Изобретение относится к области приборостроения и может быть использовано при построении одноосных и трехосных измерителей параметров движения - угловых скоростей и линейных ускорений для инерциальных навигационных систем и пилотажных систем управления подвижных объектов.
Одним из главных источников погрешности измерений гироскопических датчиков - гироскопов и акселерометров является температурная зависимость систематических составляющих дрейфа - нулевых сигналов и масштабных коэффициентов.
Существует два пути устранения этой зависимости - температурная стабилизация и алгоритмическая компенсация [1].
Температурная стабилизация требует дополнительных энергозатрат, увеличения габаритов и массы измерителя параметров движения. Однако и этот способ не устраняет нестабильность систематик, возникающих в датчиках угловых скоростей и линейных ускорений от пуска к пуску [2].
Менее энергозатратным и с большими возможностями совершенствования является способ алгоритмическая компенсация температурной зависимости систематических составляющих дрейфа гироскопических датчиков [3], который является прототипом заявленного изобретения. В этом способе в заводских условиях в процессе отладки гироскопа определяют значения систематических составляющих в виде нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне. Зависимость нулевого сигнала и масштабного коэффициента от температуры аппроксимируют полиномом:
- для нулевого сигнала:

- для масштабного коэффициента:

где: B0, B1, B2, В3 - коэффициенты полинома, аппроксимирующего температурную зависимость нулевого сигнала U0(T); S1, S2, S3 - коэффициенты полинома, аппроксимирующего температурную зависимость масштабного коэффициента SFK(Т); Т - текущая температура.
Коэффициенты полиномов, описывающих температурную зависимость нулевого сигнала и масштабного коэффициента, записываются в микроконтроллер чувствительного элемента. В процессе эксплуатации прибора для текущих значений температуры по алгоритмам (1), (2) рассчитываются значения нулевых сигналов и масштабных коэффициентов. Расчет измеряемой угловой скорости Ω с учетом зависимости нулевого сигнала U0(Т) и масштабного коэффициента SFK(T) от температуры осуществляется в микроконтроллере чувствительного элемента по формуле:
где: U(Ω) - выходной сигнал гироскопа в аналоговом виде.
Основным недостатком алгоритмической компенсации, реализованной в прототипе, является отсутствие учета нестабильности систематических составляющих дрейфа гироскопа от пуска к пуску. Как показывают результаты экспериментальных исследований, нестабильность систематических составляющих от пуска к пуску имеет существенную величину и может превышать нестабильность систематических составляющих в запуске.
Заявленное изобретение решает задачу снижения величины, нестабильности систематических составляющих, при этом достигается такой технический результат, как повышения точностных характеристик гироскопических датчиков.
Заявленный технический результат достигается способом компенсации температурной зависимости систематических составляющих дрейфа гироскопических датчиков, включающим измерение в заводских условиях, в процессе отладки чувствительных элементов, значения систематических составляющих в виде нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне, описание кусочно-линейной или полиномной аппроксимацией зависимости нулевого сигнала и масштабного коэффициента от температуры, при этом измерение систематических составляющих в виде нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне осуществляют в процессе по меньшей мере двух запусков чувствительных элементов, рассчитывают средние значения нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне, полученных в запусках, по полученным средним значениям определяют коэффициенты кусочно-линейной или полиномной аппроксимации температурной зависимости, затем эти коэффициенты записывают в микроконтроллер для возможности осуществления алгоритмической компенсации температурной зависимости нулевых сигналов и масштабных коэффициентов в процессе эксплуатации.
В процессе запуска чувствительного элемента определяется значение нулевого сигнала при температуре запуска, рассчитывается разница между измеренным значением нулевого сигнала и его значением, рассчитанным по коэффициентам алгоритмической компенсации, и в дальнейшем, при изменении температуры, производится корректировка рассчитанных значений нулевого сигнала по коэффициентам алгоритмической компенсации с учетом разницы между измеренными и рассчитанными значениями нулевого сигнала в запуске.
Поставленная задача решается путем учета нестабильности систематических составляющих дрейфа гироскопических датчиков от пуска к пуску следующим образом.
В заводских условиях в процессе отладки чувствительных элементов осуществляется измерение систематических составляющих в виде нулевых сигналов Uoi(Тб) и масштабных коэффициентов kмi(Тб) при фиксированных значениях ряда температур Тб в рабочем диапазоне в процессе многократных (n), как минимум двух, запусков чувствительных элементов, рассчитываются средние значения нулевых сигналов
и масштабных коэффициентов
а по ним определяются коэффициенты кусочно-линейной kT(qj), ktM(qj) или полиномной k0, k1, k2…km; B0, B1, B2…Bm аппроксимации их температурной зависимости, и эти коэффициенты вводятся в микроконтроллер чувствительных элементов, с помощью которых в процессе эксплуатации осуществляется алгоритмическая компенсация температурной зависимости:
полиномом m-ного порядка:
нулевых сигналов

