Группа изобретений относится к области военной техники, в частности к способам повышения подвижности военной автомобильной техники.
Под подвижностью понимают способность образца передвигаться своим ходом (маршем) с установленным вооружением и военной техникой (ВВТ), военно-техническими грузами, перевозимым личным составом (ЛС) (Факторы, влияющие на подвижность военной автомобильной техники / Б.Н. Сидоров, В.В. Нечаев // Сборник статей V Международной научно-практической конференции «Материально-техническое обеспечение силовых структур государства». – Пермь: ФГКВОУ ВО «Пермский военный институт войск национальной гвардии Российской Федерации», 2018. – 334-339 с. Открытое издание). При этом основными показателями подвижности являются максимальная и средняя скорости движения, а характеристикой выступает расход топлива (или запас хода по топливу).
В свою очередь, под военной автомобильной техникой (ВАТ) понимают такую автомобильную технику, созданную по тактико-техническим заданиям Министерства обороны Российской Федерации (МО РФ), используемую для монтажа, буксировки ВВТ, а также для перевозки личного состава, и воинских грузов. Также в состав ВАТ входят и гусеничные машины (ГМ) различного транспортно-тягового класса, такие как: МТ-ЛБ (и ее модификации), ГМ (и ее модификации) и др. Одними из основных типов ВАТ являются автомобили многоцелевого назначения (АМН) и автомобильные базовые шасси (АБШ). При этом АМН представляют собой полноприводные автомобили высокой проходимости, предназначенные для перевозки личного состава и воинских грузов, буксировки прицепных систем, а также монтажа ВВТ. В свою очередь АБШ представлены автомобильными шасси, используемыми для монтажа и транспортирования ВВТ, и обеспечивающими их подвижность, и боевое применение. Стоит также отметить, что в последние годы в состав ВАТ входит автомобильная техника, предназначенная для гражданского сектора (неполноприводная), например, такая как магистральные тягачи, предназначенные для перевозки тяжелых крупногабаритных грузов (Устройство военной автомобильной техники / Е.А. Шекунов,
Н.Д. Максименко, И.В. Иванюк, А.П. Дудь. – М.: МГТУ им. Н.Э. Баумана, 2017. – 40 с. Открытое издание).
Несмотря на конструктивные различия вышеперечисленной ВАТ, а именно колесной (как полноприводной так и не полноприводной), представляющей различные транспортно-тяговые классы, колесные формулы и схемы трансмиссий, их объединяющим фактором будет являться применение в трансмиссии дифференциальных механизмов (ДМ), а именно различных по схемам и принципу действия межосевых и межколесных дифференциалов (МОД и МКД соответственно).
В связи с чем группа изобретений предназначена для базовых колесных шасси (БКШ), применяемых МО РФ, которые объединяют выше приведенные транспортно-тяговые классы и способ повышения подвижности, указанных шасси.
Известен способ повышения подвижности автомобилей и БКШ в частности. Способ заключается в том, что для повышения подвижности используют жесткую принудительную блокировку ДМ (как МОД так и МКД). При этом в случае МОД крутящий момент от двигателя принудительно и пропорционально схеме шасси распределяется между передним и задним ведущими мостами, либо между передним мостом (передней тележкой) и задней тележкой. В случае с МКД подводимый к главной передаче по узлам и агрегатам трансмиссии крутящий момент симметрично распределяется между колесами левого и правого бортов (Дифференциалы автомобилей и тягачей / А.Х. Лефаров. – М.: Машиностроение, 1972. – 147 с. Открытое издание).
Известный способ повышения подвижности БКШ позволяет обеспечить передвижение в различных дорожных условиях. Однако указанный способ имеет существенный недостаток, который заключается в том, что безударную жесткую (принудительную) блокировку ДМ можно осуществить только при полной остановке транспортного средства и заблаговременно до преодоления труднопроходимого участка пути. В противном случае (на ходу) это повлечет за собой срез зубьев шестерен ДМ, его заклинивание и как следствие выход из строя трансмиссии (неработоспособность машины). В условиях бездорожья, а также на грунтах с низкой опорной способностью это повлечет за собой потерю максимальной и средней скоростей движения, проседания автомобиля в мягкий грунт, и как следствие потерю мощности на преодоление избыточного сопротивления движению включая увеличение расхода топлива. Стоит также отметить, что в условиях боевых действий данная ситуация (остановка) неминуемо приведет к безвозвратной потере единицы автомобильной техники и перевозимого ею имущества, и самое главное экипажа (ЛС) при огневом воздействии противника.
