Изобретение относится к сферическому колесу, предназначенному для обеспечения движения транспортного средства и к транспортному средству, в котором применяют такое колесо.
Классически четырехколесные транспортные средства оснащены управляемыми колесами, позволяющими им менять направление. Колеса соединены с транспортным средством при помощи поворотных связей, и в случае управляемых колес добавляется дополнительная степень свободы во вращении. Если управляемые колеса являются ведущими, карданные шарниры позволяют приводить в действие колеса, одновременно обеспечивая изменение ориентации оси поворотной связи. Конфигурация этого типа не позволяет получать радиусы небольшого поворота. Иначе говоря, невозможно повернуть транспортное средство на месте без скорости.
Кроме того, были предприняты попытки реализовать транспортное средство, содержащее сферические колеса, каждое из которых может поворачиваться вокруг собственной оси. Пример такого выполнения описан в патентной заявке, опубликованной под номером JP 2007-210576. В этом документе описано колесо, содержащее две полусферы. Колесо приводится во вращение горизонтальным приводным валом, который приводит во вращение опору, на которой установлены обе полусферы. Последние установлены, каждая, на опоре при помощи поворотной связи. Обе поворотные связи находятся на одной линии. Их общая ось перпендикулярна к оси вращения приводного вала. Транспортное средство, такое как робот, может быть оснащено четырьмя колесами, как описано в документе JP 2007-210576. Притом оси приводных валов четырех колес расположены перпендикулярно друг к другу. Таким образом, колеса расположены в линию попарно. Приведение во вращение двух колес первой пары обеспечивает движение транспортного средства в направлении, перпендикулярном к общей оси этой пары колес. Что касается второй пары колес, полусферы свободно вращаются вокруг своей поворотной связи. Движение робота в перпендикулярном направлении получают, приводя во вращение колеса второй пары. Разумеется, можно применять комбинированные движения. Это позволяет транспортному средству перемещаться в любом направлении и даже поворачиваться вокруг своей оси.
Приводной вал колеса заходит в колесо через экваториальную плоскость колеса, находящуюся между двумя полусферами. Экваториальную плоскость определяют по аналогии с земным шаром. Эта плоскость разделяет две полусферы, которые можно уподобить северному и южному земным полушариям. Приводной вал должен обладать определенной жесткостью, что определяет его минимальный диаметр. Таким образом, обе полусферы отстоят друг от друга по меньшей мере на величину этого диаметра. На практике к диаметру вала следует добавить функциональный зазор, чтобы полусферы не терлись о приводной вал. Таким образом, получают две полусферы, каждая из которых ограничена плоскостью. Плоскости двух полусфер параллельны между собой и расположены на расстоянии, которое нельзя уменьшить без снижения жесткости приводного вала.
Когда экваториальная плоскость колеса находится в вертикальном положении относительно земли, которая считается горизонтальной, появляется разрыв опоры колеса на землю. В частности, если колесо является ведущим, экваториальная плоскость колеса входит в контакт с землей при каждом обороте и приводит к переходу опоры на землю от одной полусферы к другой и, следовательно, от одной плоскости полусферы к другой. Во время прохождения через этот разрыв может произойти потеря сцепления с землей, при этом на какой-то момент теряется сферичность колеса, и на высокой скорости при каждом прохождении возникает шум.
Во французской патентной заявке FR 12-53981, поданной на имя заявителя 30 апреля 2012 года, было предложено другое сферическое колесо, похожее на колесо, описанное в документе JP 2007-210576. Это другое сферическое колесо позволяет уменьшить разрыв на уровне прохождения через экваториальную плоскость колеса за счет выполнения секущими плоскостей, ограничивающих две полусферы. На практике название «полусфера» больше не может быть использовано, и его заменяют термином «сегмент» для определения двух частей колеса, поверхности каждой из которых следуют сферической поверхности колеса. Каждый из сегментов шарнирно установлен при помощи поворотной связи относительно приводного вала колеса. Оба сегмента, ограничены, каждый, плоскостью, и обе плоскости являются секущими. Иначе говоря, оси двух поворотных связей больше не находятся на одной линии.
