Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для двигателя внутреннего сгорания с переменной степенью сжатия, оснащенного механизмом переменной степени сжатия, приспособленным изменять степень сжатия двигателя в соответствии с угловым положением вала управления.
Уровень техники
[0002] Патентный документ 1 раскрывает двигатель внутреннего сгорания (далее в данном документе называемый "двигателем внутреннего сгорания с переменной степенью сжатия"), оснащенный механизмом переменной степени сжатия, приспособленным изменять степень сжатия двигателя в соответствии с угловым положением вала управления.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1: Японская патентная предварительная публикация № JP 2013-253512
Сущность изобретения
Техническая задача
[0004] В таком двигателе внутреннего сгорания с переменной степенью сжатия, в качестве блока определения степени сжатия, который определяет фактическую степень сжатия, соответствующую фактической степени сжатия двигателя, например, предусматривается датчик вращения, чтобы определять угловое положение вала управления, соответствующее фактической степени сжатия. Также, чтобы обеспечивать точность определения блока определения степени сжатия, например, непосредственно после запуска двигателя или непосредственно перед остановкой двигателя, операция изучения исходного положения (операция инициализации), в которой обнаруженное значение блока определения степени сжатия инициализируется в первоначальное значение, соответствующее исходному положению, выполняется с валом управления, механически заблокированным в предварительно определенном исходном положении.
[0005] Однако, во время работы двигателя, когда фактическая степень сжатия теряется вследствие ошибки связи или т.п., или когда разница между фактической степенью сжатия и целевой степенью сжатия становится больше допустимого отклонения вследствие некоторых неисправностей, фактическая степень сжатия, определяемая посредством блока определения степени сжатия, становится неизвестной или попадает в состояние, когда ошибка становится большой. Это ведет к трудности выполнения нормального управления степенью сжатия двигателя. В результате этого, существует вероятность, что степень сжатия отклоняется или расходится с соответствующей целевой степенью сжатия, таким образом, вызывая состояние ухудшенного сгорания, следовательно, ухудшения в топливной экономичности, выходной мощности, крутящем моменте, выбросах выхлопных газов, характеристиках шума/вибрации и т.п.
[0006] Следовательно, принимая во внимание ранее описанные обстоятельства, задачей настоящего изобретения является подавление ухудшения рабочих характеристик двигателя до минимума посредством быстрого возврата в состояние, когда фактическая степень сжатия может быть определена нормально посредством блока определения степени сжатия, даже когда фактическая степень сжатия теряется, или разница между фактической степенью сжатия и целевой степенью сжатия становится больше допустимого отклонения, вследствие некоторых неисправностей во время работы двигателя.
Решение задачи
[0007] Настоящее изобретение относится к устройству управления для двигателя внутреннего сгорания с переменной степенью сжатия, оснащенному механизмом переменной степени сжатия для изменения степени сжатия двигателя в соответствии с угловым положением вала управления, и выполненному с возможностью управлять механизмом переменной степени сжатия до целевой степени сжатия, заданной в соответствии с состоянием работы двигателя. Также предоставляется блок определения степени сжатия, который определяет фактическую степень сжатия, соответствующую фактической степени сжатия двигателя. В предварительно определенном состоянии работы двигателя, таком как непосредственно после запуска двигателя или непосредственно перед остановкой двигателя, операция изучения исходного положения (операция инициализации), в которой обнаруженное значение блока определения степени сжатия инициализируется в первоначальное значение, соответствующее исходному положению, выполняется с валом управления, механически заблокированным в предварительно определенном исходном положении.
[0008] Также, в настоящем изобретении, во время работы двигателя, даже когда фактическая степень сжатия теряется вследствие ошибки связи или т.п., или даже когда разница между фактической степенью сжатия и целевой степенью сжатия становится больше допустимого отклонения вследствие некоторых неисправностей, выполняется операция изучения исходного положения.
Преимущества изобретения
[0009] Согласно настоящему изобретению, во время работы двигателя, когда фактическая степень сжатия теряется вследствие ошибки связи или т.п., или когда разница между фактической степенью сжатия и целевой степенью сжатия становится больше допустимого отклонения вследствие некоторых неисправностей, немедленно выполняется операция изучения исходного положения, таким образом, предоставляя возможность быстрого возврата в первоначальное состояние, когда фактическая степень сжатия может быть определена нормально посредством блока определения степени сжатия. Следовательно, даже когда фактическая степень сжатия теряется, или даже когда разница между фактической степенью сжатия и целевой степенью сжатия становится больше предварительно определенного значения, реализуется быстрый возврат в состояние, когда нормальное управление степенью сжатия может быть выполнено. Следовательно, представляется возможным подавлять ухудшение рабочих характеристик двигателя до минимума.