Наиболее близким техническим решением к предлагаемому способу является способ управления пробуксовкой ведущих колес транспортного средства, путем блокирования межколесного дифференциала при определении разности скоростей ведущих колес транспортного средства и удержания дифференциала в заблокированном состоянии при превышении разностью крутящих моментов на ведущих колесах определенной пороговой величины (Конструирование и расчет колесных машин высокой проходимости. Общие вопросы конструирования / Н.Ф. Бочаров, Л.Ф. Жеглов. – М.: Машиностроение, 1992. – 288 с. Открытое издание).
Недостатком данного способа является его недостаточная эффективность вследствие блокирования дифференциала по превышению определенной пороговой величины, одинаковой для всех типов опорной поверхности.
Известно устройство для блокирования дифференциала, содержащее зубчатую муфту, установленную на шлицах одной полуоси, которая при блокировании посредством пневмопривода входит в зацепление с зубчатым венцом, нарезанным на корпусе дифференциала. Управление устройством осуществляется водителем вручную (Автомобиль: Анализ конструкций, элементы расчета / В.В. Осепчугов, А.К. Фрумкин. – M: Машиностроение, 1989. – 153 с. Открытое издание).
Недостатком данного устройства является низкая эффективность его работы, вследствие того, что оно обеспечивает высокие показатели проходимости только при условии своевременного включения и выключения механизма блокировки, что определяется правильностью и своевременностью действий водителя.
Наиболее близким техническим решением к предлагаемому устройству является устройство управления блокировкой межколесного дифференциала транспортного средства, содержащее муфту блокировки, установленную на полуоси и связанную со штоком пневматического цилиндра, блок управления, связанный посредством электрических цепей с датчиками частот вращения ведущих колес и угла поворота рулевого колеса и модулятором давления, соединенный посредством пневмопроводов с пневмоцилиндром и тормозными камерами тормозной системы транспортного средства (патент РФ № 96 407 от 27.07.2010). Данное устройство позволяет автоматически блокировать дифференциал при буксовании одного из ведущих колес.
Недостатками данного технического решения является: недостаточная эффективность работы, вследствие неуправляемых блокирующих свойств, что приводит к блокированию дифференциала во всех случаях возникновения разных угловых скоростей ведущих колес (например, в режиме движения (трогание, разгон, подъем, спуск, маневрирование), при преодолении сложных дорожных условий (спуски, косогоры, бугры и т.д.) различных деформируемых грунтовых оснований (пахота, луговина, песок и т.д.), ухудшению управляемости автомобиля на скользкой дороге и ограниченной совместимости с антиблокировочной системой (АБС).
Техническая задача предлагаемой группы изобретений заключается в повышении подвижности БКШ распределением мощности в трансмиссии, во всех условиях движения, на всех типах опорных поверхностей, а также в условиях бездорожья.
Техническим результатом предложенной группы изобретений является повышение подвижности БКШ во всех условиях движения, сохранение максимальной и средней скоростей движения, снижение расхода топлива и вероятности поражения автомобиля и экипажа (ЛС) огневым воздействием противника за счет применения устройства для распределения мощности в трансмиссии БКШ.
Технический результат достигается за счет того, что способ повышения подвижности базовых колесных шасси за счет распределения мощности в трансмиссии, включающий блокировку дифференциального механизма при помощи блока управления в зависимости от разности скоростей ведущих колес транспортного средства, согласно группы изобретений, включает применение устройства повышения подвижности базовых колесных шасси, с помощью которого управляют блокировкой межосевого и всех межколесных дифференциалов в заданном режиме движения, причем управление осуществляют с помощью пакета управляющих программ от момента начала рассогласования величины скорости вращения ведущих колес.