Эти два варианта выполнения имеют сингулярность, когда ось одной из поворотных связей перпендикулярна к земле. В этой конфигурации, если транспортное средство с таким колесом имеет вектор скорости, не перпендикулярный к приводной оси рассматриваемого колеса, оно проскальзывает на уровне своей точки соприкосновения с землей. Чтобы избежать этого проскальзывания, каждый сегмент (или полусфера) содержит ролик, расположенный в продолжении поворотной связи рассматриваемого сегмента и обеспечивающий качение на уровне сферической поверхности. Ролики имеют степень свободы вращения вокруг оси, перпендикулярной к приводной оси колеса. Этого движения вращения достаточно, чтобы избежать проскальзывания колеса в конфигурации сингулярности. Каждый ролик имеет линию качения, которая следует сферической поверхности колеса.
Как в документе JP 2007-210576, так и во французской патентной заявке FR 12-53981 ролики выполнены как можно меньшими, чтобы сохранить максимально большие поверхности сегментов для колеса. Действительно, колесо может быть ведущим, только если оно входит в контакт с землей по поверхности своих сегментов. Поэтому следует уменьшить до минимума размеры роликов, в частности, чтобы максимально уменьшить круглое отверстие, выполненное в каждом из сегментов для прохождения соответствующих роликов.
Лабораторные испытания, проведенные заявителем, показали, что во время прохождения через сингулярность скорость вращения рассматриваемого сегмента значительно менялась, что является недостатком с учетом инерции сегмента. В частности, при постоянной линейной скорости транспортного средства скорость вращения сегмента, входящего в контакт с землей, может меняться от минимального значения, когда вращение сегмента происходит на уровне ограничивающей его плоскости, до максимального значения, когда вращение сегмента происходит на уровне края отверстия, выполненного для прохождения ролика. При упомянутой постоянной линейной скорости транспортного средства можно получить последовательность, связывающую различные точки контакта с землей:
- контакт с землей по плоскости, ограничивающей сегмент,
- прохождение через край отверстия,
- качение на ролике,
- снова прохождение через край отверстия,
- и, наконец, возврат к плоскости, ограничивающей сегмент.
Во время первого прохождения через край отверстия вращение сегмента вокруг его поворотной связи происходит в одном направлении, которое должно поменяться на обратное в момент второго прохождения через край отверстия, чтобы избежать любого трения сегмента с землей. Инерция сегмента может помешать этой смене направления вращения. Эта помеха может быть тем больше, чем меньше размеры отверстия, учитывая высокие скорости вращения, достигаемые сегментом. Эта помеха еще больше усиливается при повышении линейной скорости транспортного средства. Действительно, это повышение линейной скорости приводит к повышению скорости вращения сегмента и к сокращению времени, необходимому для смены вектора скорости вращения на обратный вблизи сингулярности. Эти резкие изменения скорости требуют как для сегмента, так и для ролика участия большой кинетической энергии и могут привести к рискам трения между колесом и землей.
Задачей изобретения является снижение скорости вращения сегмента вблизи сингулярности. В связи с этим объектом изобретения является сферическое колесо с радиусом R, предназначенное для обеспечения движения транспортного средства, при этом колесо приводится в движение валом, выполненным с возможностью вращения вокруг оси, при этом колесо содержит два сегмента, поверхность которых следует сферической поверхности колеса и каждый из которых ограничен плоскостью, при этом сегменты шарнирно установлены, каждый, при помощи поворотной связи относительно вала вокруг оси, перпендикулярной к плоскости рассматриваемого сегмента, при этом колесо дополнительно содержит два ролика, каждый из которых расположен в отверстии каждого из сегментов, при этом отверстие является круглым и центровано вокруг оси соответствующей поворотной связи, при этом каждый ролик расположен в продолжении поворотной связи рассматриваемого сегмента, при этом каждый ролик может свободно вращаться вокруг оси, перпендикулярной к оси вала, при этом каждый ролик обеспечивает качение на уровне сферической поверхности, отличающееся тем, что отверстие каждого сегмента имеет радиус S вокруг оси его поворотной связи, и тем, что радиусы S отверстия каждого сегмента и r соответствующего ролика рассчитаны таким образом, чтобы по существу уравновешивать усилия, необходимые для приведения во вращение сегмента и соответствующего ролика, когда колесо переходит от опоры на землю на сегменте по краю отверстия к опоре на землю на соответствующем ролике.
