Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к двигателю внутреннего сгорания, оснащенному механизмом регулирования степени сжатия для регулируемого управления степенью сжатия двигателя внутреннего сгорания.
Уровень техники
[0002] Общеизвестен двигатель внутреннего сгорания, оснащенный механизмом регулирования степени сжатия, в котором степень сжатия двигателя внутреннего сгорания регулируемо управляется оптимально в зависимости от рабочего состояния двигателя внутреннего сгорания в целях повышения термической эффективности поршневого двигателя внутреннего сгорания и недопущения анормального сгорания, такого как детонация и т.п. Например, двигатели внутреннего сгорания, оснащенные механизмом регулирования степени сжатия, который состоит из многозвенного поршневого кривошипно-шатунного механизма, раскрыты в патентных документах 1 и 2.
[0003] Вышеприведенный механизм регулирования степени сжатия содержит множество промежуточных тяг, через которые поршень и коленчатый вал связываются вместе, и управляющую тягу для ограничения степени свободы этих промежуточных тяг. Также предусмотрено исполнительное устройство для изменения позиции вращения управляющего вала. Относительная позиция поршня может быть вертикально смещена посредством изменения позиции вращения управляющего вала и посредством перемещения точки опоры колебательного движения управляющей тяги посредством исполнительного устройства, за счет этого изменяя степень сжатия.
[0004] В общем, в этом виде механизма регулирования степени сжатия, в целях предотвращения ситуаций, когда степень сжатия становится чрезмерно высокой степенью сжатия или чрезмерно низкой степенью сжатия, определенный тип стопоров зачастую предоставляется для ограничения перемещения поршневого кривошипно-шатунного механизма и для механического ограничения регулируемого диапазона степени сжатия.
[0005] Тем не менее, при условии, что электромотор, служащий в качестве исполнительного устройства, пытается дополнительно продолжать изменять степень сжатия даже после ограничения посредством стопора, например, вследствие неисправности (анормальности) в контроллере, который управляет электромотором, к каждой составной части может нежелательно прикладываться чрезмерная нагрузка.
Список библиографических ссылок
Патентные документы
[0006] Патентный документ 1. Предварительная публикация патента (Япония) № JP2010-151088
Патентный документ 2. Предварительная публикация патента (Япония) № JP2014-238027
Сущность изобретения
[0007] Двигатель внутреннего сгорания с переменной степенью сжатия изобретения содержит:
механизм регулирования степени сжатия, в котором степень механического сжатия двигателя внутреннего сгорания изменяется в соответствии с позицией вращения элемента управления степенью сжатия, вращающегося посредством исполнительного устройства;
механический рычажный механизм, включающий в себя плечо, смонтированное на ведущем валу исполнительного устройства для передачи вращательного движения ведущего вала, при преобразовании вращательного движения ведущего вала во вращательное движение элемента управления степенью сжатия;
датчик для определения позиции вращения ведущего вала в качестве параметра, соответствующего степени сжатия; и
по меньшей мере, один стопор для ограничения перемещения элемента управления степенью сжатия или перемещения рычажного механизма в позиции, соответствующей верхней предельной степени сжатия или нижней предельной степени сжатия.
[0008] Также предусмотрен контроллер, выполненный с возможностью выполнять диагностику, на основе определенного значения датчика в состоянии, в котором элемент управления степенью сжатия или рычажный механизм ограничивается посредством стопора, в отношении того, присутствует или нет относительное вращение смонтированного участка плеча относительно ведущего вала.
[0009] При вышеприведенной конфигурации, допустим, что электромотор пытается дополнительно продолжать изменять степень сжатия даже после ограничения посредством стопора, например, вследствие неисправности в контроллере. В таком случае, возникает относительное вращение между плечом и ведущим валом. Вследствие возникновения относительного вращения, взаимосвязь между определенным значением датчика и степенью сжатия становится ненадлежащей. В этом изобретении, выполняется самодиагностика касательно присутствия или отсутствия вышеуказанного относительного вращения.
[0010] Согласно изобретению, когда возникает относительное вращение между плечом и ведущим валом, можно безусловно определять относительное вращение.
Краткое описание чертежей
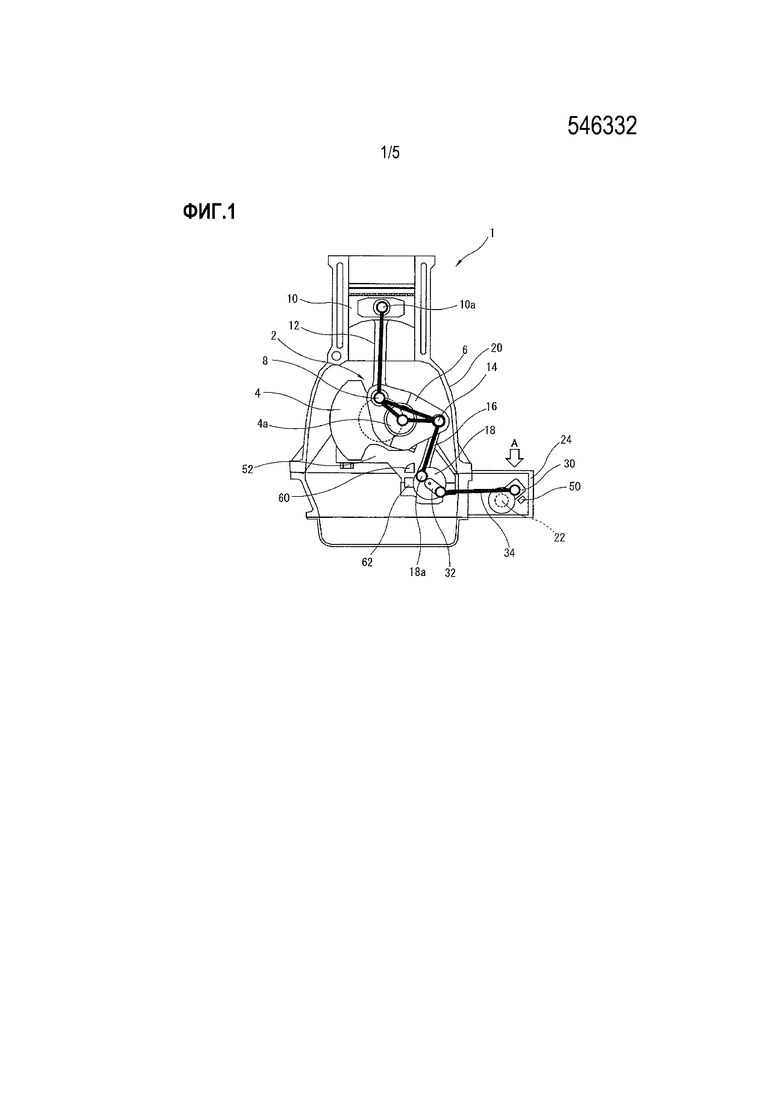
[0011] Фиг. 1 является видом в сечении, схематично иллюстрирующим двигатель внутреннего сгорания с переменной степенью сжатия, оснащенный многозвенным механизмом регулирования степени сжатия.