масштабных коэффициентов

или кусочно-линейной аппроксимацией:
нулевых сигналов

масштабных коэффициентов

где: В0, В1, В2…Bm - коэффициенты полинома, аппроксимирующего температурную зависимость нулевого сигнала; Тб - базовые значения температур (Т1, Т2, Т3, Т4 и так далее), при которых производилось измерение нулевых сигналов и масштабных коэффициентов в заводских условиях; Т - текущие рабочие значения температуры, при которых определяются значения нулевых сигналов и масштабных коэффициентов в эксплуатационных условиях; k0, k1, k2…km - коэффициенты полинома, аппроксимирующего температурную зависимость масштабных коэффициентов; kTo(qj) и kTм(qj) - коэффициенты линейной температурной аппроксимации нулевых сигналов и масштабных коэффициентов на участках q между их базовыми значениями:

где: U0(Тб), U0(Тб+1), kм(Тб), kм(Тб+1) - нулевые сигналы и масштабные коэффициенты при базовых температурах в начале (Тб) и в конце (Тб+1) линейного участка qj, a j - номер интервала.
Кроме того, в процессе запуска чувствительного элемента определяется значение нулевого сигнала при температуре запуска, рассчитывается разница ΔUоп между измеренным значением нулевого сигнала U0(Тп) и его значением, рассчитанным по коэффициентам алгоритмической компенсации Uop(Тп) по формулам 6,8.

и в дальнейшем, при изменении температуры, производится корректировка рассчитанных значений нулевого сигнала по коэффициентам алгоритмической компенсации с учетом разницы между измеренными и рассчитанными значениями нулевого сигнала в запуске:
при аппроксимации полиномом m-ного порядка:

при кусочно-линейной аппроксимации:

