Область техники
Настоящее изобретение относится к устройству управления для двигателя внутреннего сгорания с переменной степенью сжатия, оснащенного механизмом переменной степени сжатия, который может изменять степень сжатия двигателя в соответствии с угловым положением вала управления.
Уровень техники
В публикации JP 2013-253512 раскрыт двигатель внутреннего сгорания (далее в данном документе называемый "двигателем внутреннего сгорания с переменной степенью сжатия"), оснащенный механизмом переменной степени сжатия, приспособленным изменять степень сжатия двигателя в соответствии с угловым положением вала управления. Механизм понижения скорости предусматривается между валом управления и приводным средством, таким как мотор, которое приводит во вращение вал управления. Вал вращения, который соединяется через рычаг с валом управления, предусматривается в механизме понижения скорости. Например, вал вращения поддерживается с возможностью вращения в корпусе, прикрепленном к корпусу двигателя.
Техническая задача
В таком двигателе внутреннего сгорания с переменной степенью сжатия часть регулирования на стороне высокой степени сжатия и часть регулирования на стороне низкой степени сжатия предусматриваются в корпусе, который поддерживает с возможностью вращения вал вращения, для механического регулирования диапазона возможности вращения вала вращения между стороной высокой степени сжатия и стороной низкой степени сжатия. Также операция изучения исходного положения степени сжатия выполняется на основе сигнала обнаружения от датчика вращения, который определяет угловое положение вала вращения, в состоянии, когда угловое положение вала вращения было отрегулировано и спозиционировано механическим образом посредством любой из этих двух частей регулирования.
Однако части регулирования и датчик вращения предусматриваются в одном и том же корпусе, и, таким образом, существует вероятность, что точность определения датчика вращения ухудшается вследствие вибраций, деформации и т.п., возникающих, когда вал вращения сталкивается с поверхностью стопора каждой из частей регулирования, таким образом, приводя в результате к ухудшению точности изучения исходного положения для степени сжатия.
Следовательно, ввиду ранее описанных обстоятельств целью настоящего изобретения является улучшение точности изучения исходного положения степени сжатия в двигателе внутреннего сгорания с переменной степенью сжатия, снабженном механизмом переменной степени сжатия.
Решение проблемы
Двигатель внутреннего сгорания с переменной степенью сжатия настоящего изобретения включает в себя вал управления, поддерживаемый с возможностью вращения посредством корпуса двигателя, механизм переменной степени сжатия для изменения степени сжатия двигателя в соответствии с угловым положением вала управления, приводное средство, которое приводит во вращение вал управления, и механизм понижения скорости для понижения крутящего момента приводного средства и для передачи мощности на пониженной скорости валу управления. Механизм понижения скорости имеет вал вращения, поддерживаемый с возможностью вращения в корпусе, прикрепленном к корпусу двигателя, и рычаг, который соединяет вал вращения и вал управления.
Двигатель внутреннего сгорания с переменной степенью сжатия имеет первую часть регулирования, расположенную в корпусе двигателя для механического регулирования вала управления в позицию максимального поворота на одной стороне из стороны низкой степени сжатия и стороны высокой степени сжатия, и вторую часть регулирования, расположенную в корпусе для механического регулирования вала вращения в позицию максимального поворота на другой стороне из стороны низкой степени сжатия и стороны высокой степени сжатия.
Первая часть регулирования конфигурируется, чтобы регулировать вал управления в позицию максимального поворота на стороне высокой степени сжатия, тогда как вторая часть регулирования конфигурируется, чтобы регулировать вал вращения в позицию максимального поворота на стороне низкой степени сжатия.
Предпочтительно, двигатель внутреннего сгорания с переменной степенью сжатия имеет датчик вращения для определения углового положения одного вала из вала управления и вала вращения и средство изучения исходного положения для выполнения операции изучения исходного положения степени сжатия, на основе сигнала обнаружения от датчика вращения, в состоянии, когда другой вал из вала управления и вала вращения был механически отрегулирован посредством либо первой части регулирования, либо второй части регулирования.
Полезные результаты изобретения
Согласно настоящему изобретению первая часть регулирования и вторая часть регулирования располагаются индивидуально на стороне корпуса двигателя, где устанавливается вал управления, и на стороне корпуса, где устанавливается вал вращения для регулирования диапазона способности вращения между стороной высокой степени сжатия и стороной низкой степени сжатия. Следовательно, степень свободы в компоновке является высокой. Например, когда выполняется операция изучения исходного положения степени сжатия посредством использования датчика вращения, представляется возможным пресекать ухудшение в точности определения датчика вращения посредством приведения либо вала управления, либо вала вращения в механически отрегулированное состояние посредством части регулирования, которая не снабжена датчиком вращения, таким образом, улучшая точность изучения исходного положения степени сжатия.