Линия качения роликов занимает угловой сектор, центрованный по центру сферического колеса. Предпочтительно этот угловой сектор превышает 35°.
Объектом изобретения является также транспортное средство, содержащее по меньшей мере три колеса в соответствии с изобретением. Оси валов по меньшей мере двух колес не находятся на одной линии.
Заявитель провел другие лабораторные испытания, которые показали, что во время прохождения через сингулярность небольшой диаметр ролика приводит к увеличению его угловой скорости при одной и той же линейной скорости транспортного средства. Поскольку ролик не механизирован и вращается свободно вокруг своей оси вращения, то именно движение транспортного средства приводит ролик во вращение. Во время прохождения через сингулярность ролик должен переходить от нулевой скорости к высокой скорости. Учитывая инерцию ролика, между роликом и землей могут появится трения. Кроме того, быстрое изменение скорости вращения ролика тоже требует в данном случае подачи кинетической энергии за очень короткое время в момент, когда контакт колеса с землей переходит от сегмента на ролик. Эта подача энергии может создавать перебои в движении транспортного средства.
Поскольку кинетическая энергия является функцией квадрата скорости вращения ролика, предпочтительно задачей изобретения является сокращение этой подачи энергии за счет увеличения диаметра ролика, что приводит к уменьшению кинетической энергии, необходимой для вращения ролика. Разумеется, изобретение позволяет сократить риски трения, которые могли бы появляться во время приведения во вращение ролика. Изобретение представляет особый интерес при высоких скоростях транспортного средства.
Действительно, наибольший радиус r каждого из роликов вокруг его соответствующей оси превышает четверть радиуса R сферического колеса. Этот признак, относящийся к радиусу r роликов, представляет интерес, даже если определенный выше угловой сектор, занимаемый роликами, меньше 35°.
Изобретение и его другие преимущества будут более очевидны из нижеследующего описания варианта его осуществления, представленного в качестве примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 и 2 изображает первый вариант сферического колеса в соответствии с изобретением.
Фиг. 3 - второй вариант сферического колеса в соответствии с изобретением.
Фиг. 4 - вид в частичном разрезе колеса, показанного на фиг.1 и 2.
Фиг. 5 - другой внешний вид колеса, показанного на фиг. 1 и 2.