Технический результат достигается также за счет того, что устройство повышения подвижности базовых колесных шасси включает блок управления, датчики скоростей вращения ведущих колес и угла поворота рулевого колеса с модулятором давления, согласно группы изобретений, блок управления, состоит из трехосевого акселерометра, датчика крена и командоконтроллера с пакетом управляющих программ; на всех ведущих колесах установлены датчики антиблокировочной системы, электрически соединенные между собой и с блоком управления; датчики скоростей вращения расположены на всех приводных валах и ведущих колесах, они электрически соединены между собой и с блоком управления; на передних колесах установлены датчики угла поворота колес, которые электрически соединены с блоком управления; на всех ведущих колесах установлены модуляторы давления тормозов антиблокировочной системы, они выполнены из пневматических агрегатов, каждый из которых соединен индивидуальной электрической цепью с блоком управления; на межколесных и межосевом дифференциалах установлены пневмоприводы блокировок, электрически связанные с блоком управления.
Устройство повышения подвижности базовых колесных шасси представляет собой блок управления с 3-х осевым акселерометром, датчиком крена, снабженный пакетом управляющих программ, соединенный электрическими цепями с датчиками скоростей вращения, расположенными на всех приводных валах и ведущих колесах БКШ, датчиками угла поворота колес, установленными на передних управляемых колесах, датчиками АБС, расположенными на всех ведущих колесах, модуляторами тормозов системы АБС, приводами блокировок МОД и МКД. Устройство позволяет при движении БКШ в сложных дорожных условиях, а также при трогании, разгоне, подъеме, спуске, маневрировании, движении по неоднородным покрытиям (в различных режимах движения), оптимально распределять мощность, подводимую от двигателя через агрегаты трансмиссии при помощи управления безударной и жесткой блокировкой ДМ (МОД и МКД), при этом, не снижая скоростного режима.
Способ повышения подвижности БКШ основан на том, что в режиме движения (трогание, разгон, подъем, спуск, маневрирование), при преодолении сложных дорожных условий (спуски, косогоры, бугры и т.д.) различных деформируемых грунтовых оснований (пахота, луговина, песок и т.д.), колеса левого и правого бортов одного моста (нескольких или всех) начинают вращаться асинхронно, что в свою очередь приводит к буксованию и как следствие, к увеличению разности скоростей вращения ведущих колёс. При этом датчики скоростей вращения, расположенные на всех приводных валах и ведущих колесах БКШ передают в блок управления данные о различии в частотах вращения колёс. В таком случае устройство, при помощи блока управления и заложенного в него алгоритма действий для конкретного режима движения, анализирует полученную информацию о частотах вращения колес, положение в пространстве (акселерометр, крен), и если полученные значения превышают допустимые пределы, то блок управления передаёт, при помощи электрических цепей (основанных на CAN шине), управляющий сигнал на модуляторы тормозов ведущих колес и привода блокировок МОД, и МКД, тем самым кратковременно подтормаживая забегающее колесо или полуосевую шестерню в МОД (МКД), позволяя выровнять угловую скорость со скоростью отстающего элемента и произвести безударную жесткую блокировку (или разблокирование), в результате чего подводимая мощность оптимально перераспределяется, исходя из конкретного режима и условий движения (ниже приведены примеры осуществления способа в общих режимах и условиях движения), обеспечивая тем самым сохранение максимальной и средней скоростей движения, снижение расхода топлива и вероятности поражения БКШ и экипажа (ЛС) огневым воздействием противника.
Способ повышения подвижности БКШ, заключается в оптимальном распределении мощности, в трансмиссии БКШ, при помощи управления безударной и жесткой блокировки МОД, и МКД, согласно изобретения, используют распределение мощности при помощи устройства повышения подвижности базовых колесных шасси, которое обеспечивает ее оптимальное распределение через сочетание жесткой и безударной блокировки МОД, и МКД во время движения, сохраняет максимальную и среднюю скорости движения, снижает расход топлива и вероятность поражения автомобиля и экипажа (ЛС) огневым воздействием противника.
