Изобретение относится к области навигационных систем и может быть использовано для позиционирования наземных подвижных объектов на основе информации, получаемой от двух и более пространственно разнесенных видеокамер.
За последние годы резко возросла опасность диверсионной и террористической деятельности с использованием скоростных наземных средств передвижения. Для пресечения передвижения представляющих опасность подвижных объектов необходимо вовремя отслеживать во времени навигационные параметры этого объекта, его местоположение и скорость. Задача осложняется тем, что во многих случаях, на пересеченной местности с большим числом препятствий и в городских условиях, где присутствуют и другие подвижные объекты, единственным способом обнаружения опасного объекта являются видеонаблюдения, причем действовать ответственному персоналу приходится в экстремальной ситуации и очень быстро.
Давно известны радиолокационные методы позиционирования подвижных объектов, в которых используются радиотехнические средства и методы. При активной радиолокации по пассивным целям сигналы, излучаемые антенной передающего устройства радиолокационной станции (РЛС), фокусируются и направляются на цель. Приемное устройство той же либо другой РЛС принимает отраженные волны и преобразует их так, что выходное устройство с помощью опорных сигналов извлекает содержащуюся в отраженном сигнале информацию: наличие цели, ее дальность, направление, скорость и др. По времени запаздывания отраженного сигнала относительно излученного определяют наклонную дальность цели, а по его амплитудным и фазовым характеристикам - его направление (пеленг). Повторные измерения позволяют определить скорость цели по приращениям направления и дальности, либо по изменению частоты принимаемых сигналов (доплеровского сдвига). Радиолокационные методы с использованием одной либо нескольких РЛС активно применяют там, где это возможно, но в сложных наземных условиях бывает невозможно идентифицировать подвижную цель среди множества других подвижных объектов, поэтому приходится искать другие методы.
Для позиционирования удаленного объекта могут использоваться дальномерно-угломерные приборы (ДУП), снабженные дальномером (как правило, лазерным) и средствами для измерения вертикальных и горизонтальных углов. Направив луч прибора на позиционируемый объект, можно получить с его помощью сферические координаты объекта по отношению к точке наблюдения, где располагается ДУП: наклонную дальность, магнитный азимут и угол места. Для определения собственных координат (привязки к местности) ДУП оснащают спутниковым навигационным приемником (ГЛОНАСС), либо подключают к приборам, его содержащим. На основе сферических координат и местоположения ДУП находят координаты объекта. ДУП удобен для позиционирования статичных объектов, но попасть лучом на подвижный объект, да еще в экстремальной ситуации, практически невозможно.
Наиболее близким к предлагаемому способу (прототипом) является способ позиционирования, основанный на определении углов на объект с двух позиций (Дардари Д. Методы спутникового и наземного позиционирования. Перспективы развития технологий обработки сигналов. М.: Техносфера, 2012, с. 128, 129). Для однократного позиционирования каждый из 2-х операторов с известных позиций в реальном времени фиксирует с помощью угломерных приборов направление от точки наблюдения на объект. Для определения скоростных характеристик подвижного объекта необходимы повторные измерения.
Если в локальной системе координат совместить начало координат с одной из точек наблюдения, а ось X направить в сторону другой точки наблюдения, то позиция объекта определится в ходе решения треугольника, у которого найдено основание (расстояние между позициями наблюдения) и два прилежащих к нему угла на объект. Если в полученном треугольнике со сторонами a, b, c и соответствующими противолежащими углами α, β, ν известна сторона с и прилежащие углы α и β (β - угол при начале координат), то сначала, используя теорему синусов, определяют неизвестную сторону a, а затем и координаты объекта (х,y):
a=c×sinα/sin(α+β)
x=a⋅cosβ
y=a⋅sinβ
В качестве угломерных инструментов могут использоваться те же ДУП, так как фиксация направления значительно проще и не предполагает использования лазерных лучей и попадания их на объект. Однако, учитывая, что для обнаружения объекта используются видеокамеры, более естественно и удобно фиксировать угловые параметры с помощью поворотных видеокамер, на момент прохождения изображения объекта через визирную линию.
Недостатком данного способа позиционирования является то, что в реальном времени, особенно в экстремальной ситуации, очень трудно «засечь» без ошибок быстро передвигающийся объект, к тому же практически невозможно добиться синхронной засечки углов обоими операторами, что неизбежно приводит к ошибкам позиционирования подвижного объекта.
Целью изобретения является повышение точности позиционирования подвижного объекта, а так же облегчение процедуры ввода оператором информации за счет фиксации изображения и использования при вводе данных манипулятора «мышь», а так же применения интерполяции, сводящей к минимуму ошибку рассогласования во времени вводимой операторами информации.
Для достижения цели предложен способ позиционирования подвижного объекта, основанный на многократном периодическом определении углов на объект с двух позиций, заключающийся в том, что для определения углов используются видеоизображения от двух разнесенных видеокамер, местоположение и направление оптических осей которых известно, при этом каждый из операторов, ответственных за свою точку наблюдения, заметив на экране своего ПЭВМ опасный объект, начинает периодическую процедуру фиксации (остановки) изображения выделенной клавишей (например, клавишей «пробел») и засечки объекта на изображении (определения его дисплейных координат) с помощью манипулятора «мышь». Расчет местоположения и параметров вектора скорости производят на основе трех последних замеров от одной из точек наблюдения и одного замера от другой точки, при этом применяют интерполирование трассы объекта при предположении постоянства вектора скорости на интервале 3-х замеров.
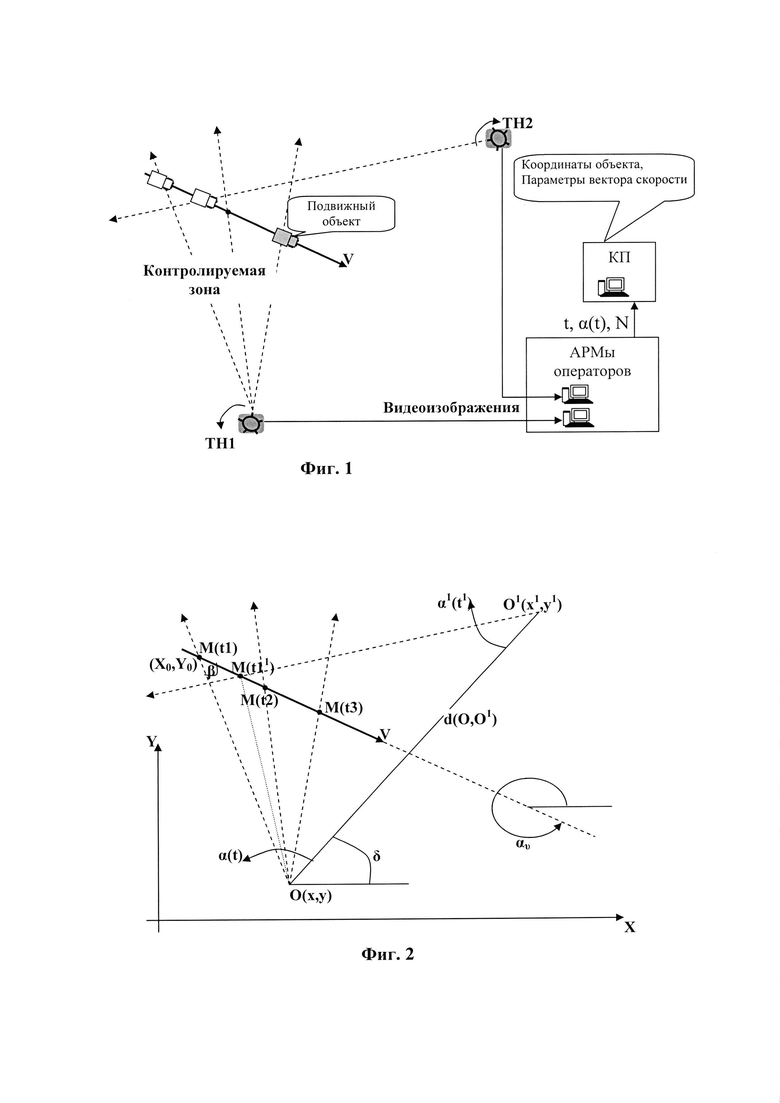
Схема получения исходной информации представлена на фиг. 1:
1. Каждая из 2-х точек наблюдения (ТН) оснащена поворотными платформами с видеокамерами, которые транслируют изображения на операторский пункт. Скорости вращения видеокамер, а так же их количество выбирают, исходя из величины и особенностей контролируемой зоны, характеристик видеокамер и потенциально опасных объектов.
2. Каждый из операторов, ответственных за свою точку наблюдения, наблюдает обстановку на экранах ПЭВМ своего АРМ.
3. Заметив на экране потенциально опасный объект, оператор повторяет процедуру ввода параметров - нажатием выделенной клавиши фиксирует изображение и с помощью манипулятора «мышь» отмечает (засекает) объект, автоматически возвращая при этом экран в режим реального просмотра.
4. По отклонению от визирной линии видеокамеры зафиксированных дисплейных координат объекта и по направлению оптической оси самой видеокамеры автоматически определяют на момент засечки направление (азимут) от задействованной точки наблюдения на объект. Информацию о времени засечки, направлении и номере точки наблюдения (t, α(t), N) передают на командный пункт (КП).
5. На основе 3-х последних замеров от одной из ТН и замера от 2-ой ТН вычисляют координаты и параметры вектора скорости подвижного объекта, изображение объекта выводят на электронную карту КП.
Расчет навигационных параметров (фиг. 2) производят на горизонтальной плоскости в выбранной декартовой системе координат «восток-север». В момент t1 в точке M(t1) происходит 1-я засечка объекта. В расчетах предполагают постоянство вектора скорости на интервале 3-х последовательных засечек.
Исходными параметрами служат координаты 2-х ТН: O(х,у), О1(х1,y1), а так же времена засечек и азимуты от 1-й ТН: t1, t2, t3, α(t1), α(t2), α(t3) и 2-й ТН: t11, α1(t11).
Выходными параметрами являются координаты объекта (M(t1)) на момент t1 (X0, Y0), модуль и направление вектора скорости (υ, αν).
Расчет навигационных параметров производят следующим образом.
1. Используя координаты ТН, находят базу - расстояние между точками наблюдения: d(O,O1) и угол наклона базы - δ:
2. Используя теорему синусов для треугольников с вершинами O, M(t1), M(t2) и O, M(t1), M(t3) и учитывая линейную зависимость между временем и пройденным расстоянием, после преобразований находят угол β:

где 
3. Затем используя теорему синусов для треугольников с вершинами O, M(t1), M(t2) и O, M(t1), M(t11) и проведя преобразования, находят угол α(t11):

где 
4. Зная d(O,O1), α(t11), α1(t11) из треугольника с вершинами O, M(t11), O1 находят d(O, M(t11)):

5. Зная d(O, M(t11)), углы β, α(t1), α(t11) из треугольника с вершинами O, M(t1), M(t11) находят d(O, M(t1)) и d(M(t1), M(t11)):


6. Находят искомые параметры: координаты объекта в точке (M(t1)) на момент t1 (X0, Y0), модуль и направление вектора скорости (υ, αυ):




7. Экстраполированные координаты объекта X(t), Y(t) на текущий момент времени (t) до получения следующей засечки определяют по формулам:


Достигаемым техническим результатом предлагаемого способа позиционирования является повышение точности позиционирования подвижного объекта, а так же облегчение процедуры ввода операторами информации за счет фиксации изображения и использования при вводе данных манипулятора «мышь», а так же применения интерполяции, сводящей к минимуму ошибку рассогласования во времени вводимой операторами информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционирования подвижного объекта на основе видеоизображений | 2018 |
|
RU2696009C1 |
| Способ определения собственных координат по трем визирным светоизлучающим маркерам | 2024 |
|
RU2838123C1 |
| СИСТЕМА И СПОСОБ ВИДЕОМОНИТОРИНГА ЛЕСА | 2011 |
|
RU2458407C1 |
| Способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов | 2015 |
|
RU2608176C1 |
| ГЕОИНФОРМАЦИОННАЯ СИСТЕМА В ФОРМАТЕ 4D | 2017 |
|
RU2667793C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА) | 2011 |
|
RU2466355C1 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА, ИСПОЛЬЗУЕМОГО В СИСТЕМЕ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2013 |
|
RU2527132C1 |
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2014 |
|
RU2562142C1 |
| СПОСОБ И СИСТЕМА ОТОБРАЖЕНИЯ ДАННЫХ С ВИДЕОКАМЕРЫ | 2018 |
|
RU2679200C1 |
Изобретение относится к области навигационных систем и может быть использовано для позиционирования наземных подвижных объектов. Достигаемый технический результат – повышение точности позиционирования подвижного объекта, а также облегчение процедуры ввода операторами информации за счет фиксации изображения и использования при вводе данных манипулятора «мышь», а так же применения интерполяции, сводящей к минимуму ошибку рассогласования во времени вводимой операторами информации. Указанный результат достигается за счет того, что способ позиционирования подвижного объекта осуществляют на основе информации от двух и более разнесенных видеокамер, местоположение и расположение оптических осей которых известно, используют для пресечения диверсионной и террористической деятельности с применением скоростных наземных средств передвижения, при этом операторы при появлении потенциально опасного объекта периодически фиксируют видеоизображение и отмечают объект с помощью манипулятора «мышь», а расчет местоположения и параметров вектора скорости объекта производится на основе трех последних замеров от одной из точек наблюдения и одного замера от другой точки, с использованием интерполяции трассы объекта. 2 ил.
Способ позиционирования подвижного объекта, основанный на многократном определении углов на объект с двух позиций, заключающийся в том, что для определения углов используются видеоизображения от двух разнесенных видеокамер, местоположение и направление оптических осей которых известно, отличающийся тем, что каждый из операторов, ответственных за свою точку наблюдения на соответствующей позиции, определив на экране персональной электронной вычислительной машины (ПЭВМ) своего автоматизированного рабочего места (АРМ) потенциально опасный объект, осуществляет периодическую фиксацию видеоизображения путем его остановки выделенной клавишей, засечку объекта на видеоизображении с помощью манипулятора «мышь» и определение его дисплейных координат, автоматически возвращая экран в режим реального просмотра, затем по отклонению от визирной линии видеокамеры зафиксированных дисплейных координат объекта и по направлению оптической оси самой видеокамеры определяют на момент засечки направление от задействованной точки наблюдения на объект, информацию о времени засечки, направлении и номере точки наблюдения передают на командный пункт, определение местоположения и параметров вектора скорости производят на основе трех последних замеров от одной из точек наблюдения и одного замера от другой точки, при этом осуществляют интерполирование трассы объекта при предположении постоянства вектора скорости на интервале трех замеров.
| ДАРДАРИ Д | |||
| Методы спутникового и наземного позиционирования | |||
| Перспективы развития технологий обработки сигналов | |||
| Москва, Техносфера, 2012, с.128,129 | |||
| СИСТЕМА И СПОСОБ АВТОМАТИЗИРОВАННОГО ВИДЕОНАБЛЮДЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ И СИТУАЦИЙ | 2003 |
|
RU2268497C2 |
| СПОСОБ ПОЛУЧЕНИЯ ШИРОКОПОЛОСНОГО УСИЛЕНИЯ БЕЗ ЧАСТОТНЫХ И ФАЗНЫХ ИСКАЖЕНИЙ | 1933 |
|
SU38699A1 |
| Импульсный регулятор | 1947 |
|
SU83676A1 |
| WO 2006017402 A3, 28.12.2006 | |||
| ЭПОКСИДНОЕ СВЯЗУЮЩЕЕ ДЛЯ АРМИРОВАННЫХ ПЛАСТИКОВ | 2006 |
|
RU2323236C1 |
| US 5880815 A, 09.03.1999 | |||
| EP 776130 A2, 28.05.1997. | |||