Краткое описание чертежей
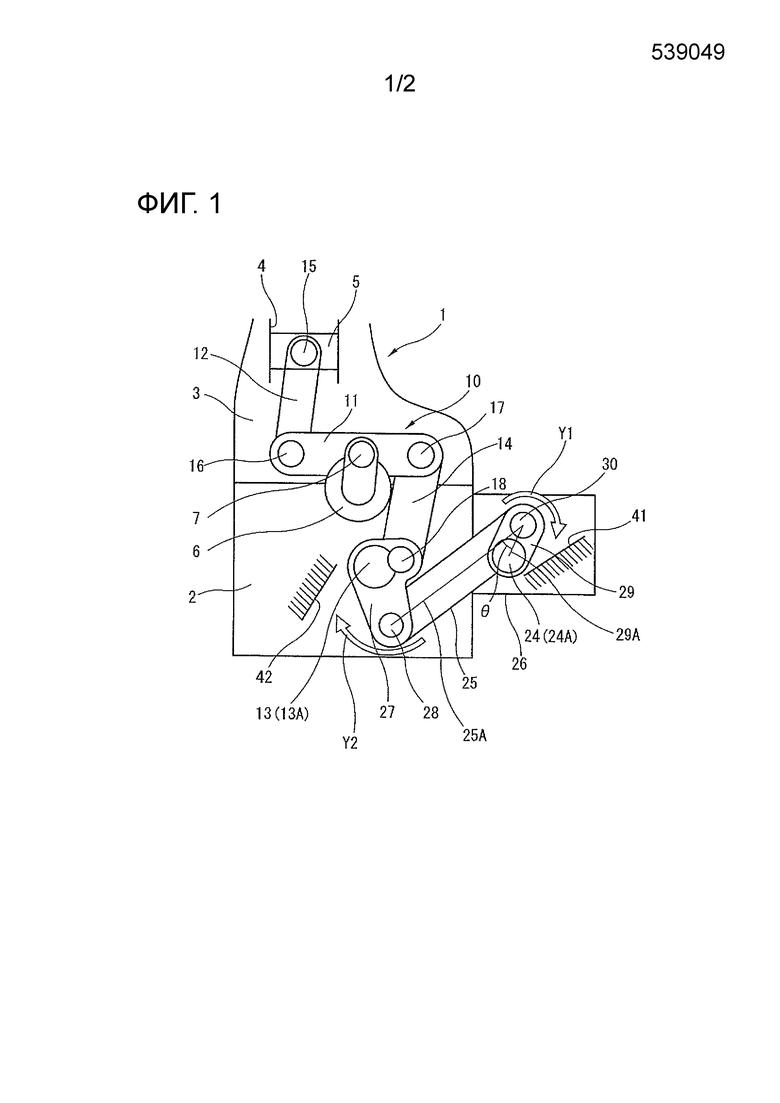
Фиг. 1 - чертеж, схематично иллюстрирующий конфигурацию устройства управления для двигателя внутреннего сгорания с переменной степенью сжатия, оснащенного механизмом переменной степени сжатия, в одном варианте осуществления, к которому изобретение применяется; и
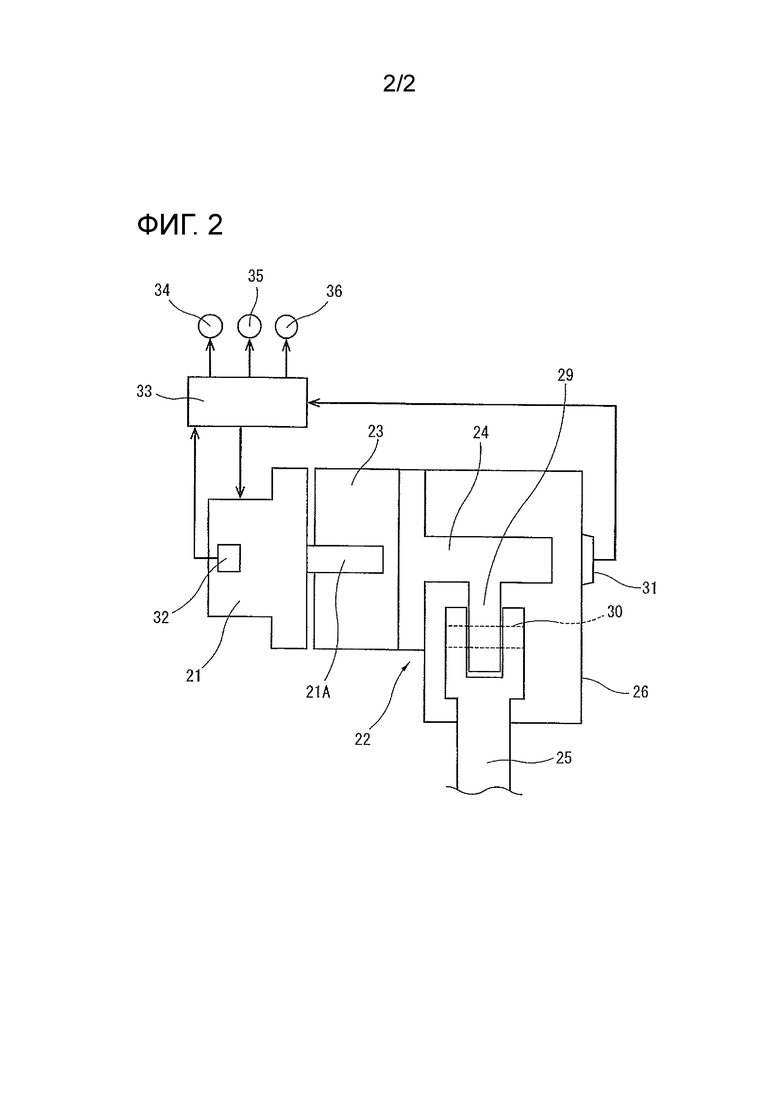
Фиг. 2 - чертеж, схематично иллюстрирующий конфигурацию устройства управления для двигателя внутреннего сгорания с переменной степенью сжатия варианта осуществления.
Описание вариантов осуществления изобретения
Далее в данном документе со ссылкой на фиг. 1-2 объясняется устройство управления для двигателя 1 внутреннего сгорания с переменной степенью сжатия, оснащенного механизмом 10 переменной степени сжатия в одном варианте осуществления согласно настоящему изобретению.
Как показано на фиг. 1, двигатель 1 внутреннего сгорания с переменной степенью сжатия, главным образом, конструируется посредством блока 2 цилиндров, служащего в качестве основной части двигателя, и головки 3 цилиндров, прикрепленной на блок 2 цилиндров. Поршень 5 поднимаемым образом (скользящим образом) вставлен в цилиндр 4 головки 3 цилиндров.
Механизм 10 переменной степени сжатия имеет нижнее звено 11, верхнее звено 12, вал 13 управления и звено 14 управления. Нижнее звено устанавливается с возможностью вращения на шатунную шейку 7 коленчатого вала 6. Верхнее звено конфигурируется так, чтобы соединять нижнее звено 11 и поршень 5. Вал управления поддерживается с возможностью вращения на блоке 2 цилиндров. Звено управления конфигурируется так, чтобы соединять вал 13 управления и нижнее звено 11. Верхний конец верхнего звена 12 и поршень 5 соединяются друг с другом посредством поршневого пальца 15 так, чтобы предоставлять возможность относительного вращения между ними. Верхнее звено 12 и нижнее звено 11 соединяются друг с другом посредством первого соединительного штифта 16 так, чтобы предоставлять возможность относительного вращения между ними. Нижнее звено 11 и верхний конец звена 14 управления соединяются друг с другом посредством второго соединительного штифта 17 так, чтобы разрешать относительное вращение между ними. Нижний конец нижнего звена 11 устанавливается с возможностью вращения на эксцентриковый вал 18 управления, предусмотренный эксцентрически по отношению к шейке 13A, служащей в качестве центра вращения вала 13 управления.
Как показано на фиг. 2, механизм 22 понижения скорости вращения вставляется на пути передачи мощности между валом 13 управления и выходным валом 21A мотора 21, служащего в качестве приводного средства, который приводит во вращение вал 13 управления, для уменьшения крутящего момента выходного вала 21A мотора 21 и для передачи мощности с пониженной скоростью валу 13 управления. Механизм 22 понижения скорости имеет редуктор 23 скорости, такой как передаточное устройство с волнообразным движением, которое обеспечивает высокие передаточные числа, вал 24 вращения, который вращается как одно целое с выходным валом редуктора 23 скорости, и рычаг 25, сконфигурированный, чтобы соединять вал 24 вращения и вал 13 управления (см. фиг. 1). Вал 24 вращения приспосабливается и размещается внутри корпуса 26, неподвижно соединенного и расположенного бок о бок с блоком 2 цилиндров. Вал вращения поддерживается с возможностью вращения внутри корпуса 26 и размещается параллельно валу 13 управления. Рычаг 25 структурируется, чтобы протягиваться через щели блока 2 цилиндров и корпуса 26.
Один конец рычага 25 и верхний конец первого плеча 27, протягивающегося радиально от шейки 13A вала 13 управления, соединяются друг с другом посредством третьего соединительного штифта 28, так, чтобы предоставлять возможность относительного вращения между ними. Другой конец рычага 25 и верхний конец второго плеча 29, протягивающегося радиально от шейки 24A, служащей в качестве центра вращения вала 24 вращения, соединяются друг с другом посредством четвертого соединительного штифта 30, так, чтобы предоставлять возможность относительного вращения между ними.
В механизме 10 переменной степени сжатия, сконструированном, как обсуждено выше, когда угловое положение вала 13 управления изменяется посредством мотора 21 через механизм 22 понижения скорости, возникает изменение в угловом пространственном положении нижнего звена 11 и, таким образом, возникает изменение в характеристике хода поршня 5, включающего в себя положение верхней мертвой точки (ВМТ) поршня и положение нижней мертвой точки (НМТ) поршня. Таким образом, степень сжатия двигателя постоянно изменяется.
Как показано на фиг. 2, в качестве блока определения степени сжатия, который определяет фактическую степень сжатия, которая является фактической степенью сжатия двигателя, датчик 31 вращения устанавливается на корпус 26 для определения углового положения вала 24 вращения, соответствующего фактической степени сжатия, т.е. исходного положения степени сжатия. Также датчик 32 определения скорости мотора устанавливается на мотор 21 для определения скорости мотора.
Блок 33 управления является цифровой компьютерной системой, приспособленной хранить и исполнять различные управляющие процессы. Блок управления конфигурируется, чтобы выводить управляющие сигналы различным приводным средствам на основе состояния работы двигателя, определенного посредством датчиков 31, 32 и т.п., для управления целиком соответствующими операциями этих приводных средств. Конкретно, блок управления конфигурируется, чтобы управлять приводом механизма 34 регулирования фаз газораспределения, приспособленным изменять синхронизацию впускного клапана (или синхронизацию выпускного клапана) для управления моментом открытия впускного клапана (IVO) и моментом закрытия впускного клапана (IVC). Также блок управления конфигурируется, чтобы управлять приведением в действие свечи 35 зажигания, которая зажигает искрой воздушно-топливную смесь в камере сгорания, для управления моментом зажигания. Кроме того, блок управления конфигурируется, чтобы управлять приводом электронно-управляемой дроссельной заслонки 36, которая открывает или закрывает канал всасываемого воздуха, для управления открытием дроссельной заслонки.
Дополнительно, блок 33 управления конфигурируется, чтобы задавать целевую степень сжатия на основе состояний работы двигателя и регулировать с обратной связью работу мотора 21 для поддержания отклонения между целевой степенью сжатия и фактической степенью сжатия, определенной посредством датчика 31 вращения, настолько малым, насколько возможно.
Как схематично показано на фиг. 1, диапазон возможности вращения каждого из вала 13 управления и вала 24 вращения, оба связаны вместе таким способом, чтобы вращаться совместно друг с другом, механически регулируется или ограничивается посредством поверхности 41 стопора на стороне низкой степени сжатия, служащей в качестве части регулирования на стороне низкой степени сжатия, и поверхности 42 стопора на стороне высокой степени сжатия, служащей в качестве части регулирования на стороне высокой степени сжатия. Например, в показанном варианте осуществления, поверхность 41 стопора на стороне низкой степени сжатия предусматривается внутри корпуса 26. Когда вал 24 вращения поворачивается в сторону максимально низкой степени сжатия (т.е. в направлении, указанном стрелкой "Y1" на фиг. 1), боковая поверхность второго плеча 29 приводится в упорный контакт с поверхностью 41 стопора на стороне низкой степени сжатия. Следовательно, вал 13 управления и вал 24 вращения структурируются, чтобы механически блокироваться и регулироваться в позиции стопора на стороне низкой степени сжатия. С другой стороны, поверхность 42 стопора на стороне высокой степени сжатия предусматривается внутри блока 2 цилиндров. Когда вал 13 управления поворачивается в сторону максимально высокой степени сжатия (т.е. в направлении, указанном стрелкой "Y2" на фиг. 1), боковая поверхность первого плеча 27 приводится в упорный контакт с поверхностью 42 стопора на стороне высокой степени сжатия. Следовательно, вал 13 управления и вал 24 вращения также структурируются, чтобы механически блокироваться и регулироваться в позиции стопора на стороне высокой степени сжатия.
Когда заданное условие работы двигателя для выполнения операции инициализации для датчика 31 вращения удовлетворяется (например, непосредственно после запуска двигателя или непосредственно перед остановкой двигателя), выполняется операция инициализации. В этой операции инициализации, например, в состоянии, когда, с валом 24 вращения в упорном контакте с поверхностью 42 стопора на стороне высокой степени сжатия, вал 13 управления был механически отрегулирован и заблокирован в положении стопора на стороне высокой степени сжатия, служащем в качестве исходного положения, обнаруженное значение датчика 31 вращения, соответствующее фактической степени сжатия, изучается и инициализируется в заданное первоначальное значение, соответствующее исходному положению степени сжатия. Посредством операции изучения и инициализации отношение соответствия между фактическим угловым положением каждого из вала 13 управления и вала 24 вращения и фактической степенью сжатия, определенной посредством датчика 31 вращения, может быть сброшено в первоначальное нормальное состояние.
Указанная конфигурация варианта осуществления и ее работа и результаты перечисляются ниже в данном документе.
(1) Двигатель внутреннего сгорания с переменной степенью сжатия имеет поверхность 42 стопора на стороне высокой степени сжатия, расположенную в блоке 2 цилиндров (служащем в качестве корпуса двигателя) и служащую в качестве первой части регулирования (первой структуры регулирования) для механического регулирования вала 13 управления в положение максимального поворота на одной стороне из стороны низкой степени сжатия и стороны высокой степени сжатия, и поверхность 41 стопора на стороне низкой степени сжатия, расположенную в корпусе 26 и служащую в качестве второй части регулирования (второй структуры регулирования) для механического регулирования вала 24 вращения в положение максимального поворота на другой стороне из стороны низкой степени сжатия и стороны высокой степени сжатия. Таким образом, поверхность 42 стопора на стороне высокой степени сжатия и поверхность 41 стопора на стороне низкой степени сжатия располагаются индивидуально на стороне вала 13 управления и на стороне вала 24 вращения, таким образом, увеличивая степень свободы в компоновке. Как описано позже, когда выполняется операция изучения исходного положения степени сжатия, первый вал из вала 13 управления и вала 24 вращения, первый вал оснащается датчиком 31 вращения, и другой вал из вала управления и вала вращения, другой вал конфигурируется так, что угловое положение другого вала механически регулируется посредством либо поверхности 41 стопора, либо поверхности 42 стопора, могут отличаться друг от друга. Следовательно, представляется возможным выполнять операцию изучения без влияния вибраций и деформации, вызванных упором-зацеплением другого вала с поверхностью стопора, таким образом, улучшая точность определения во время операции изучения.
(2) В показанном варианте осуществления поверхность 42 стопора на стороне высокой степени сжатия, служащая в качестве первой части регулирования, конфигурируется, чтобы регулировать вал 13 управления в положение максимального поворота на стороне высокой степени сжатия, тогда как поверхность 41 стопора на стороне низкой степени сжатия, служащая в качестве второй части регулирования, конфигурируется, чтобы регулировать вал 24 вращения в положение максимального поворота на стороне низкой степени сжатия. Т.е. когда выполняется операция изучения, шум столкновения, вызванный столкновением с поверхностью стопора, может быть уменьшен через поддон картера корпуса двигателя посредством механического регулирования вала 13 управления посредством поверхности 42 стопора на стороне высокой степени сжатия, предусмотренной на стороне корпуса двигателя, по сравнению с действием регулирования на стороне корпуса. Это способствует подавлению шума столкновения во время операции изучения. Операция изучения выполняется или инициируется приведением вала в упорный контакт только с одной из поверхностей 41, 42 стопора, таким образом, сокращая время изучения.
(3) Датчик 31 вращения предусматривается для определения углового положения одного вала из вала 13 управления и вала 24 вращения. Операция изучения исходного положения степени сжатия выполняется, на основе сигнала обнаружения от датчика 31 вращения, в состоянии, когда другой вал из вала 13 управления и вала 24 вращения был механически отрегулирован посредством либо первой части регулирования, либо второй части регулирования. Как обсуждалось выше, когда выполняется операция изучения исходного положения степени сжатия, первый вал из вала 13 управления и вала 24 вращения, первый вал оснащается датчиком 31 вращения, и другой вал из вала управления и вала вращения, другой вал конфигурируется так, что угловое положение другого вала механически регулируется посредством либо поверхности 41 стопора, либо поверхности 42 стопора, могут отличаться друг от друга. Следовательно, представляется возможным выполнять операцию изучения без влияния вибраций и деформации, вызванных упором-зацеплением другого вала с поверхностью 41 стопора или поверхностью 42 стопора, таким образом, улучшая точность определения во время операции изучения.
(4) Также, в показанном варианте осуществления, датчик 31 вращения конфигурируется, чтобы определять угловое положение вала 24 вращения. Операция изучения углового положения степени сжатия выполняется, на основе сигнала обнаружения от датчика вращения, в состоянии, когда вал 13 управления был механически отрегулирован посредством поверхности 42 стопора на стороне высокой степени сжатия.
На стороне высокой степени сжатия отклонение в степени сжатия относительно угла поворота вала 13 управления является большим. Следовательно, выполняя операцию изучения на стороне высокой степени сжатия, на которой требуется очень точное управление высокой степенью сжатия, представляется возможным улучшать точность управления на стороне высокой степени сжатия. Таким образом, представляется возможным пресекать возникновение детонации на стороне высокой степени сжатия. Дополнительно, представляется возможным предохранять клапаны и поршень от чрезмерного приближения друг к другу, даже на стороне высокой степени сжатия, на которой клапаны и поршень имеют тенденцию приближаться друг к другу.
Также двигатель внутреннего сгорания с переменным сжатием конфигурируется так, что угловое положение вала 24 вращения определяется посредством датчика 31 вращения, в то же время регулируя угловое положение на стороне вала 13 управления. Таким образом, индивидуальные различия в длине звена, отверстии для вала, зазоре соединительного штифта и т.п. на пути передачи мощности между валом 13 управления и валом 24 вращения могут быть устранены или смягчены, тем самым, улучшая точность управления.
Кроме того, во время работы при самой низкой степени сжатия, при которой прикладывается максимальная нагрузка, для того чтобы уменьшать поддерживающий степень сжатия крутящий момент мотора 21, представляется эффективным увеличивать (предпочтительно, максимизировать) передаточное отношение между валом 13 управления и валом 24 вращения. Предположим, что поверхность стопора на стороне низкой степени сжатия устанавливается на стороне вала 13 управления, чрезмерный крутящий момент мотора, усиленный вследствие чрезмерного передаточного отношения, имеет тенденцию действовать на поверхность стопора на стороне низкой степени сжатия. Это может приводить в результате к износу и поломке поверхности стопора на стороне низкой степени сжатия. В показанном варианте осуществления поверхность 41 стопора на стороне низкой степени сжатия предусматривается на стороне вала 24 вращения. Следовательно, существует меньшая тенденция для того, чтобы чрезмерный крутящий момент, умноженный на передаточное число, прикладывался к поверхности 41 стопора, и, таким образом, представляется возможным защищать поверхность 41 стопора на стороне низкой степени сжатия.
(5) Вал 24 вращения устанавливается так, что вал 24 вращения позиционируется в заданном угловом диапазоне, содержащем такое угловое положение, что крутящий момент вокруг вала вращения, причем этот крутящий момент передается от вала 13 управления через рычаг 25 к валу 24 вращения, становится минимальным в состоянии, когда вал 24 вращения был механически отрегулирован посредством поверхности 41 стопора на стороне низкой степени сжатия. Структурно, крутящий момент вокруг вала 24 вращения, передаваемый от вала 13 управления через рычаг 25 к валу 24 вращения, имеет тенденцию уменьшаться, когда угол θ между связывающей центральной линией 25A рычага 25 (т.е. отрезок линии, соединяющий центр третьего соединительного штифта 28 и центр четвертого соединительного штифта 30) и связывающей центральной линией 29A звена второго плеча 29 (т.е. отрезок линии, соединяющий центр шейки 24A вала 24 вращения и центр четвертого соединительного штифта 30) уменьшается. Следовательно, по вышеописанной причине, в состоянии, когда вал 13 управления, также как и вал 24 вращения, был механически заблокирован в положении стопора на стороне низкой степени сжатия, вал 24 вращения устанавливается так, что вал 24 вращения позиционируется в заданном угловом диапазоне, содержащем точно определенное положение, в котором угол θ становится минимальным (другими словами, когда связывающая центральная линия 25A и связывающая центральная линия 29A звена сходятся друг с другом).
Таким образом, даже когда управление с нормальной степенью сжатия становится желательным по некоторой причине во время работы с высокой нагрузкой, при которой прикладывается большая нагрузка сгорания, или во время работы с высокой скоростью, при которой прикладывается большая инерционная нагрузка, после уменьшения до степени сжатия в положении стопора на стороне низкой степени сжатия посредством давления сгорания, представляется возможным устойчиво удерживать или поддерживать состояние низкой степени сжатия в положении стопора на стороне низкой степени сжатия, в то же время подавляя крутящий момент, прикладываемый от вала 13 управления к валу 24 вращения. Дополнительно, даже когда варьирующийся крутящий момент прикладывается от вала 13 управления к валу 24 вращения, представляется возможным уменьшать столкновение вала 24 вращения с поверхностью 41 стопора на стороне низкой степени сжатия, таким образом, подавляя шум столкновения, вызванный контактом при столкновении, и, следовательно, пресекать возникновения износа и вмятины.
(6) Точность поверхности для поверхности стопора на стороне высокой степени сжатия задается более высокой, чем точность поверхности для поверхности стопора на стороне низкой степени сжатия. Следовательно, представляется возможным снижать точность поверхности для поверхности 41 стопора на стороне низкой степени сжатия, в то же время обеспечивая точность поверхности для поверхности 42 стопора на стороне высокой степени сжатия, используемой для управления изучением. Например, окончательная обработка поверхности для поверхности 41 стопора на стороне низкой степени сжатия может быть исключена, тем самым, улучшая выход продукции вследствие сокращения производственных человеко-часов и допуская более низкие затраты.
Изобретение относится к устройству управления для двигателя внутреннего сгорания с переменной степенью сжатия. Двигатель внутреннего сгорания с переменной степенью сжатия включает в себя вал (13) управления, поддерживаемый с возможностью вращения посредством корпуса двигателя, механизм (10) переменной степени сжатия для изменения степени сжатия двигателя в соответствии с угловым положением вала (13) управления, приводное средство (21), которое приводит во вращение вал (13) управления, и механизм (22) понижения скорости для понижения крутящего момента приводного средства (21) и для передачи мощности на пониженной скорости валу (13) управления. Механизм (22) понижения скорости имеет вал (24) вращения, поддерживаемый с возможностью вращения в корпусе (26), прикрепленном к корпусу двигателя, и рычаг (25), который соединяет вал (24) вращения и вал (13) управления. В корпусе двигателя размещается первая часть (42) регулирования для механического регулирования вала (13) управления в положение максимального поворота на одной стороне из стороны низкой степени сжатия и стороны высокой степени сжатия. Также в корпусе (26) размещается вторая часть (41) регулирования для механического регулирования вала (24) вращения в положение максимального поворота на другой стороне из стороны низкой степени сжатия и стороны высокой степени сжатия. 6 з.п. ф-лы, 2 ил.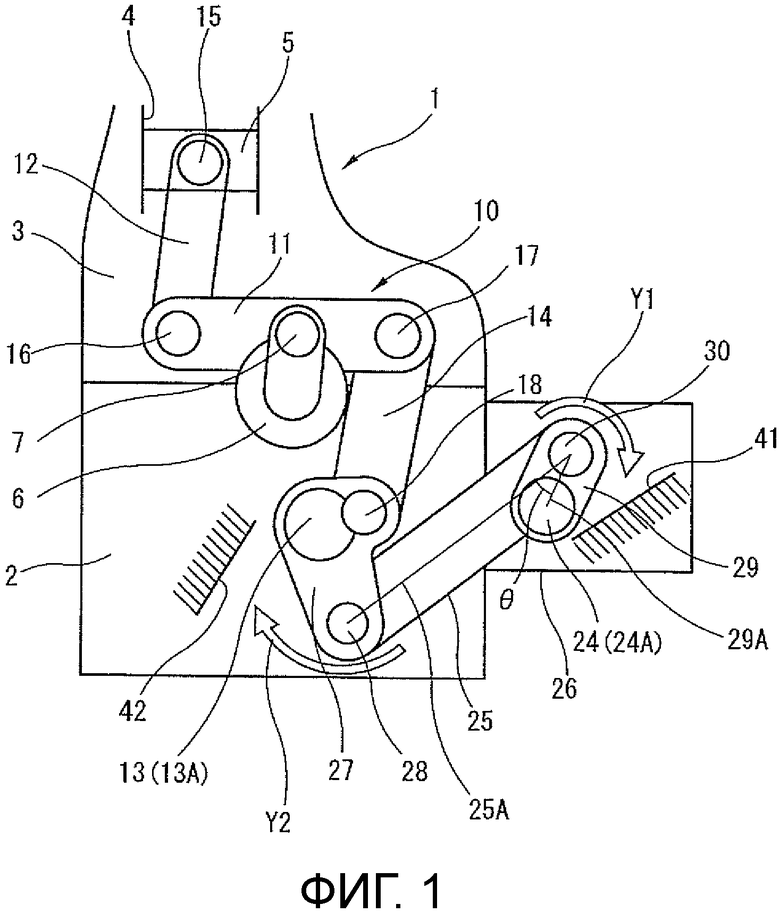
1. Двигатель внутреннего сгорания с переменной степенью сжатия, включающий в себя вал управления, поддерживаемый с возможностью вращения корпусом двигателя, механизм переменной степени сжатия для изменения степени сжатия двигателя в соответствии с угловым положением вала управления, приводное средство, которое приводит во вращение вал управления, и механизм понижения скорости для понижения крутящего момента приводного средства и для передачи мощности на пониженной скорости валу управления, причем механизм понижения скорости имеет вал вращения, поддерживаемый с возможностью вращения в корпусе, прикрепленном к корпусу двигателя, и рычаг, который соединяет вал вращения и вал управления, при этом двигатель внутреннего сгорания с переменной степенью сжатия содержит:
первую часть регулирования, расположенную в корпусе двигателя, для механического регулирования вала управления в положение максимального поворота на одной стороне из стороны низкой степени сжатия и стороны высокой степени сжатия; и
вторую часть регулирования, расположенную в корпусе для механического регулирования вала вращения в положение максимального поворота на другой стороне из стороны низкой степени сжатия и стороны высокой степени сжатия.
2. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 1, в котором
первая часть регулирования выполнена с возможностью регулирования вала управления в положение максимального поворота на стороне высокой степени сжатия, а
вторая часть регулирования выполнена с возможностью регулирования вала вращения в положение максимального поворота на стороне низкой степени сжатия.
3. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 1 или 2, дополнительно содержащий:
датчик поворота для определения углового положения одного вала из вала управления и вала вращения; и
средство изучения исходного положения для выполнения операции изучения исходного положения степени сжатия, на основе сигнала обнаружения от датчика вращения, в состоянии, когда другой вал из вала управления и вала вращения был механически отрегулирован посредством либо первой части регулирования, либо второй части регулирования.
4. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 3, в котором
датчик вращения выполнен с возможностью определения углового положения вала вращения, а
средство изучения исходного положения выполнено с возможностью осуществления операции изучения исходного положения степени сжатия, на основе сигнала обнаружения от датчика вращения, в состоянии, когда вал управления был механически отрегулирован посредством первой части регулирования.
5. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 1 или 2, в котором
вал вращения устанавливается так, что вал вращения позиционируется в заданном угловом диапазоне, содержащем такое угловое положение, что крутящий момент вокруг вала вращения, который передается от вала управления через рычаг к валу вращения, становится минимальным в состоянии, когда вал вращения был механически отрегулирован посредством второй части регулирования.
6. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 1 или 2, в котором
первая часть регулирования имеет поверхность стопора на стороне высокой степени сжатия, в которую упирается часть вала управления, когда вал управления был повернут в положение максимального поворота на стороне высокой степени сжатия;
вторая часть регулирования имеет поверхность стопора на стороне низкой степени сжатия, в которую упирается часть вала вращения, когда вал вращения был повернут в положение максимального поворота на стороне низкой степени сжатия; и
точность поверхности для поверхности стопора на стороне высокой степени сжатия задается более высокой, чем точность поверхности для поверхности стопора на стороне низкой степени сжатия.
7. Двигатель внутреннего сгорания с переменной степенью сжатия по п. 1 или 2, в котором
механизм переменной степени сжатия содержит:
нижнее звено, установленное с возможностью вращения на шатунную шейку коленчатого вала;
верхнее звено, которое соединяет нижнее звено и поршень двигателя внутреннего сгорания; и
звено управления, которое соединяет вал управления и нижнее звено.
| ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ | 2001 |
|
RU2256085C2 |
| Двигатель внутреннего сгорания с переменным ходом поршня | 1988 |
|
SU1686203A1 |
| JP 2013241846 A, 05.12.2013 | |||
| JP 2011169152 A, 01.09.2011 | |||
| WO 2013080673 A1, 06.06.2013. | |||