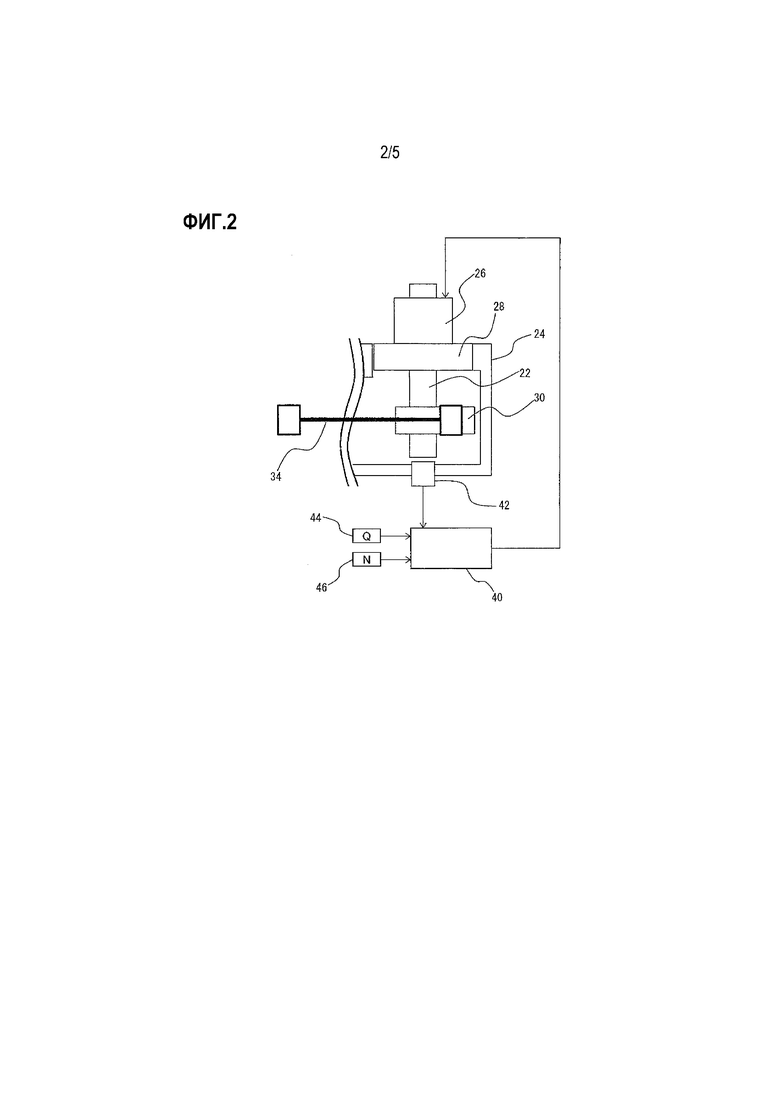
Фиг. 2 является видом в направлении стрелки A по фиг. 1.
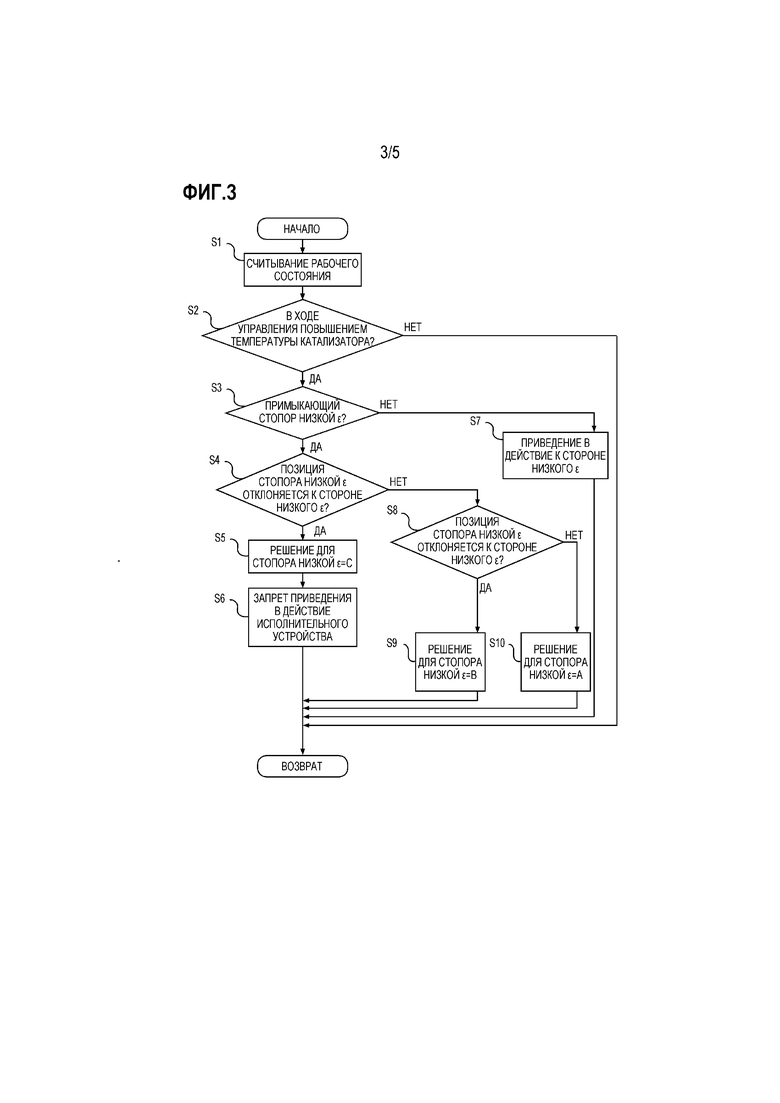
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей обработку диагностики для диагностики относительного вращения ведущего вала с использованием стопора на стороне низкой степени сжатия.
