации широкополосные сигналы, заключается в том, что предварительно задают диапазон частот, в котором могут работать несанкционированно установленные на объекте электронные устройства, а также исходные данные, необходимые для измерений. Для сбора данных о помеховой обстановке задают матрицу данных, в ячейках которой запоминают измеренные в последовательные моменты времени уровни помех, сравнивают разности рассчитанных математических ожиданий со средним среднеквадратическим отклонением для каждой частоты, подсчитывают количество частот, на которых разность математических ожиданий превышает среднее среднеквадратическое отклонение, сравнивают количество частот с заданным, в соответствии с этим формируют сигнал о наличии либо отсутствии источника широкополосного сигнала на территории контролируемого объекта. 1 з.п. ф-лы, 3 ил.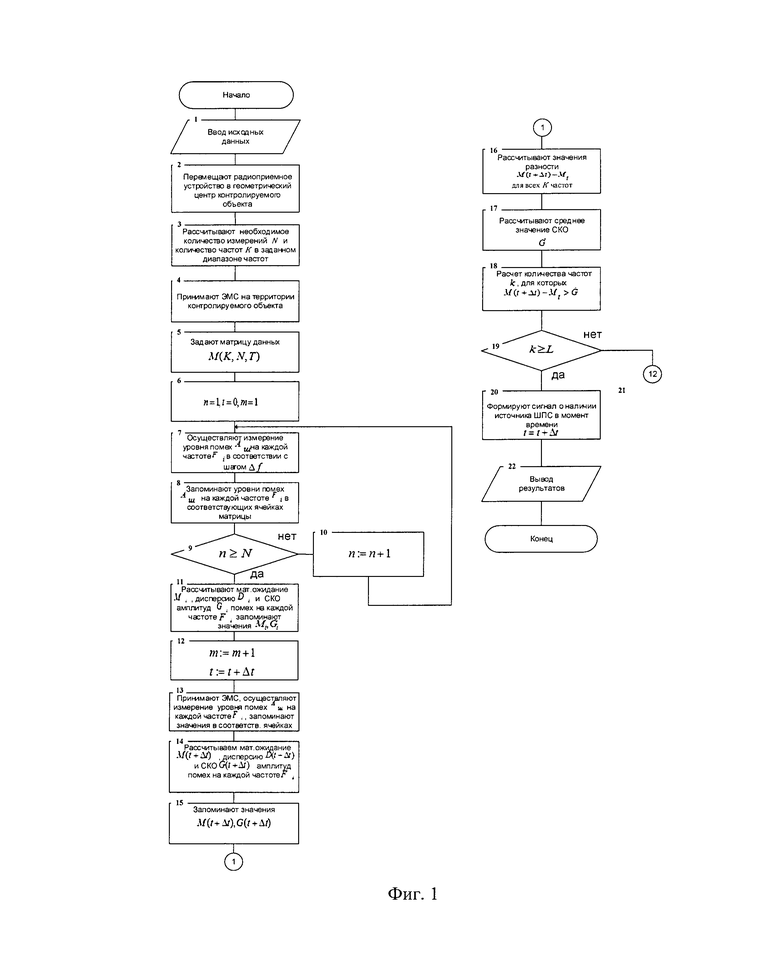
1. Способ обнаружения несанкционированно установленных электронных устройств, использующих для передачи информации широкополосные сигналы, заключающийся в том, что формируют множество исходных данных: диапазон частот, в котором могут работать несанкционированно установленные на объекте электронные устройства, включают радиоприемное устройство, вводят значения диапазона частот в радиоприемное устройство, размещают радиоприемное устройство на территории контролируемого объекта, отличающийся тем, что дополнительно в исходных данных задают точность и достоверность измерений, общее время измерений Т, интервал времени Δt между последовательными измерениями n, шаг сетки заданного диапазона частот  , необходимое для принятия решения о наличии источника широкополосного сигнала количество частот L в заданном диапазоне частот, перемещают радиоприемное устройство в геометрический центр контролируемого объекта, причем радиоприемное устройство со встроенным измерителем шума либо с дополнительным оборудованием с возможностью его измерения, рассчитывают необходимое количество измерений N для заданной точности и достоверности, рассчитывают количество частот K в заданном диапазоне частот, на которых осуществляют измерение уровня помех Аш, задают трехмерную прямоугольную матрицу данных М(K, N, T), состоящую из уровней n, где n соответствует числу измерений, для чего осуществляют прием и измерение уровня помех Аш на каждой частоте в соответствии с шагом
, необходимое для принятия решения о наличии источника широкополосного сигнала количество частот L в заданном диапазоне частот, перемещают радиоприемное устройство в геометрический центр контролируемого объекта, причем радиоприемное устройство со встроенным измерителем шума либо с дополнительным оборудованием с возможностью его измерения, рассчитывают необходимое количество измерений N для заданной точности и достоверности, рассчитывают количество частот K в заданном диапазоне частот, на которых осуществляют измерение уровня помех Аш, задают трехмерную прямоугольную матрицу данных М(K, N, T), состоящую из уровней n, где n соответствует числу измерений, для чего осуществляют прием и измерение уровня помех Аш на каждой частоте в соответствии с шагом  в заданном диапазоне частот, запоминают уровни помех в последовательные моменты времени в соответствии с числом измерений N в соответствующих ячейках матрицы, рассчитывают математическое ожидание М и среднеквадратическое отклонение G амплитуд помех на каждой частоте заданного диапазона частот, запоминают значения М и G, повторяют действия через интервал Δt по приему, измерению, записи в соответствующих ячейках матрицы значений Аш, расчету и запоминанию значений М и G, рассчитывают разности математических ожиданий уровней помех в последовательные моменты времени измерений n, рассчитывают среднеквадратическое отклонение
в заданном диапазоне частот, запоминают уровни помех в последовательные моменты времени в соответствии с числом измерений N в соответствующих ячейках матрицы, рассчитывают математическое ожидание М и среднеквадратическое отклонение G амплитуд помех на каждой частоте заданного диапазона частот, запоминают значения М и G, повторяют действия через интервал Δt по приему, измерению, записи в соответствующих ячейках матрицы значений Аш, расчету и запоминанию значений М и G, рассчитывают разности математических ожиданий уровней помех в последовательные моменты времени измерений n, рассчитывают среднеквадратическое отклонение  для каждой частоты из рассчитанного количества K, сравнивают полученные значения разности со средним среднеквадратическим отклонением для каждой частоты из рассчитанного количества K заданного диапазона частот, запоминают количество частот k, на которых значение разности превышает значение
для каждой частоты из рассчитанного количества K, сравнивают полученные значения разности со средним среднеквадратическим отклонением для каждой частоты из рассчитанного количества K заданного диапазона частот, запоминают количество частот k, на которых значение разности превышает значение  , сравнивают значения количества частот k с заданным количеством частот L, если k<L, то повторяют описанные выше действия по сбору данных о помеховой обстановке и их статической обработке, если k≥L, то формируют сигнал о наличии источника широкополосного сигнала на территории контролируемого объекта в момент времени t=t+Δt.
, сравнивают значения количества частот k с заданным количеством частот L, если k<L, то повторяют описанные выше действия по сбору данных о помеховой обстановке и их статической обработке, если k≥L, то формируют сигнал о наличии источника широкополосного сигнала на территории контролируемого объекта в момент времени t=t+Δt.
2. Способ обнаружения несанкционированно установленных электронных устройств, использующих для передачи информации широкополосные сигналы, по п. 1, отличающийся тем, что сравнивают полученные разности математических ожиданий уровней помех в последовательные моменты времени со средним значением среднеквадратического отклонения  , взятым с противоположным знаком, для каждой частоты из рассчитанного количества K заданного диапазона частот, запоминают количество частот k, на которых значение разности меньше значения среднеквадратического отклонения
, взятым с противоположным знаком, для каждой частоты из рассчитанного количества K заданного диапазона частот, запоминают количество частот k, на которых значение разности меньше значения среднеквадратического отклонения  , взятого с противоположным знаком
, взятого с противоположным знаком  , сравнивают значения количества частот k с заданным количеством частот L, если k<L, то повторяют описанные выше действия по сбору данных о помеховой обстановке и их статической обработке, если k≥L, то формируют сигнал о наличии источника широкополосного сигнала на территории контролируемого объекта в момент времени t.
, сравнивают значения количества частот k с заданным количеством частот L, если k<L, то повторяют описанные выше действия по сбору данных о помеховой обстановке и их статической обработке, если k≥L, то формируют сигнал о наличии источника широкополосного сигнала на территории контролируемого объекта в момент времени t.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕСАНКЦИОНИРОВАННО УСТАНОВЛЕННЫХ НА ОБЪЕКТЕ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2014 |
|
RU2558333C1 |
| RU 2012131727 A, 27.01.2014 | |||
| US 6925108 B1, 02.08.2005 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