Сущность изобретения поясняется графиками:
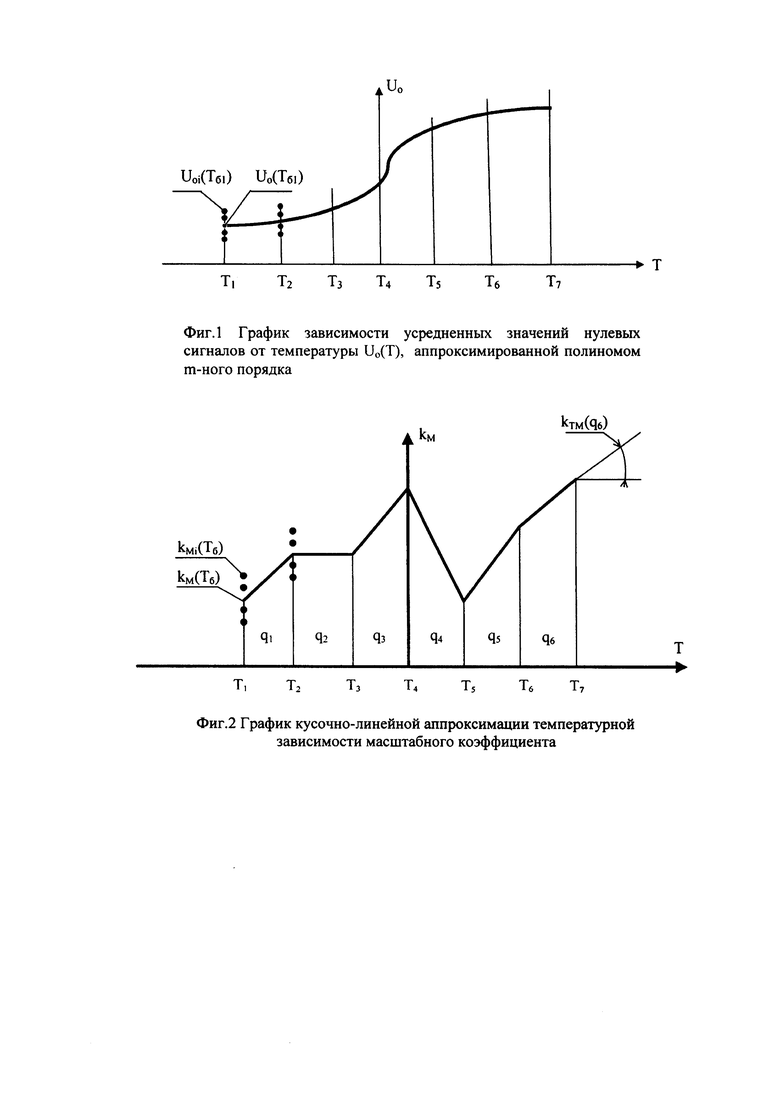
Фиг. 1 - график температурной зависимости усредненных значений нулевых сигналов Uo(T), аппроксимированной полиномом m-ного порядка;
Фиг. 2 - график температурной зависимости усредненных значений масштабного коэффициента kм(Т) при кусочно-линейной аппроксимации;
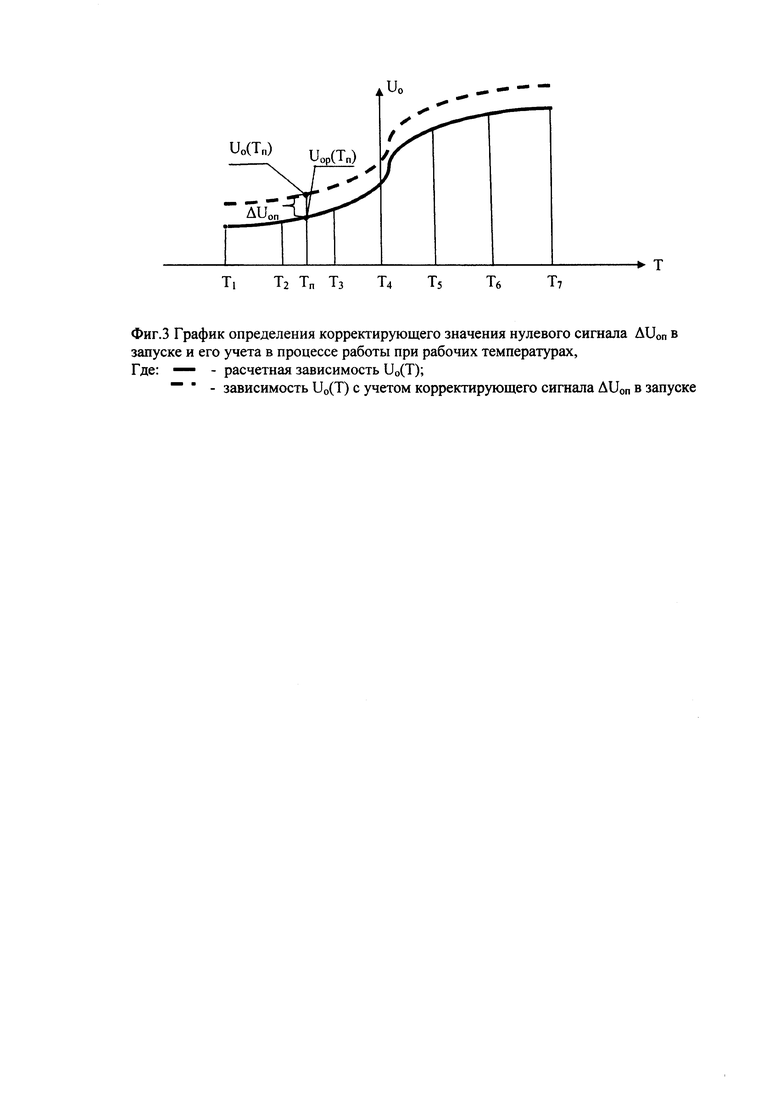
Фиг. 3 - график определения корректирующего значения нулевого сигнала ΔUoп в запуске и его учета в процессе работы при рабочих температурах.
Реализуется изобретение следующим образом.
В процессе калибровки прибора в заводских условиях осуществляется измерение нулевых сигналов Uoi(Тб) фиг. 1 и масштабных коэффициентов kмi(Тб) фиг. 2 для ряда фиксированных значений Т1, Т2, Т3, Т4, Т5, Т6, Т7 базовых температур Тб в нескольких запусках (на фиг. 1, 2, в качестве примера, для четырех запусков). По формулам 4, 5 находятся средние значения нулевых сигналов U0(Тб) и масштабных коэффициентов kм(Тб) для фиксированных значений базовых температур. Используя полученные данные, температурная зависимость нулевых сигналов и масштабных коэффициентов может быть описана либо полиномом m-ной степени по формулам 6, 7, либо с помощью кусочно-линейной аппроксимации по формулам 8, 9.
При аппроксимации температурной зависимости полиномом в память микроконтроллера чувствительного элемента записываются коэффициенты полинома В0, В1, В2, В3…Bm, для алгоритмической компенсации нулевого сигнала и коэффициенты k0, k1, k2, k3…km - для алгоритмической: компенсации масштабного коэффициента в процессе эксплуатации гироскопических датчиков.
При кусочно-линейной аппроксимации в память микроконтроллера записываются значения базовых температур (Тб) и нулевых сигналов Uo(Тб) масштабных коэффициентов kм(Тб), рассчитанных по формулам 4, 5 при этих базовых температурах. Кроме того, в память микропроцессора записываются еще и коэффициенты температурной зависимости нулевого сигнала kTo(qj) и масштабного коэффициента kTм(qj) (фиг. 2) на линейных участках q между базовыми температурами, рассчитанные в заводских условиях по формулам 10.
В процессе эксплуатации гироскопических датчиков алгоритмическая компенсация температурной зависимости масштабных коэффициентов осуществляется по алгоритмам 7 или 9, а нулевых сигналов - по алгоритмам 6 или 8 в зависимости от принятого способа аппроксимации температурной зависимости.
