ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
В соответствии с §119(а) раздела 35 свода законов США приоритет данной заявки заявляется по заявке на патент Кореи №10-2006-122882, поданной 6 декабря 2005 года в Корейское Бюро по Интеллектуальной Собственности, описание которой целиком включено в данный документ посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область техники
Данное изобретение, в общем, относится к роботизированной системе чистки. Более конкретно данное изобретение относится к роботизированной системе чистки, в которой робот-пылесос может убирать очищаемую поверхность во время самостоятельного перемещения.
Описание уровня техники
В общем случае робот-пылесос собирает посторонние вещества, например пыль, грязь или тому подобное, с очищаемой поверхности во время самостоятельного перемещения в разных направлениях в пределах очищаемой площади без управления пользователем, автоматически убирая, таким образом, очищаемую площадь.
Подобный робот-пылесос содержит датчик расстояния или блок фотосъемки, так что он убирает очищаемую площадь с подтверждением, находится ли перед ним препятствие, или с подтверждением расстояния от него до какого-либо устройства или предмета, стены или подобного препятствия, расположенного на очищаемой площади, и таким образом, передвигается, избегая столкновения или обходя препятствие.
Вышеописанный робот-пылесос выполнен с левым приводным колесом, правым приводным колесом и ведомым колесом, которые установлены на нижней части корпуса пылесоса. Эти колеса соответственно присоединены к приводным двигателям, которые приводят их во вращение. Управление приводными двигателями осуществляется блоком управления, так что корпус пылесоса может изменять направление перемещения.
Кроме того, в нижней части корпуса пылесоса расположено всасывающее отверстие, которое втягивает посторонние вещества, например, пыль, грязь и тому подобное, с очищаемой поверхности. Всасывающее усилие, которое прикладывается к всасывающему отверстию, обеспечивается двигателем, создающим всасывание, установленным в корпусе пылесоса. Всасывающее отверстие подсоединено к отдельному пылесборнику, выполненному в корпусе пылесоса. Соответственно, посторонние вещества, содержащиеся во втягиваемом воздухе, накапливаются в пылесборнике, а затем удаляются из него. Вышеописанный робот-пылесос убирает очищаемую поверхность или во время передвижения по запрограммированному рабочему маршруту, или воспринимает схему перемещения, выполненную на очищаемой поверхности, и совершает передвижение вдоль нее. При выполнении роботом-пылесосом работы по уборке во время самостоятельного перемещения по всем направлениям, как изложено выше, блок управления проверяет величину электрического заряда, оставшегося в аккумуляторе, и подтверждает, достаточна ли эта величина. Если принято решение о необходимости зарядки аккумулятора, робот-пылесос сообщается с зарядной станцией, расположенной в заданном месте, для поиска положения зарядной станции и перемещается к искомому положению. Например, блок управления совершает поиск положения зарядной станции во время передачи-приема сигналов к зарядной станции и от нее и приводит в действие приводные двигатели для перемещения корпуса пылесоса к зарядной станции. Соединительные клеммы, выполненные на роботе-пылесосе, соединяются с зарядными клеммами, выполненными на зарядной станции. При соединении соединительных клемм и зарядных клемм друг с другом, как изложено выше, блок управления выполняет режим зарядки до полной зарядки аккумулятора электроэнергией. В это время робот-пылесос находится в режиме ожидания с остановкой других режимов, например, режима уборки, режима приведения во вращение колес и подобных им.
Кроме того, в корейском патенте №635828 приведено описание робота-пылесоса, работа которого заключается в задании очищаемой площади «участком площади» или «всем домом», а затем выполнении работы по уборке в соответствии с заданной площадью. В этом случае робот-пылесос определяет высоту порога, который образует границу между помещениями, с тем чтобы преодолеть порог или передвигаться дальше без его преодоления.