Краткое описание чертежей
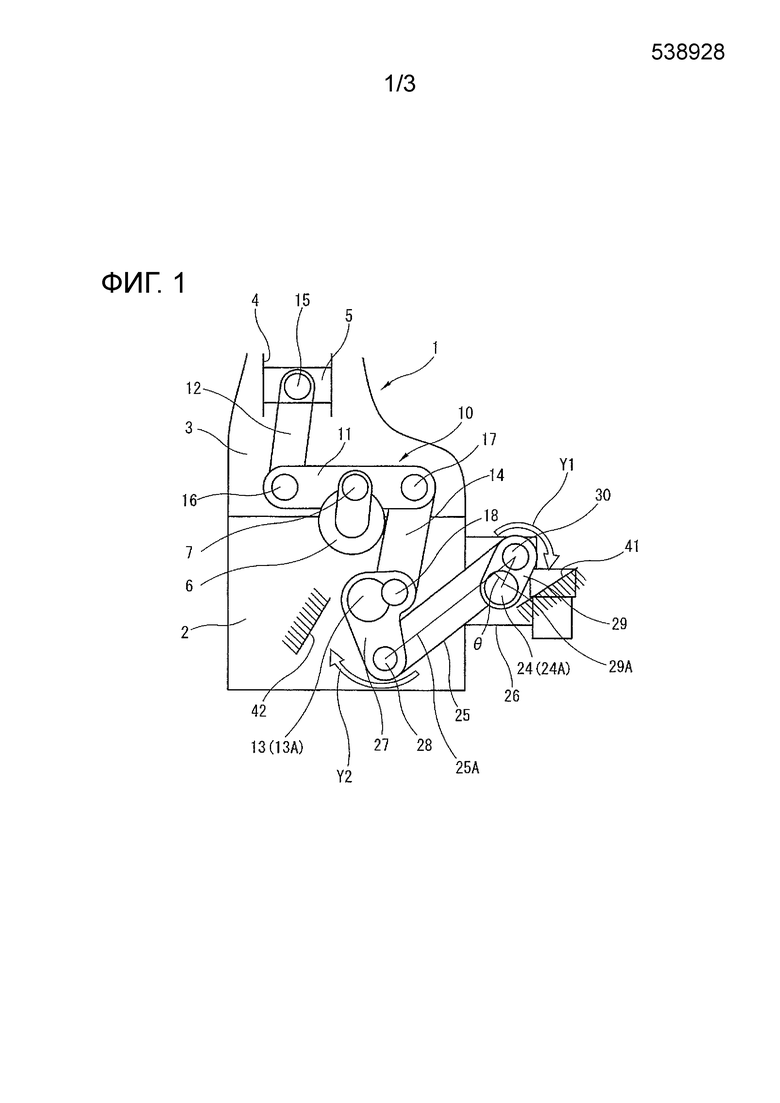
[0010] Фиг. 1 - это чертеж, схематично иллюстрирующий конфигурацию устройства управления для двигателя внутреннего сгорания с переменной степенью сжатия, оснащенного механизмом переменной степени сжатия, в одном варианте осуществления, к которому изобретение применяется.
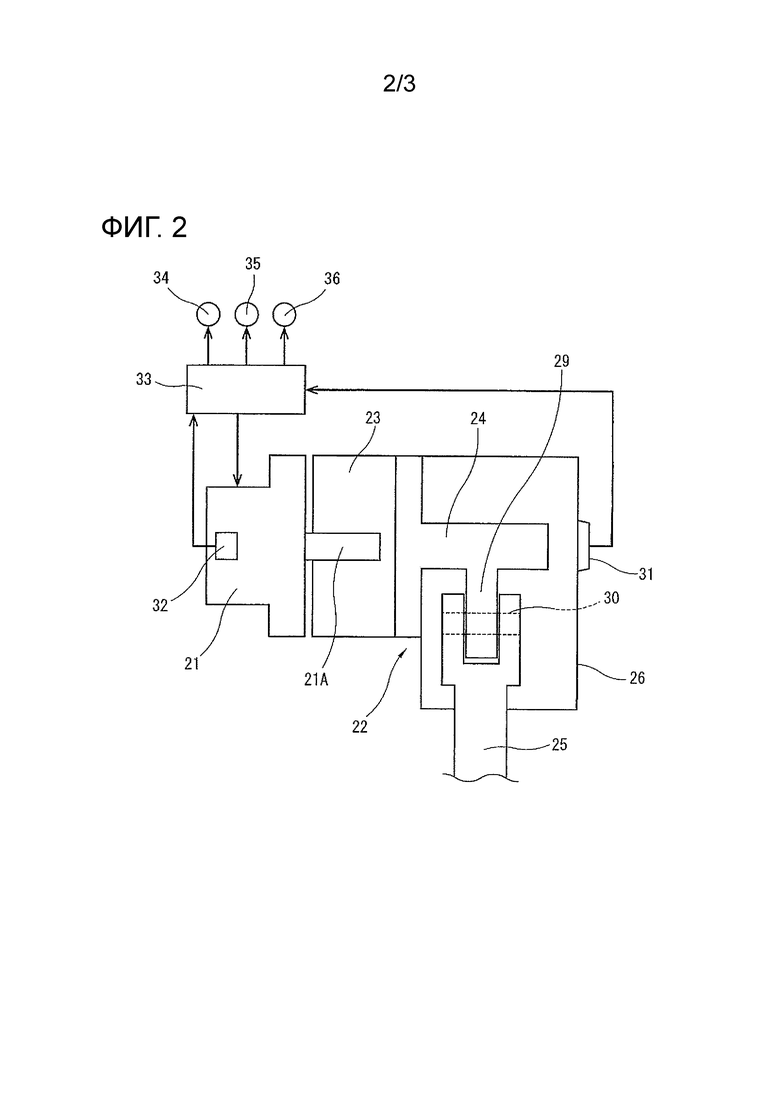
Фиг. 2 - это чертеж, схематично иллюстрирующий конфигурацию устройства управления для двигателя внутреннего сгорания с переменной степенью сжатия варианта осуществления.