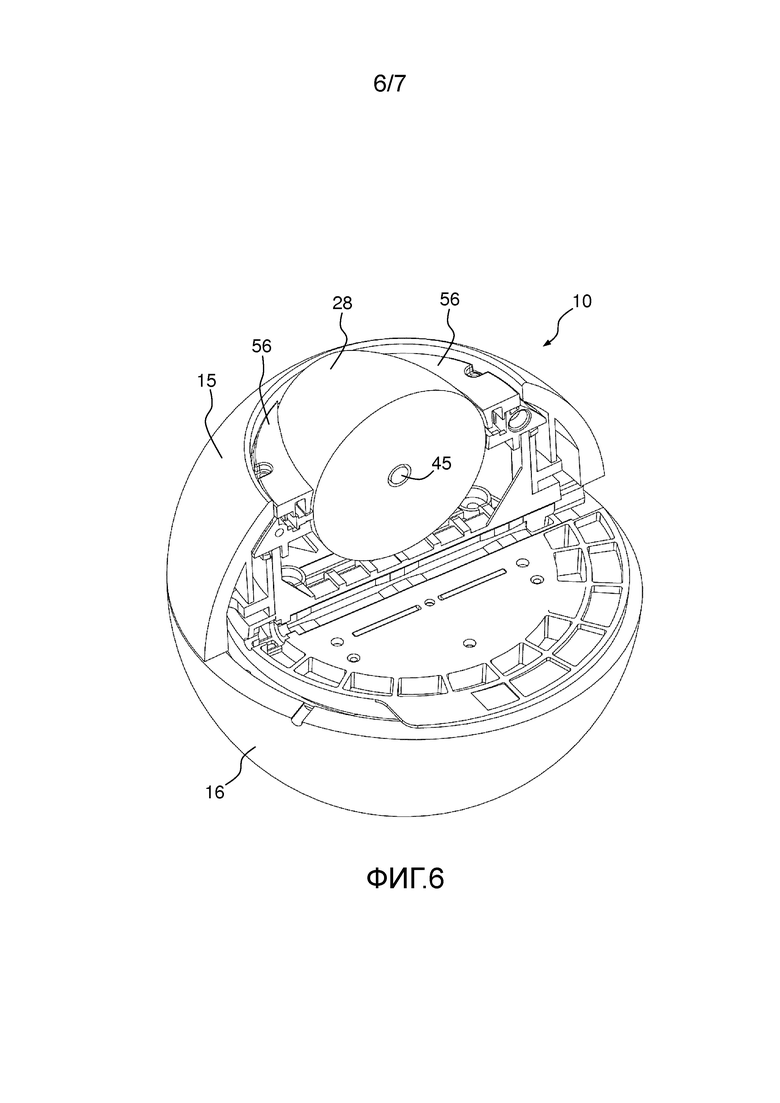
Фиг. 6 - вид в изоиетрии и в частичном разрезе колеса, показанного на фиг.1 и 2.
Фиг. 7 - пример транспортного средства, оснащенного колесами, показанными на фиг.1 и 2.
Для большей ясности на разных фигурах одни и те же элементы имеют одинаковые обозначения.
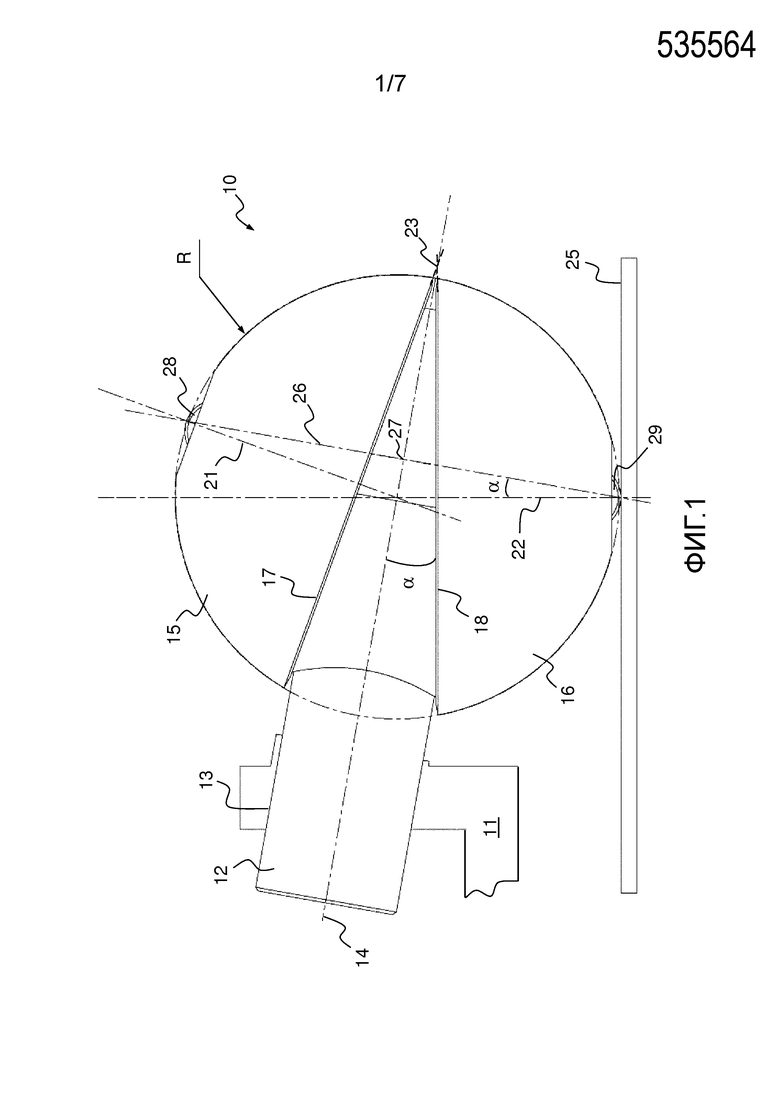
На фиг. 1 и 2 показано сферическое колесо 10 с радиусом R, предназначенное для обеспечения движения транспортного средства 11. На фиг. 1 колесо показано сбоку, а на фиг. 2 - в перспективе. Колесо 10 приводится во вращение валом 12. Транспортное средство 11 показано в виде своего кузова, и вал 12 связан с кузовом через поворотную связь 13. Ось вращения вала 12 обозначена позицией 14.
Колесо 10 содержит два сегмента 15 и 16, наружная поверхность которых следует сферической поверхности колеса 10. Сегмент 15 ограничен плоскостью 17, а сегмент 16 ограничен плоскостью 18. Сегменты 15 и 16 шарнирно установлены, каждый, при помощи поворотной связи, соответственно 19 и 20, относительно вала 12. Ось 21 поворотной связи 19 перпендикулярна к плоскости 17 сегмента 15, а ось 22 поворотной связи 20 перпендикулярна к плоскости 18 сегмента 16. Обе поворотные связи 19 и 20 расположены внутри соответствующего сегмента и будут более подробно описаны ниже.
Можно выполнить сегменты 15 и 16 разными, но предпочтительно они являются идентичными и расположены симметрично относительно вала 12. Иначе говоря, плоскости 17 и 18 являются секущими по прямой, имеющей точку 23 пересечения с осью 14 вала 12. В этой конфигурации оси 21 и 22 обеих поворотных связей 19 и 20 являются секущими и образуют между собой не равный нулю угол.
Колесо 10 предназначено для качения по земле, обозначенной позицией 25 на фиг. 1 и 2. Один из сегментов 15 или 16 входит в контакт с землей 25. Когда вал 12 приводит во вращение колесо 10, оно сохраняет контакт с землей по окружности 26 сферической поверхности колеса 10. При этом движении транспортное средство имеет вектор скорости, перпендикулярный к оси 14 в точке 27 пересечения между осью 14 и плоскостью, содержащей окружность 26. Когда вектор скорости транспортного средства 11, прикладываемый к точке 26, не является перпендикулярным к оси 14, сегмент, входящий в контакт с землей, начинает свободно вращаться вокруг своей поворотной связи.
Иначе говоря, сегменту, входящему в контакт с землей 25, можно сообщать два движения: первое приводящее вращение вокруг оси 14 и второе вращение вокруг оси его поворотной связи. Разумеется, оба вращения можно комбинировать в зависимости от направления вектора скорости транспортного средства в точке 26.