Однако робот-пылесос обычно поставляется из магазина с установленным стандартным значением высоты порога (20 мм). Следовательно, если высота порога дома пользователя, обусловленная конструкцией его дома, имеет величину (например, 30 мм), отличающуюся от стандартной, заданной в роботе-пылесосе, то когда робот-пылесос неожиданно сталкивается с порогом в заданном режиме уборки площади «всего дома», он не определяет выявленный порог как порог, а воспринимает его как опасное состояние или подобное ему. В результате возникает проблема, которая заключается в том, что он не преодолевает порог, и в силу этого работа по уборке в соответствии с заданной площадью не выполняется равномерно.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью данного изобретения является устранение по меньшей мере вышеуказанных проблем и/или недостатков и создание по меньшей мере преимуществ, рассмотренных в дальнейшем. Соответственно, целью данного изобретения является создание роботизированной системы чистки, которая обеспечивает беспрепятственное преодоление порогов, независимо от их высоты, которая может изменяться вследствие различных конструкций домов.
В соответствии с одним аспектом примерного варианта выполнения данного изобретения предлагается роботизированная система чистки, содержащая робот-пылесос, предназначенный для выполнения работы по уборке во время автоматического перемещения по очищаемой поверхности, и зарядную станцию, выполненную с возможностью соединения с роботом-пылесосом для зарядки электроэнергией аккумулятора, установленного в роботе-пылесосе. Зарядная станция содержит задающий переключатель для избирательного введения значения высоты порога. Блок управления робота-пылесоса принимает от зарядной станции значение высоты порога, введенной в зарядной станции, сохраняет полученное значение высоты порога в запоминающем устройстве, сравнивает значение высоты порога, выявленное датчиком высоты робота-пылесоса во время его перемещения, с сохраненным в запоминающем устройстве значением, управляет роботом-пылесосом с обеспечением его перемещения во время преодоления порога, если выявленное значение высоты порога равно или меньше сохраненного значения, и управляет роботом-пылесосом с обеспечением его перемещения после заднего хода и поворота, если выявленное значение высоты порога превышает сохраненное значение.
Задающий переключатель может использовать переключатель в корпусе с двухрядным расположением выводов и поворотный переключатель.
В соответствии с другим аспектом примерного варианта выполнения данного изобретения предлагается роботизированная система чистки, содержащая робот-пылесос, предназначенный для выполнения работы по уборке во время автоматического перемещения по очищаемой поверхности, и зарядную станцию, выполненную с возможностью соединения с роботом-пылесосом для зарядки электроэнергией аккумулятора, установленного в роботе-пылесосе. Робот-пылесос содержит задающий переключатель для избирательного введения значения высоты порога. Блок управления робота-пылесоса сохраняет значение высоты порога, введенной посредством задающего переключателя, в запоминающем устройстве, сравнивает значение высоты порога, выявленное датчиком высоты робота-пылесоса во время его перемещения, с сохраненным в запоминающем устройстве значением, управляет роботом-пылесосом с обеспечением его перемещения во время преодоления порога, если выявленное значение высоты порога равно или меньше сохраненного значения, и управляет роботом-пылесосом с обеспечением его перемещения после заднего хода и поворота, если выявленное значение высоты порога превышает сохраненное значение.
В этом случае задающий переключатель может использовать переключатель в корпусе с двухрядным расположением выводов (переключатель в корпусе DIP) и поворотный переключатель.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанный аспект и другие характеристики данного изобретения будут более очевидны из подробного описания примерных вариантов выполнения данного изобретения со ссылкой на прилагаемые чертежи, на которых:
фиг.1 изображает схематическую структурную схему, иллюстрирующую роботизированную систему чистки в соответствии с первым примерным вариантом выполнения данного изобретения;
фиг.2 изображает схематический вид робота-пылесоса непосредственно перед преодолением им порога;
фиг.3 изображает блок-схему, иллюстрирующую способ управления роботизированной системой чистки в процессе зарядки или перемещения робота-пылесоса в соответствии с первым примерным вариантом выполнения данного изобретения;
фиг.4 изображает схематическую структурную схему, иллюстрирующую роботизированную систему чистки в соответствии со вторым примерным вариантом выполнения данного изобретения; и
фиг.5 изображает блок-схему, иллюстрирующую способ управления роботизированной системой чистки в процессе зарядки или перемещения робота-пылесоса в соответствии со вторым примерным вариантом выполнения данного изобретения.