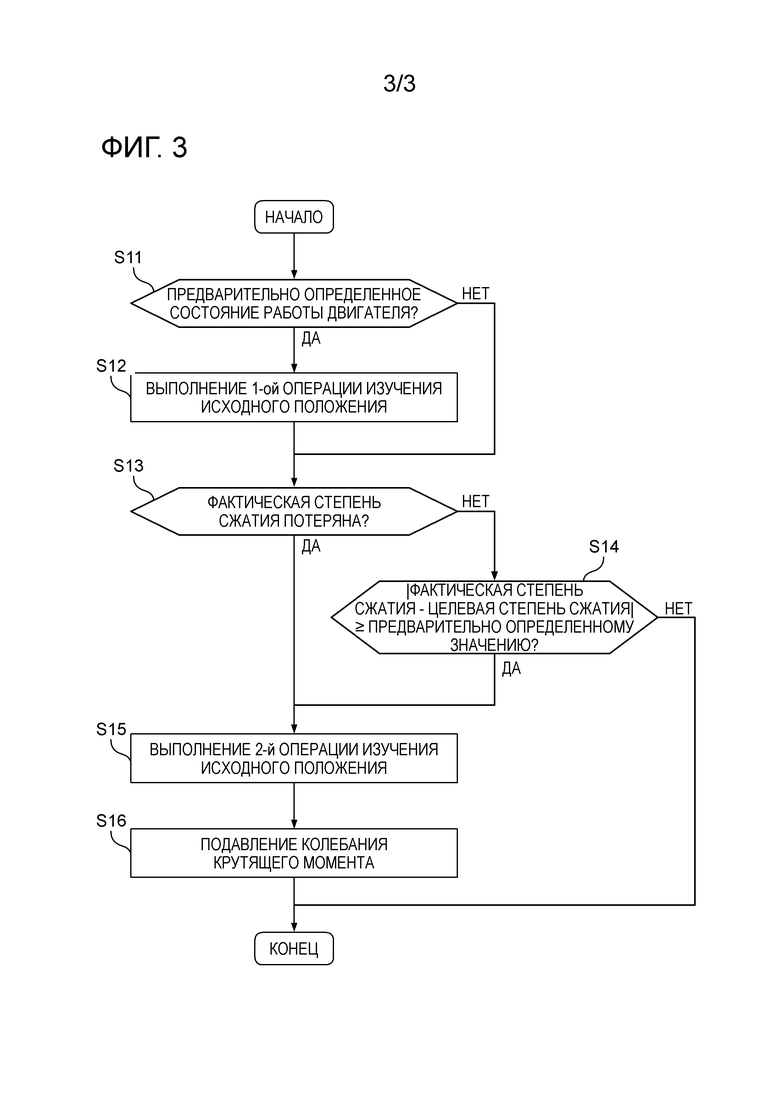
Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая последовательность управления в варианте осуществления.
Подробное описание вариантов осуществления
[0011] Далее в данном документе со ссылкой на фиг. 1-3 объясняется устройство управления для двигателя 1 внутреннего сгорания с переменной степенью сжатия, оснащенного механизмом 10 переменной степени сжатия в одном варианте осуществления согласно настоящему изобретению.
[0012] Со ссылкой на фиг. 1, двигатель 1 внутреннего сгорания с переменной степенью сжатия, главным образом, конструируется посредством блока 2 цилиндров, служащего в качестве основной части двигателя, и головки 3 цилиндров, прикрепленной на блок 2 цилиндров. Поршень 5 с возможностью подъема (с возможностью скольжения) вставлен в цилиндр 4 головки 3 цилиндров.
[0013] Механизм 10 переменной степени сжатия имеет нижнее звено 11, верхнее звено 12, вал 13 управления и звено 14 управления. Нижнее звено устанавливается с возможностью вращения на шатунную шейку 7 коленчатого вала 6. Верхнее звено выполнено с возможностью соединять нижнее звено 11 и поршень 5. Вал управления поддерживается с возможностью вращения на блоке 2 цилиндров. Звено управления выполнено с возможностью соединять вал 13 управления и нижнее звено 11. Верхний конец верхнего звена 12 и поршень 5 соединяются друг с другом посредством поршневого пальца 15 так, чтобы предоставлять возможность относительного вращения между ними. Верхнее звено 12 и нижнее звено 11 соединяются друг с другом посредством первого соединительного штифта 16 так, чтобы предоставлять возможность относительного вращения между ними. Нижнее звено 11 и верхний конец звена 14 управления соединяются друг с другом посредством второго соединительного штифта 17 так, чтобы разрешать относительное вращение между ними. Нижний конец звена 14 управления устанавливается с возможностью вращения на эксцентриковый вал 18 управления, предусмотренный эксцентрически по отношению к шейке 13A, служащей в качестве центра вращения вала 13 управления.
[0014] Как показано на фиг. 2, механизм 22 понижения скорости вращения вставляется на пути передачи мощности между валом 13 управления и выходным валом 21A мотора 21, служащего в качестве исполнительного устройства, который приводит во вращение вал 13 управления, для уменьшения крутящего момента выходного вала 21A мотора 21 и для передачи мощности с пониженной скоростью валу 13 управления. Механизм 22 понижения скорости имеет редуктор 23 скорости, такой как передаточное устройство с волнообразным движением, которое обеспечивает высокие передаточные числа, вал 24 вращения, который вращается как одно целое с выходным валом редуктора 23 скорости, и рычаг 25, выполненный с возможностью соединять вал 24 вращения и вал 13 управления (см. фиг. 1). Вал 24 вращения приспосабливается и размещается внутри корпуса 26, неподвижно соединенного и расположенного бок о бок с блоком 2 цилиндров. Вал вращения поддерживается с возможностью вращения внутри корпуса 26 и размещается параллельно валу 13 управления. Рычаг 25 структурируется, чтобы протягиваться через щели блока 2 цилиндров и корпуса 26.
[0015] Один конец рычага 25 и верхний конец первого плеча 27, протягивающегося радиально от шейки 13A вала 13 управления, соединяются друг с другом посредством третьего соединительного штифта 28, так, чтобы предоставлять возможность относительного вращения между ними. Другой конец рычага 25 и верхний конец второго плеча 29, протягивающегося радиально от шейки 24A, служащей в качестве центра вращения вала 24 вращения, соединяются друг с другом посредством четвертого соединительного штифта 30, так, чтобы предоставлять возможность относительного вращения между ними.
[0016] В механизме 10 переменной степени сжатия, сконструированном, как обсуждено выше, когда угловое положение вала 13 управления изменяется посредством мотора 21 через механизм 22 понижения скорости, возникает изменение в угловом пространственном положении нижнего звена 11, и, таким образом, возникает изменение в характеристике хода поршня 5, включающего в себя положение верхней мертвой точки (TDC) поршня и положение нижней мертвой точки (BDC) поршня. Таким образом, степень сжатия двигателя постоянно изменяется.
[0017] Со ссылкой на фиг. 2, в качестве блока определения степени сжатия, который определяет фактическую степень сжатия, которая является фактической степенью сжатия двигателя, датчик 31 вращения устанавливается на корпус 26 для определения углового положения вала 24 вращения, соответствующего фактической степени сжатия. Также, датчик 32 определения скорости мотора устанавливается на мотор 21 для определения скорости мотора.
[0018] Блок 33 управления является цифровой компьютерной системой, приспособленной хранить и исполнять различные управляющие процессы. Блок управления выполнено с возможностью выводить управляющие сигналы различным исполнительным устройствам на основе состояния работы двигателя, определенного посредством датчиков 31, 32 и т.п., для управления целиком соответствующими операциями этих исполнительных устройств. Конкретно, блок управления выполнено с возможностью управлять приводом механизма 34 регулирования фаз газораспределения, приспособленным изменять хронирование впускного клапана (или хронирование выпускного клапана) для управления моментом открытия впускного клапана (IVO) и моментом закрытия впускного клапана (IVC). Также, блок управления выполнено с возможностью управлять приведением в действие свечи 35 зажигания, которая зажигает искрой воздушно-топливную смесь в камере сгорания, для управления моментом зажигания. Кроме того, блок управления выполнено с возможностью управлять приводом электронно-управляемой дроссельной заслонки 36, которая открывает или закрывает канал всасываемого воздуха, для управления открытием дроссельной заслонки.
[0019] Дополнительно, бок 33 управления выполнено с возможностью задавать целевую степень сжатия на основе состояний работы двигателя и регулировать с обратной связью работу мотора 21 для поддержания отклонения между целевой степенью сжатия и фактической степенью сжатия, определенной посредством датчика 31 вращения, настолько малым, насколько возможно.
[0020] Как схематично показано на фиг. 1, диапазон вращения каждого из вала 13 управления и вала 24 вращения, оба связаны вместе таким образом, чтобы вращаться в сочетании друг с другом, механически ограничивается или лимитируется посредством поверхности 41 стопора на стороне низкой степени сжатия и поверхности 42 стопора на стороне высокой степени сжатия. Например, в показанном варианте осуществления, поверхность 41 стопора на стороне низкой степени сжатия предусматривается внутри корпуса 26. Когда вал 24 вращения поворачивается в сторону максимально низкой степени сжатия (т.е., в направлении, указанном стрелкой "Y1" на фиг. 1), боковая поверхность второго плеча 29 приводится в упорный контакт с поверхностью 41 стопора на стороне низкой степени сжатия. Следовательно, вал 13 управления и вал 24 вращения структурируются, чтобы механически блокироваться в положении стопора на стороне низкой степени сжатия. С другой стороны, поверхность 42 стопора на стороне высокой степени сжатия предусматривается внутри блока 2 цилиндров. Когда вал 13 управления поворачивается в сторону максимально высокой степени сжатия (т.е., в направлении, указанном стрелкой "Y2" на фиг. 1), боковая поверхность первого плеча 27 приводится в упорный контакт с поверхностью 42 стопора на стороне высокой степени сжатия. Следовательно, вал 13 управления и вал 24 вращения также структурируются, чтобы механически блокироваться в положении стопора на стороне высокой степени сжатия.
[0021] Содержимое управления, которое является неотъемлемым для варианта осуществления, объясняется подробно со ссылкой на блок-схему последовательности операций на фиг. 3. Программа на фиг. 3 хранится в памяти, включенной в блок 33 управления, и повторяющимся образом выполняется в каждых предварительно определенных интервалах времени, например, 10 миллисекунд.
[0022] На этапе S11 выполняется проверка, чтобы определять, удовлетворяется или нет предварительно определенное состояние работы двигателя (например, непосредственно после запуска двигателя или непосредственно перед остановкой двигателя), в котором выполняется операция изучения исходного положения (операция инициализации) для датчика 31 вращения. Когда предварительно определенное состояние работы двигателя не удовлетворяется, программа переходит к этапу S13 (описанному позже), в то же время опуская (пропуская) этап S12.
[0023] В отличие от этого, когда предварительно определенное состояние работы двигателя, в котором операция изучения исходного положения должна быть выполнена, удовлетворяется, программа переходит к этапу S12, на котором выполняется первая операция изучения исходного положения. В этой первой операции изучения исходного положения, в точно определенном состоянии, когда, с валом 24 вращения в упорном контакте с поверхностью 41 стопора на стороне низкой степени сжатия, вал 13 управления, а также вал 24 вращения, был механически заблокирован в положении стопора на стороне низкой степени сжатия, служащем в качестве исходного положения, обнаруженное значение датчика 31 вращения, соответствующее фактической степени сжатия, изучается и инициализируется в заданное первоначальное значение, соответствующее исходному положению. Посредством операции изучения и инициализации отношение соответствия между фактическим угловым положением каждого из вала 13 управления и вала 24 вращения и фактической степенью сжатия, определенной посредством датчика 31 вращения, может быть сброшено в первоначальное нормальное состояние.
[0024] К слову, в показанном варианте осуществления, в ранее обсуждаемой первой операции изучения исходного положения, положение стопора на стороне низкой степени сжатия, в котором вал 24 вращения был приведен в упорный контакт с поверхностью 41 стопора на стороне низкой степени сжатия, используется в качестве исходного положения. Вместо этого, положение стопора на стороне высокой степени сжатия, в котором вал 13 управления был приведен в упорный контакт со стороной 42 стопора на стороне высокой степени сжатия, может быть использовано в качестве исходного положения.
[0025] На этапе S13 выполняется проверка, чтобы определять, потерял или нет блок 33 управления фактическую степень сжатия, определенную посредством датчика 31 вращения, по некоторым причинам, таким как ошибка связи или т.п. Также, на этапе S14, выполняется проверка, чтобы определять, присутствует или нет ненормальное состояние, когда разница между фактической степенью сжатия и целевой степенью сжатия больше или равно предварительно определенному значению. Когда ответ на этапе S13 и ответ на этапе S14 оба являются отрицательными (Нет), т.е., когда фактическая степень сжатия не теряется, и присутствует нормальное состояние, когда разница между фактической степенью сжатия и целевой степенью сжатия меньше предварительно определенного значения, один цикл выполнения программы завершается, пропуская оба этапа S15, S16 (описаны позже).
[0026] В отличие от этого, когда, по меньшей мере, один из ответа на этапе S13 и ответа на этапе S14 является положительным (Да), т.е. когда фактическая степень сжатия теряется, или присутствует ненормальное состояние, когда разница между фактической степенью сжатия и целевой степенью сжатия больше или равно предварительно определенному значению, этапы S15 и S16 выполняются в таком порядке. На этапе S15 выполняется вторая операция изучения исходного положения. В этой второй операции изучения исходного положения, способом, аналогичным ранее описанной первой операции изучения исходного положения, в точно определенном состоянии, когда, с валом 24 вращения в упорном контакте с поверхностью 41 стопора на стороне низкой степени сжатия, вал 13 управления, а также вал 24 вращения, был механически заблокирован в положении стопора на стороне низкой степени сжатия, служащей в качестве исходного положения, обнаруженное значение датчика 31 вращения изучается и инициализируется в заданное первоначальное значение, соответствующее исходному положению. Посредством операции изучения и инициализации отношение соответствия между обнаруженным значением датчика 31 вращения и угловым положением каждого из вала 13 управления и вала 24 вращения может быть возвращено в первоначальное нормальное состояние.
[0027] Вслед за вышеописанным, на этапе S16, для того, чтобы поглощать или гасить колебание крутящего момента, вызванное колебанием степени сжатия двигателя, возникающим вследствие выполнения операции изучения исходного положения, выполняется операция подавления колебания крутящего момента. Конкретно, согласно вращению вала 13 управления, а также вала 24 вращения, по направлению к положению стопора на стороне низкой степени сжатия, служащей в качестве исходного положения, происходит изменение в степени сжатия двигателя в сторону низкой степени сжатия, и, таким образом, происходит падение в выходном крутящем моменте двигателя. Следовательно, чтобы компенсировать падение выходного крутящего момента двигателя, выполняется управление увеличением крутящего момента, в котором выходной крутящий момент двигателя увеличивается. Например, по меньшей мере, выполняется одно из опережения в моменте закрытия впускного клапана, достигнутого посредством механизма 34 регулирования фаз газораспределения, опережения в моменте зажигания свечи 35 зажигания и увеличения открытия дроссельной заслонки для электронно-управляемой дроссельной заслонки 36.
[0028] Указанная конфигурация варианта осуществления и ее работа и результаты перечисляются ниже в данном документе.
[0029] (1) Когда фактическая степень сжатия теряется вследствие ошибки связи или т.п., или когда разница между фактической степенью сжатия и целевой степенью сжатия отклоняется или расходится больше чем на допустимое отклонение вследствие некоторых неисправностей, существует вероятность, что большая ошибка формируется или включается в фактическую степень сжатия, обнаруженную посредством датчика 31 вращения. Таким образом, когда фактическая степень сжатия значительно отклоняется в сторону высокой степени сжатия, существует вероятность, что поршень 5 чрезмерно приближается к клапанам, возникает детонация, и/или возникает ненормальный шум вследствие касания-столкновения вала 13 управления с поверхностью 42 стопора или касания-столкновения вала 24 вращения с поверхностью 41 стопора. В качестве примера, в нормальном состоянии, когда управление степенью сжатия выполняется нормально, управление выполняется так, чтобы не приводить вал 13 управления и вал 24 вращения в касание-столкновение с соответствующими поверхностями 42, 41 стопоров. В отличие от этого, когда фактическая степень сжатия значительно отклоняется в сторону низкой степени сжатия, существует вероятность, что состояние сгорания ухудшается, и, таким образом, несколько рабочих характеристик двигателя, таких как топливная экономичность, выходная мощность, крутящий момент, выбросы выхлопных газов, характеристики шум/вибрация и т.п., имеют тенденцию ухудшаться.
[0030] Следовательно, в показанном варианте осуществления, когда фактическая степень сжатия теряется, или когда разница между фактической степенью сжатия и целевой степенью сжатия отклоняется или расходится больше чем на допустимое отклонение вследствие некоторых неисправностей, немедленно выполняется вторая операция изучения исходного положения. Следовательно, отношение соответствия между обнаруженным значением датчика 31 вращения и фактическим угловым положением каждого из вала 13 управления и вала 24 вращения может быть возвращено в нормальное состояние. Следовательно, посредством быстрого возврата датчика 31 вращения в его нормальное первоначальное состояние, представляется возможным устранять или решать, за короткое время, такое состояние, когда ошибка в фактической степени сжатия является большой, и, таким образом, нормальное управление степенью сжатия не может выполняться, тем самым, подавляя ухудшение рабочих характеристик двигателя, таких как топливная экономичность, выходная мощность, крутящий момент и т.п., до минимума.
[0031] (2) Когда выполняется операция изучения исходного положения вследствие потери степени сжатия или вследствие разница между фактической степенью сжатия и целевой степенью сжатия, отклоняющегося больше чем на допустимое отклонение, предпочтительно, как ранее объяснено в показанном варианте осуществления, в точно определенном состоянии, когда вал 24 вращения был приведен в упорный контакт с поверхностью 41 стопора на стороне низкой степени сжатия, т.е. в точно определенном состоянии, когда вал 13 управления, а также вал 24 вращения, был механически заблокирован в положении стопора на стороне низкой степени сжатия, выполняется операция изучения исходного положения.
[0032] Причина этого объясняется ниже в данном документе. Момент, вызванный нагрузкой сгорания и инерционной нагрузкой, действует на вал 24 вращения в направлении "Y1" вращения, направленном в сторону низкой степени сжатия. Следовательно, даже во время работы под высокой нагрузкой, при которой применяется большая нагрузка сгорания, или даже во время работы с высокой скоростью, при которой применяется большая инерционная нагрузка, вал 24 вращения может безусловно и точно поворачиваться по направлению к положению стопора на стороне низкой степени сжатия, служащему в качестве исходного положения, с помощью нагрузки сгорания и инерционной нагрузки, и, таким образом, операция изучения исходного положения может быть точно выполнена.
[0033] Дополнительно, посредством задания исходного положения в сторону низкой степени сжатия, представляется возможным более определенно подавлять возникновение детонации. Следовательно, с целью избегания возникновения детонации, необязательно ограничивать выходную мощность двигателя (нагрузку двигателя).
[0034] (3) В точно определенном состоянии, когда, с валом 24 вращения, приведенным в упорный контакт с поверхностью 41 стопора на стороне низкой степени сжатия, вал 13 управления, а также вал 24 вращения, был механически заблокирован в положении стопора на стороне низкой степени сжатия, вал 24 вращения располагается в предварительно определенном угловом диапазоне, содержащем угловое положение, так что крутящий момент вокруг вала 24 вращения, причем этот крутящий момент передается от вала 13 управления через рычаг 25 валу 24 вращения, становится минимальным.
[0035] Следовательно, даже когда операция изучения исходного положения выполняется во время работы с высокой нагрузкой, при которой прикладывается большая нагрузка сгорания, или во время работы с высокой скоростью, при которой прикладывается большая инерционная нагрузка, представляется возможным достаточно сдерживать момент, действующий на вал 24 вращения, тем самым, подавляя шум столкновения, который может возникать вследствие касания-столкновения вала 24 вращения с поверхностью 41 стопора на стороне низкой степени сжатия, и подавляя возникновения износа и вмятины.
[0036] (4) К слову, структурно, крутящий момент вокруг вала 24 вращения, передаваемый от вала 13 управления через рычаг 25 к валу 24 вращения, имеет тенденцию уменьшаться, когда угол θ между связывающей центральной линией 25A рычага 25 (т.е. отрезок линии, соединяющий центр третьего соединительного штифта 28 и центр четвертого соединительного штифта 30) и связывающей центральной линией 29A второго плеча 29 (т.е. отрезок линии, соединяющий центр шейки 24A вала 24 вращения и центр четвертого соединительного штифта 30) уменьшается. По вышеописанной причине, в точно определенном состоянии, когда вал 13 управления, а также вал 24 вращения, был механически заблокирован в положении стопора на стороне низкой степени сжатия, вал 24 вращения располагается в предварительно определенном угловом диапазоне, содержащем точно определенное положение, в котором угол θ становится минимальным (другими словами, когда связывающая центральная линия 25A и связывающая центральная линия 29A сходятся друг с другом). Как перечислено в пункте (3), даже когда операция изучения исходного положения выполняется во время работы с высокой нагрузкой, при которой прикладывается большая нагрузка сгорания, или во время работы с высокой скоростью, при которой прикладывается большая инерционная нагрузка, представляется возможным достаточно сдерживать момент, действующий на вал 24 вращения, тем самым, подавляя шум столкновения, который может возникать вследствие касания-столкновения вала 24 вращения с поверхностью 41 стопора на стороне низкой степени сжатия, и подавляя возникновения износа и вмятины.
[0037] (5) Когда выполняется вторая операция изучения исходного положения вследствие потери фактической степени сжатия, согласно вращению вала 13 управления, а также вала 24 вращения, по направлению к исходному положению, степень сжатия двигателя изменяется. Вследствие такого изменения в степени сжатия двигателя возникает изменение (колебание) в выходном крутящем моменте двигателя. Такое состояние вероятно вызовет у пассажиров транспортного средства чувство дискомфорта. Следовательно, в показанном варианте осуществления, для того, чтобы смягчать или нейтрализовать колебание крутящего момента, вызванное изменением степени сжатия двигателя, возникающим вследствие операции изучения исходного положения, контролируются управляющие действия для фаз газораспределения, момента зажигания и/или открытия дроссельной заслонки.
[0038] (6) Конкретно, как ранее объяснено в показанном варианте осуществления, в случае, когда вал 13 управления и вал 24 вращения вращаются в направлении низкой степени сжатия посредством перемещения вала вращения по направлению к поверхности 41 стопора на стороне низкой степени сжатия, когда выполняется вторая операция изучения исходного положения, для того, чтобы смягчать или нейтрализовать падение крутящего момента, вызванное падением степени сжатия двигателя, выполняется, по меньшей мере, одно из опережения в моменте зажигания, опережения в моменте закрытия впускного клапана и увеличения открытия дроссельной заслонки. Следовательно, представляется возможным подавлять колебание крутящего момента, возникающее вследствие выполнения второй операции изучения исходного положения, тем самым, улучшая общую характеристику управляемости.
[0039] В то время как вышеприведенное является описанием предпочтительных вариантов осуществления, выполняющих изобретение, будет понятно, что изобретение не ограничивается конкретными вариантами осуществления, показанными и описанными в данном документе, и что могут быть выполнены различные изменения и модификации. Например, в качестве блока определения степени сжатия, в показанном варианте осуществления, используется датчик 31 вращения, который определяет угловое положение вала 24 вращения. Вместо этого, может быть использована другая конфигурация, такая, которая определяет угловое положение вала 13 вращения, или может быть использована дополнительная конфигурация, которая непосредственно определяет или оценивает положение поршня (положение хода) поршня 5. В показанном варианте осуществления поверхность 41 стопора на стороне низкой степени сжатия предусматривается на стороне вала 26 вращения и корпуса 26, тогда как поверхность 42 стопора на стороне высокой степени сжатия предусматривается на стороне вала 13 управления и блока 2 цилиндров. Изобретение не ограничивается этим размещение стопоров. Вместо этого, эти две поверхности стопоров могут обе быть предусмотрены на стороне вала 24 вращения и корпуса 26 или на стороне вала 13 управления и блока 2 цилиндров.
Устройство управления для двигателя внутреннего сгорания с переменной степенью сжатия снабжается механизмом переменной степени сжатия для изменения степени сжатия двигателя в соответствии с угловым положением вала управления и блоком определения степени сжатия, который определяет фактическую степень сжатия. В предварительно определенном состоянии (S11) работы двигателя, таком как непосредственно после запуска двигателя, операция изучения исходного положения для блока определения степени сжатия выполняется (S12) с валом управления, механически заблокированным в предварительно определенном исходном положении. Во время работы двигателя, даже когда фактическая степень сжатия теряется вследствие ошибки связи или т.п. (S13) или даже когда разница между фактической степенью сжатия и целевой степенью сжатия становится больше допустимого отклонения вследствие некоторых неисправностей (S14), операция изучения исходного положения немедленно выполняется (S15), тем самым, предоставляя возможность быстрого возврата в состояние, когда может быть выполнено нормальное управление степенью сжатия. 6 з.п. ф-лы, 3 ил.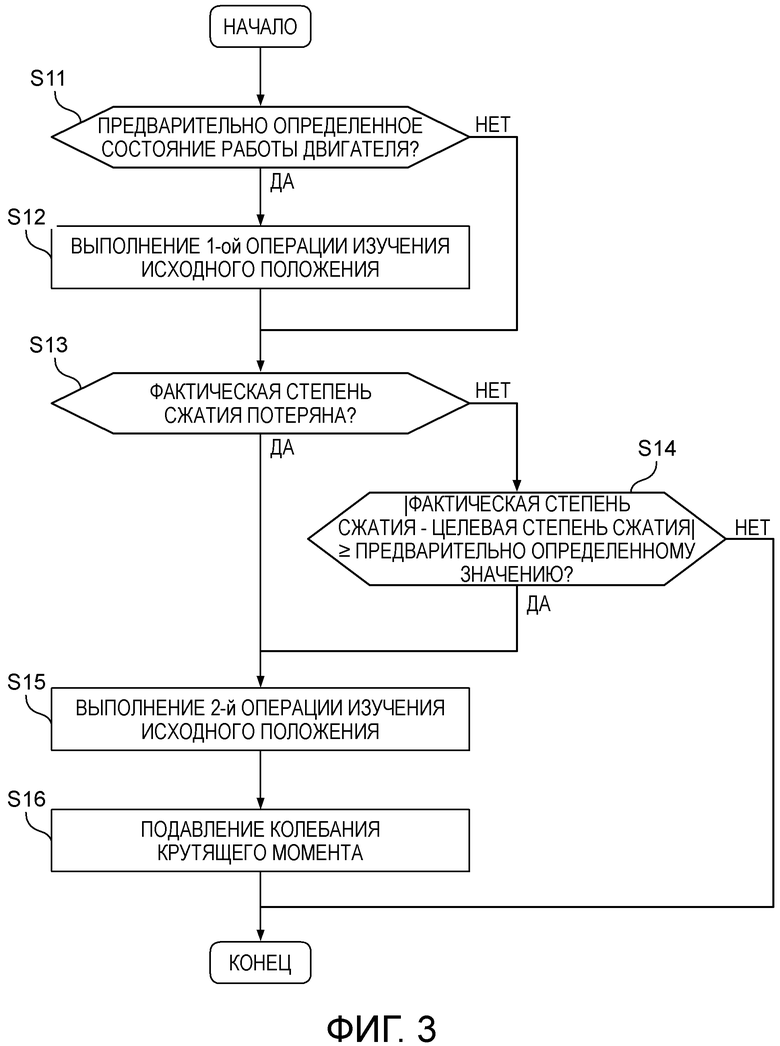
1. Устройство управления для двигателя внутреннего сгорания с переменной степенью сжатия, оснащенного механизмом переменной степени сжатия для изменения степени сжатия двигателя в соответствии с угловым положением вала управления и выполненного с возможностью управлять механизмом переменной степени сжатия до целевой степени сжатия, заданной в соответствии с состоянием работы двигателя, содержащее:
блок определения степени сжатия, который определяет фактическую степень сжатия, соответствующую фактической степени сжатия двигателя;
первое средство изучения исходного положения для выполнения операции изучения исходного положения для блока определения степени сжатия с валом управления, механически заблокированным в предварительно определенном исходном положении в предварительно определенном состоянии работы двигателя; и
второе средство изучения исходного положения для выполнения операции изучения исходного положения, во время работы двигателя, когда фактическая степень сжатия теряется или когда разница между фактической степенью сжатия и целевой степенью сжатия становится больше предварительно определенного значения.
2. Устройство управления для двигателя внутреннего сгорания с переменной степенью сжатия по п. 1, в котором:
второе средство изучения исходного положения выполнено с возможностью выполнять операцию изучения исходного положения в точно определенном состоянии, когда вал управления повернулся в сторону максимально низкой степени сжатия и заблокировался в положении стопора на стороне низкой степени сжатия.
3. Устройство управления для двигателя внутреннего сгорания с переменной степенью сжатия по п. 2, которое дополнительно содержит:
исполнительное устройство, выполненное с возможностью вращательно приводить в действие вал управления; и
механизм понижения скорости для понижения крутящего момента исполнительного устройства и для передачи мощности на пониженной скорости валу управления,
при этом механизм понижения скорости имеет вал вращения, соединенный через рычаг с валом управления, и
при этом, в точно определенном состоянии, когда вал управления, а также вал вращения, был заблокирован в положении стопора на стороне низкой степени сжатия, вал вращения располагается в предварительно определенном угловом диапазоне, содержащем угловое положение, такое, что крутящий момент вокруг вала вращения, причем этот крутящий момент передается от вала управления через рычаг валу вращения, становится минимальным.
4. Устройство управления для двигателя внутреннего сгорания с переменной степенью сжатия по п. 2, которое дополнительно содержит:
исполнительное устройство, выполненное с возможностью вращательно приводить в действие вал управления; и
механизм понижения скорости для понижения крутящего момента исполнительного устройства и для передачи мощности на пониженной скорости валу управления,
при этом механизм понижения скорости имеет вал вращения, соединенный через рычаг с валом управления,
при этом один конец рычага соединяется с возможностью вращения с верхним концом первого плеча, протягивающегося радиально от вала управления, в то время как другой конец рычага соединяется с возможностью вращения с верхним концом второго плеча, протягивающегося радиально от вала вращения, и
при этом, в точно определенном состоянии, когда вал управления, а также вал вращения, был заблокирован в положении стопора на стороне низкой степени сжатия, вал вращения располагается в предварительно определенном угловом диапазоне, содержащем такое положение, что угол между связывающей центральной линией рычага и связывающей центральной линией второго плеча становится минимальным.
5. Устройство управления для двигателя внутреннего сгорания с переменной степенью сжатия по любому из предшествующих пп. 1-4, которое дополнительно содержит:
механизм регулирования фаз газораспределения, который изменяет хронирование впускного клапана или выпускного клапана;
свечу зажигания, которая зажигает искрой воздушно-топливную смесь, подаваемую в камеру сгорания;
электронно-управляемую дроссельную заслонку, которая открывает и закрывает канал всасываемого воздуха; и
средство подавления колебания крутящего момента для управления, по меньшей мере, одним из фаз газораспределения, момента зажигания свечи зажигания и открытия дроссельной заслонки для электронно-управляемой дроссельной заслонки, для того, чтобы смягчать изменение крутящего момента, вызванное изменением степени сжатия двигателя, возникающим вследствие операции изучения исходного положения, выполняемой вторым средством изучения исходного положения.
6. Устройство управления для двигателя внутреннего сгорания с переменной степенью сжатия по п. 2, которое дополнительно содержит:
механизм регулирования фаз газораспределения, который изменяет фазы газораспределения для впускного клапана или выпускного клапана;
свечу зажигания, которая зажигает искрой воздушно-топливную смесь, подаваемую в камеру сгорания;
электронно-управляемую дроссельную заслонку, которая открывает и закрывает канал всасываемого воздуха; и
средство подавления колебания крутящего момента для управления, по меньшей мере, одним из опережения в моменте закрытия впускного клапана, опережения в моменте зажигания свечи зажигания и увеличения в открытии дроссельной заслонки для электронно-управляемой дроссельной заслонки, для того, чтобы смягчать падение крутящего момента, вызванное падением степени сжатия двигателя, возникающим вследствие операции изучения исходного положения, выполняемой вторым средством изучения исходного положения.
7. Устройство управления для двигателя внутреннего сгорания с переменной степенью сжатия по пп. 1, 2, 3, 4 или 6, в котором:
механизм переменной степени сжатия содержит:
нижнее звено, установленное с возможностью вращения на шатунную шейку коленчатого вала;
верхнее звено, которое соединяет нижнее звено и поршень двигателя внутреннего сгорания; и
звено управления, которое соединяет вал управления и нижнее звено.
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ЗАЖИГАНИЕМ ИСКРОВОГО ТИПА | 2007 |
|
RU2404368C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2211933C2 |
| JP 2013253512 A, 19.12.2013 | |||
| US 20130306035 A1, 21.11.2013 | |||
| US 7506620 B2, 24.03.2009. | |||