Для дополнительной компенсации нулевого сигнала в процессе эксплуатации гироскопических датчиков в запуске определяется разница ΔUоп между измеренным значением нулевого сигнала Uo(Тп) и его значением, рассчитанным по коэффициентам алгоритмической компенсации Uop(Тп) - по формулам 6, 8 - фиг. 3. Указанная поправка ΔUоп определяется вновь при каждом новом запуске гироскопического датчика.
После запуска в процессе эксплуатации рассчитанная поправка учитывается при алгоритмической компенсации температурной зависимости нулевого сигнала с помощью формул 12, 13.
Литература
1. Некрасов Я.А., Микромеханический гироскоп, RU 2535248 С1.
2. Ефремов М.В., Губанов А.Г., Романов А.В., Карпов М.Н. Круглов С.А. Волоконно-оптический гироскоп с термокомпенсированным цифровым выходом, RU 2448325.
3. В. Логозинский, И. Сафтулин, В. Соломатин. Волоконно-оптический датчик вращения с цифровым откорректированным выходом / VI Санкт-Петербургская международная конференция по интегрированным навигационным системам, 28-30 мая, 2001 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| СПОСОБ КОМПЕНСАЦИИ СИСТЕМАТИЧЕСКОЙ СОСТАВЛЯЮЩЕЙ ДРЕЙФА НУЛЕВОГО СИГНАЛА ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2019 |
|
RU2695439C1 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |
| Способ калибровки погрешностей инерциального измерительного блока на базе лазерных гироскопов с использованием динамического стенда | 2021 |
|
RU2803878C2 |
| СПОСОБ ТЕПЛОВОГО КОНТРОЛЯ СОСТОЯНИЯ БУКСОВЫХ ПОДШИПНИКОВ В ПРОЦЕССЕ ДВИЖЕНИЯ РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 2012 |
|
RU2518942C1 |
| Акселерометр компенсационного типа | 2020 |
|
RU2741277C1 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОРРЕКТИРОВКИ ПЕРЕДАЮЩЕЙ ФУНКЦИИ ДАТЧИКА ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2003 |
|
RU2247325C2 |
| Способ компенсации температурных погрешностей инерциального измерительного блока систем ориентации и навигации | 2020 |
|
RU2758339C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА | 2014 |
|
RU2560742C1 |
Изобретение относится к области приборостроения и может быть использовано при построении одноосных и трехосных измерителей параметров движения - угловых скоростей и линейных ускорений для инерциальных навигационных систем и пилотажных систем управления подвижных объектов. Заявлен способ компенсации температурной зависимости систематических составляющих дрейфа гироскопических датчиков, включающий измерение в заводских условиях, в процессе отладки чувствительных элементов, значения систематических составляющих в виде нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне, описание кусочно-линейной или полиномной аппроксимацией