Следует понимать, что на данных чертежах одинаковые номера позиций относятся к аналогичным деталям, характеристикам и конструкциям.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Ниже приведено подробное описание роботизированной системы чистки и способа управления этой системой в соответствии с примерными вариантами выполнения данного изобретения со ссылкой на сопроводительные чертежи. Фиг.1 изображает схематическую структурную схему, иллюстрирующую роботизированную систему чистки в соответствии с первым примерным вариантом выполнения данного изобретения, и фиг.2 изображает схематический вид робота-пылесоса непосредственно перед преодолением им порога.
Прежде всего приведено описание робота-пылесоса 10 и зарядной станции 20 роботизированной системы чистки в соответствии с первым примерным вариантом выполнения данного изобретения со ссылкой на фиг.1.
Робот-пылесос 10 имеет соединительные клеммы 11, которые соответствуют зарядным клеммам (не показаны) зарядной станции 20. Соединительные клеммы 11 выполнены так, что пара соединительных клемм выведена наружу. Кроме того, робот-пылесос 10 содержит запоминающее устройство 12, аккумулятор 13, датчик 14 высоты, датчик 15 препятствий, блок 16 приведения в действие пылесборника, блок 17 передачи-приема, блок 18 приведения колес во вращение и блок 19 управления.
Запоминающее устройство 12 обычно состоит из постоянного запоминающего устройства (ПЗУ) и оперативного запоминающего устройства (ОЗУ). Запоминающее устройство 12 сохраняет различные данные, например, время уборки, очищаемую площадь, схему уборки и т.д., которые необходимы, когда блок 30 управления автоматически осуществляет управление роботом-пылесосом 10. Кроме того, запоминающее устройство 12 сохраняет значения высоты порогов в доме пользователя, которые передаются от зарядной станции 20. Поскольку значение высоты может быть изменено, оно предпочтительно сохраняется в ПЗУ.
Аккумулятор 13, обеспечивающий электроэнергию для приведения в действие, заряжается определенным количеством электричества. Соответственно, блок 19 управления иногда определяет количество электричества, остающееся в аккумуляторе 13, принимает решение, надо ли зарядить аккумулятор 13, а затем осуществляет управление роботом-пылесосом 10 для выполнения заданного режима зарядки.
Как проиллюстрировано на фиг.2, датчик 14 высоты установлен на передней нижней части робота-пылесоса 10 и обращен к очищаемой поверхности 30. Датчик 14 измеряет расстояние от поверхности 30. Кроме того, датчик 14 может выявлять определенные метки, выполненные на поверхности 30. Соответственно, датчик 14 используется для подтверждения очищаемой площади или маршрута перемещения. В качестве датчика 14 высоты можно использовать датчик, излучающий и принимающий свет.
Датчик 15 препятствий установлен на боковой стороне робота-пылесоса 10, предпочтительнее на передней стороне, на которой размещены соединительные клеммы 11. Датчик 15 используется для выявления препятствия или стены, расположенной в направлении перемещения или перед роботом-пылесосом 10, и для определения расстояния от препятствия или стены. В качестве датчика 15 можно использовать датчик, излучающий и принимающий свет.
Воспринимаемые датчиками 14 и 15 сигналы, как изложено выше, передаются к блоку 19 управления, который получает информацию о состоянии, положении и тому подобному робота-пылесоса 10 посредством сравнения переданных сигналов с отсчетными данными, хранящимися в запоминающем устройстве 12, и выполняет управление роботом-пылесосом 10 с использованием полученной информации.
Блок 16, приводящий в действие пылесборник, создает всасывающее усилие, обеспечивающее уборку очищаемой поверхности 30 на убираемой площади. Блок 16 может содержать двигатель для пылеулавливания.
Блок 17 передачи-приема используется для поиска положения проведения зарядки посредством сообщения с блоком передачи-приема (не показан), установленным в зарядной станции 20. Дополнительно блок 17 обеспечивает передачу и прием сигналов к пульту дистанционного управления, который управляется пользователем, и от него. Таким образом, управление роботом-пылесосом 10 может осуществляться дистанционно.
Блок 18 приведения колес во вращение, который избирательно приводит во вращение левое и правое приводные колеса 10а, установленные на нижней части робота-пылесоса 10, приводится в действие под управлением блока 19 управления. Блок 18 может быть выполнен в виде шаговых двигателей, подсоединенных, соответственно, к левому и правому приводным колесам 10а. Номером 10b позиции на фиг.2 показано дополнительное колесо, к которому движущая сила не передается.
Помимо зарядных клемм и блока приема-передачи, как изложено выше, в зарядной станции 20 имеется задающий переключатель 21, который может выборочно задавать значение высоты порога путем ввода пользователем. Переключатель 21 может быть переключателем в корпусе с двухрядным расположением выводов (переключатель DIP). Пользователь может вводить различные значения высот порогов (например, 10 мм, 20 мм, 25 мм, 30 мм и т.д.), комбинируя множество рабочих контактов, выполненных на переключателе DIP. Как вариант, для более точного и удобного ввода значений высот порогов можно использовать поворотный переключатель, который переключает соединение цепей посредством поворота. Соответственно, если при поставке пылесоса в запоминающем устройстве 12 робота-пылесоса 10 значение высоты порога было введено как 20 мм, а величина высоты порогов в доме пользователя составляет 25 мм, пользователь может заново свободно ввести соответствующее значение высоты порога переключателем 21. Кроме того, при переезде пользователя в новый дом, в котором пороги имеют другую высоту, он может просто заново ввести соответствующее значение высоты порогов задающим переключателем 21. В результате робот-пылесос 10 может перемещаться в разных направлениях с плавным преодолением порогов 31.
Ниже, со ссылкой на фиг.3, приведено описание способа управления роботизированной системой чистки вышеприведенной конструкции в соответствии с первым примерным вариантом выполнения данного изобретения. Фиг.3 изображает блок-схему, иллюстрирующую способ управления роботом-пылесосом в процессе зарядки или перемещения в соответствии с первым примерным вариантом выполнения данного изобретения.
Прежде всего, пользователь стыкует робот-пылесос 10 с зарядной станцией 20 с обеспечением электрического подсоединения к ней, а затем вводит значение высоты порога задающим переключателем 21 зарядной станции 20 (S1). Введенное вышеописанным способом значение высоты порога передается к запоминающему устройству 12 робота-пылесоса 10 (S2). Затем блок 19 управления сравнивает введенное значение высоты порога с предварительно сохраненным в запоминающем устройстве 12 робота-пылесоса 10 значением высоты порога (S3). Если предварительно сохраненное значение и введенное значение не совпадают, блок 19 стирает из запоминающего устройства 12 предварительно сохраненное значение и сохраняет в нем введенное значение (S4).
С другой стороны, если робот-пылесос 10 находится в режиме зарядки (S5), то он заряжает аккумулятор 13 электроэнергией (S6). После завершения зарядки аккумулятора 13 робот-пылесос 10 переключается в режим перемещения с отделением от зарядной станции 20 и выполнением работы по уборке во время перемещения по очищаемой поверхности (S7). Если во время перемещения робот-пылесос 10 сталкивается с порогом 31, он продолжает перемещаться до тех пор, пока его передняя поверхность не ляжет поперек порога 31. Затем блок 19 управления сравнивает значение высоты от очищаемой поверхности 30, которая непрерывно определяется датчиком 14 высоты, с сохраненным в запоминающем устройстве 12 значением высоты порога (S8) и осуществляет управление роботом-пылесосом 10 для выполнения различных операций в зависимости от результата сравнения. А именно, если расстояние h (см. фиг.2) между датчиком 14 высоты за порогом 31 и очищаемой поверхностью 30, определяемое датчиком 14, равно или меньше значения высоты порога, сохраненного в запоминающем устройстве 12, блок 19 управления принимает решение о преодолении роботом-пылесосом 10 порога 31 и управляет блоком 18 приведения колес во вращение, обеспечивающим движение вперед, так что робот-пылесос 10 продолжает двигаться в направлении следования и, таким образом, полностью преодолевает порог 31 (S9). С другой стороны, если расстояние h превышает значение высоты порога, сохраненного в запоминающем устройстве 12, то блок 19 управления принимает решение об опасном положении робота-пылесоса 10 и управляет блоком 18 для движения задним ходом, так что робот-пылесос двигается в направлении, противоположном направлению следования, а затем управляет блоком 18, так что робот-пылесос 10 перемещается дальше после совершения поворота на некоторый угол (S10).
Когда робот-пылесос 10 выполняет работу по уборке во время передвижения по очищаемой поверхности, блок 19 управления измеряет количество электрического заряда, то есть напряжение на аккумуляторе 13 в заданный период времени. Если в результате измерения определяется заданное напряжение, при котором необходима зарядка аккумулятора 13, блок 19 управления возвращает робот-пылесос 10 к зарядной станции 20 для зарядки аккумулятора 13 электроэнергией.
Соответственно, робот-пылесос 10 может передвигаться в разных направлениях, беспрепятственно преодолевая порог 31, а при возникновении опасного положения может изменять направление передвижения с предотвращением его падения из опасного положения и повреждения.
Фиг.4 изображает схематическую структурную схему, иллюстрирующую роботизированную систему чистки в соответствии со вторым примерным вариантом выполнения данного изобретения
Роботизированная система чистки в соответствии с первым примерным вариантом выполнения данного изобретения конструктивно решена так, что задающий переключатель установлен на зарядной станции 20.
Однако роботизированная система чистки в соответствии со вторым примерным вариантом выполнения данного изобретения конструктивно решена так, что задающий переключатель 21 установлен на роботе-пылесосе 10, как проиллюстрировано на фиг.4. Поскольку конструкция роботизированной системы чистки по второму примерному варианту выполнения, за исключением задающего переключателя 21, аналогична конструкции роботизированной системы чистки по первому примерному варианту выполнения, их подробное описание не приведено для ясности и краткости изложения.
В роботизированной системе чистки по второму примерному варианту выполнения, поскольку задающий переключатель 21 установлен непосредственно на работе-пылесосе 10, то если значение высоты порога устанавливается задающим переключателем 21, то оно сохраняется непосредственно в запоминающем устройстве 12 робота-пылесоса 10. В этом случае, если в устройстве 12 имеется предварительно сохраненное значение высоты порога, то оно стирается и замещается с сохранением новым значением высоты порога, которое вводится задающим переключателем 21. На данном этапе процесс сравнения заново введенного значения высоты порога с предварительно сохраненным значением можно исключить.
Далее, со ссылкой на фиг.5, приведено описание способа управления роботизированной системой чистки вышеприведенной конструкции в соответствии со вторым примерным вариантом выполнения данного изобретения. Фиг.5 изображает блок-схему, иллюстрирующую способ управления роботом-пылесосом в процессе зарядки или перемещения в соответствии со вторым примерным вариантом выполнения данного изобретения.
Пользователь вводит значение высоты порога переключателем 21 (S21). Значение высоты порога, введенное вышеприведенным способом, передается непосредственно к запоминающему устройству 12 и сохраняется после уничтожения в нем ранее сохраненного значения высоты порога (S22).
Этапы S23~S29 от этапа принятия решения о режиме зарядки до этапа определения необходимости зарядки, то есть заданного напряжения, до которого должен быть заряжен аккумулятор 13, выполняются таким же способом, что и в роботизированной системе чистки по первому примерному варианту выполнения данного изобретения. Поэтому подробное описание данных операций опущено для ясности и краткости изложения.
Таким образом, в отличие от роботизированной системы чистки по первому примерному варианту выполнения данного изобретения, в котором значение высоты порога устанавливается в зарядной станции 20, роботизированная система чистки по второму примерному варианту выполнения данного изобретения может устанавливать значение высоты порога непосредственно в роботе-пылесосе 10, обеспечивая тем самым упрощение данной системы для использования и, следовательно, увеличивая ее удобство.
Как очевидно из вышеприведенного описания, в соответствии с примерными вариантами выполнения данного изобретения, роботизированная система чистки и способ управления этой системой позволяют пользователю удобно вводить значения высоты порогов в его доме задающим переключателем. Следовательно, роботизированная система чистки и способ управления ею в соответствии с примерными вариантами выполнения данного изобретения являются преимущественными в том, что даже в условиях наличия разных высот порогов, в зависимости от конструкции дома пользователей, робот-пылесос может свободно преодолевать порог, беспрепятственно передвигаясь между комнатами.
Несмотря на то что для иллюстрации принципа данного изобретения были показаны и описаны представленные варианты выполнения данного изобретения, данное изобретение не ограничивается конкретными примерными вариантами выполнения. Следует понимать, что специалистами возможно выполнение различных модификаций и изменений без отклонения от сущности и объема правовой охраны данного изобретения, изложенных в прилагаемой формуле изобретения. Таким образом, предусматривается, что объем правовой охраны данного изобретения включает подобные модификации, изменения и эквиваленты, которые все подпадают под объем правовой охраны данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАРЯДКИ РОБОТА-ПЫЛЕСОСА | 2007 |
|
RU2350252C2 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |
| МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА С НЕСКОЛЬКИМИ СМЕННЫМИ РАБОЧИМИ МОДУЛЯМИ И СПОСОБ УПРАВЛЕНИЯ ЭТОЙ СИСТЕМОЙ | 2006 |
|
RU2313442C1 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-ПЫЛЕСОСОМ | 2005 |
|
RU2317766C2 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| ПОДВИЖНЫЙ РОБОТ, В КОТОРОМ ИСПОЛЬЗУЮТ ДАТЧИК ИЗОБРАЖЕНИЯ, И СПОСОБ ИЗМЕРЕНИЯ ПРОЙДЕННОГО ИМ РАССТОЯНИЯ | 2003 |
|
RU2254227C1 |
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
Роботизированная система предназначена для осуществления очистки поверхности и содержит робот-пылесос, предназначенный для выполнения уборки при автоматическом перемещении по очищаемой поверхности, и зарядную станцию, выполненную с возможностью соединения с роботом-пылесосом для зарядки электроэнергией аккумулятора, установленного в роботе-пылесосе, и имеющую задающий переключатель для избирательного введения первого значения высоты порога. Робот-пылесос содержит блок управления, предназначенный для приема первого значения высоты порога, сохранения этого первого значения высоты порога в запоминающем устройстве, сравнения второго значения высоты порога, выявленного датчиком высоты робота-пылесоса при его перемещении, с первым значением высоты порога, управления роботом-пылесосом с обеспечением его перемещения во время преодоления порога, если второе значение высоты порога равно первому значению высоты порога или меньше его, и управления роботом-пылесосом с обеспечением его перемещения после заднего хода и поворота, если второе значение высоты порога превышает первое значение высоты порога. В варианте выполнения роботизированной системы робот-пылесос содержит задающий переключатель для избирательного введения первого значения высоты порога и блок управления, предназначенный для сохранения первого введенного значения высоты порога, сравнения второго значения высоты порога, выявленного датчиком высоты робота-пылесоса при его перемещении, с первым значением высоты порога, управления роботом-пылесосом с обеспечением его перемещения во время преодоления порога, если второе значение высоты порога равно первому значению высоты порога или меньше его, и управления роботом-пылесосом с обеспечением его перемещения после заднего хода и поворота, если второе значение высоты порога превышает первое значение высоты порога. Задающий переключатель содержит переключатель в корпусе с двухрядным расположением выводов или поворотный переключатель. Технический результат состоит в обеспечении роботизированной системой беспрепятственного преодоления порогов независимо от их высоты, которая может меняться вследствие различных конструкций домов. 2 н. и 2 з.п. ф-лы, 5 ил.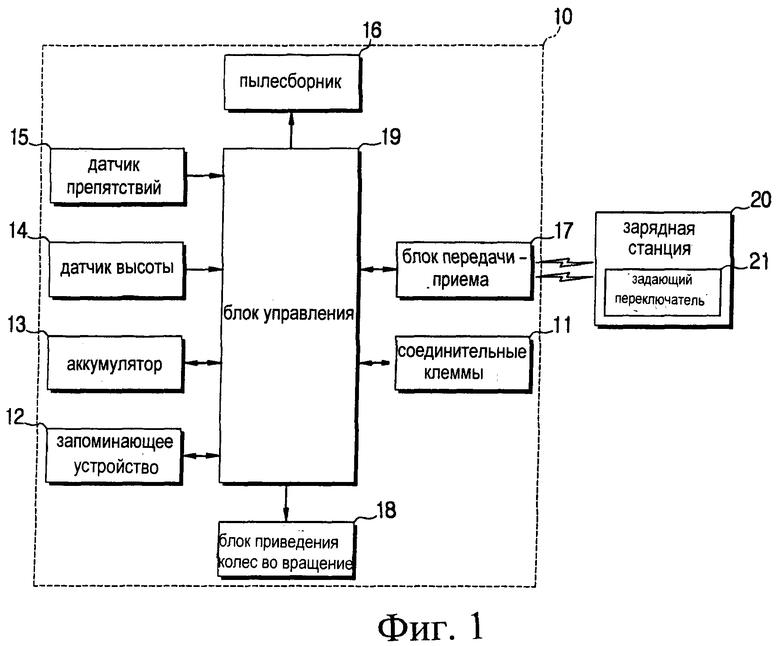
1. Роботизированная система чистки, содержащая робот-пылесос, предназначенный для выполнения уборки при автоматическом перемещении по очищаемой поверхности, и зарядную станцию, выполненную с возможностью соединения с роботом-пылесосом для зарядки электроэнергией аккумулятора, установленного в роботе-пылесосе, причем зарядная станция содержит задающий переключатель для избирательного введения первого значения высоты порога, а робот-пылесос содержит блок управления, предназначенный для приема первого значения высоты порога, сохранения этого первого значения высоты порога в запоминающем устройстве, сравнения второго значения высоты порога, выявленного датчиком высоты робота-пылесоса при его перемещении, с первым значением высоты порога, управления роботом-пылесосом с обеспечением его перемещения во время преодоления порога, если второе значение высоты порога равно первому значению высоты порога или меньше его, и управления роботом-пылесосом с обеспечением его перемещения после заднего хода и поворота, если второе значение высоты порога превышает первое значение высоты порога.
2. Роботизированная система чистки по п.1, в которой задающий переключатель содержит переключатель в корпусе с двухрядным расположением выводов или поворотный переключатель.
3. Роботизированная система чистки, содержащая робот-пылесос, предназначенный для выполнения уборки при автоматическом перемещении по очищаемой поверхности, и зарядную станцию, выполненную с возможностью соединения с роботом-пылесосом для зарядки электроэнергией аккумулятора, установленного в роботе-пылесосе, причем робот-пылесос содержит задающий переключатель для избирательного введения первого значения высоты порога и блок управления, предназначенный для сохранения первого введенного значения высоты порога, сравнения второго значения высоты порога, выявленного датчиком высоты робота-пылесоса при его перемещении, с первым значением высоты порога, управления роботом-пылесосом с обеспечением его перемещения во время преодоления порога, если второе значение высоты порога равно первому значению высоты порога или меньше его, и управления роботом-пылесосом с обеспечением его перемещения после заднего хода и поворота, если второе значение высоты порога превышает первое значение высоты порога.
4. Роботизированная система чистки по п.3, в которой задающий переключатель содержит переключатель в корпусе с двухрядным расположением выводов или поворотный переключатель.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| US 5945011 A, 31.08.1999. | |||

