Изобретение относится к способу и системе для оценки потенциального трения между шиной транспортного средства и поверхностью качения.
Системы для оценки потенциального трения известны в данной области техники (см., например, публикации US 2011/0166761, US 2012/0179327, US 2011/0264300, ЕР 0444772, ЕР 1510428 и US 6094614.
В представленном описании и формуле изобретения подразумевается, что «потенциальное трение» означает ординату точки абсолютного максимума на кривой «трение контактного взаимодействия/кинематическая величина». Кинематическая величина может представлять собой (продольное) проскальзывание или угол увода. В первом случае трение контактного взаимодействия определяется как отношение между продольной силой Fx, обменной в плоскости контакта между шиной и поверхностью качения, и вертикальной нагрузкой Fz, действующей на шину. Во втором случае трение контактного взаимодействия определяется как отношение между боковой/поперечной силой Fy, обменной в плоскости контакта между шиной и поверхностью качения, и вертикальной нагрузкой Fz, действующей на шину.
В представленном описании и формуле изобретения подразумевается, что «кривая «трение контактного взаимодействия/кинематическая величина» означает кривую с заданной полосой неопределенности, например, для учета дисперсии экспериментальных данных по трению контактного взаимодействия и кинематической величине.
В представленном описании и формуле изобретения подразумевается, что переходный режим качения означает режим по существу прямолинейного качения при ускорении или торможении; режим движения на повороте с постоянной скоростью или режим движения на повороте при ускорении или торможении, предпочтительно не экстремальный.
В представленном описании подразумевается, что режим «свободного качения» означает режим качения по существу на месте по существу при отсутствии продольных и/или поперечных сил, приложенных к шине.
В представленном описании и формуле изобретения:
- термины «боковой/поперечный» и «в боковом/поперечном направлении» используются для обозначения величин, измеряемых в направлении, по существу параллельном оси вращения шины;
- термины «радиальный» и «в радиальном направлении» используются для обозначения величин, измеряемых в направлении, по существу перпендикулярном к оси вращения шины, то есть в направлении, которое пересекает ось вращения шины и находится в плоскости, перпендикулярной к подобной оси вращения;
- термины «продольный» и «в продольном направлении» используются для обозначения величин, измеряемых тангенциально к шине и в направлении, по существу перпендикулярном к поперечному направлению и к радиальному направлению (то есть в направлении движения шины/транспортного средства вперед).
При изменении состояния системы «шина - поверхность качения», другими словами, условий эксплуатации шины (например, вертикальной нагрузки, действующей на шину, внутреннего давления в шине, скорости, износа, температуры и т.д.), характеристик самой шины (конструкции, композиции протектора и т.д.) и/или характеристик и состояния поверхности качения (наличия скользких элементов, подобных снегу, льду, листьям, шероховатости и т.д.), взаимосвязь между трением контактного взаимодействия и кинематической величиной описывается другой кривой, и, соответственно, существует другое потенциальное трение.
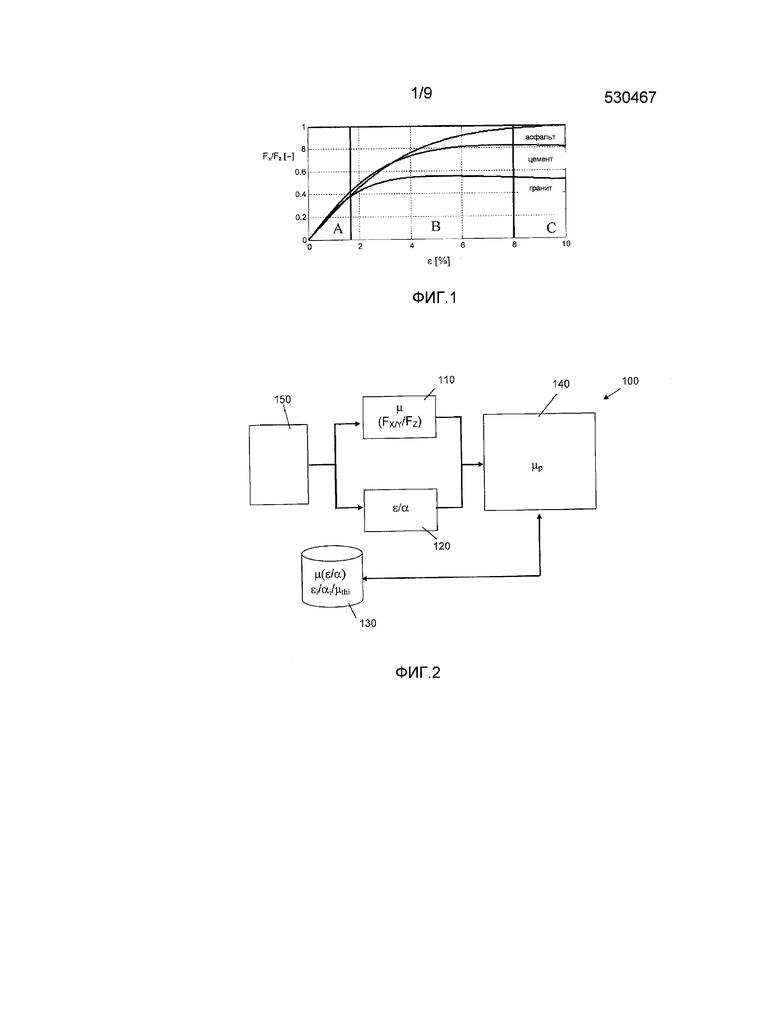
Фиг.1 показывает три примера кривых «трение контактного взаимодействия (Fx/Fz) - проскальзывание (ε)» для трех разных состояний системы «шина - поверхность качения (гранит, цемент и асфальт)».
На практике потенциальное трение определяет предельное состояние, за пределами которого условия сцепления шины начинают ухудшаться, вплоть до асимптотического состояния, при котором по мере увеличения скольжения трение контактного взаимодействия остается по существу постоянным и меньшим, чем максимальное трение (то есть само потенциальное трение).
На каждой кривой «трение контактного взаимодействия/кинематическая величина» можно по существу идентифицировать три зоны: линейную, нелинейную и асимптотическую (см. соответственно зоны А, В, С на фиг.1).
Линейная зона представляет по существу состояние «свободного качения» или «установившееся состояние», при котором трение контактного взаимодействия увеличивается по существу линейно по мере увеличения кинематической величины. В данной зоне кривые «трение контактного взаимодействия/кинематическая величина», относящиеся к разным состояниям системы «шина - поверхность качения», имеют тенденцию «концентрироваться» ближе к началу, практически перекрывая друг друга, так, что они будут не отличимыми друг от друга вследствие неизбежной неопределенности характеристик измерений, из которых получают данные по проскальзыванию и трению контактного взаимодействия.
Асимптотическая зона представляет вышеупомянутое асимптотическое состояние, при котором по мере увеличения кинематической величины трение контактного взаимодействия остается по существу постоянным.
Нелинейная зона представляет по существу переходное состояние качения, при котором трение контактного взаимодействия увеличивается по существу нелинейно при увеличении кинематической величины. В этой зоне кривые «трение контактного взаимодействия/кинематическая величина» отделяются друг от друга.
Заявитель установил в результате наблюдений, что отсутствует корреляция между наклоном линейной зоны и потенциальным трением. Другими словами, может случиться так, что кривая с бóльшим углом наклона в линейной зоне при этом будет иметь меньшее потенциальное трение относительно другой кривой с меньшим углом наклона. Однако Заявитель установил в результате наблюдений, что, несмотря на это, кривые с меньшим потенциальным трением переходят от линейной к нелинейной зоне перед кривыми с бóльшим потенциальным трением. Другими словами, кривые с меньшим потенциальным трением «отделяются» и становятся различимыми раньше, чем другие кривые, следовательно, они имеют относительно короткую линейную зону.
На основе данного наблюдения Заявитель установил, что путем выбора пороговых значений кинематической величины и/или пороговых величин трения контактного взаимодействия в точках, в которых базовые кривые «трение контактного взаимодействия/кинематическая величина» становятся по существу отличимыми от соответствующих базовых кривых при большем потенциальном трении, и путем сравнения рабочих точек «трение контактного взаимодействия/кинематическая величина» с подобными пороговыми значениями/величинами и подобными базовыми кривыми можно получить информацию о потенциальном трении, как только базовая кривая при меньшем потенциальном трении становится отличимой от остальных базовых кривых, и затем еще более точную информацию, когда остальные базовые кривые также становятся отличимыми от соответствующих базовых кривых при большем потенциальном трении по мере увеличения текущих значений трения контактного взаимодействия и/или кинематической величины.
Следовательно, в соответствии с его первым аспектом настоящее изобретение относится к способу оценки потенциального трения μр между шиной и поверхностью качения.
Способ оценки может «оперировать» пороговыми значениями кинематической величины и/или пороговыми величинами трения контактного взаимодействия.
В случае использования пороговых значений кинематических величин способ оценки включает:
- построение первой и второй базовых кривых «трение контактного взаимодействия/кинематическая величина», соответственно соответствующих первой и второй опорным величинам μр1, μр2 потенциального трения, при этом μр2>μр1;
- предусмотрение первого и второго пороговых значений кинематической величины, при этом указанное первое пороговое значение соответствует значению кинематической величины, при котором указанная первая базовая кривая по существу отличима от указанной второй базовой кривой, и указанное второе пороговое значение соответствует значению кинематической величины, при котором указанная вторая базовая кривая по существу отличима от, по меньшей мере, одной третьей базовой кривой, которая соответствует третьей опорной величине μр3 потенциального трения, при этом μр3>μр2;
- определение трения μ контактного взаимодействия между шиной и поверхностью качения;
- определение текущего значения кинематической величины между шиной и поверхностью качения;
- определение текущей рабочей точки, задаваемой трением μ контактного взаимодействия и текущим значением кинематической величины;
- сравнение текущего значения кинематической величины с первым и вторым пороговыми значениями кинематической величины;
- если текущее значение кинематической величины находится в диапазоне между первым и вторым пороговыми значениями кинематической величины и указанная рабочая точка находится выше указанной первой базовой кривой, определение того, что величина потенциального трения превышает указанную первую опорную величину μр1;
- если текущее значение кинематической величины превышает второе пороговое значение кинематической величины и указанная рабочая точка находится выше указанной второй базовой кривой, определение того, что величина потенциального трения превышает указанную вторую опорную величину μр2 потенциального трения;
- если текущее значение кинематической величины превышает второе пороговое значение кинематической величины и указанная рабочая точка находится между указанной первой и указанной второй базовыми кривыми, определение того, что величина потенциального трения находится в диапазоне между указанной первой опорной величиной μр1 потенциального трения и указанной второй опорной величиной μр2 потенциального трения;
- если текущая кинематическая величина превышает первое пороговое значение кинематической величины и указанная рабочая точка не находится выше указанной первой базовой кривой, определение того, что величина потенциального трения равна указанной первой опорной величине μр1 или меньше указанной первой опорной величины μр1.
В случае использования пороговых величин трения контактного взаимодействия способ оценки включает:
- построение первой и второй базовых кривых «трение контактного взаимодействия/кинематическая величина», соответственно соответствующих первой и второй опорным величинам μр1, μр2 потенциального трения, при этом μр2>μр1;
- предусмотрение первой и второй пороговых величин трения контактного взаимодействия, при этом указанная первая пороговая величина соответствует величине трения контактного взаимодействия, при которой указанная первая базовая кривая по существу отличима от указанной второй базовой кривой, и указанная вторая пороговая величина соответствует величине трения контактного взаимодействия, при которой указанная вторая базовая кривая по существу отличима от, по меньшей мере, одной третьей базовой кривой, которая соответствует третьей опорной величине μр3 потенциального трения, при этом μр3>μр2;
- определение трения μ контактного взаимодействия между шиной и поверхностью качения;
- определение текущего значения кинематической величины между шиной и поверхностью качения;
- определение текущей рабочей точки, задаваемой трением μ контактного взаимодействия и текущим значением кинематической величины;
- сравнение трения μ контактного взаимодействия с первой и второй пороговыми величинами трения контактного взаимодействия;
- если трение μ контактного взаимодействия находится в диапазоне между первой и второй пороговыми величинами трения контактного взаимодействия и указанная рабочая точка находится выше указанной первой базовой кривой, определение того, что величина потенциального трения превышает указанную первую опорную величину μр1;
- если трение μ контактного взаимодействия превышает вторую пороговую величину трения контактного взаимодействия и указанная рабочая точка находится выше указанной второй базовой кривой, определение того, что величина потенциального трения превышает указанную вторую опорную величину μр2 потенциального трения;
- если трение μ контактного взаимодействия превышает вторую пороговую величину трения контактного взаимодействия и указанная рабочая точка находится между указанной первой и указанной второй базовыми кривыми, определение того, что величина потенциального трения находится в диапазоне между указанной первой опорной величиной μр1 потенциального трения и указанной второй опорной величиной μр2 потенциального трения;
- если трение μ контактного взаимодействия превышает первую пороговую величину трения контактного взаимодействия и указанная рабочая точка не находится выше указанной первой базовой кривой, определение того, что величина потенциального трения равна указанной первой опорной величине μр1 или меньше указанной первой опорной величины μр1.
В соответствии с его вторым аспектом настоящее изобретение относится к системе для оценки потенциального трения между шиной и поверхностью качения, содержащей:
память, в которой хранятся первая и вторая базовые кривые «трение контактного взаимодействия/кинематическая величина», соответственно соответствующие первой и второй опорным величинам μр1, μр2 потенциального трения, при этом μр2>μр1, и первое и второе пороговые значения кинематической величины или первая и вторая пороговые величины трения контактного взаимодействия, при этом указанное первое пороговое значение/указанная первая пороговая величина соответствует значению кинематической величины или, соответственно, величине трения контактного взаимодействия, при котором/которой указанная первая базовая кривая по существу отличима от указанной второй базовой кривой, и указанное второе пороговое значение/указанная вторая пороговая величина соответствует значению кинематической величины или, соответственно, величине трения контактного взаимодействия, при котором/которой указанная вторая базовая кривая по существу отличима от, по меньшей мере, одной третьей базовой кривой, которая соответствует третьей опорной величине μр3 потенциального трения, при этом μр3>μр2;
по меньшей мере, один модуль обработки, выполненный с возможностью:
- определения трения μ контактного взаимодействия между шиной и поверхностью качения;
- определения текущего значения кинематической величины между шиной и поверхностью качения;
- определения текущей рабочей точки, задаваемой трением μ контактного взаимодействия и текущим значением кинематической величины;
- сравнения текущего значения кинематической величины с первым и вторым пороговыми значениями кинематической величины или, соответственно, трения μ контактного взаимодействия с первой и второй пороговыми величинами трения контактного взаимодействия;
- если текущее значение кинематической величины или трение μ контактного взаимодействия находится в диапазоне между соответствующими первым и вторым пороговыми значениями/первой и второй пороговыми величинами и указанная рабочая точка находится выше указанной первой базовой кривой, определения того, что величина потенциального трения превышает указанную первую опорную величину μр1;
- если текущее значение кинематической величины или трение μ контактного взаимодействия превышает соответственно второе пороговое значение/вторую пороговую величину и указанная рабочая точка находится выше указанной второй базовой кривой, определения того, что величина потенциального трения превышает указанную вторую опорную величину μр2 потенциального трения;
- если текущее значение кинематической величины или трение μ контактного взаимодействия превышает соответственно второе пороговое значение/вторую пороговую величину и указанная рабочая точка находится между указанной первой и указанной второй базовыми кривыми, определения того, что величина потенциального трения находится в диапазоне между указанной первой опорной величиной μр1 потенциального трения и указанной второй опорной величиной μр2 потенциального трения;
- если текущая кинематическая величина или трение μ контактного взаимодействия превышает соответственно первое пороговое значение/первую пороговую величину и указанная рабочая точка не находится выше указанной первой базовой кривой, определения того, что величина потенциального трения равна указанной первой опорной величине μр1 или меньше указанной первой опорной величины μр1.
Настоящее изобретение, по меньшей мере, в одном из вышеупомянутых аспектов может иметь, по меньшей мере, один из нижеприведенных предпочтительных отличительных признаков.
Первую базовую кривую «трение контактного взаимодействия/кинематическая величина» предпочтительно выбирают так, чтобы она соответствовала опорной величине μр1 потенциального трения, меньшей или равной 0,3.
Первую базовую кривую «трение контактного взаимодействия/кинематическая величина» предпочтительно выбирают так, чтобы она соответствовала опорной величине μр1 потенциального трения, равной, по меньшей мере, 0,15.
Вторую базовую кривую «трение контактного взаимодействия/кинематическая величина» предпочтительно выбирают так, чтобы она соответствовала опорной величине μр2 потенциального трения, находящейся в диапазоне между 0,35 и 0,5.
Указанную, по меньшей мере, одну третью базовую кривую «трение контактного взаимодействия/кинематическая величина» предпочтительно выбирают так, чтобы она соответствовала опорной величине μр3 потенциального трения, равной, по меньшей мере, 0,55.
Предпочтительно, если первая пороговая величина трения контактного взаимодействия меньше первой опорной величины μр1 потенциального трения.
Первую базовую кривую предпочтительно выбирают так, чтобы первая пороговая величина трения контактного взаимодействия находилась в диапазоне между 0,05 и 0,2.
Предпочтительно, если вторая пороговая величина трения контактного взаимодействия больше первой опорной величины μр1 потенциального трения и меньше второй опорной величины μр2 потенциального трения.
Вторую базовую кривую предпочтительно выбирают так, чтобы вторая пороговая величина трения контактного взаимодействия находилась в диапазоне между 0,25 и 0,4.
В предпочтительном варианте осуществления предусматривают как первое и второе пороговые значения кинематической величины, так и первую и вторую пороговые величины трения контактного взаимодействия, и, если текущее значение кинематической величины меньше первого порогового значения кинематической величины, то:
- если трение μ контактного взаимодействия находится в диапазоне между указанной первой и указанной второй пороговыми величинами трения контактного взаимодействия, определяют то, что величина потенциального трения превышает указанную первую опорную величину μр1 потенциального трения;
- если трение μ контактного взаимодействия превышает указанную вторую пороговую величину трения контактного взаимодействия, определение того, что величина потенциального трения превышает указанную вторую опорную величину μр2 потенциального трения.
В данном предпочтительном варианте осуществления в том случае, если текущее значение кинематической величины находится в диапазоне между первым и вторым пороговыми значениями кинематической величины и если трение μ контактного взаимодействия превышает указанную вторую пороговую величину трения контактного взаимодействия, предпочтительно определяют, что величина потенциального трения превышает указанную вторую опорную величину μр2 потенциального трения.
В предпочтительном варианте осуществления предусматривают как первое и второе пороговые значения кинематической величины, так и первую и вторую пороговые величины трения контактного взаимодействия, и, если трение контактного взаимодействия меньше первой пороговой величины трения контактного взаимодействия, то:
- если текущее значение кинематической величины превышает первое пороговое значение кинематической величины, определяют, что величина потенциального трения равна указанной первой опорной величине μр1 или меньше указанной первой опорной величины μр1.
В данном предпочтительном варианте осуществления в том случае, если трение контактного взаимодействия находится в диапазоне между первой и второй пороговыми величинами трения контактного взаимодействия и если текущее значение кинематической величины превышает второе пороговое значение кинематической величины и рабочая точка находится выше указанной первой базовой кривой, предпочтительно определяют, что величина потенциального трения находится в диапазоне между указанной первой опорной величиной μр1 и указанной второй опорной величиной μр2 потенциального трения.
В предпочтительном варианте осуществления предусматривают как первое и второе пороговые значения кинематической величины, так и первую и вторую пороговые величины трения контактного взаимодействия, и, если трение контактного взаимодействия меньше первой пороговой величины трения контактного взаимодействия и если текущее значение кинематической величины меньше первого порогового значения кинематической величины, предпочтительно определяют, что оценка потенциального трения не применима.
В предпочтительном варианте осуществления указанная кинематическая величина представляет собой угол α увода шины и указанное трение μ контактного взаимодействия представляет собой трение Fy/Fz контактного взаимодействия в боковом направлении. В данном предпочтительном варианте осуществления первую базовую кривую предпочтительно выбирают так, чтобы первое пороговое значение кинематической величины соответствовало углу увода, находящемуся в диапазоне между 0,5° и 1,2°. Вторую базовую кривую предпочтительно выбирают так, чтобы второе пороговое значение кинематической величины соответствовало углу увода, находящемуся в диапазоне между 1,2° и 2,5°.
В предпочтительном варианте осуществления указанная кинематическая величина представляет собой продольное проскальзывание ε шины и указанное трение μ контактного взаимодействия представляет собой трение Fx/Fz контактного взаимодействия в продольном направлении. В данном предпочтительном варианте осуществления первую базовую кривую предпочтительно выбирают так, чтобы первое пороговое значение кинематической величины соответствовало проскальзыванию, равному, по меньшей мере, 0,5%. Более предпочтительно, если первую базовую кривую выбирают так, чтобы первое пороговое значение кинематической величины соответствовало проскальзыванию, находящемуся в диапазоне между 0,5 и 0,9%. Вторую базовую кривую предпочтительно выбирают так, чтобы второе пороговое значение кинематической величины соответствовало проскальзыванию, равному, по меньшей мере, 0,9%. Более предпочтительно, если вторую базовую кривую выбирают так, чтобы второе пороговое значение кинематической величины соответствовало проскальзыванию, находящемуся в диапазоне между 0,9 и 1,5%.
В предпочтительном варианте осуществления рабочую точку определяют исходя из величин трения Fy/Fz контактного взаимодействия в боковом направлении и угла α увода, когда текущая боковая составляющая ускорения шины больше по абсолютной величине, чем заданное значение боковой составляющей ускорения, и/или рабочую точку определяют исходя из величин трения Fx/Fz контактного взаимодействия в продольном направлении и продольного проскальзывания ε шины, когда текущая боковая составляющая ускорения шины меньше по абсолютной величине, чем заданное значение боковой составляющей ускорения, и продольная составляющая ускорения шины больше по абсолютной величине, чем заданное значение продольной составляющей ускорения.
Предпочтительно обеспечивают вращение шины на поверхности качения при переходном режиме качения.
В системе управления транспортным средством, в которой используются система и/или способ по изобретению, базовые кривые «трение контактного взаимодействия/кинематическая величина» выбраны в соответствии с шиной или шинами модели/размера с техническими условиями, пригодными для рассматриваемого транспортного средства.
Система предпочтительно содержит модуль мониторинга, размещенный на транспортном средстве и/или на шине. Модуль мониторинга предпочтительно выполнен с конфигурацией, обеспечивающей возможность определения и обработки физических величин, коррелированных с продольными и/или боковыми силами, обменными в плоскости контакта между шиной и поверхностью качения, с вертикальной нагрузкой, действующей на шину, с продольным проскальзыванием и/или с углом увода шины.
В предпочтительном варианте осуществления модуль мониторинга содержит контрольно-измерительное устройство, расположенное на шине и выполненное с возможностью обнаружения деформаций, которым подвергается шина во время качения. Контрольно-измерительное устройство предпочтительно содержит акселерометр двухкомпонентного или трехкомпонентного типа, взаимодействующий с внутренней поверхностью шины на ее части, противоположной по отношению к протектору.
Модуль мониторинга может содержать GPS-приемник и/или датчик положения, предусмотренный в антиблокировочной тормозной системе (ABS), и/или фоническое колесо и/или гироскоп.
Дополнительные характеристики и преимущества настоящего изобретения станут ясными из нижеследующего подробного описания некоторых приведенных в качестве примера вариантов его осуществления, представленных только в качестве неограничивающих примеров, при этом указанное описание выполнено со ссылкой на приложенные чертежи, на которых:
- фиг.1 схематически показывает три примера кривых «трение контактного взаимодействия - проскальзывание», характерных для трех разных поверхностей качения, соответствующих трем разным величинам потенциального трения;
- фиг.2 схематически показывает систему для оценки потенциального трения в соответствии с одним вариантом осуществления изобретения;
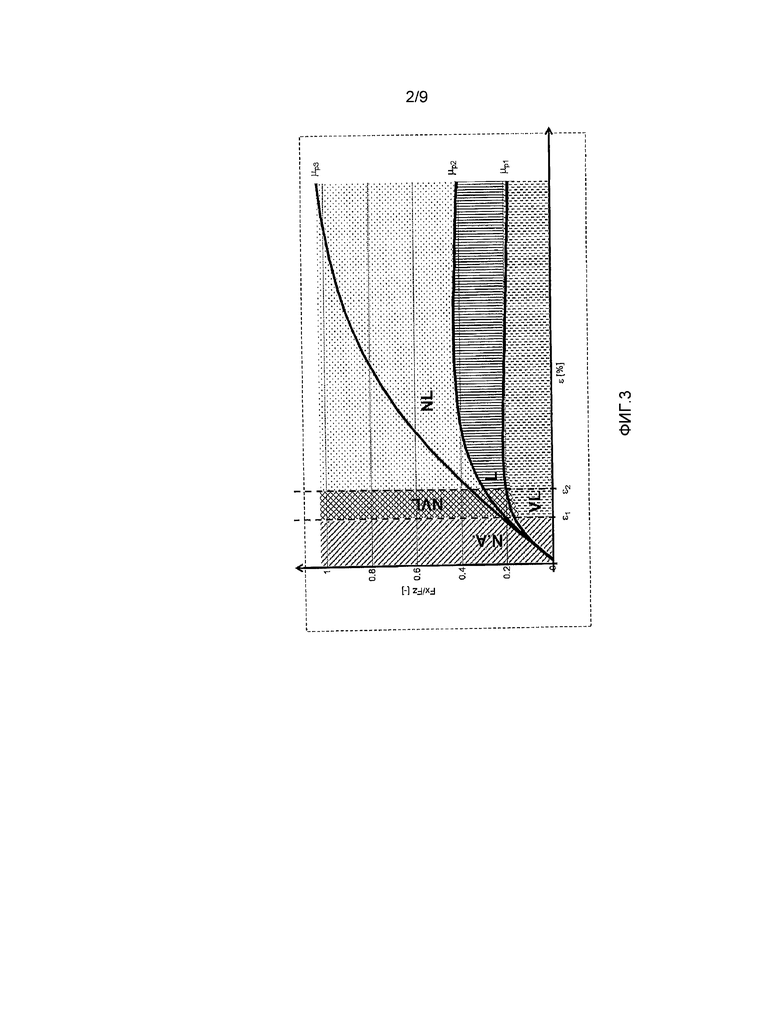
- фиг.3 показывает график зависимости трения контактного взаимодействия от проскальзывания с тремя примерами кривых, характерных для трех разных поверхностей качения, схематически иллюстрирующий работу алгоритма оценки в соответствии с одним вариантом осуществления изобретения, в котором используются две пороговые величины проскальзывания и две базовые кривые «трение контактного взаимодействия - проскальзывание»;
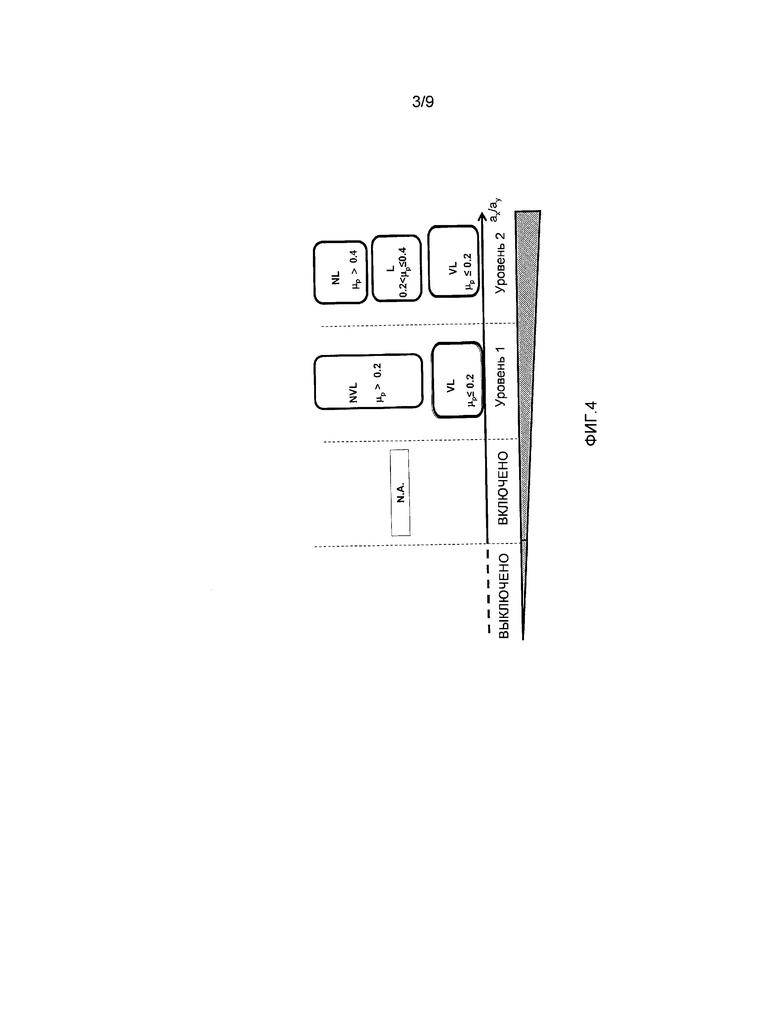
- фиг.4 схематически показывает три рабочие зоны алгоритма оценки потенциального трения в соответствии с изобретением в зависимости от продольной/боковой составляющей ускорения транспортного средства;
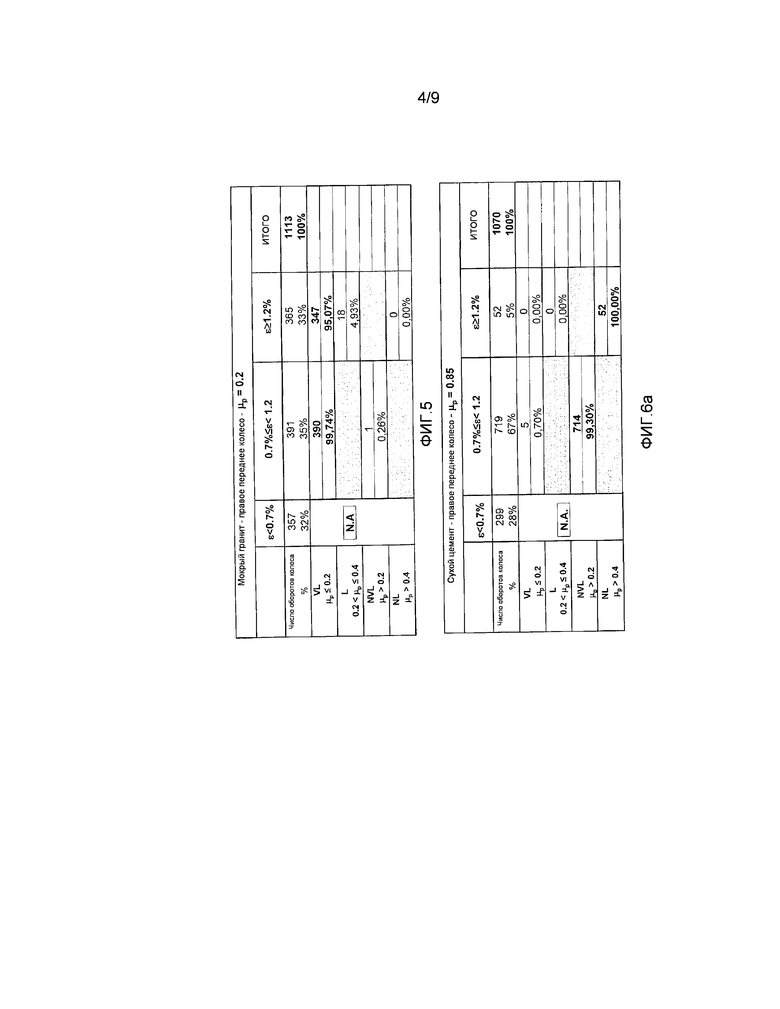
- фиг.5-9 показывают результаты экспериментальных исследований, выполненных Заявителем для оценки характеристик способа и системы по изобретению;
- фиг.10 показывает график зависимости трения контактного взаимодействия от проскальзывания с тремя примерами кривых, характерных для трех разных поверхностей качения, схематически иллюстрирующий работу алгоритма оценки в соответствии с одним вариантом осуществления изобретения, в котором используются две пороговые величины трения контактного взаимодействия и две базовые кривые «трение контактного взаимодействия - проскальзывание»;
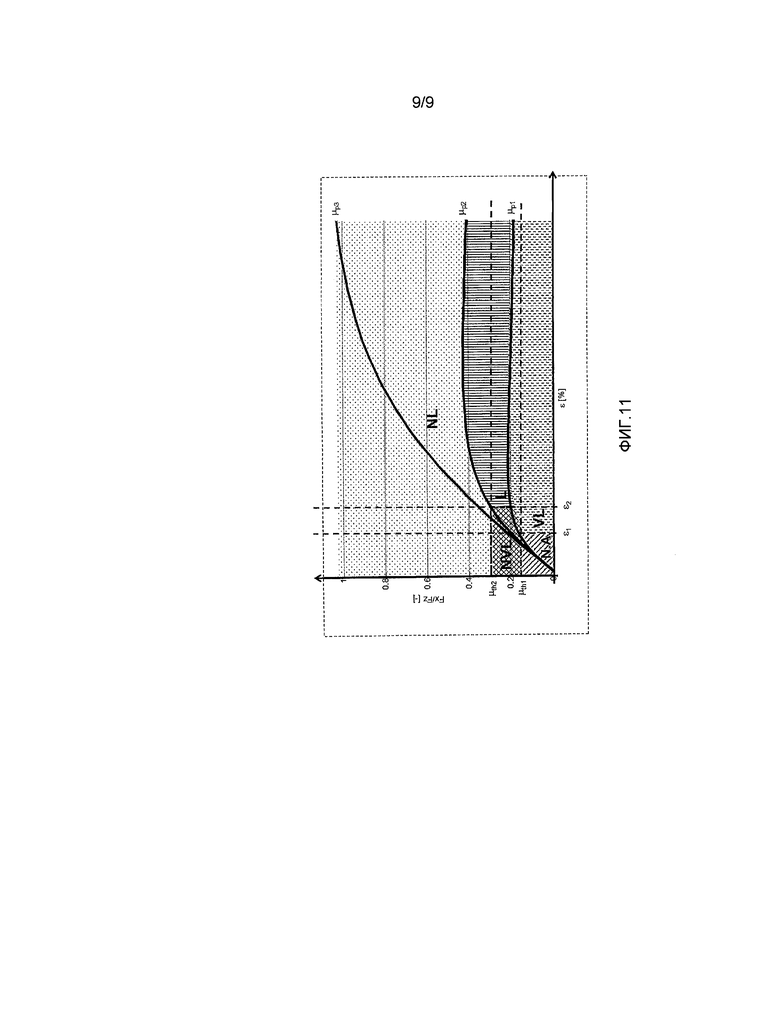
- фиг.11 показывает график зависимости трения контактного взаимодействия от проскальзывания с тремя примерами кривых, характерных для трех разных поверхностей качения, схематически иллюстрирующий работу алгоритма оценки в соответствии с одним вариантом осуществления изобретения, в котором используются как две пороговые величины проскальзывания, так и две пороговые величины трения контактного взаимодействия и две базовые кривые «трение контактного взаимодействия - проскальзывание».
В нижеследующем описании для иллюстрации чертежей будут использованы идентичные ссылочные позиции для обозначения конструктивных элементов с одной и той же функцией.
Фиг.2 показывает систему, обозначенную в целом ссылочной позицией 100 и предназначенную для оценки потенциального трения между шиной транспортного средства и поверхностью качения.
Система 100 содержит, по меньшей мере, один модуль обработки, выполненный с возможностью выполнения оценки в соответствии с изобретением.
Указанный, по меньшей мере, один модуль обработки может быть выполнен посредством соответствующим образом конфигурированного аппаратного обеспечения, программного обеспечения и/или встроенного программного обеспечения.
Например, система 100 может содержать модуль 150 мониторинга, модуль 110 для оценки трения μ контактного взаимодействия, модуль 120 для оценки кинематических величин ε/α, память 130 и модуль 140 для оценки потенциального трения μр.
Модуль 150 мониторинга может быть размещен на транспортном средстве и/или на шине и конфигурирован для определения (как правило, посредством приема сигналов) и обработки физических величин, коррелированных с продольными и/или боковыми силами, обменными в плоскости контакта между шиной и поверхностью качения, с вертикальной нагрузкой, действующей на шину, с продольным проскальзыванием и/или с углом увода шины.
Модуль 110 конфигурирован для определения трения μ контактного взаимодействия в продольном и/или боковом направлениях на основе величин, определяемых модулем 150 мониторинга.
Модуль 120 конфигурирован для определения (продольного) проскальзывания ε и/или угла α увода шины на основе величин, определяемых модулем 150 мониторинга.
В памяти 130 хранятся заданные базовые кривые «трение контактного взаимодействия/кинематическая величина» μ(ε/α) и заданные пороговые значения εi кинематической величины и/или заданные пороговые величины μthi трения контактного взаимодействия.
В памяти 130 также могут храниться величины потенциального трения, оцененные в соответствии со способом оценки по изобретению и/или значения кинематических величин и/или величины трения контактного взаимодействия, определенные модулями 110 и 120.
Модуль 140 конфигурирован для выполнения алгоритма оценки потенциального трения μр в соответствии с идеями настоящего изобретения на основе данных, предоставленных модулями 110, 120 и 130.
Также следует отметить, что, если в примере с фиг.2 модули 110, 120, 130, 140, 150 показаны как отдельные объекты, они могут образовывать один модуль или модули с другим количеством и/или объединенные иначе, чем проиллюстрировано.
Модули 110, 120 и 140 предпочтительно конфигурированы для выполнения вышеупомянутых измерений/оценок в заданные моменты времени (например, при каждом обороте колеса или в соответствии с заданной частотой).
Модуль 150 мониторинга может содержать контрольно-измерительное устройство, размещенное на шине и выполненное с возможностью обнаружения деформаций, которым подвергается шина во время качения (содержащее, например, акселерометр двухкомпонентного или трехкомпонентного типа, взаимодействующий с внутренней поверхностью шины на ее части, противоположной по отношению к протектору), и/или GPS-приемник и/или датчик положения, предусмотренный в антиблокировочной тормозной системе (ABS), и/или фоническое колесо и/или гироскоп.
Продольные и боковые силы Fx, Fy, обменные в плоскости контакта между шиной и поверхностью качения, и вертикальная нагрузка Fz, действующая на шину, могут быть определены, например, посредством использования данных, предоставленных вышеупомянутым контрольно-измерительным устройством, размещенным на шине и выполненным с возможностью обнаружения деформаций, которым подвергается шина.
Продольное проскальзывание ε, определяемое следующим соотношением:
ε=(ωR-V)/ωR (при ускорении) или ε=(ωR-V)/V (при торможении),
может быть определено, например, посредством использования данных, предоставляемых датчиком положения, предусмотренным в антиблокировочной тормозной системе (ABS), или посредством фонического колеса для определения скорости ωR качения каждой шины, и данных, предоставляемых GPS-приемником, для определения скорости V движения транспортного средства вперед.
В свою очередь, угол α увода может быть определен, например, посредством использования данных, предоставляемых гироскопом и/или акселерометром.
Для простоты разъяснения в дальнейшем будет сделана ссылка на оценку потенциального трения исходя из данных по трению контактного взаимодействия в продольном направлении (определяемому как соотношение между продольной силой FX, обменной в плоскости контакта между шиной и поверхностью качения, и вертикальной нагрузкой FZ, действующей на шину) и по (продольному) проскальзыванию ε.
Фиг.3-4 схематически иллюстрируют принцип работы алгоритма оценки потенциального трения в соответствии с одним вариантом осуществления изобретения.
В соответствии с данным вариантом осуществления алгоритм содержит следующие шаги (выполняемые, например, при каждом обороте колеса или в соответствии с заданной частотой):
а) определение текущей рабочей точки для шины, задаваемой величиной трения FX/FZ контактного взаимодействия и значением текущего проскальзывания ε, которые предоставляются модулями 110 и 120;
b) сравнение текущего проскальзывания ε с первой пороговой величиной ε1 проскальзывания, предоставляемой посредством памяти 130;
с) если текущее проскальзывание ε меньше указанной первой пороговой величины ε1, выдачу результата, указывающего на то, что оценка потенциального трения не применима. Возможно, если можно было бы определить то, что имеется состояние свободного качения, можно было бы использовать алгоритм оценки потенциального трения, работающий при состоянии свободного качения;
d) если текущее проскальзывание ε больше указанной первой пороговой величины ε1, сравнение текущего проскальзывания ε также со второй пороговой величиной ε2 проскальзывания (при ε2>ε1), предоставляемым посредством памяти 130;
е) если текущее проскальзывание ε находится в диапазоне между указанным первой пороговой величиной ε1 и указанной второй пороговой величиной ε2 и
е1) если указанная рабочая точка находится выше первой базовой кривой «трение контактного взаимодействия - проскальзывание», которая соответствует первой опорной величине μр1 потенциального трения, исключение того, что величина потенциального трения равна указанной первой опорной величине μр1 или меньше указанной первой опорной величины μр1, то есть определение того, что величина потенциального трения превышает первую опорную величину μр1 потенциального трения (μр>μр1), и выдачу на выходе результата, указывающего на «не очень малое» (NVL) потенциальное трение;
е2) если указанная рабочая точка находится ниже или на указанной первой базовой кривой, определение того, что величина потенциального трения меньше указанной первой опорной величины μр1 потенциального трения или равна указанной первой опорной величине μр1 потенциального трения (μр≤μр1), и выдачу на выходе результата, указывающего на «очень малое» (VL) потенциальное трение;
f) если текущее проскальзывание ε превышает указанную вторую пороговую величину ε2,
f1) если указанная рабочая точка находится выше второй базовой кривой «трение контактного взаимодействия - проскальзывание», которая соответствует второй опорной величине μр2 потенциального трения (при этом μр2>μр1), исключение того, что величина потенциального трения равна указанной второй опорной величине μр2 или меньше указанной второй опорной величины μр2, то есть определение того, что потенциальное трение превышает вторую опорную величину μр2 потенциального трения (μр>μр2), и выдачу на выходе результата, указывающего на «не малое» (NL) потенциальное трение;
f2) если указанная рабочая точка находится между указанной первой базовой кривой и указанной второй базовой кривой, исключение того, что величина потенциального трения является очень малой, то есть определение того, что величина потенциального трения находится в диапазоне между указанной первой опорной величиной μр1 и указанной второй опорной величиной μр2 (μр1<μр≤μр2), и выдачу на выходе результата, указывающего на «малое» (L) потенциальное трение;
f3) если указанная рабочая точка находится ниже или на указанной первой базовой кривой, определение того, что величина потенциального трения меньше указанной первой опорной величины μр1 потенциального трения или равна указанной первой опорной величине μр1 потенциального трения (μр ≤ μр1), и выдачу на выходе результата, указывающего на «очень малое» (VL) потенциальное трение.
Фиг.3 показывает: первую базовую кривую, соответствующую первой опорной величине μр1 потенциального трения (при этом μр1 приблизительно равно 0,2); вторую базовую кривую, соответствующую второй опорной величине μр2 потенциального трения (при этом μр2 приблизительно равно 0,4); третью кривую «трение (FX/FZ) контактного взаимодействия - проскальзывание (ε)», соответствующую величине потенциального трения μр3, которая превышает μр2 (в данном примере μр3 приблизительно равно 1), и первую и вторую пороговые величины ε1 и ε2 проскальзывания, соответственно равные 0,7% и 1,2%. Вертикальные линии, соответствующие ε1 и ε2, разделяют плоскость (FX/FZ)/ε на три вертикальные рабочие зоны: первую зону с ε<ε1, в которой кривые «трение контактного взаимодействия - проскальзывание» расположены близко друг к другу и по существу не отличимы друг от друга; вторую зону с ε1<ε<ε2, в которой первая базовая кривая, соответствующая меньшему потенциальному трению (μр1 приблизительно равно 0,2), становится отличимой от остальных кривых, проходящих выше нее и соответствующих большему потенциальному трению, и третью зону с ε>ε2, в которой вторая базовая кривая, соответствующая потенциальному трению μр2, также становится отличимой от остальных кривых, проходящих выше нее и соответствующих большему потенциальному трению.
Первая пороговая величина ε1 соответствует величине проскальзывания, при которой первая базовая кривая, соответствующая меньшему потенциальному трению μр1, становится по существу отличимой от остальных кривых, соответствующих бóльшим величинам потенциального трения. В свою очередь, вторая пороговая величина ε2 соответствует величине проскальзывания, при которой вторая базовая кривая, соответствующая потенциальному трению μр2, превышающему μр1, становится по существу отличимой от третьей кривой, которая соответствует потенциальному трению μр3, превышающему μр2. Следует отметить, что, когда вторая пороговая величина ε2 будет определена, третья кривая не используется в данном варианте осуществления алгоритма оценки потенциального трения. Следовательно, отсутствует необходимость в хранении такой кривой в памяти 130.
В первой зоне оценка потенциального трения в соответствии с данным вариантом осуществления алгоритма по настоящему описанию не применима.
Во второй зоне система «шина - поверхность качения» находится в переходном режиме качения при проскальзывании (соответствующем значениям аx продольной составляющей ускорения), которое является сравнительно малым (ε1<ε<ε2). В этой зоне алгоритм позволяет различить две зоны: зону NVL с «не очень малым» потенциальным трением (μр>μр1) и зону VL с «очень малым» потенциальным трением (μр≤μр1). Кривые, соответствующие потенциальному трению (μр>μр1), по-прежнему расположены близко друг к другу в данной зоне, следовательно, в данном варианте осуществления алгоритма невозможно получить дополнительную информацию.
В третьей зоне система «шина - поверхность качения» находится в переходном режиме качения при проскальзывании (соответствующем значениям аx продольной составляющей ускорения), которое является бóльшим (ε>ε2). В этой зоне алгоритм позволяет различить три зоны: зону NL с «не малым» потенциальным трением (μр>μр2), зону L с «малым» потенциальным трением (μр1<μр≤μр2) и зону VL с «очень малым» потенциальным трением (μр≤μр1).
В соответствии с характеристикой алгоритма по изобретению оценку потенциального трения выполняют в соответствии с последовательной логикой, которая реализуется посредством последовательных уровней установления различий по мере продолжения переходного режима качения (например, при увеличении значения ах продольной составляющей ускорения по абсолютной величине).
В частности, как показано на фиг.4, при переходе от режима свободного качения (например, прямолинейного качения при почти постоянной низкой скорости) к переходному режиму качения (уровень 1) можно разграничить две зоны VL и NVL потенциального трения («очень малого» и «не очень малого»), чтобы затем перейти к обработке данных (уровень 2) по мере продолжения переходного режима качения для разграничения трех зон VL, L и NL потенциального трения («очень малого», «малого» и «не малого»).
Потенциальное трение μр между шиной и поверхностью качения оценивают с повышающейся точностью по мере роста величин проскальзывания, но при отсутствии необходимости достижения больших величин проскальзывания и/или трения контактного взаимодействия.
Благодаря последовательной логике можно получить полезную информацию о потенциальном трении (то есть начать исключать - уже для сравнительно малых величин ускорения/замедления - рискованные ситуации с очень малым потенциальным трением), как только доступные данные по трению контактного взаимодействия и проскальзыванию окажутся в зоне, в которой первая базовая кривая, соответствующая меньшему потенциальному трению, становится отличимой от остальных базовых кривых, соответствующих большему потенциальному трению. При этом существует возможность получения все более точной информации о потенциальном трении, когда остальные базовые кривые также становятся отличимыми от соответствующих базовых кривых, соответствующих большему потенциальному трению, по мере увеличения текущих величин трения контактного взаимодействия и/или текущих значений кинематической величины.
Как также показано позднее посредством описания результатов экспериментов, изобретение обеспечивает возможность быстрого исключения ситуаций, связанных с высоким риском, при сравнительно малых величинах проскальзывания (продольной составляющей ускорения), при отсутствии необходимости в ожидании бóльших величин проскальзывания (продольной составляющей ускорения), доступных для определения текущей величины потенциального трения с возрастающей точностью.
Кроме того, изобретение также обеспечивает возможность идентификации поверхностей качения с умеренно большим потенциальным трением при величинах трения контактного взаимодействия, далеких от величины потенциального трения рассматриваемой поверхности.
Возможность отличить базовую кривую от остальных кривых предпочтительно реализуется за счет учета дисперсии/точности экспериментальных данных, полученных посредством модуля 150 мониторинга. Чем выше точность и степень достоверности экспериментальных данных, тем в большей степени могут быть уменьшены пороговые величины ε1 и ε2 проскальзывания и тем в большей степени может быть уменьшена разность Δμр1/2 (при этом Δμр1/2=μр2-μр1) величин потенциального трения для первой и второй базовых кривых. В качестве примера, с учетом датчиков, доступных в настоящее время, базовые кривые могут быть выбраны такими, что величина Δμр1/2 будет составлять, по меньшей мере, 0,15, более предпочтительно - менее 0,30 (например, будет равна 0,20).
Первую базовую кривую, то есть базовую кривую, которая соответствует наименьшему потенциальному трению μр1, предпочтительно выбирают так, чтобы величина μр1 была равна, по меньшей мере, 0,15, более предпочтительно - 0,15≤μр1≤0,30.
Вторую базовую кривую, то есть базовую кривую, которая соответствует потенциальному трению μр2, превышающему μр1, предпочтительно выбирают так, чтобы величина μр2 была равна, по меньшей мере, 0,35, более предпочтительно - 0,35≤μр2≤0,50.
Первую базовую кривую, то есть базовую кривую, которая соответствует наименьшему потенциальному трению μр1, предпочтительно выбирают так, чтобы первая пороговая величина ε1 находилась в диапазоне 0,5%≤ε1≤0,9%.
Вторую базовую кривую, то есть базовую кривую, которая соответствует потенциальному трению μр2>μр1, предпочтительно выбирают так, чтобы вторая пороговая величина ε2 находилась в диапазоне 0,9%≤ε2≤1,5%, при этом ε2>ε1.
Для учета дисперсии/точности экспериментальных данных базовые кривые «трение контактного взаимодействия - проскальзывание» предпочтительно рассматривают с заданными полосами неопределенности. Например, в случае первой базовой кривой, соответствующей потенциальному трению μр1, все рабочие точки, которые обнаруживаются ниже или на базовой кривой, соответствующей потенциальному трению μр1+Δμ (например, при 0,05<Δμ<0,1), рассматриваются как точки с потенциальным трением, которое меньше или равно μр1. То же самое применимо для второй базовой кривой, соответствующей потенциальному трению μр2.
Следует отметить, что алгоритм оценки потенциального трения был описан выше в качестве примера с учетом двух пороговых величин ε1 и ε2 проскальзывания, двух базовых кривых, соответствующих потенциальному трению μр1 и μр2, и трех рабочих зон, определяемых величинами ε1 и ε2.
Тем не менее, алгоритм по изобретению может быть реализован с учетом N (при этом N>2) пороговых величин проскальзывания, выбранных на соответствующих N базовых кривых, в результате чего будут определены N+1 рабочих зон. N пороговых величин проскальзывания соответственно соответствуют величинам проскальзывания, при которых соответствующие N базовых кривых становятся по существу отличимыми от базовых кривых, соответствующих большему потенциальному трению. N базовых кривых и N пороговых величин проскальзывания предпочтительно будут храниться в памяти 130. Как только будет определена пороговая величина εN, соответствующая величине проскальзывания, при которой базовая кривая N, соответствующая потенциальному трению μрN, становится по существу отличимой от базовой кривой N+1, соответствующей потенциальному трению μрN+1>μрN, не нужно будет также хранить кривую N+1 в памяти 130. В каждой зоне, определяемой пороговыми величинами εi-εi+1 (при этом 1≤i≤N), алгоритм позволит разграничить i+1 зон величин потенциального трения, определяемых i базовыми кривыми, которые в подобной зоне отличимы от базовых кривых, соответствующих большему потенциальному трению. Таким образом, по мере увеличения N алгоритм позволит при повышающихся величинах ε проскальзывания различить все возрастающее число зон потенциального трения.
Например, в случае третьей пороговой величины ε3 проскальзывания, которая соответствует величине проскальзывания, при которой соответствующая третья базовая кривая, соответствующая потенциальному трению μр3>μр2, становится по существу отличимой от базовых кривых, соответствующих большему потенциальному трению, третья базовая кривая предпочтительно может быть выбрана так, что μр3≥0,55, более предпочтительно - 0,55≤μр2≤0,8, и/или так, что 1,5%≤ε3≤2,5%.
Как правило, когда имеется больше двух пороговых величин/кривых, подобные кривые выбирают так, чтобы пороговая величина проскальзывания с наибольшим значением предпочтительно была меньше или равна приблизительно 5%.
Также следует отметить, что, несмотря на то, что алгоритм оценки потенциального трения подробно описан в представленном описании со ссылкой на трение Fx/Fz контактного взаимодействие и (продольное) проскальзывание ε, алгоритм по изобретению применим совершенно аналогично также для случая, в котором оценку потенциального трения выполняют исходя из данных по трению контактного взаимодействия в боковом направлении (определяемому соотношением между продольной силой FY, обменной в плоскости контакта между шиной и поверхностью качения, и вертикальной нагрузкой FZ, действующей на шину) и по углу α увода.
В этом случае первую базовую кривую, то есть базовую кривую, которая соответствует наименьшему потенциальному трению μр1, предпочтительно выбирают так, чтобы первое пороговое значение α1 находилось в диапазоне 0,5°≤α1≤1,2°.
Вторую базовую кривую, то есть базовую кривую, которая соответствует потенциальному трению μр2>μр1, предпочтительно выбирают так, чтобы второе пороговое значение α2 находилось в диапазоне 1,2°≤α2≤2,5°, при этом α2>α1.
В предпочтительном варианте осуществления алгоритм оценки потенциального трения конфигурирован для установления того, определять ли потенциальное трение исходя из данных по трению контактного взаимодействия в боковом направлении и углу α увода и/или исходя из данных по трению контактного взаимодействия в продольном направлении и проскальзыванию ε, в зависимости от заданного состояния системы «шина - поверхность качения».
Например, алгоритм оценки потенциального трения может быть конфигурирован для использования данных по трению контактного взаимодействия в боковом направлении и углу α увода, когда боковая составляющая ускорения шины превышает по абсолютной величине заданную величину боковой составляющей ускорения (например, 1 м/с2), или данных по трению контактного взаимодействия в продольном направлении и (продольному) проскальзыванию ε, когда боковая составляющая ускорения шины по абсолютной величине меньше указанной заданной величины боковой составляющей ускорения (например, 1 м/с2) и продольная составляющая ускорения шины превышает по абсолютной величине заданную величину продольной составляющей ускорения (например, 0,2 м/с2).
Для оценки характеристик изобретения Заявитель выполнил экспериментальные исследования, в которых величины потенциального трения оценивались посредством использования алгоритма оценки в соответствии с одним вариантом осуществления изобретения такого типа, как проиллюстрированный на фиг.3, с двумя пороговыми величинами (ε1=0,7%, ε2=1,2%) проскальзывания и двумя базовыми кривыми (μр1 приблизительно равно 0,2, μр2 приблизительно равно 0,4).
Испытания были выполнены с шинами Pirelli PZero™, установленными на транспортном средстве Volvo S60, перемещающемся по разным поверхностям качения.
Фиг.5 показывает результаты, полученные на поверхности качения на мокром граните с измеренным потенциальным трением μр, равным приблизительно 0,2, для переднего правого колеса, при динамике в продольном направлении (трении контактного взаимодействия и продольном проскальзывании, с данными по проскальзыванию, получаемыми посредством фонического колеса), для прямолинейного качения и транспортного средства, ускоряющегося от скорости 20 км/ч при максимальном ускорении 1 м/с2.
Результаты предоставляются в виде числа оборотов колеса и выраженной в процентах доли числа оборотов колеса относительно общего числа выполненных оборотов колеса.
Как можно видеть, в условиях испытаний система находилась в зоне по существу свободного качения (ε<0,7%) для 32% оборотов колеса, в зоне малого проскальзывания (0,7%≤ε<1,2%) для 35% оборотов колеса и в зоне большего проскальзывания (ε≥1,2%) для 33% оборотов колеса. Следовательно, алгоритм позволил обеспечить результат оценки для 68% выполненных оборотов колеса.
В зоне малого проскальзывания (0,7%≤ε<1,2%) алгоритм обеспечил корректный результат (VL, «очень малое» потенциальное трение μр≤0,2) при 390 оборотах из 391 оборота, выполненного в подобной зоне (99,74%). В зоне большого проскальзывания (ε ≥ 1,2%) алгоритм обеспечил корректный результат при 347 оборотах из 365 оборотов, выполненных в подобной зоне (95,07%). 18 ошибок, сделанных в данной последней зоне, имели место при оценке величины «малого» потенциального трения (L, 0,2<μр≤0,4). С другой стороны, алгоритм не обеспечил никакой оценки величины «не малого» потенциального трения (NL, μр>0,4).
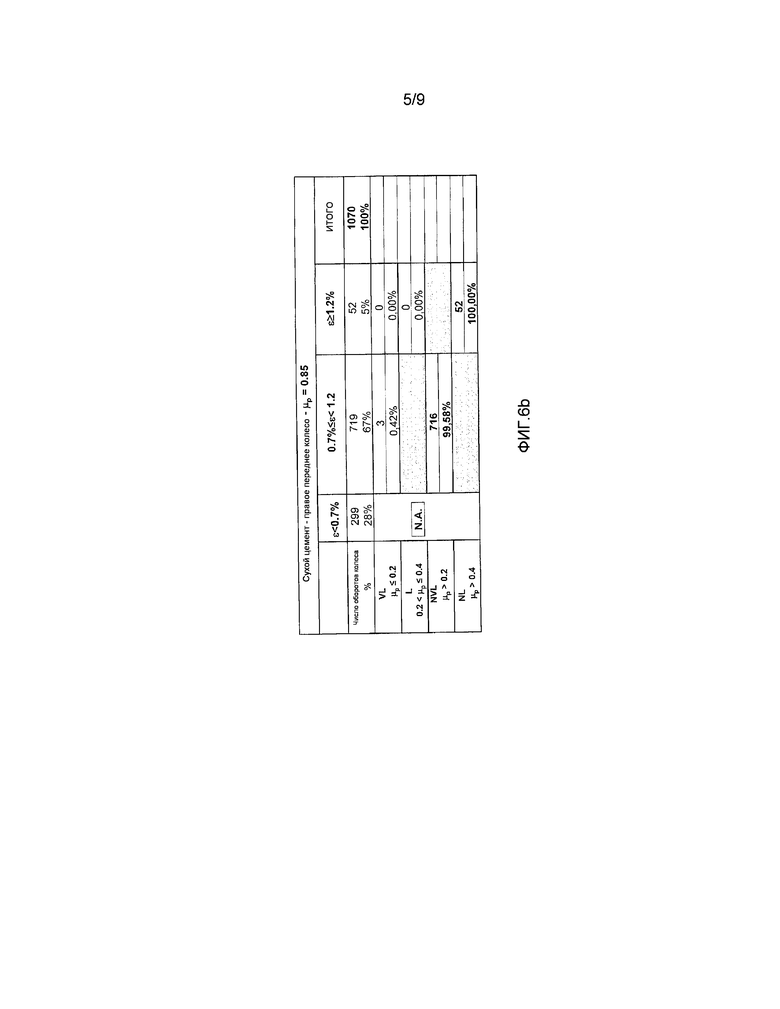
Фиг.6а показывает результаты, полученные в условиях, аналогичных условиям испытаний, которые дали результаты, показанные на фиг.5, за исключением того, что испытания были выполнены на поверхности качения на сухом цементе с потенциальным трением μр=0,85 и при максимальном ускорении 3 м/с2.
Как можно видеть, в условиях испытаний система находилась в режиме по существу свободного качения (ε<0,7%) для 28% оборотов колеса, в зоне малого проскальзывания (0,7% ≤ ε<1,2%) для 67% оборотов колеса и в зоне большего проскальзывания (ε≥1,2%) для 5% оборотов колеса. Следовательно, алгоритм позволил обеспечить результат оценки для 72% выполненных оборотов колеса.
В зоне малого проскальзывания (0,7%≤ε<1,2%) алгоритм обеспечил корректный результат (NVL, «не очень малое» потенциальное трение μр>0,2) при 714 оборотах из 719 оборотов, выполненных в подобной зоне (99,30%). В зоне большого проскальзывания (ε≥1,2%) алгоритм обеспечил корректный результат (NL, «не малое» потенциальное трение μр>0,4) при 52 оборотах из 52 оборотов, выполненных в подобной зоне (100,00%).
Фиг.6b показывает результаты, полученные в таких же условиях испытаний, какие привели к результатам, показанным на фиг.6а, за исключением того, что вместо получения данных по проскальзыванию посредством фонического колеса эти данные были получены посредством контрольно-измерительного устройства, размещенного на внутренней поверхности шины в части, противоположной по отношению к протектору, и снабженного трехкомпонентным акселерометром для обнаружения деформаций, которым подвергается шина во время качения. В данном последнем случае в зоне малого проскальзывания (0,7%≤ε<1,2%) алгоритм обеспечил корректный результат (NVL, «не очень малое» потенциальное трение μр>0,2) при 716 оборотах из 719 оборотов, выполненных в подобной зоне (99,58%). Остальные данные аналогичны данным, показанным на фиг.6а.
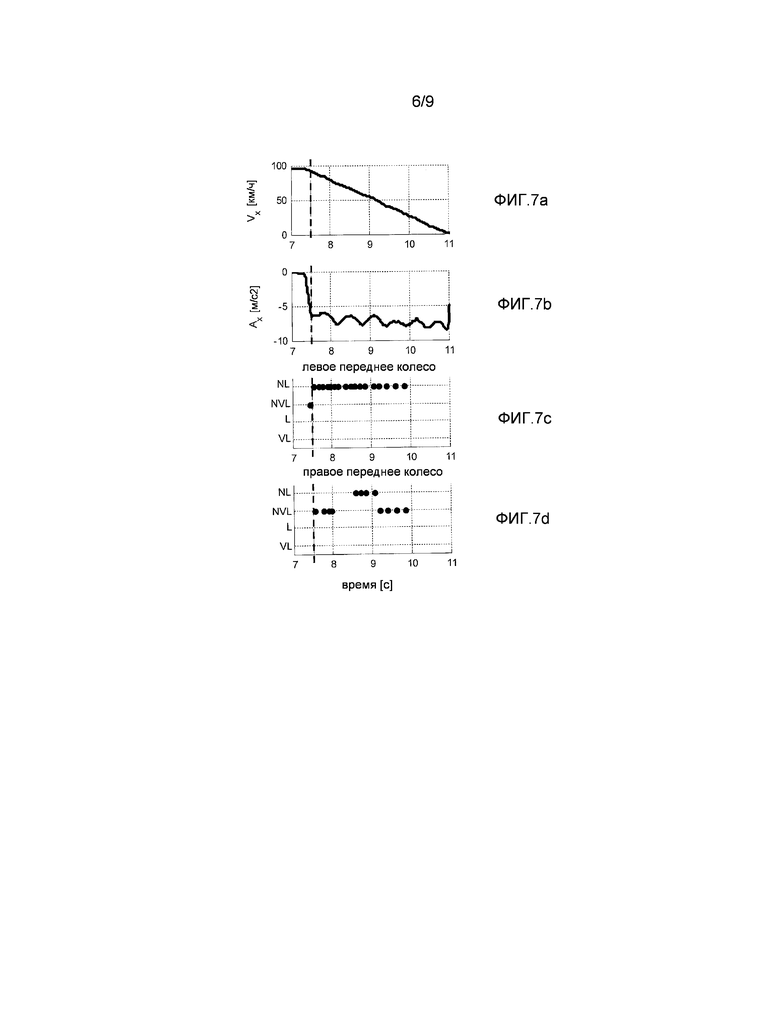
Фиг.7а-7d показывают результаты тестирования алгоритма оценки в соответствии с изобретением по отношению к срабатыванию антиблокировочной тормозной системы (ABS).
Испытания были выполнены с шинами Pirelli PZero™, установленными на транспортном средстве Volvo S60.
В частности, фиг.7а показывает динамику скорости транспортного средства в течение определенного числа секунд маневрирования (показанного на абсциссе) в условиях прямолинейного качения на поверхности с высокой удерживающей способностью на сухом асфальте при μр, приблизительно равном 1; фиг.7b показывает соответствующую величину ускорения; фиг.7с и 7d показывают уровни потенциального трения, оцененные посредством алгоритма оценки в соответствии с изобретением, соответственно для левого переднего колеса и для правого переднего колеса транспортного средства. Пунктирная вертикальная линия при приблизительно 7,5 секундах представляет на фигурах момент срабатывания антиблокировочной тормозной системы (ABS). Как можно видеть, алгоритм оценки в соответствии с изобретением позволяет получить первую оцененную величину потенциального трения (μр>0,2, «не очень малого», NVL) перед воздействием антиблокировочной тормозной системы (ABS).
В антиблокировочной тормозной системе (ABS), которая работает по разной логике воздействия в соответствии с тем, находится ли транспортное средство в состоянии малого или большого потенциального трения, подобная информация может быть очень полезной для создания возможности для системы «знать» заранее (возможно, даже перед ее реальным срабатыванием), какую из двух логик выбрать.
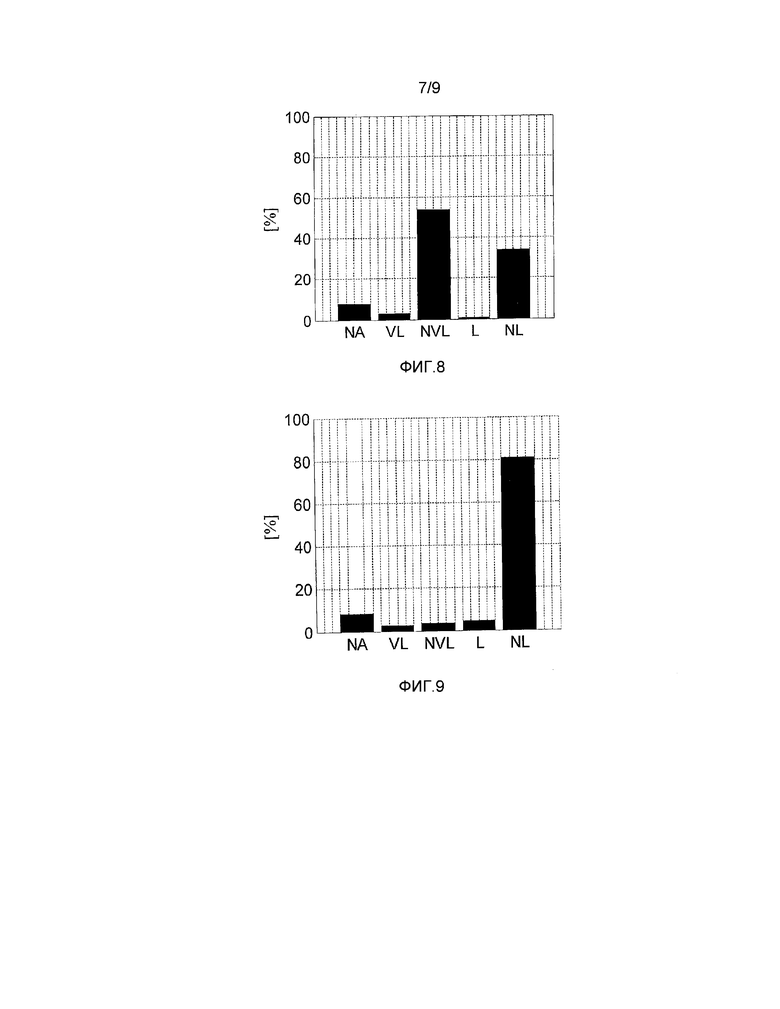
Фиг.8 показывает результаты оценки потенциального трения, полученные с шинами Pirelli PZero™, установленными на транспортном средстве Volvo S60, на сухом асфальте (μр приблизительно равно 1) посредством алгоритма оценки в соответствии с одним вариантом осуществления изобретения такого типа, как проиллюстрированный на фиг.3, для транспортного средства при динамике в продольном направлении, с двумя пороговыми величинами (ε1=0,7%, ε2=1,2%) проскальзывания и двумя базовыми кривыми (μр1 приблизительно равно 0,2, μр2 приблизительно равно 0,4).
Фиг.9 показывает аналогичные результаты, полученные при динамике в боковом направлении, с двумя пороговыми значениями угла увода (α1=1°, α2=2°) и двумя базовыми кривыми (μр1 приблизительно равно 0,2, μр2 приблизительно равно 0,4).
На фиг.8 и 9 аббревиатуры NA, VL, NVL, L, NL соответственно указывают результаты оценки, которые не доступны, очень малы (μр≤0,2), не очень малы (μр>0,2), малы (0,2<μр≤0,4), не малы (μр>0,4).
Результаты, ожидаемые для рассматриваемой поверхности сухого асфальта (μр1 приблизительно равно 1) составляли NVL (μр>2) для сравнительно малых величин ускорения в пределах зоны ε1 ≤ ε<ε2 или α1≤α<α2 и NL (μр>0,4), для бóльших величин ускорения в зоне ε>ε2 или α>α2.
На фиг.8 выраженная в процентах доля корректных результатов (NVL и NL), полученных в соответствии с последовательной логикой, образующей основу алгоритма оценки в соответствии с изобретением, достигает в целом 85%. На фиг.9 80% результатов находятся в зоне не малого (NL) потенциального трения (μр>0,4).
Выраженные в процентах доли результатов, которые не доступны, в любом случае составляют менее 10%.
В нижеприведенной Таблице 1 показаны величины продольной составляющей ускорения/замедления и соотношения трения контактного взаимодействия и потенциального трения μр, необходимые для достижения пороговых величин проскальзывания ε1=0,7% и ε2=1,2% для разных поверхностей качения при шинах Pirelli PZero™, установленных на транспортном средстве Volvo S60.
Как можно видеть, величины ускорения/замедления, необходимые для достижения первой пороговой величины ε1 и активизации алгоритма оценки в соответствии с изобретением, являются сравнительно малыми. Допустим, например, что при поездке по городу продольная составляющая ускорения, составляющая 0,7 м/с2, может быть превышена в течение 30% времени. Кроме того, стандартное торможение, как правило, предусматривает замедление, составляющее приблизительно 2-3 м/с2.
Также можно отметить, что выраженные в процентах соотношения, полученные для трения контактного взаимодействия/потенциального трения, когда достигается пороговая величина ε1, в любом случае составляют менее 50%. Это означает, что алгоритм оценки в соответствии с изобретением всегда срабатывал хорошо до того, как была достигнута величина потенциального трения рассматриваемой поверхности. Кроме того, выраженные в процентах соотношения, полученные для трения контактного взаимодействия/потенциального трения, когда была достигнута пороговая величина ε2, находились в диапазоне между 40 и 80%. Следовательно, алгоритм оценки в соответствии с изобретением успешно сработал в зоне большого проскальзывания, в которой он позволяет различить три зоны потенциального трения значительно раньше, чем величина потенциального трения рассматриваемой поверхности будет достигнута. В нижеприведенной Таблице 2 показаны результаты, аналогичные результатам в Таблице 1, за исключением того, что рассматривается динамика в боковом направлении (трение Fy/Fz контактного взаимодействия в боковом направлении и угол α увода), пороговые значения α1=1° и α2=2° угла увода, три поверхности качения и значения боковых составляющих ускорения.
Следует отметить, что алгоритм оценки потенциального трения был описан выше в качестве примера с учетом пороговых величин εi проскальзывания.
Тем не менее, алгоритм по изобретению может быть реализован совершенно аналогично при учете пороговых величин трения контактного взаимодействия вместо вышеупомянутых пороговых величин проскальзывания.
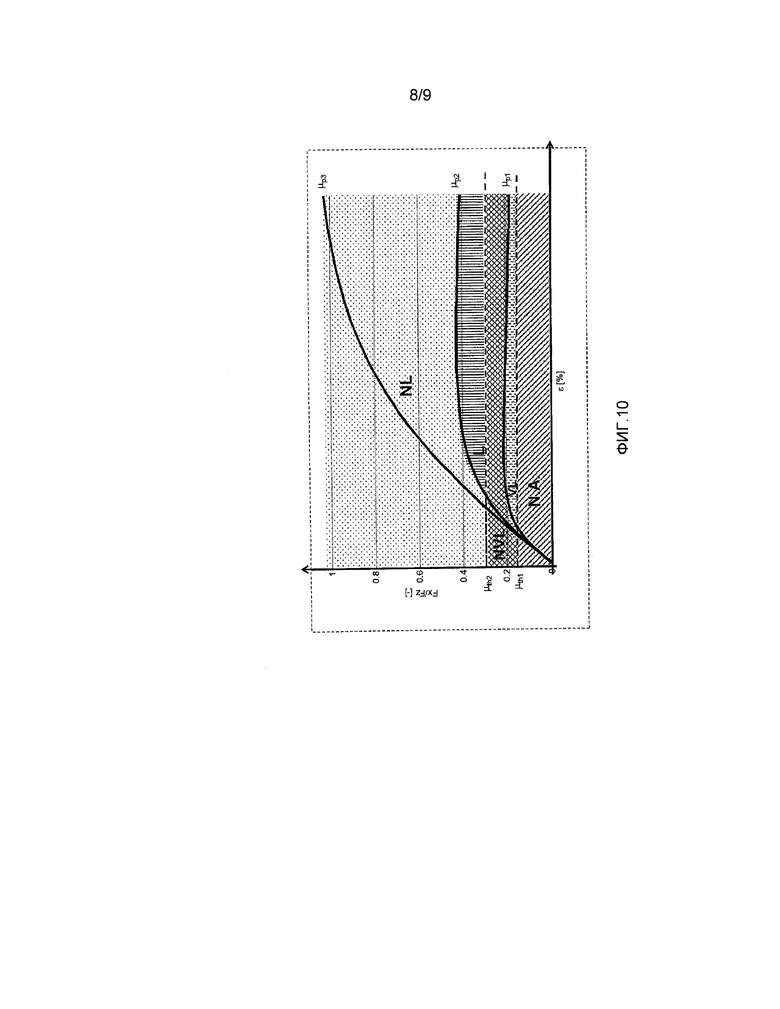
Вариант осуществления реализации данного типа схематически проиллюстрирован на фиг.10, показывающей первую базовую кривую, соответствующую первой опорной величине μр1 потенциального трения (при этом μр1 приблизительно равно 0,2); вторую базовую кривую, соответствующую второй опорной величине μр2 потенциального трения (при этом μр2 приблизительно равно 0,4); третью базовую кривую, соответствующую третьей опорной величине μр3 потенциального трения, при этом μр3>μр2 (в примере μр3 приблизительно равно 1), и первую и вторую пороговые величины трения контактного взаимодействия μth1 и μth2, при этом μth2>μр1>μth1.
Аналогично тому, что описано выше со ссылкой на пороговые величины проскальзывания, первая пороговая величина μth1 соответствует величине трения контактного взаимодействия, при которой первая базовая кривая, соответствующая меньшему потенциальному трению μр1, становится по существу отличимой от остальных кривых, соответствующих бóльшим величинам μр2, μр3 потенциального трения. В свою очередь, вторая пороговая величина μth2 соответствует величине трения контактного взаимодействия, при которой вторая базовая кривая, соответствующая потенциальному трению μр2, превышающему μр1, становится по существу отличимой от третьей базовой кривой, соответствующей большему потенциальному трению μр3.
Первую базовую кривую предпочтительно выбирают так, чтобы μр1 было равно, по меньшей мере, 0,15, более предпочтительно - 0,15≤μр1≤0,3.
Вторую базовую кривую предпочтительно выбирают так, чтобы μр2 было равно, по меньшей мере, 0,35, более предпочтительно - 0,35≤μр2≤0,50.
Первую базовую кривую предпочтительно выбирают так, чтобы первая пороговая величина μth1 находилась в пределах диапазона 0,05≤μth1≤0,20 (в примере μth1=0,15).
Вторую базовую кривую предпочтительно выбирают так, чтобы вторая пороговая величина μth2 находилась в диапазоне 0,25≤μth2≤0,40 (в примере μth2=0,3).
В соответствии с вариантом осуществления по фиг.10 алгоритм включает следующие этапы (выполняемые, например, при каждом обороте колеса или в соответствии с заданной частотой):
а) определение текущей рабочей точки для шины, определяемой величинами трения FX/FZ контактного взаимодействия и текущего проскальзывания ε, которые предоставляются модулями 110 и 120;
b) сравнение трения FX/FZ контактного взаимодействия с первой пороговой величиной μth1 трения контактного взаимодействия, предоставляемой посредством памяти 130;
с) если трение FX/FZ контактного взаимодействия меньше указанной первой пороговой величины μth1, выдачу результата, указывающего на то, что оценка потенциального трения не применима;
d) если трение FX/FZ контактного взаимодействия больше указанной первой пороговой величины μth1, сравнение трения FX/FZ контактного взаимодействия также со второй пороговой величиной μth2, предоставляемой посредством памяти 130;
е) если трение FX/FZ контактного взаимодействия находится в диапазоне между первой пороговой величиной μth1 и второй пороговой величиной μth2 и
е1) если указанная рабочая точка находится выше первой базовой кривой «трение контактного взаимодействия - проскальзывание», которая соответствует первой опорной величине μр1 потенциального трения, исключение того, что величина потенциального трения равна указанной первой опорной величине μр1 или меньше указанной первой опорной величины μр1, то есть определение того, что величина потенциального трения превышает первую опорную величину μр1 потенциального трения, и выдачу на выходе результата, указывающего на «не очень малое» потенциальное трение (NVL, μр>μр1);
е2) если указанная рабочая точка находится ниже или на указанной первой базовой кривой, определение того, что величина потенциального трения меньше указанной первой опорной величины μр1 потенциального трения или равна указанной первой опорной величине μр1 потенциального трения, и выдачу на выходе результата, указывающего на «очень малое» потенциальное трение (VL, μр≤μр1);
f) если трение FX/FZ контактного взаимодействия больше указанной второй пороговой величины μth2,
f1) если указанная рабочая точка находится выше второй базовой кривой «трение контактного взаимодействия - проскальзывание», которая соответствует второй опорной величине μр2 потенциального трения, исключение того, что величина потенциального трения равна указанной второй опорной величине μр2 или меньше указанной второй опорной величины μр2, то есть определение того, что потенциальное трение превышает вторую опорную величину μр2 потенциального трения, и выдачу на выходе результата, указывающего на «не малое» потенциальное трение (NL, μр>μр2);
f2) если указанная рабочая точка находится между указанной первой базовой кривой и указанной второй базовой кривой (то есть она находится ниже или на второй базовой кривой), исключение того, что величина потенциального трения является очень малой, то есть определение того, что величина потенциального трения находится в диапазоне между указанной первой опорной величиной μр1 и указанной второй опорной величиной μр2, и выдачу на выходе результата, указывающего на «малое» потенциальное трение (L, μр1<μр ≤ μр2).
Следует отметить, что алгоритм оценки потенциального трения был описан выше в качестве примера с учетом или пороговых величин εi проскальзывания, или пороговых величин μi трения контактного взаимодействия.
Использование одного или другого типа порогового значения/пороговой величины может быть задано, например, исходя из точности и/или степени достоверности экспериментальных данных и/или на основе заданных требований к рабочим характеристикам. Например, в случае большей точности/степени достоверности данных по трению контактного взаимодействия, может быть предпочтительным использование пороговых величин трения контактного взаимодействия. С другой стороны, в случае большей точности/степени достоверности данных по проскальзыванию, может быть предпочтительным использование пороговых величин проскальзывания. Кроме того, в применениях, в которых требуется более быстро разграничить (то есть при малых величинах проскальзывания) малые величины потенциального трения, может быть предпочтительным использование пороговых величин проскальзывания. С другой стороны, в применениях, в которых требуется более быстро разграничить большие величины потенциального трения, может быть предпочтительным использование пороговых величин потенциального трения.
Также следует отметить, что в соответствии с предпочтительным вариантом осуществления алгоритм по изобретению может быть реализован совершенно аналогично тому, что было описано выше со ссылкой на фиг.3 и 10, но с учетом обеих пороговых величин трения контактного взаимодействия и пороговых величин проскальзывания (или угла увода).
Пример данного типа реализации схематически проиллюстрирован на фиг.11, на которой помимо базовых кривых и пороговых величин μth1 и μth2 потенциального трения по фиг.10 показаны пороговые величины ε1 и ε2 проскальзывания, аналогичные тем, которые показаны на фиг.3.
В соответствии с вариантом осуществления по фиг.11 алгоритм при сравнении рабочих точек, определяемых посредством пороговых величин μth1 и μth2 потенциального трения и пороговых величин ε1 и ε2 проскальзывания, позволяет идентифицировать пять зон потенциального трения: зону N.A. («не применимо, нет данных»), определяемую соотношениями μ<μth1 и ε<ε1, в которой алгоритм не позволяет выполнить оценку потенциального трения; зону NVL, определяемую соотношениями μth1<μ<μth2, ε<ε2 и рабочими точками, находящимися выше первой базовой кривой, в которой алгоритм обеспечивает оценку «не очень малого» потенциального трения (μр>μр1); зону VL, определяемую соотношением ε>ε1 и рабочими точками, находящимися на или ниже первой базовой кривой, в которой алгоритм обеспечивает оценку «очень малого» потенциального трения (μр≤μр1); зону L, определяемую соотношением ε>ε2 и рабочими точками, находящимися между первой и второй базовыми кривыми, в которой алгоритм обеспечивает оценку «малого» потенциального трения (μр1<μр≤μр2); зону NL, определяемую соотношением μ>μth2 и рабочими точками, находящимися выше второй базовой кривой, в которой алгоритм обеспечивает оценку «не малого» потенциального трения (μр>μр2).
В частности, алгоритм будет включать следующие этапы (выполняемые, например, при каждом обороте колеса или в соответствии с заданной частотой):
1) определение текущей рабочей точки для шины, определяемой величинами трения FX/FZ контактного взаимодействия и текущего проскальзывания ε, которые предоставляются модулями 110 и 120;
2) сравнение текущего проскальзывания ε с первой пороговой величиной ε1 проскальзывания и трения FX/FZ контактного взаимодействия с первой пороговой величиной μth1 трения контактного взаимодействия;
3) если как текущее проскальзывание ε, так и трение FX/FZ контактного взаимодействия меньше соответствующих первых пороговых величин ε1 и μth1, выдачу результата, указывающего на то, что оценка потенциального трения не применима, или отсылку к алгоритму оценки потенциального трения, работающему при режиме свободного качения;
4) если только текущее проскальзывание ε меньше первой пороговой величины ε1:
- если трение FX/FZ контактного взаимодействия находится в диапазоне между первой и второй пороговыми величинами μth1 и μth2 трения контактного взаимодействия, определение того, что величина потенциального трения превышает первую опорную величину μр1 потенциального трения, и выдачу на выходе результата, указывающего на «не очень малое» потенциальное трение (NVL, μр>μр1);
- если трение FX/FZ контактного взаимодействия превышает вторую пороговую величину μth2 трения контактного взаимодействия, определение того, что величина потенциального трения превышает вторую опорную величину μр2 потенциального трения, и выдачу на выходе результата, указывающего на «не малое» потенциальное трение (NL, μр>μр2);
5) если текущее проскальзывание ε находится в диапазоне между первой и второй пороговыми величинами ε1 и ε2:
- если рабочая точка находится выше первой базовой кривой «трение контактного взаимодействия - проскальзывание» и если трение FX/FZ контактного взаимодействия находится в диапазоне между первой и второй пороговыми величинами μth1 и μth2 трения контактного взаимодействия, определение того, что величина потенциального трения превышает первую опорную величину μр1 потенциального трения, и выдачу на выходе результата, указывающего на «не очень малое» потенциальное трение (NVL, μр>μр1);
- если рабочая точка находится выше первой базовой кривой «трение контактного взаимодействия - проскальзывание» и если трение FX/FZ контактного взаимодействия превышает вторую пороговую величину μth2 трения контактного взаимодействия, определение того, что величина потенциального трения превышает вторую опорную величину μр2 потенциального трения, и выдачу на выходе результата, указывающего на «не малое» потенциальное трение (NL, μр>μр2);
- если рабочая точка находится ниже или на указанной первой базовой кривой, определение того, что величина потенциального трения меньше указанной первой опорной величины μр1 потенциального трения или равна указанной первой опорной величине μр1 потенциального трения, и выдачу на выходе результата, указывающего на «очень малое» потенциальное трение (VL, μр ≤ μр1);
6) если текущее проскальзывание ε больше второй пороговой величины ε2, выполнение действий, подобных описанным в пунктах f1) - f3) со ссылкой на фиг.3-4.
Аналогичным образом, вместо выполнения действий в соответствии с пунктами 4)-6), алгоритм оценки может продолжаться после пункта 3) следующим образом:
4’) ‘если трение FX/FZ контактного взаимодействия меньше первой пороговой величины μth1:
- если текущее проскальзывание ε больше первой пороговой величины ε1 проскальзывания, определение того, что величина потенциального трения меньше указанной первой опорной величины μр1 потенциального трения или равна указанной первой опорной величине μр1 потенциального трения, и выдачу на выходе результата, указывающего на «очень малое» потенциальное трение (VL, μр≤μр1);
5’) ‘если трение FX/FZ контактного взаимодействия находится в диапазоне между первой и второй пороговыми величинами μth1 и μth2:
- если рабочая точка находится ниже или на указанной первой базовой кривой, определение того, что величина потенциального трения меньше указанной первой опорной величины μр1 потенциального трения или равна указанной первой опорной величине μр1 потенциального трения, и выдачу на выходе результата, указывающего на «очень малое» потенциальное трение (VL, μр≤μр1);
- если текущее проскальзывание ε меньше второй пороговой величины ε2 проскальзывания и если рабочая точка находится выше первой базовой кривой «трение контактного взаимодействия - проскальзывание», определение того, что величина потенциального трения превышает первую опорную величину μр1 потенциального трения, и выдачу на выходе результата, указывающего на «не очень малое» потенциальное трение (NVL, μр>μр1);
- если текущее проскальзывание ε больше второй пороговой величины ε2 проскальзывания и если рабочая точка находится выше первой базовой кривой «трение контактного взаимодействия - проскальзывание», определение того, что величина потенциального трения находится в диапазоне между указанной первой опорной величиной μр1 и указанной второй опорной величиной μр2, и выдачу на выходе результата, указывающего на «малое» потенциальное трение (L, μр1<μр≤μр2);
6’) ‘если трение FX/FZ контактного взаимодействия превышает вторую пороговую величину μth2, выполнение действий, подобных описанным в пунктах f1)-f2) со ссылкой на фиг.10.
Как можно видеть из сравнения между зонами, разграниченными в примерах по фиг.3 и 10, и зонами, разграниченными в примере по фиг.11, использование как пороговых величин проскальзывания, так и пороговых величин трения контактного взаимодействия обеспечивает возможность более детализированной оценки потенциального трения.
Кроме того, принимая во внимание то, что кривые трения, относящиеся к реальным поверхностям, могут отличаться от кривых, представленных базовыми кривыми на основе числовых значений (получаемыми и представленными/определенными в памяти 130 посредством известных моделей), Заявитель считает, что комбинированное использование пороговых величин проскальзывания и пороговых величин трения контактного взаимодействия гарантирует то, чтобы будут получены более точные оценки потенциального трения.
Как уже было указано выше со ссылкой на вариант осуществления по фиг.3, следует отметить, что, несмотря на то, что алгоритм оценки потенциального трения по вариантам осуществления по фиг.10 и 11 был подробно описан со ссылкой на трение Fx/Fz контактного взаимодействия и (продольное) проскальзывание ε, способ оценки по изобретению применим совершенно аналогично также для случая, в котором оценку потенциального трения выполняют исходя из данных по трению FY/FZ контактного взаимодействия в боковом направлении и по углу α увода.
Изобретение в различных вариантах его осуществления, обеспечивающее возможность выполнения в реальном времени оценки потенциального трения в системе «шина - поверхность качения», может быть очень полезным в системах активного управления динамическими характеристиками транспортного средства и для современных систем помощи водителю (ADAS), таких как системы адаптивного круиз-контроля (АСС), системы избежания столкновений, системы предаварийной безопасности, антиблокировочные тормозные системы (ABS) и аналогичные системы.
Например, как уже было указано выше, в антиблокировочной тормозной системе (ABS), которая работает по разной логике воздействия в соответствии с тем, находится ли транспортное средство в состоянии малого или большого потенциального трения, алгоритм оценки в соответствии с изобретением может быть очень важным для того, чтобы создать возможность для антиблокировочной тормозной системы (ABS) «знать» то, какую из двух логик выбрать заранее, возможно даже перед ее срабатыванием.
Кроме того, в случае систем для оценки и контроля безопасного расстояния или индикации скользкого состояния алгоритм оценки в соответствии с изобретением может быть очень полезным для обеспечения возможности работы подобных систем с оценками потенциального трения в реальном времени, что позволяет избежать выдачи ложных сигналов тревоги, которые создают беспокойство для пользователя, или, даже хуже, невыдачи сигнала пользователю о возможных опасных ситуациях.
Алгоритм оценки в соответствии с изобретением также может быть использован вместе с другими технологиями для получения улучшенных эксплуатационных характеристик. Например, он может быть использован вместе с технологиями для определения потенциального трения в режиме свободного качения и/или с технологиями, обеспечивающими возможность распознавания состояния системы «шина - поверхность качения» (например, шероховатости поверхности качения) и его изменений. В данном последнем случае применение скрещенной логики предпочтительно может создать возможность использования данных по потенциальному трению, оцененному посредством способа оценки по изобретению, даже тогда, когда транспортное средство больше не движется в переходном режиме качения, при условии, что состояние системы «шина - поверхность качения» остается по существу не измененным.
Настоящее изобретение относится к способу и системе (100) для оценки потенциального трения между шиной и поверхностью качения, согласно которым: строятся первая и вторая базовые кривые «трение контактного взаимодействия/кинематическая величина», соответственно соответствующие первой и второй опорным величинам μр1, μр2 потенциального трения, где μр2 > μр1; определяются первое и второе пороговые значения кинематической величины или первая и вторая пороговые величины трения контактного взаимодействия; определяется трение μ контактного взаимодействия между шиной и поверхностью качения; определяется текущее значение кинематической величины между шиной и поверхностью качения; определяется текущая рабочая точка, задаваемая трением μ контактного взаимодействия и текущим значением кинематической величины; текущее значение кинематической величины сравнивается с первым и вторым пороговыми значениями кинематической величины или соответственно трение μ контактного взаимодействия сравнивается с первой и второй пороговыми величинами трения контактного взаимодействия. Технический результат – повышение точности оценки трения между шиной и поверхностью качения. 2 н. и 21 з.п. ф-лы, 11 ил., 2 табл.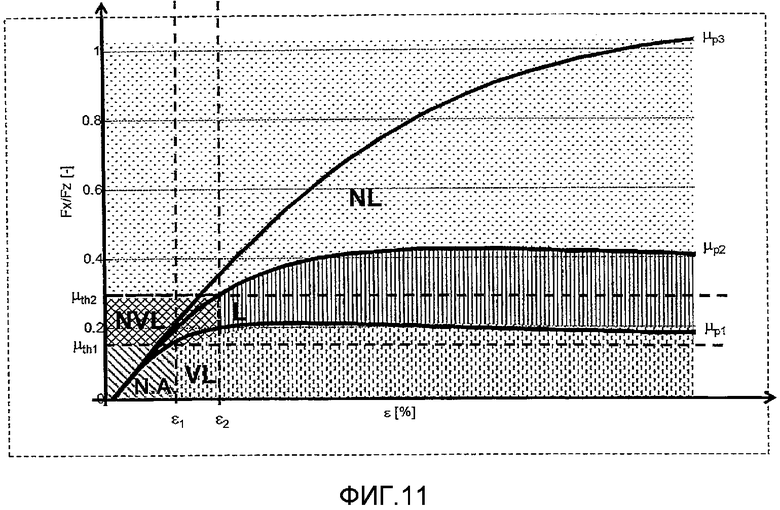
1. Способ оценки потенциального трения μр между шиной и поверхностью качения, включающий:
- построение первой и второй базовых кривых «трение контактного взаимодействия/кинематическая величина», соответственно соответствующих первой и второй опорным величинам μр1, μр2 потенциального трения, где μр2>μр1;
- получение первого и второго пороговых значений кинематической величины или первой и второй пороговых величин трения контактного взаимодействия, при этом первое пороговое значение соответствует значению кинематической величины или соответственно величине трения контактного взаимодействия, при котором первая базовая кривая, по существу, отличима от второй базовой кривой, и второе пороговое значение соответствует значению кинематической величины или соответственно величине трения контактного взаимодействия, при котором вторая базовая кривая, по существу, отличима от по меньшей мере одной третьей базовой кривой, соответствующей третьей опорной величине μр3 потенциального трения, где μр3>μр2;
- определение трения μ контактного взаимодействия между шиной и поверхностью качения;
- определение текущего значения кинематической величины между шиной и поверхностью качения;
- определение текущей рабочей точки, задаваемой трением μ контактного взаимодействия и текущим значением кинематической величины;
- сравнение текущего значения кинематической величины с первым и вторым пороговыми значениями кинематической величины или соответственно трения μ контактного взаимодействия с первой и второй пороговыми величинами трения контактного взаимодействия;
- если текущее значение кинематической величины или трения μ контактного взаимодействия находится в диапазоне между соответствующими первым и вторым пороговыми значениями и рабочая точка находится выше первой базовой кривой, определение того, что величина потенциального трения превышает первую опорную величину μр1;
- если текущее значение кинематической величины или трения μ контактного взаимодействия превышает соответствующее второе пороговое значение и рабочая точка находится выше второй базовой кривой, определение того, что величина потенциального трения превышает вторую опорную величину μр2 потенциального трения;
- если текущее значение кинематической величины или трения μ контактного взаимодействия превышает соответствующее второе пороговое значение и рабочая точка находится между первой и второй базовыми кривыми, определение того, что величина потенциального трения находится в диапазоне между первой опорной величиной μр1 потенциального трения и второй опорной величиной μр2 потенциального трения;
- если текущая кинематическая величина или трение μ контактного взаимодействия превышает соответствующее первое пороговое значение и рабочая точка не находится выше первой базовой кривой, определение того, что величина потенциального трения равна первой опорной величине μр1 или меньше нее.
2. Способ по п.1, при котором первую базовую кривую «трение контактного взаимодействия/кинематическая величина» выбирают так, чтобы она соответствовала опорной величине μр1 потенциального трения, меньшей или равной 0,3.
3. Способ по п.1 или 2, при котором первую базовую кривую «трение контактного взаимодействия/кинематическая величина» выбирают так, чтобы она соответствовала опорной величине μр1 потенциального трения, равной по меньшей мере 0,15.
4. Способ по любому из пп.1-3, при котором вторую базовую кривую «трение контактного взаимодействия/кинематическая величина» выбирают так, чтобы она соответствовала опорной величине μр2 потенциального трения, находящейся в диапазоне между 0,35 и 0,5.
5. Способ по любому из пп.1-4, при котором первая пороговая величина трения контактного взаимодействия меньше первой опорной величины μр1 потенциального трения.
6. Способ по любому из пп.1-5, при котором первую базовую кривую выбирают так, чтобы первая пороговая величина трения контактного взаимодействия находилась в диапазоне между 0,05 и 0,2.
7. Способ по любому из пп.1-6, при котором вторая пороговая величина трения контактного взаимодействия больше первой опорной величины μр1 потенциального трения и меньше второй опорной величины μр2 потенциального трения.
8. Способ по любому из пп.1-7, при котором вторую базовую кривую выбирают так, чтобы вторая пороговая величина трения контактного взаимодействия находилась в диапазоне между 0,25 и 0,4.
9. Способ по любому из пп.1-8, при котором предусматривают как первое и второе пороговые значения кинематической величины, так и первую и вторую пороговые величины трения контактного взаимодействия и, если текущее значение кинематической величины меньше первого порогового значения кинематической величины:
- если трение μ контактного взаимодействия находится в диапазоне между первой и второй пороговыми величинами трения контактного взаимодействия, определяют, что величина потенциального трения превышает первую опорную величину μр1 потенциального трения;
- если трение μ контактного взаимодействия превышает вторую пороговую величину трения контактного взаимодействия, определяют, что величина потенциального трения превышает вторую опорную величину μр2 потенциального трения.
10. Способ по п.9, при котором, если текущее значение кинематической величины находится в диапазоне между первым и вторым пороговыми значениями кинематической величины и если трение μ контактного взаимодействия превышает указанную вторую пороговую величину трения контактного взаимодействия, определяют, что величина потенциального трения превышает вторую опорную величину μр2 потенциального трения.
11. Способ по любому из пп.1-8, при котором получают как первое и второе пороговые значения кинематической величины, так и первую и вторую пороговые величины трения контактного взаимодействия и, если трение контактного взаимодействия меньше первой пороговой величины трения контактного взаимодействия:
- если текущее значение кинематической величины превышает первое пороговое значение кинематической величины, определяют, что величина потенциального трения равна первой опорной величине μр1 или меньше нее.
12. Способ по п.11, при котором, если трение контактного взаимодействия находится в диапазоне между первой и второй пороговыми величинами трения контактного взаимодействия и если текущее значение кинематической величины превышает второе пороговое значение кинематической величины и рабочая точка находится выше первой базовой кривой, определяют, что величина потенциального трения находится в диапазоне между первой опорной величиной μр1 и второй опорной величиной μр2 потенциального трения.
13. Способ по любому из пп.1-12, при котором получают как первое и второе пороговые значения кинематической величины, так и первую и вторую пороговые величины трения контактного взаимодействия и, если трение контактного взаимодействия меньше первой пороговой величины трения контактного взаимодействия и если текущее значение кинематической величины меньше первого порогового значения кинематической величины, определяют, что оценка потенциального трения не применима.
14. Способ по любому из пп.1-13, при котором кинематическая величина представляет собой угол α увода шины, а трение μ контактного взаимодействия представляет собой трение Fy/Fz контактного взаимодействия в боковом направлении.
15. Способ по п.14, при котором первую базовую кривую выбирают так, чтобы первое пороговое значение кинематической величины соответствовало углу увода, находящемуся в диапазоне между 0,5° и 1,2°.
16. Способ по п.14 или 15, при котором вторую базовую кривую выбирают так, чтобы второе пороговое значение кинематической величины соответствовало углу увода, находящемуся в диапазоне между 1,2° и 2,5°.
17. Способ по любому из пп.1-13, при котором кинематическая величина представляет собой продольное проскальзывание ε шины, а трение μ контактного взаимодействия представляет собой трение Fx/Fz контактного взаимодействия в продольном направлении.
18. Способ по п.17, при котором первую базовую кривую выбирают так, чтобы первое пороговое значение кинематической величины соответствовало проскальзыванию, равному по меньшей мере 0,5%.
19. Способ по п.17 или 18, при котором вторую базовую кривую выбирают так, чтобы второе пороговое значение кинематической величины соответствовало проскальзыванию, равному по меньшей мере 0,9%.
20. Способ по любому из пп.14-16, при котором рабочую точку определяют исходя из величин трения Fy/Fz контактного взаимодействия в боковом направлении и угла α увода, когда текущая боковая составляющая ускорения шины больше по абсолютной величине, чем заданное значение боковой составляющей ускорения.
21. Способ по любому из пп.17-19, при котором рабочую точку определяют исходя из величин трения Fx/Fz контактного взаимодействия в продольном направлении и продольного проскальзывания ε шины, когда текущая боковая составляющая ускорения шины меньше по абсолютной величине, чем заданное значение боковой составляющей ускорения, и продольная составляющая ускорения шины больше по абсолютной величине, чем заданное значение продольной составляющей ускорения.
22. Способ по любому из пп.1-21, при котором обеспечивают вращение шины на поверхности качения при переходном режиме качения.
23. Система (100) для оценки потенциального трения между шиной и поверхностью качения, содержащая:
память (130), в которой хранятся первая и вторая базовые кривые «трение контактного взаимодействия/кинематическая величина», соответственно соответствующие первой и второй опорным величинам μр1, μр2 потенциального трения, где μр2 > μр1, и первое и второе пороговые значения кинематической величины или первая и вторая пороговые величины трения контактного взаимодействия, при этом первое пороговое значение соответствует значению кинематической величины или соответственно величине трения контактного взаимодействия, при котором первая базовая кривая, по существу, отличима от второй базовой кривой, и второе пороговое значение соответствует значению кинематической величины или соответственно величине трения контактного взаимодействия, при котором вторая базовая кривая, по существу, отличима от по меньшей мере одной третьей базовой кривой, соответствующей третьей опорной величине μр3 потенциального трения, где μр3>μр2;
по меньшей мере один модуль (110, 120, 140, 150) обработки, выполненный с возможностью:
- определения трения μ контактного взаимодействия между шиной и поверхностью качения;
- определения текущего значения кинематической величины между шиной и поверхностью качения;
- определения текущей рабочей точки, задаваемой трением μ контактного взаимодействия и текущим значением кинематической величины;
- сравнения текущего значения кинематической величины с первым и вторым пороговыми значениями кинематической величины или соответственно трения μ контактного взаимодействия с первой и второй пороговыми величинами трения контактного взаимодействия;
- если текущее значение кинематической величины или трения μ контактного взаимодействия находится в диапазоне между соответствующими первым и вторым пороговыми значениями и рабочая точка находится выше первой базовой кривой, определения того, что величина потенциального трения превышает первую опорную величину μр1;
- если текущее значение кинематической величины или трения μ контактного взаимодействия превышает соответствующее второе пороговое значение и рабочая точка находится выше второй базовой кривой, определения того, что величина потенциального трения превышает вторую опорную величину μр2 потенциального трения;
- если текущее значение кинематической величины или трения μ контактного взаимодействия превышает соответствующее второе пороговое значение и рабочая точка находится между первой и второй базовыми кривыми, определения того, что величина потенциального трения находится в диапазоне между первой опорной величиной μр1 потенциального трения и второй опорной величиной μр2 потенциального трения;
- если текущая кинематическая величина или трение μ контактного взаимодействия превышает соответствующее первое пороговое значение и рабочая точка не находится выше первой базовой кривой, определения того, что величина потенциального трения равна первой опорной величине μр1 или меньше нее.
| US 2002111752 A1, 15.08.2002 | |||
| US 2011166761 A1, 07.07.2011 | |||
| DE 102010048927 A1, 28.04.2011. |