зависимости нулевого сигнала и масштабного коэффициента от температуры. При этом измерение систематических составляющих в виде нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне осуществляют в процессе по меньшей мере двух запусков чувствительных элементов. Рассчитывают средние значения нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне, полученных в запусках. По полученным средним значениям определяют коэффициенты кусочно-линейной или полиномной аппроксимации температурной зависимости. Затем эти коэффициенты записывают в микроконтроллер для возможности осуществления алгоритмической компенсации температурной зависимости нулевых сигналов и масштабных коэффициентов в процессе эксплуатации. Технический результат - повышение точностных характеристик гироскопических датчиков. 1 з.п. ф-лы, 3 ил.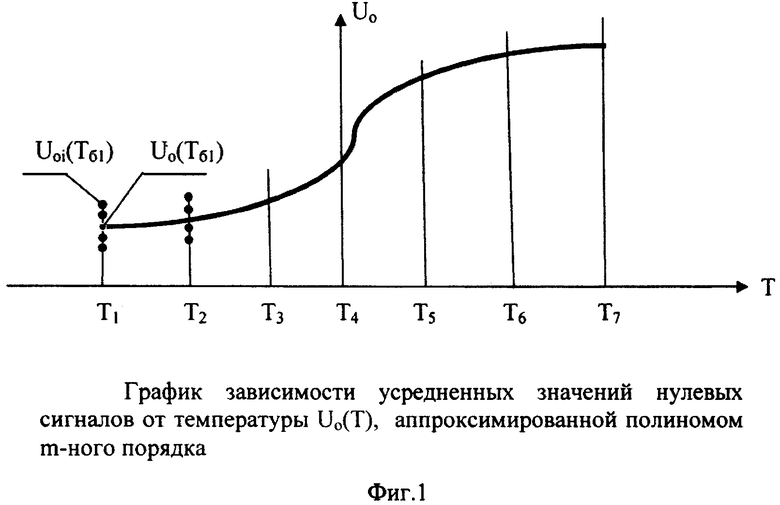
1. Способ компенсации температурной зависимости систематических составляющих дрейфа гироскопических датчиков, включающий измерение в заводских условиях, в процессе отладки чувствительных элементов, значения систематических составляющих в виде нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне, описание кусочно-линейной или полиномной аппроксимацией зависимости нулевого сигнала и масштабного коэффициента от температуры, отличающийся тем, что измерение систематических составляющих в виде нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне осуществляют в процессе по меньшей мере двух запусков чувствительных элементов, рассчитывают средние значения нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне, полученных в этих запусках, по полученным средним значениям определяют коэффициенты кусочно-линейной или полиномной аппроксимации температурной зависимости, затем эти коэффициенты записывают в микроконтроллер для возможности осуществления алгоритмической компенсации температурной зависимости нулевых сигналов и масштабных коэффициентов в процессе эксплуатации.
2. Способ по 1, отличающийся тем, что в процессе запуска чувствительного элемента определяется значение нулевого сигнала при температуре запуска, рассчитывается разница между измеренным значением нулевого сигнала и его значением, рассчитанным по коэффициентам алгоритмической компенсации, и в дальнейшем, при изменении температуры, производится корректировка рассчитанных значений нулевого сигнала по коэффициентам алгоритмической компенсации с учетом разницы между измеренными и рассчитанными значениями нулевого сигнала в запуске.
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |