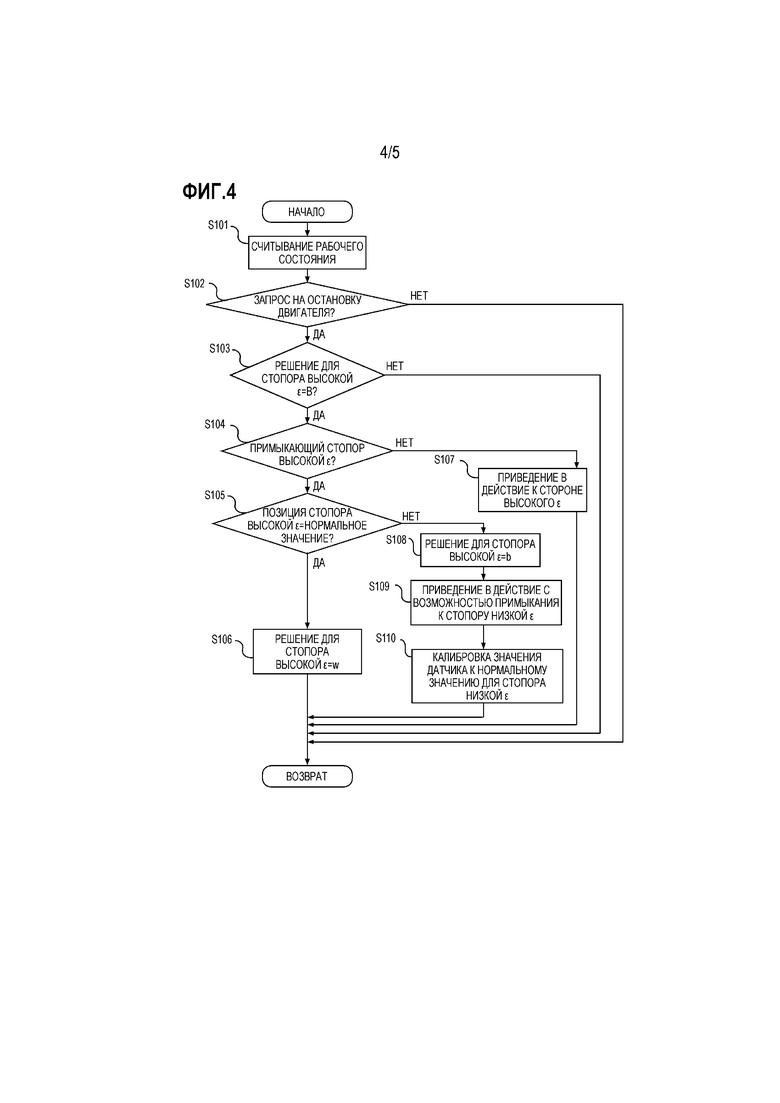
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей обработку диагностики для диагностики относительного вращения ведущего вала с использованием стопора на стороне высокой степени сжатия.
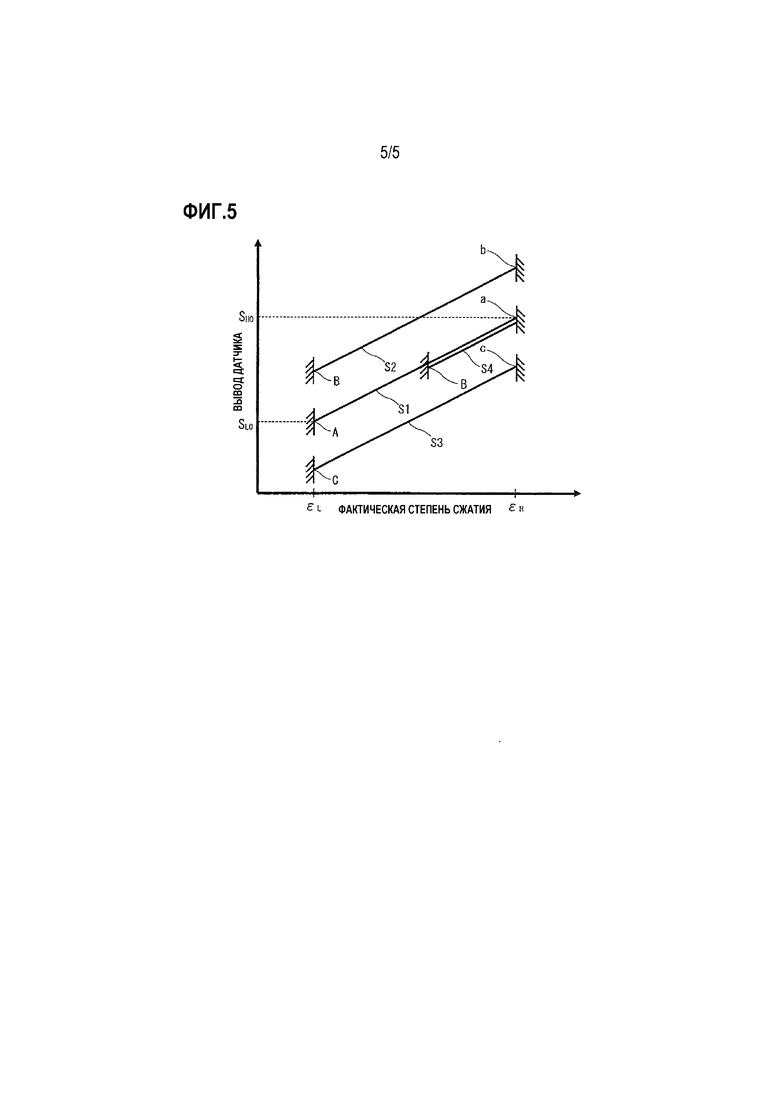
Фиг. 5 является графиком, иллюстрирующим взаимосвязь между выводом датчика и фактической степенью сжатия.
Подробное описание вариантов осуществления
[0012] Далее подробно поясняются варианты осуществления настоящего изобретения со ссылкой на чертежи.
[0013] Как показано на фиг. 1, двигатель 1 внутреннего сгорания с переменной степенью сжатия оснащен механизмом 2 регулирования степени сжатия, который использует известный многозвенный поршневой кривошипно-шатунный механизм. Механизм 2 регулирования степени сжатия в основном состоит из нижней тяги 6, верхней тяги 12, управляющей тяги 16 и управляющего вала 18. Нижняя тяга 6 поддерживается с возможностью вращения на пальце 4a кривошипа коленчатого вала 4. Верхняя тяга 12 сцепляет верхний палец 8, расположенный на одном конце нижней тяги 6, и поршневой палец 10a поршня 10 между собой. Один конец управляющей тяги 16 сцепляется с управляющим пальцем 14, расположенным на другом конце нижней тяги 6. Управляющий вал 18 поддерживает с возможностью качания другой конец управляющей тяги 16. Коленчатый вал 4 и управляющий вал 18 поддерживаются с возможностью вращения посредством соответствующих несущих конструкций (не показаны) в картере, который является нижней секцией блока 20 цилиндров.
[0014] Управляющий вал 18 имеет участок 18a эксцентрикового вала, позиция которого может быть смещена или изменена в соответствии с вращательным движением управляющего вала 18. Другой конец управляющей тяги 16 входит с возможностью вращения в участок 18a эксцентрикового вала. В механизме 2 регулирования степени сжатия, позиция верхней мертвой точки (TDC – top dead center) поршня 10 вертикально смещена в соответствии с вращательным движением управляющего вала 18, за счет этого изменяя степень механического сжатия. Другими словами, в этом варианте осуществления, управляющий вал 18 соответствует элементу управления степенью сжатия. Следовательно, степень механического сжатия может однозначно определяться в соответствии с позицией вращения управляющего вала 18, соответствующего элементу управления степенью сжатия.
[0015] В качестве приводного механизма, который регулируемо управляет степенью сжатия механизма 2 регулирования степени сжатия, т.е. позицией вращения управляющего вала 18, исполнительное устройство 24 расположено в нижней части блока 20 цилиндров. Исполнительно устройство имеет ведущий вал 22, параллельный коленчатому валу 4. Как показано на фиг. 2, исполнительное устройство 24 состоит из электромотора 26, который служит в качестве основного корпуса исполнительного устройства, и редуктора 28, который уменьшает вращение выходного вала электромотора 26 и выводит выходную мощность с уменьшенной скоростью через ведущий вал 28. Электромотор 26 и редуктор 28 соединяются и размещаются последовательно. Ведущий вал 22 выполнен с возможностью вращаться в предписанном диапазоне углов из угловой позиции, соответствующей низкой степени сжатия, в угловую позицию, соответствующую высокой степени сжатия. Ведущий вал 22 и управляющий вал 18 позиционируются параллельно друг другу. Чтобы разрешать ведущему валу и управляющему валу вращаться в сочетании друг с другом, первое плечо 30, запрессованное на ведущем валу 22, и второе плечо 32, закрепленное на управляющем валу 18, сцепляются между собой через промежуточную тягу 34.
[0016] Когда ведущий вал 22 исполнительного устройства 24 вращается, вращательное движение передается из первого плеча 30 через промежуточную тягу 34 во второе плечо 32, и ввиду этого управляющий вал 18 вращается. За счет этого, как пояснено выше, изменяется степень механического сжатия двигателя 1 внутреннего сгорания. Таким образом, в этом варианте осуществления, первое плечо 30, второе плечо 32 и промежуточная тяга 34 соответствуют механическому рычажному механизму, который передает вращательное движение ведущего вала 22 при преобразовании вращательного движения ведущего вала во вращательное движение управляющего вала 18. Кроме того, в показанном варианте осуществления, механизм тяги используется в качестве механического рычажного механизма. Вместо этого, может использоваться другой тип рычажного механизма.
[0017] Целевая степень сжатия механизма 2 регулирования степени сжатия задается в зависимости от рабочего состояния двигателя (например, требуемой нагрузки и частоты вращения двигателя) в контроллере 40. Исполнительно устройство 24, т.е. электромотор 26 приводится в действие и управляется таким образом, чтобы реализовывать целевую степень сжатия. Позиция вращения ведущего вала 22, соответствующая фактической степени механического сжатия, определяется посредством датчика 42 фактической степени сжатия. Управление с обратной связью для электромотора 26 выполняется таким образом, чтобы переводить определенную фактическую степень сжатия к целевой степени сжатия. Датчик 42 фактической степени сжатия представляет собой бесконтактный датчик, который выполнен с возможностью располагаться напротив верхнего конца ведущего вала 22. Датчик фактической степени сжатия предоставляется для того, чтобы определять и считывать угловую позицию определенного объекта (не показан), состоящего из постоянного магнита, встроенного в верхнюю торцевую поверхность ведущего вала 22, и выводить определенное значение в контроллер 40. Контроллер 40 выполнен с возможностью приводить в действие и управлять исполнительным устройством 24 на основе этого определенного значения.
[0018] В дополнение к сигналу из датчика 42 фактической степени сжатия, сигналы из других датчиков, а именно, расходомера 44 воздуха для определения объема Q всасываемого воздуха, датчика 46 угла поворота коленчатого вала для определения частоты N вращения двигателя и т.п. вводятся в контроллер 40. Контроллер 40 также выполнен с возможностью оптимально управлять степенью сжатия на основе этих определенных входных информационных сигналов данных.
[0019] В качестве тенденции базового управления степенью сжатия, высокая целевая степень сжатия задается на стороне низкой нагрузки в целях повышения термической эффективности, тогда как низкая целевая степень сжатия задается на стороне высокой нагрузки в целях недопущения детонации.
[0020] Чтобы механически ограничивать регулируемый диапазон степени сжатия посредством механизма 2 регулирования степени сжатия, двигатель 1 внутреннего сгорания имеет стопор 50 на стороне низкой степени сжатия для ограничения чрезмерного вращения управляющего вала 18 в сторону низкой степени сжатия и стопор 60 на стороне высокой степени сжатия для ограничения чрезмерного вращения управляющего вала 18 в сторону высокой степени сжатия.
[0021] Стопор 50 на стороне низкой степени сжатия формируется таким образом, что он выступает внутри корпуса исполнительного устройства 24, так что первое плечо 30 переводится в прилегающий контакт со стопором на стороне низкой степени сжатия в позиции, соответствующей нижней предельной степени сжатия. Следовательно, когда ведущий вал 22 вращается в позицию, соответствующую нижней предельной степени сжатия, первое плечо 30 примыкает к стопору 50 на стороне низкой степени сжатия, так что ведущий вал 22 и ввиду этого управляющий вал 18 ограничиваются таким образом, что они не вращаются дальше в сторону низкой степени сжатия. Таким образом, нижний предел степени сжатия ограничен в позиции, в которой стопор 50 низкой степени сжатия и первое плечо 30 примыкают друг к другу.
[0022] С другой стороны, стопор 60 на стороне высокой степени сжатия формируется таким образом, что он выступает из элемента (например, крышки 52 подшипника), который составляет подшипник для управляющего вала 18 в позиции, соответствующей верхней предельной степени сжатия. Выступающий участок 62 предоставляется в предварительно определенной позиции управляющего вала 18 таким образом, что выступающий участок может переводиться в прилегающий контакт со стопором 60 на стороне высокой степени сжатия. Следовательно, когда ведущий вал 22 вращается в позицию, соответствующую верхней предельной степени сжатия, выступающий участок 62 примыкает к стопору 60 на стороне высокой степени сжатия, так что управляющий вал 18 и ввиду этого ведущий вал 22 ограничиваются таким образом, что они не вращаются дальше в сторону высокой степени сжатия. Таким образом, верхний предел степени сжатия ограничен в позиции, в которой стопор 60 на стороне высокой степени сжатия и выступающий участок 62 примыкают друг к другу.
[0023] Таким образом, стопор 50 на стороне низкой степени сжатия и стопор 60 на стороне высокой степени сжатия служат для того, чтобы устанавливать предел или ограничивать перемещение рычажного механизма между позицией, соответствующей нижней предельной степени сжатия, и позицией, соответствующей верхней предельной степени сжатия. В результате этого, степень сжатия варьируется только между нижней предельной степенью сжатия и верхней предельной степенью сжатия.
[0024] Кроме того, в показанном варианте осуществления, стопор 50 на стороне низкой степени сжатия предоставляется в исполнительном устройстве 24, тогда как стопор 60 на стороне высокой степени сжатия предоставляется на стороне основного корпуса двигателя 1 внутреннего сгорания. Следует понимать, что позиции стопоров 50, 60 не ограничены конкретными вариантами осуществления, показанными и описанными в данном документе, и эти стопоры могут размещаться в соответствующих произвольных позициях, в которых может ограничиваться вращательное движение первого плеча 30 и вращательное движение управляющего вала 18. Например, стопор на стороне низкой степени сжатия и стопор на стороне высокой степени сжатия могут позиционироваться или предоставляться в исполнительном устройстве 24. Вместо этого, эти стопоры могут позиционироваться или предоставляться на стороне основного корпуса двигателя 1 внутреннего сгорания.
[0025] В показанном варианте осуществления, первое плечо 30 и ведущий вал 22 имеют такую конфигурацию, в которой относительное вращение между ними разрешается посредством чрезмерного крутящего момента. Конкретно, первое плечо 30 запрессовывается на ведущем валу 22 с предварительно установленным натягом, соответствующим целевому верхнему предельному крутящему моменту. Следовательно, когда прикладывается крутящий момент, превышающий верхний предельный крутящий момент, возникает относительное вращение между первым плечом 30 и ведущим валом 22. Кроме того, запрессованный участок подшипника первого плеча 30 может быть сконфигурирован как раздельный тип, в котором запрессованный участок подшипника разделяется на две половины подшипника, и ввиду этого эти две половины закрепляются между собой с помощью винтов.
[0026] Допустим, что электромотор 26 пытается дополнительно продолжать изменять степень сжатия даже после ограничения посредством стопоров 50, 60, например, вследствие неисправности (анормальности) в контроллере 40, который управляет электромотором 26, и ввиду этого ведущий вал 22 продолжает вращение. В таком случае, чрезмерная нагрузка прикладывается к каждой составной части рычажного механизма, идущего из первого плеча 30 в управляющий вал 18. В показанном варианте осуществления, даже в случае, если ведущий вал 22 дальше продолжает вращение после ограничения посредством стопоров 50, 60, относительное вращение между первым плечом 30 и ведущим валом 22 возникает сразу после того, как прикладывается крутящий момент, превышающий верхний предельный крутящий момент. Следовательно, возникает меньшая чрезмерная нагрузка, прикладываемая к другим частям рычажного механизма, отличным от вышеприведенного смонтированного участка (запрессованного участка подшипника).
[0027] Кроме того, в случае конфигурации, как пояснено выше, имеется вероятность того, что возникает относительное вращение между вышеуказанными элементами нежелательно ввиду чрезмерного входного крутящего момента, вызываемого посредством фактора, отличного от неисправности в контроллере 40. Когда возникает этот вид относительного вращения, степень сжатия не может управляться нормально. Следовательно, в показанном варианте осуществления, контроллер 40 дополнительно выполнен с возможностью диагностировать то, присутствует или нет относительное вращение.
[0028] В дальнейшем в этом документе поясняется со ссылкой на фиг. 3 и 4 диагностика касательно присутствия или отсутствия относительного вращения ведущего вала 22. Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей обработку диагностики для диагностики относительного вращения ведущего вала 22 с использованием стопора 50 на стороне низкой степени сжатия, тогда как фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей обработку диагностики для диагностики относительного вращения ведущего вала 22 с использованием стопора 60 на стороне высокой степени сжатия. В показанном варианте осуществления, диагностика с использованием стопора 50 на стороне низкой степени сжатия и диагностика с использованием стопора 60 на стороне высокой степени сжатия выполняются параллельно друг с другом.
[0029] Диагностика, показанная на фиг. 3, с использованием стопора 50 на стороне низкой степени сжатия выполняется в ходе управления повышением температуры катализатора сразу после того, как двигатель 1 внутреннего сгорания запускается из холодного состояния.
[0030] На этапе S1, считывается рабочее состояние двигателя внутреннего сгорания. Затем, процедура переходит к этапу S2. На этапе S2, выполняется проверка с тем, чтобы определять то, работает или нет управление повышением температуры катализатора. Когда управление повышением температуры катализатора работает, процедура переходит к этапу S3. С другой стороны, когда управление повышением температуры катализатора не работает, процедура завершается.
[0031] На этапе S3, выполняется проверка с тем, чтобы определять то, примыкает или нет первое плечо 30 к стопору 50 на стороне низкой степени сжатия (сокращенно - "стопору низкой ε"). Когда первое плечо 30 не примыкает к стопору 50 на стороне низкой степени сжатия, процедура переходит к этапу S7. На этапе S7, ведущий вал 22 вращается в сторону низкой степени сжатия (сторону низкого ε) посредством исполнительного устройства 24. На основе многократного выполнения этапов S3 и S7, исполнительное устройство 24 приводится в действие до такого времени, когда первое плечо 30 переводится в прилегающий контакт со стопором 50 на стороне низкой степени сжатия. Например, определение относительно того, примыкает или нет первое плечо 30 к стопору 50 на стороне низкой степени сжатия, выполняется посредством изменения электрического тока электромотора 26. Сразу после того, как первое плечо 30 переводится в прилегающий контакт со стопором 50 на стороне низкой степени сжатия, процедура переходит к этапу S4.
[0032] На этапе S4, выполняется проверка с тем, чтобы определять то, является или нет определенное значение датчика 42 фактической степени сжатия значением стороны низкой степени сжатия ниже нормального значения на стороне низкой степени сжатия (опорного значения, соответствующего нижней предельной степени сжатия). Когда первое плечо 30 переведено в прилегающий контакт со стопором 50 на стороне низкой степени сжатия, и не присутствует анормальность, такая как вышеприведенное относительное вращение, позиция вращения ведущего вала 22, соответствующая нижней предельной степени сжатия, выводится в качестве определенного значения датчика 42 фактической степени сжатия. С другой стороны, когда присутствует относительное вращение ведущего вала 22 по отношению к первому плечу 30 к стороне низкой степени сжатия, определенное значение датчика 42 фактической степени сжатия становится или отклоняется к значению стороны низкой степени сжатия. Таким образом, когда определенное значение датчика 42 фактической степени сжатия отклоняется к значению стороны низкой степени сжатия, процедура переходит к этапу S5. На этапе S5, значение принятия решения для стопора 50 на стороне низкой степени сжатия задается равным "C", и затем процедура переходит к этапу S6.
[0033] На этапе S6, приведение в действие исполнительного устройства 24 прекращается (запрещается), и затем процедура завершается. Кроме того, управляющий вал 18 и ввиду этого первое плечо 30 постоянно смещаются к стороне низкой степени сжатия на основе нагрузки давления в цилиндрах, и за счет этого, по существу, отсутствует отклонение ведущего вала 22 в сторону низкой степени сжатия. Следовательно, когда выведено определенное значение, которое отклоняется к значению стороны низкой степени сжатия, определяется то, что анормальное определенное значение является результатом неисправности (анормальности) в контроллере 40, и после этого исполнительное устройство 24 останавливается.
[0034] Напротив, когда этап S4 определяет то, что определенное значение датчика 42 фактической степени сжатия не отклоняется к значению стороны низкой степени сжатия, процедура переходит к этапу S8. На этапе S8, выполняется проверка с тем, чтобы определять то, является или нет определенное значение датчика 42 фактической степени сжатия значением стороны высокой степени сжатия выше вышеприведенного нормального значения. Когда определенное значение датчика 42 фактической степени сжатия отклоняется к значению стороны высокой степени сжатия, процедура переходит к этапу S9. На этапе S9, значение принятия решения для стопора 50 на стороне низкой степени сжатия задается равным "B", и затем процедура завершается.
[0035] С другой стороны, когда этап S8 определяет то, что определенное значение датчика 42 фактической степени сжатия не отклоняется к значению стороны высокой степени сжатия, процедура переходит к этапу S10. На этапе S10, значение принятия решения для стопора 50 на стороне низкой степени сжатия задается равным "A" (т.е. "нормальность"), и затем процедура завершается.
[0036] В дальнейшем в этом документе поясняется диагностика касательно относительного вращения ведущего вала 22 с использованием стопора 60 на стороне высокой степени сжатия со ссылкой на фиг. 4. Диагностика с использованием стопора 60 на стороне высокой степени сжатия выполняется во время обработки остановки двигателя 1 внутреннего сгорания.
[0037] На этапе S101, считывается рабочее состояние двигателя внутреннего сгорания. Затем процедура переходит к этапу S102. На этапе S102, выполняется проверка с тем, чтобы определять то, присутствует или нет запрос на остановку двигателя. Когда запрос на остановку двигателя присутствует, процедура переходит к этапу S103. С другой стороны, когда запрос на остановку двигателя не присутствует, процедура завершается.
[0038] На этапе S103, выполняется проверка с тем, чтобы определять то, составляет или нет значение принятия решения для стопора 50 на стороне низкой степени сжатия "B" (другими словами, определенное значение в состоянии прилегающего контакта со стопором 50 на стороне низкой степени сжатия отклоняется к стороне высокой степени сжатия). Когда значение принятия решения составляет "B", процедура переходит к этапу S104. С другой стороны, когда значение принятия решения не составляет "B", процедура завершается.
[0039] На этапе S104, выполняется проверка с тем, чтобы определять то, примыкает или нет выступающий участок 62 к стопору 60 на стороне высокой степени сжатия (сокращенно - "стопору высокой ε"). Когда выступающий участок 62 не примыкает к стопору 60 на стороне высокой степени сжатия, процедура переходит к этапу S107. На этапе S107, ведущий вал 22 приводится в действие и вращается в сторону высокой степени сжатия (сторону высокого ε) посредством исполнительного устройства 24. На основе многократного выполнения этапов S104 и S107, исполнительное устройство 24 приводится в действие до такого времени, когда выступающий участок 62 переводится в прилегающий контакт со стопором 60 на стороне высокой степени сжатия. Сразу после того, как выступающий участок 62 переводится в прилегающий контакт со стопором 60 на стороне высокой степени сжатия, процедура переходит к этапу S105.
[0040] На этапе S105, выполняется проверка с тем, чтобы определять то, является или нет определенное значение датчика 42 фактической степени сжатия нормальным значением на стороне высокой степени сжатия (опорным значением, соответствующим верхней предельной степени сжатия). Когда определенное значение датчика 42 фактической степени сжатия является нормальным значением, процедура переходит к этапу S106. На этапе S106, значение принятия решения для стопора 60 на стороне высокой степени сжатия задается равным "a" (т.е. "нормальность"), и затем процедура завершается. Вследствие этого, случай, в котором значение принятия решения для стопора 60 на стороне высокой степени сжатия составляет "a", означает то, что диапазон степени сжатия ограничен вследствие постороннего вещества, застрявшего или зацепившегося на управляющем валу 18 и т.п., при условии, что значение принятия решения для стопора 50 на стороне низкой степени сжатия составляет "B", другими словами, определенное значение, отклоняется к стороне высокой степени сжатия (см. выходную характеристику S4 датчика по фиг. 5, как описано ниже).
[0041] Напротив, когда этап S105 определяет то, что определенное значение датчика 42 фактической степени сжатия не является нормальным значением, процедура переходит к этапу S108. На этапе S108, значение принятия решения для стопора 60 на стороне высокой степени сжатия задается равным "b", и затем процедура переходит к этапу S109. На этапе S109, исполнительное устройство 24 приводится в действие до такого времени, когда первое плечо 30 переводится в прилегающий контакт со стопором 50 на стороне низкой степени сжатия. Затем процедура переходит к этапу S110. На этапе S110, определенное значение датчика 42 фактической степени сжатия (выходное значение датчика) калибруется или корректируется до нормального значения на стороне низкой степени сжатия для стопора 50 на стороне низкой степени сжатия, и затем процедура завершается. Случай, в котором значение принятия решения для стопора 50 на стороне низкой степени сжатия составляет "B", и значение принятия решения для стопора 60 на стороне высокой степени сжатия составляет "b", означает то, что возникает относительное вращение ведущего вала 22 по отношению к первому плечу 30 к стороне высокой степени сжатия (см. выходную характеристику S2 датчика по фиг. 5). Когда осуществляется вышеуказанное относительное вращение, возникает разность между выводом датчика (определенным значением датчика) и фактической степенью сжатия, и ввиду этого коррекция вышеуказанной разности обеспечивает дальнейшее точное управление.
[0042] Таким образом, согласно варианту осуществления, первое плечо 30 и управляющий вал 18 принудительно перемещаются в ограничительную позицию на стороне низкой степени сжатия и ограничительную позицию на стороне высокой степени сжатия, ограниченные посредством стопора 50 на стороне низкой степени сжатия и стопора 60 на стороне высокой степени сжатия, соответственно, и затем диагностика касательно присутствия или отсутствия относительного вращения ведущего вала 22 может быть проведена на основе решения, принимаемого из определенного значения датчика 42 фактической степени сжатия в каждой из ограничительной позиции на стороне низкой степени сжатия и ограничительной позиции на стороне высокой степени сжатия. Одновременно, можно отличать вышеуказанное относительное вращение от других анормальностей, когда диапазон степени сжатия ограничен.
[0043] Ссылаясь на фиг. 5, показан график, иллюстрирующий характеристику вывода S датчика 42 фактической степени сжатия при любой фактической степени сжатия.
[0044] На графике, характеристика S1 указывает нормальный случай, в котором значение принятия решения для стопора 50 на стороне низкой степени сжатия составляет "A", и значение принятия решения для стопора 60 на стороне высокой степени сжатия составляет "a", и ввиду этого определенное значение SL датчика 42 фактической степени сжатия для нижней предельной степени εL сжатия становится идентичным опорному значению SL0, и определенное значение SH датчика 42 фактической степени сжатия для верхней предельной степени εH сжатия становится идентичным опорному значению SH0.
[0045] Характеристика S2 указывает случай, в котором значение принятия решения для стопора 50 на стороне низкой степени сжатия составляет "B", и значение принятия решения для стопора 60 на стороне высокой степени сжатия составляет "b", и ввиду этого определенное значение SL датчика 42 фактической степени сжатия для нижней предельной степени εL сжатия становится выше опорного значения SL0, и определенное значение SH датчика 42 фактической степени сжатия для верхней предельной степени εH сжатия становится выше опорного значения SH0. Это указывает или означает возникновение относительного вращения ведущего вала 22 по отношению к первому плечу 30 к стороне высокой степени сжатия. В этом случае, определенное значение SL калибруется или корректируется до нормального значения SL0. Кроме того, даже когда осуществляется вышеуказанное относительное вращение, диапазон самого изменения степени сжатия не изменяется, и ввиду этого калибровка или коррекция для ошибки (отклонения), соответствующей относительному вращению, обеспечивает нормальное определение для всего диапазона степени сжатия.
[0046] Характеристика S3 указывает случай, в котором значение принятия решения для стопора 50 на стороне низкой степени сжатия составляет "C", и ввиду этого значение принятия решения для стопора 60 на стороне высокой степени сжатия составляет "c", и ввиду этого определенное значение SL датчика 42 фактической степени сжатия для нижней предельной степени εL сжатия становится ниже опорного значения SL0, и определенное значение SH датчика 42 фактической степени сжатия для верхней предельной степени εH сжатия становится ниже опорного значения SH0. Как пояснено выше, на основе нагрузки давления в цилиндрах, отсутствует возникновение относительного вращения в этом направлении (т.е. к стороне низкой степени сжатия). Следовательно, определяется то, что возникает некоторая анормальность (некоторая неисправность) (см. этап S6).
[0047] Характеристика S4 указывает случай, в котором значение принятия решения для стопора 50 на стороне низкой степени сжатия составляет "B", и значение принятия решения для стопора 60 на стороне высокой степени сжатия составляет "a", и ввиду этого определенное значение SL для нижней предельной степени εL сжатия становится выше опорного значения SL0, тогда как определенное значение SH для верхней предельной степени εH сжатия становится идентичным опорному значению SH0. Это указывает или означает то, что как указано посредством чертежа, диапазон фактической степени сжатия ограничен вследствие постороннего вещества, застрявшего или зацепившегося на управляющем валу 18 и т.п. Соответственно, в этом случае, калибровка или коррекция не выполняется для выходного значения датчика. После этого, например, режим работы переключается на отказоустойчивый режим.
[0048] Согласно вышеприведенному варианту осуществления, первое плечо 30 и ведущий вал 22 имеют такую конфигурацию, в которой относительное вращение между ними разрешается. Следовательно, можно предотвращать приложение чрезмерной нагрузки к каждой составной части рычажного механизма и безусловно определять относительное вращение. Кроме того, посредством проведения диагностики касательно относительного вращения с использованием стопора 60 на стороне высокой степени сжатия, а также стопора 50 на стороне низкой степени сжатия, можно отличать вышеуказанное относительное вращение (см. характеристику S2 по фиг. 5) от других анормальностей (см. характеристику S4 по фиг. 5), когда диапазон степени сжатия ограничен.
[0049] С одной стороны, в случае диагностики с использованием стопора 50 на стороне низкой степени сжатия, возникает меньший риск детонации. Посредством выполнения вышеуказанной диагностики, в частности, во время разогрева катализатора после того, как двигатель запускается из холодного состояния, можно минимизировать ухудшение экономии топлива, возникающее в результате диагностики. С другой стороны, стопор 60 на стороне высокой степени сжатия, в общем, изготавливается с высокой точностью, и ввиду этого можно повышать точность диагностики посредством выполнения диагностики с использованием стопора 60 на стороне высокой степени сжатия. В случае диагностики с использованием стопора 60 на стороне высокой степени сжатия, возникает риск детонации, но в показанном варианте осуществления, диагностика выполняется во время обработки остановки, например, после остановки двигателя 1 внутреннего сгорания, и ввиду этого означенное представляет собой незначительную проблему.
[0050] Кроме того, в показанном варианте осуществления, диагностика с использованием стопора 50 на стороне низкой степени сжатия (см. фиг. 3) и диагностика с использованием стопора 60 на стороне высокой степени сжатия (см. фиг. 4) выполняются параллельно друг с другом. Вместо этого, может выполняться любая из этих двух диагностик. В этом случае, если определена некоторая анормальность, исполнительное устройство 24 останавливается, и затем процедура завершается.
[0051] Кроме того, в показанном варианте осуществления, значение принятия решения для стороны низкой степени сжатия, заданное как "нормальность" (то есть, "A"), рассматривается в качестве случая, в котором отсутствует возникновение относительного вращения, и ввиду этого диагностика касательно относительного вращения с использованием стопора 60 на стороне высокой степени сжатия опускается. Вместо этого, чтобы более безусловно диагностировать относительное вращение, даже в случае, если значение принятия решения задается равным "A", диагностика касательно относительного вращения с использованием стопора 60 на стороне высокой степени сжатия может выполняться параллельно.
[0052] Кроме того, в показанном варианте осуществления, когда значение принятия решения для стороны низкой степени сжатия составляет "C", выполняется такое определение, что возникает некоторая анормальность. Вместо этого, может выполняться такое определение, что возникает относительное вращение к стороне низкой степени сжатия.
Настоящее изобретение относится к двигателю внутреннего сгорания, оснащенному механизмом регулирования степени сжатия. Двигатель (1) внутреннего сгорания с переменной степенью сжатия содержит механизм (2) регулирования степени сжатия, в котором степень механического сжатия двигателя (1) внутреннего сгорания изменяется в соответствии с позицией вращения управляющего вала (18), стопор (50) на стороне низкой степени сжатия, стопор (60) на стороне высокой степени сжатия, датчик (42) для определения позиции вращения ведущего вала (22) исполнительного устройства (24) и плечо (30), запрессованное на ведущем валу (22). Относительное вращение между плечом (30) и ведущим валом (22) возникает, когда прикладывается крутящий момент, превышающий верхний предельный крутящий момент. Ведущий вал (22) или управляющий вал (18) принудительно перемещается в ограничительные позиции, ограниченные посредством соответствующих стопоров (50, 60), и затем диагностика касательно присутствия или отсутствия относительного вращения выполняется на основе определенных значений в соответствующих ограничительных позициях. Техническим результатом является улучшение экономии топлива и повышение точности диагностики. 6 з.п. ф-лы, 5 ил.
1. Двигатель внутреннего сгорания с переменной степенью сжатия, содержащий
механизм регулирования степени сжатия, в котором степень механического сжатия двигателя внутреннего сгорания изменяется в соответствии с позицией вращения элемента управления степенью сжатия, вращающегося посредством исполнительного устройства;
механический рычажный механизм, включающий в себя плечо, смонтированное на ведущем валу исполнительного устройства для передачи вращательного движения ведущего вала, при преобразовании вращательного движения ведущего вала во вращательное движение элемента управления степенью сжатия;
датчик для определения позиции вращения ведущего вала в качестве параметра, соответствующего степени сжатия; и
по меньшей мере, один стопор для ограничения перемещения элемента управления степенью сжатия или перемещения рычажного механизма в позиции, соответствующей верхней предельной степени сжатия или нижней предельной степени сжатия,
при этом контроллер предоставляется для выполнения диагностики, на основе определенного значения датчика в состоянии, в котором элемент управления степенью сжатия или рычажный механизм ограничивается посредством стопора, в отношении того, присутствует или нет относительное вращение смонтированного участка плеча относительно ведущего вала.
2. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 1, в котором
стопор предоставляется в позиции, соответствующей нижней предельной степени сжатия; и
контроллер выполнен с возможностью побуждать элемент управления степенью сжатия и рычажный механизм перемещаться в ограничительную позицию, ограниченную посредством стопора, и затем выполнять диагностику.
3. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 2, в котором контроллер выполнен с возможностью осуществлять диагностику во время разогрева катализатора после того, как двигатель запускается из холодного состояния.
4. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 1, в котором
стопор предоставляется в позиции, соответствующей верхней предельной степени сжатия; и
контроллер выполнен с возможностью осуществлять перемещение элемента управления степенью сжатия и рычажного механизма в ограничительную позицию, ограниченную посредством стопора, и затем выполнять диагностику.
5. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 4, в котором контроллер выполнен с возможностью осуществлять перемещение в ограничительную позицию и диагностику после прекращения работы двигателя внутреннего сгорания.
6. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 1, в котором
по меньшей мере, один стопор содержит стопор, предоставленный в позиции, соответствующей верхней предельной степени сжатия, и стопор, предоставленный в позиции, соответствующей нижней предельной степени сжатия; и
контроллер выполнен с возможностью побуждать элемент управления степенью сжатия и рычажный механизм перемещаться в ограничительные позиции, ограниченные посредством соответствующих стопоров, и затем отличать относительное вращение от других анормальностей на основе определенных значений датчика в соответствующих ограничительных позициях.
7. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 6, в котором контроллер выполнен с возможностью разрешать калибровку определенного значения датчика, когда выполняется такое определение, что возникает относительное вращение.
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ МНОГОТОПЛИВНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ МЕТОДОМ ИЗМЕНЕНИЯ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ И РАБОЧЕГО ОБЪЕМА ЦИЛИНДРОВ И МНОГОТОПЛИВНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2119077C1 |
| КАЧАЮЩИЙСЯ МЕХАНИЗМ ДЛЯ ПОРШНЕВЫХ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2339827C2 |
| JP 2012251446 A, 20.12.2012 | |||
| JP 2006226133 A, 31.08.2006 | |||
| JP 2014238027 A, 18.12.2014. | |||