Устройство повышения подвижности (распределения мощности), снабжено блоком управления с 3-х осевым акселерометром и датчиком крена, соединенным электрическими цепями с датчиками скоростей вращения, расположенными на всех приводных валах и ведущих колесах БКШ, датчиками угла поворота колес, установленными на передних управляемых колесах, датчиками АБС расположенными на всех ведущих колесах, модуляторами тормозов системы АБС, приводами блокировок МОД и МКД.
Для достижения технического результата устройство повышения подвижности базовых колесных машин, содержит блок управления, датчики скоростей вращения ведущих колес и угла поворота рулевого колеса с модулятором давления, при этом блок управления, состоит из трехосевого акселерометра, датчика крена и командоконтроллера с пакетом управляющих программ; на всех ведущих колесах установлены датчики антиблокировочной системы, электрически соединенные между собой и с блоком управления; датчики скоростей вращения расположены на всех приводных валах и ведущих колесах, они электрически соединены между собой и с блоком управления; на передних колесах установлены датчики угла поворота колес, которые электрически соединены с блоком управления; на всех ведущих колесах установлены модуляторы давления тормозов антиблокировочной системы, они выполнены из пневматических агрегатов, каждый из которых соединен индивидуальной электрической цепью с блоком управления; на межколесных и межосевом дифференциалах установлены пневмоприводы блокировок, электрически связанные с блоком управления.
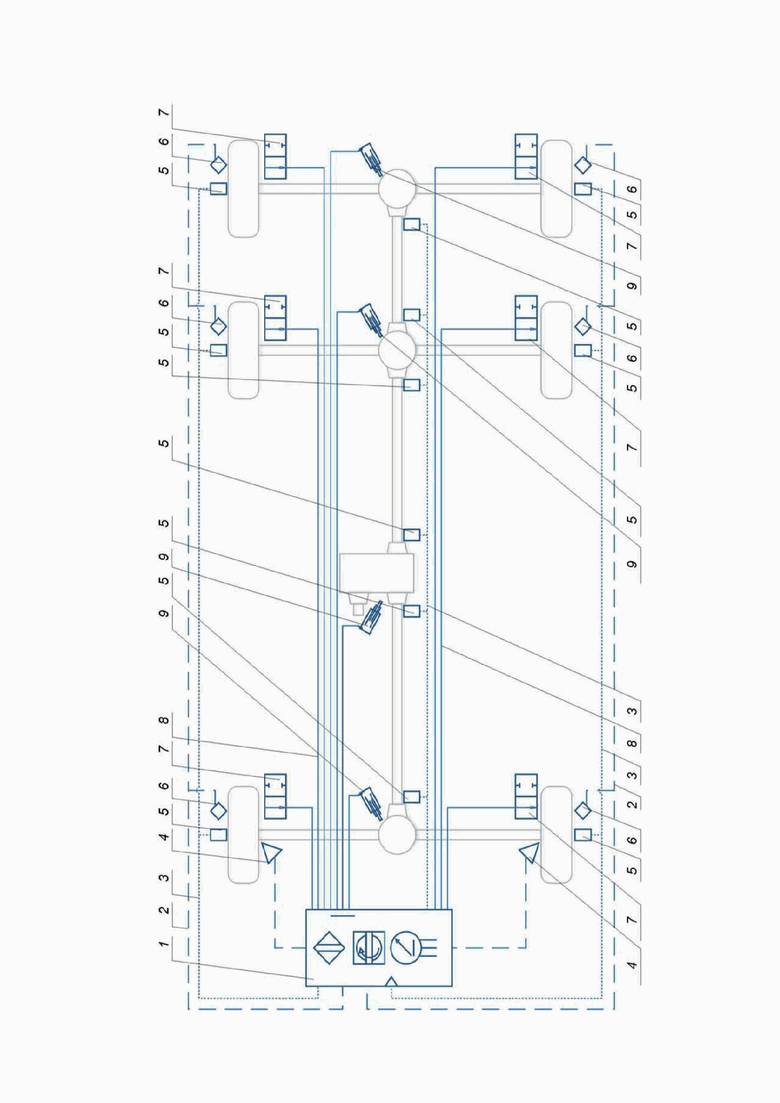
Группа изобретений поясняется фиг., где изображена схема устройства повышения подвижности БКШ, на которой позициями обозначены: 1 – блок управления с 3-осевым акселерометром и датчиком крена; 2 – электрическая цепь (основанная на CAN шине) объединяющая датчики антиблокировочной системы 6 расположенные на всех ведущих колесах; 3 – электрическая цепь (основанная на CAN шине) объединяющая датчики скоростей вращения 5, расположенные на всех приводных валах и ведущих колесах; 4 – датчики угла поворота колес, установленные на передних управляемых колесах; 5 – датчики скоростей вращения, расположенные на всех приводных валах и ведущих колесах; 6 – датчики антиблокировочной системы расположенные на всех ведущих колесах; 7 – модуляторы тормозов антиблокировочной системы; 8 – электрические цепи (индивидуального) управления пневматическими агрегатами (модуляторами тормозов антиблокировочной системы 7 и приводами блокировок межосевого дифференциала и межколесных дифференциалов 9); 9 – привода блокировок межосевого дифференциала и межколесных дифференциалов.
Устройство (фиг.) включает электронный блок управления 1, состоящий из командоконтроллера с пакетом управляющих программ, 3-х осевого акселерометра и датчика крена; расположенные на всех ведущих колесах датчики 6 антиблокировочной системы (АБС), соединенные между собой и с блоком управления 1 электрической цепью 2, основанной на CAN шине; расположенные на всех приводных валах и ведущих колесах датчики скоростей вращения 5, электрически соединенные между собой и с блоком управления 1 электрической цепью 3 (основана на CAN шине); установленные на передних управляемых колесах датчики угла поворота колес 4, электрически соединенные с блоком управления 1; модуляторы тормозов 7 антиблокировочной системы, расположенные на всех ведущих колесах, выполненные из пневматических агрегатов, каждый из которых соединен индивидуальной электрической цепью 8 с блоком управления 1; на межколесных и межосевом дифференциалах установлены пневмоприводы блокировок 9 электрически связанные с блоком управления.
Устройство распределения мощности в трансмиссии БКШ работает, в соответствии с заданным режимом, следующим образом.
Режим «Трогание» – перед началом движения устройство, при помощи пневмоприводов 9, блокирует МОД и все МКД, что помогает пропорционально (в равной доле) распределить мощность, подводимую от двигателя на все ведущие колеса, при этом блок управления 1 при помощи управляющей программы сопоставляет данные (значения физических величин), получаемые от датчиков 3-х осевого акселерометра (градусы отклонения от нормали) и крена (градус отклонения от горизонта) с данными, получаемыми от датчиков угла поворота (градус отклонения от нормали) управляемых колес 4 и датчиков скоростей вращения, расположенных на всех приводных валах и ведущих колесах 5. В случае, если регистрируемые параметры находятся в допустимом соотношении с эталонными, заложенными в управляющей программе блока управления 1 БКШ набирает скорость равную 10 км/ч, после чего активируется режим работы «Разгон».
Режим «Разгон» – при наборе скорости свыше 10 км/ч блок управления 1, получая данные от датчиков угла поворота управляемых колес 4, датчиков скоростей вращения 5 и датчиков АБС 6, расположенных на управляемых колесах, о начале криволинейного движения, формирует и передает управляющий сигнал через электрические цепи (индивидуального) управления 8 модуляторам тормозов АБС 7, которые подают воздух на тормозные механизмы управляемых колес, подтормаживая их выравнивают угловые скорости вращения колес и приводом блокировки 9 МКД управляемых колес разблокирует его (происходит разблокирование МКД управляемых колес переднего моста). Далее при устойчивом наборе скорости и её достижении свыше 20 км/ч блок управления 1, получая данные от датчиков скоростей вращения о частотах вращения, расположенных на приводных валах 5 среднего и заднего мостов БКШ и ведущих колес среднего и заднего мостов через электрические цепи (индивидуального) управления 8 модуляторами тормозов АБС 7 во взаимодействии с датчиками АБС 6 среднего и заднего мостов подтормаживая, выравнивает угловые скорости вращения колес среднего и заднего мостов и приводами блокировки 9 МКД колес среднего и заднего мостов разблокирует их (разблокирование МКД колес среднего и заднего мостов). Далее при достижении скорости 30 км/ч блок управления 1 получает данные через электрические цепи 2 (основанные на CAN шине), объединяющие датчики АБС 6, расположенные на всех ведущих колесах и через электрические цепи 3 (основанные на CAN шине), объединяющих датчики скоростей вращения 5, расположенных на всех приводных валах и ведущих колесах; после этого с целью исключения эффекта негативной циркуляции мощности в узлах и агрегатах трансмиссии при помощи привода блокировки 9 МОД в раздаточной коробке блок управления 1 отключает МОД (разблокирование МОД в раздаточной коробке). После чего продолжается набор скорости, до средней технической, рекомендованной заводом изготовителем, и далее автомобиль движется с постоянной скоростью.
Режим «Подъём» – при движении БКШ с углом возвышения и при понижении скорости, блок управления 1 сопоставляет эталонные данные от 3-х осевого акселерометра с данными, получаемыми через электрические цепи 3 от датчиков скоростей вращения 5, расположенных на всех приводных валах и ведущих колесах, и через электрическую цепь (индивидуального) управления 8 приводом блокировки 9 МОД, превентивно включает его для максимальной реализации крутящего момента двигателя (происходит превентивное блокирование МОД в раздаточной коробке). После чего автомобиль продолжает движение на установившемся скоростном режиме.
Режим «Спуск» – при движении БКШ с углом понижения и при увеличении скорости, блок управления 1 сопоставляет эталонные данные от 3-х осевого акселерометра с данными, получаемыми через электрические цепи 3 от датчиков скоростей вращения 5, расположенных на всех приводных валах и ведущих колесах, и через электрическую цепь (индивидуального) управления 8 приводом блокировки 9 МОД, отключает его для наилучшей работы системы АБС (происходит разблокирование МОД в раздаточной коробке). После чего автомобиль продолжает движение на установившемся скоростном режиме.
Режим «Движение по неоднородным покрытиям» – при движении с установившимся скоростным режимом, в диапазоне до 45 км/ч и пробуксовке колес одной стороны относительно другой, вне зависимости от расположения моста (передний, средний, задний) блок управления 1 сопоставляет эталонные данные от 3-х осевого акселерометра и датчика крена с данными, получаемыми через электрические цепи 3 от датчиков скоростей вращения 5, расположенных на всех приводных валах и ведущих колесах, электрические цепи 2 объединяющие датчики АБС 6, расположенные на всех ведущих колесах, через электрические цепи 8 (индивидуального) управления пневматическими агрегатами (модуляторами тормозов АБС 7 и приводами блокировок МОД и МКД 9) позволяет автоматически блокировать МОД и МКД в различных комбинациях для обеспечения устойчивого движения БКШ и снижения потерь скорости, при необходимости переходя в режим «Маневрирование».
Режим «Маневрирование» – в случае увеличения скорости движения, в диапазоне свыше 50 км/ч и выше, и положения БКШ относительно опорной поверхности в горизонтальной плоскости, блок управления 1 сопоставляет данные от 3-х осевого акселерометра и датчика крена с данными, получаемыми через электрические цепи 3 от датчиков скоростей вращения 5, расположенных на всех приводных валах и ведущих колесах, электрических цепей 2, объединяющих датчики АБС 6, расположенных на всех ведущих колесах, электрических цепей 8 (индивидуального) управления пневматическими агрегатами (модуляторами тормозов АБС 7 и приводами блокировок МОД и МКД 9) позволяет определить маневр БКШ и в зависимости от скорости отключает блокировки МОД и МКД для улучшения управляемости.
Предлагаемый способ позволяет повысить подвижность БКШ на различных деформируемых грунтовых основаниях, не оказав отрицательного воздействия на показатели проходимости, на твердых дорожных покрытиях обеспечить сохранение максимальной и средней скоростей движения, снизить расход топлива и вероятность поражения автомобиля и экипажа огневым воздействием противника, оптимально распределить мощность, в трансмиссии БКШ, за счет того, что во время движения датчики скоростей вращения, расположенные на всех приводных валах и ведущих колесах, передают в блок управления данные, и в случае различия этих частот, блок управления, по заложенной в него управляющей программе, для конкретного режима движения, анализирует полученные данные о частотах вращения колес, положении в пространстве (акселерометр, крен), и если полученные значения превышают допустимые эталонные пределы, то передаёт, через электрические цепи, управляющий сигнал на модуляторы тормозов ведущих колес и привода блокировок МОД, и МКД, тем самым кратковременно подтормаживая забегающее колесо или полуосевую шестерню в МОД (МКД) позволяя выровнять угловую скорость со скоростью отстающего элемента и произвести безударную жесткую блокировку (или разблокирование), в результате чего подводимая мощность оптимально перераспределяется, исходя из конкретного режима и условий движения.
Таким образом, предлагаемая группа изобретений реализует поставленную техническую задачу.
Изобретение относится к военной технике. Устройство распределения мощности в трансмиссии включает блок управления, датчики скоростей вращения ведущих колес и угла поворота рулевого колеса с модулятором давления. Блок управления состоит из трехосевого акселерометра, датчика крена и командоконтроллера. На всех ведущих колесах установлены датчики антиблокировочной системы, электрически соединенные между собой и с блоком управления. Датчики скоростей вращения расположены на всех приводных валах и ведущих колесах и электрически соединены между собой и с блоком управления. На передних колесах установлены датчики угла поворота колес, электрически соединенные с блоком управления. На всех ведущих колесах установлены модуляторы давления тормозов антиблокировочной системы, выполненные из пневматических агрегатов, каждый из которых соединен индивидуальной электрической цепью с блоком управления. На межколесных и межосевом дифференциалах установлены пневмоприводы блокировок, электрически связанные с блоком управления. Повышается подвижность шасси. 1 ил.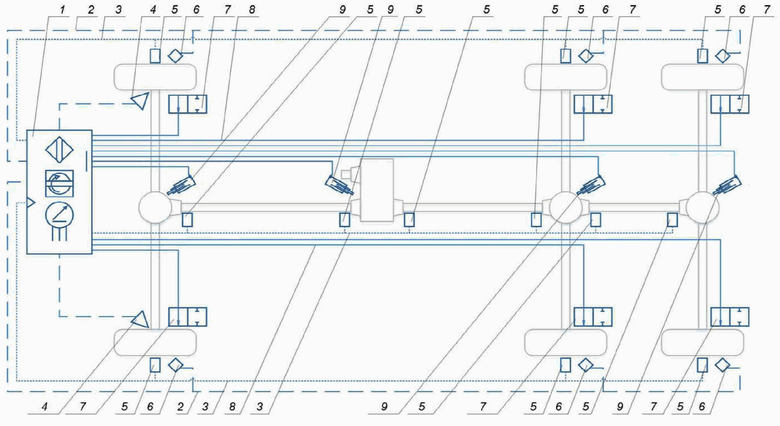
Устройство распределения мощности в трансмиссии, включающее блок управления, датчики скоростей вращения ведущих колес и угла поворота рулевого колеса с модулятором давления, отличающееся тем, что блок управления состоит из трехосевого акселерометра, датчика крена и командоконтроллера с пакетом управляющих программ; на всех ведущих колесах установлены датчики антиблокировочной системы, электрически соединенные между собой и с блоком управления; датчики скоростей вращения расположены на всех приводных валах и ведущих колесах, они электрически соединены между собой и с блоком управления; на передних колесах установлены датчики угла поворота колес, которые электрически соединены с блоком управления; на всех ведущих колесах установлены модуляторы давления тормозов антиблокировочной системы, они выполнены из пневматических агрегатов, каждый из которых соединен индивидуальной электрической цепью с блоком управления; на межколесных и межосевом дифференциалах установлены пневмоприводы блокировок, электрически связанные с блоком управления.
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Способ получения препарата "Фенатин" (фосфата-Р-фенил-изопропиламиданикотиновой кислоты) | 1951 |
|
SU96407A1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |

