Изобретение относится к машиностроению и может быть использовано в устройствах с изменяемым ходом исполнительного звена.
Известны кривошипно-ползунные механизмы, в которых в качестве исполнительного звена использован ползун, связанный с рабочим инструментом и снабженный устройством для изменения своего хода и скорости при непрерывном вращении кривошипа /см., например, АС СССР №630470, кл. F16H 21/20, 1977 [1]; АС СССР №903630, кл. F16H 21/20, 1982 [2]; Артоболевский И.И. Механизмы в современной технике, т. 2, М., "Наука", 1971, с. 444, рис. 1477 [3]; АС СССР №920303, кл. F16H 21/20, 1980 [4]; АС СССР №777285, кл. F16H 21/28, 1978 [5]/.
Недостатками известных устройств являются значительные сложности конструкций и невозможность автоматического адаптивного изменения хода и скорости ползуна в зависимости от нагрузок на рабочий инструмент.
При этом известны, например, устройства для автоматического адаптивного управления металлорежущими станками, автоматически изменяющие величину подачи режущего инструмента при изменении нагрузки / усилия резания / на последний / см., АС СССР №1172675, кл. B23Q 15/12, 1984 [6]; АС СССР №889385, кл. B23Q 15/013, 1979 [7] /, а также машины ударного действия с кривошипно-ползунными механизмами / см., например, АС СССР №1047676, кл. B25Q 11/12, 1982 [8]; АС СССР №1590368, кл. B25D 11/04, 1988 [9] /, в которых перемещение рабочего инструмента автоматически связано с плотностью и твердостью разрушаемого инструментом материала.
Однако использование в известных адаптивных устройствах ползуна кривошипно-ползунного механизма в качестве исполнительного звена приведет к предельному усложнению конструкций за счет применения специальных систем регулирования.
Известны принципы действия ряда способов, согласно которым интенсивность режимов осуществления различных процессов механической обработки, регулировки и т.п. оценивают по температуре саморазогрева различных деталей и узлов / например, шпиндельных узлов токарных станков /, участвующих в данных процессах / см., например, АС СССР №1294569, кл. B23Q 11/14, 1985 [10] /.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности существенных признаков является кривошипно-ползунный дезаксиальный механизм, состоящий из установленных на основании кривошипа в качестве ведущего звена, ползуна в качестве ведомого исполнительного звена, связанного с рабочим инструментом, при этом дезаксиал, выполненный выше оси вращения кривошипа, сформирован жестко закрепленной на ползуне одним из концов стойкой, шарнирно соединенной другим концом с помощью шатуна с кривошипом / см. Артоболевский И.И. Механизмы в современной технике., т. 2, М., "Наука", 1979, с. 438, рис, 1406 [11] /, и принятый за прототип.
Недостатками устройства-прототипа является невозможность автоматического адаптивного изменения непосредственно в процессе работы хода связанного с рабочим инструментом ползуна в зависимости от нагрузок на рабочий инструмент. Это приводит к возможности снижения надежности и стабильности работы устройства, а также опасности его заклинивания и поломок в критических режимах при перегрузках в случаях изменения твердости и плотности обрабатываемых материалов, к снижению эксплуатационных возможностей устройства.
Сущность изобретения заключается в создании простой конструкции кривошипно-ползунного дезаксиального механизма, в котором элемент, формирующий дезаксиал, имеет возможность адаптивного увеличения своего линейного размера при заданном увеличении температуры связанного с ползуном рабочего инструмента, что приводит к автоматическому уменьшению продольного хода инструмента.
Технический результат - улучшение эксплуатационных характеристик устройства за счет обеспечения возможности его автоматической адаптации к параметрам обрабатываемой среды.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном кривошипно-ползунном дезаксиальном механизме с кривошипом в качестве ведущего звена, ползуна в качестве ведомого исполнительного звена, связанного с рабочим инструментом, и дезаксиалом, сформированным жестко закрепленной на ползуне одним из концов стойкой, шарнирно соединенной другим концом с помощью шатуна с кривошипом, особенность заключается в том, что формирующая дезаксиал стойка выполнена в форме эллиптического кольца, ориентированного своей большей полуосью вдоль ползуна и изготовленного из сплава с эффектом памяти механической формы, характеризующегося несколькими последовательно нарастающими температурными порогами срабатывания, сопровождающимися релейными деформациями кольца с его расширением в ортогональном ползуну направлении вдоль меньшей полуоси эллипса.
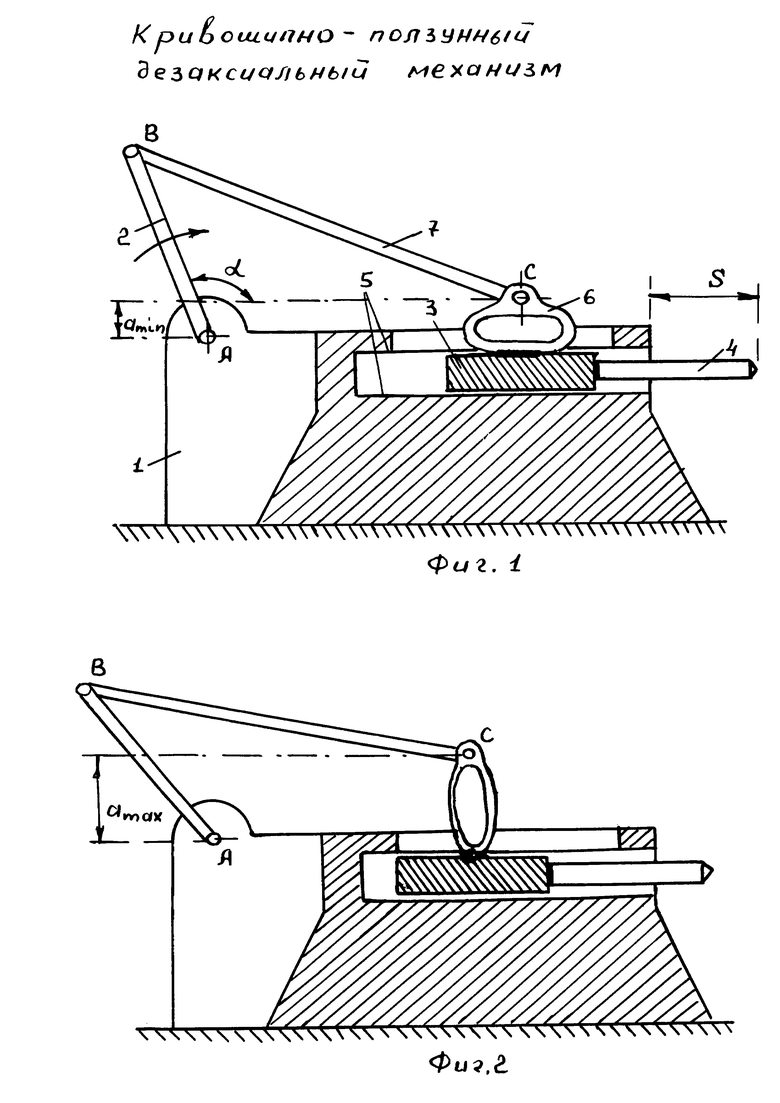
Сущность изобретения поясняется чертежами, где на фиг. 1 схематично на виде сбоку изображен предлагаемый механизм в рабочем состоянии с текущим положением рабочего инструмента при минимальном дезаксиале; на фиг. 2 - в положении после нескольких релейных срабатываний стойки дезаксиала до его максимального значения.
Кривошипно-ползунный дезаксиальный механизм содержит установленные на корпусе 1 имеющий возможность поворота кривошип 2 в качестве ведущего звена, а также ползун 3 в качестве ведомого исполнительного звена, связанного с рабочим инструментом 4, имеющий возможность возвратно-поступательного перемещения в прямолинейных направляющих 5 на корпусе 1. При этом механизм снабжен дезаксиалом, сформированным в виде жестко закрепленной на ползуне 3 одним из концов стойки 6, шарнирно соединенной другим концом с помощью шатуна 7 со свободным концом кривошипа 2, причем ось вращения С шатуна 7 относительно стойки 6 расположена выше оси вращения А кривошипа 2 на корпусе 1 на величину a дезаксиала. Формирующая дезаксиал а стойка 6 выполнена в форме эллиптического кольца, исходно в рабочем состоянии ориентированного своей большей полуосью вдоль ползуна 3 и приваренного к ползуну 3 средней частью своей нижней поверхности / см. утолщение на фиг. 1 /. При этом стойка 6 изготовлена из сплава с эффектом памяти механической формы типа нитинол / TiNi /, относящегося к классу интерметаллических соединений, характеризующегося несколькими последовательно нарастающими температурными порогами срабатывания, сопровождающимися релейными деформациями кольца 6 с его расширением в ортогональном ползуну 3 направлении вдоль меньшей полуоси эллипса / см. фиг. 2 /.
Работа предлагаемого устройства осуществляется следующим образом.
На фиг. 1 показан предлагаемый механизм в текущем рабочем положении при минимальной исходной величине дезаксиала amin и выступании S рабочего инструмента 4 из корпуса 1 вправо на заданную величину. В случае возникновения сложного режима работы инструмента 4 при заданном ходе / высокая твердость и плотность среды, наличие посторонних внедрений и т.п. /, и, соответственно, большой вероятности поломки инструмента, происходит его разогрев вместе с ползуном 3 и кольцом 6 до первого температурного порога срабатывания, например, порядка 80°C, в результате чего кольцо 6 релейно деформируется с расширением в сторону своей меньшей полуоси, ортогональной ползуну 3, при этом величина дезаксиала a увеличится, что приводит автоматически / см. ниже / к уменьшению хода рабочего инструмента 4, то есть к уменьшению его выступания вправо из корпуса 1. При сохранении опасного режима работы инструмента 4 под нагрузкой и достижении температурой его нагрева величины порядка 120°C произойдет повторное релейное срабатывание эллиптического кольца 6. На фиг. 2 показано положение эллиптической стойки 6 после нескольких срабатываний с нарастающими температурными порогами с максимальной величиной дезаксиала amax, и, соответственно, минимальной величине хода рабочего инструмента 4 вправо. Указанное уменьшение хода автоматически приведет к снижению интенсивности или полному срыву режима обработки, и, соответственно, к снижению температуры рабочего инструмента 4, ползуна 3, стойки 6, и релейному ступенчатому возвращению стойки 6 к исходному состоянию на фиг. 1.
В качестве примера с помощью аналитических зависимостей, приведенных в [II] на той же странице, были получены величины S рабочего хода ползуна 3 с инструментом 4 / а более конкретно - выход инструмента 4 из корпуса 1 / при заданных конструктивных параметрах механизма и относительном расположении его элементов, но при различных величинах дезаксиала a:
AB=50 мм, BC=135 мм, α≈120°
1. при a1=0 S1=82,8 мм 2. при a2=10 мм S2=79,27 мм
3. при a3=20 мм S3=76,08 мм 4. при a4=30 мм S4=72,7 мм.
Предлагаемая конструкция характеризуется сравнительной простотой и одновременно за счет автоматической адаптации режимов обработки к параметрам среды позволяет улучшить эксплуатационные характеристики устройства, повысить его надежность, работы, стабильность, уменьшить вероятность поломок и заклинивания рабочего инструмента при различных характеристиках твердости и плотности обрабатываемой среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-ползунный механизм | 2017 |
|
RU2655124C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2265726C2 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ ПО МЕХАНИЧЕСКОМУ ЦИКЛУ ЯРИМОВА И ДВИГАТЕЛЬ ЯРИМОВА | 2003 |
|
RU2249709C2 |
| МНОГОПЛУНЖЕРНЫЙ НАСОС | 1999 |
|
RU2168064C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЯРИМОВА | 2005 |
|
RU2290520C1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| КОСТЫЛЕЗАБИВЩИК ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ | 2005 |
|
RU2284387C1 |
| Кривошипно-ползунный дезаксиальный механизм | 1988 |
|
SU1613751A1 |
| Шарнирно-рычажный механизм переменной структуры | 2017 |
|
RU2655567C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
Изобретение относится к области машиностроения, а более конкретно к кривошипно-ползунным механизмам. Кривошипно-ползунный дезаксиальный механизм содержит установленные на корпусе (1) ведущий кривошип (2) и ведомый ползун (3), связанный с рабочим инструментом (4). Механизм имеет дезаксиал, сформированный в виде жестко закрепленной на ползуне стойки (6), шарнирно соединенной с кривошипом. Стойка (6) выполнена в виде эллиптического кольца и изготовлена из сплава с эффектом памяти механической формы. Материал характеризуется несколькими последовательно нарастающими температурными порогами срабатывания, сопровождающимися релейными деформациями кольца (6) с его расширением в ортогональном ползуну направлении вдоль меньшей полуоси эллипса. Достигается повышение надежности. 2 ил.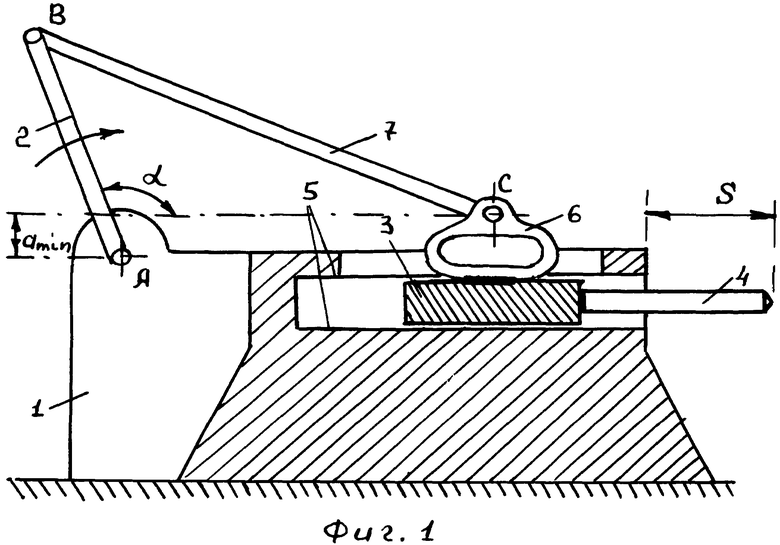
Кривошипно-ползунный дезаксиальный механизм с кривошипом в качестве ведущего звена, ползуном в качестве ведомого исполнительного звена, связанного с рабочим инструментом, и дезаксиалом, сформированным жестко закрепленной на ползуне одним из концов стойкой, шарнирно соединенной другим концом с помощью шатуна с кривошипом, отличающийся тем, что формирующая дезаксиал стойка выполнена в форме эллиптического кольца, ориентированного своей большей полуосью вдоль ползуна и изготовленного из сплава с эффектом памяти механической формы, характеризующегося несколькими последовательно нарастающими температурными порогами срабатывания, сопровождающимися релейными деформациями кольца с его расширением в ортогональном ползуну направлении вдоль меньшей полуоси эллипса.
| Кривошипно-шатунный дезаксиальный механизм | 1957 |
|
SU114835A1 |
| US 2008006115 A1, 10.01.2008 | |||
| Шариковый винтовой механизм | 1984 |
|
SU1200043A1 |
| ЗУБЧАТОЕ КОЛЕСО | 1990 |
|
RU2067705C1 |
| US 20080223158 A1, 18.09.2008 | |||
| US 8307818 B2, 13.11.2012. | |||