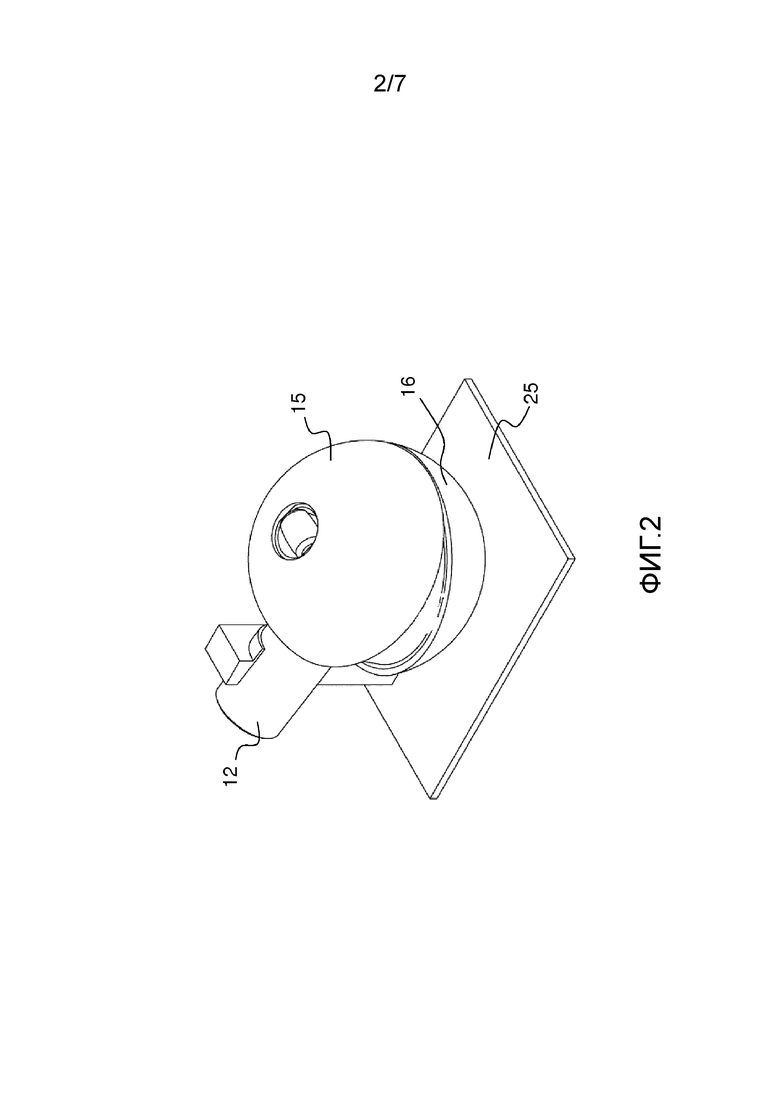
На фиг. 3 представлен вариант сферического колеса 30, приводимого во вращение валом 12, выходящим из транспортного средства 11. Колесо 30 содержит два сегмента 31 и 32, поверхность которых следует сферической поверхности колеса 30. Сегмент 31 ограничен плоскостью 33, и сегмент 32 ограничен плоскостью 34. В отличие от колеса 10 плоскости 33 и 34 параллельны между собой и параллельны оси 14 вала 12. В этом варианте ось 12 параллельна земле 25, если предположить, что земля 25 является плоской.
Во время работы колес 10 и 30 появляется сингулярность, когда сегменты входит в контакт с землей 25, при этом сегмент 16, показанный на фиг. 1, или сегмент 32, показанный на фиг. 3, имеет горизонтальную плоскость соответственно 18 и 34.
В этой конфигурации, если показанное на фиг. 1 транспортное средство имеет вектор, приложенный в точке 27 и не перпендикулярный к оси 14, сегмент 16 не может вращаться вокруг своей поворотной связи 20 и скользит по земле 25. Чтобы избежать этого скольжения, колесо 10 содержит два ролика 28 и 29, при этом с каждым из сегментов связан один ролик. Каждый ролик расположен в продолжении поворотной связи рассматриваемого сегмента и обеспечивает качение на уровне сферической поверхности колеса 10. Более конкретно, сегмент 15 оснащен роликом 28, и сегмент 16 оснащен роликом 29. Ролики могут иметь только одну свободу вращения вокруг оси, перпендикулярной к оси 14. Этого движения вращения достаточно, чтобы избегать скольжения колеса в конфигурации сингулярности. Каждый из роликов имеет линию качения, которая следует сферической поверхности колеса 10.
Это же относится и к колесу 30, которое содержит два ролика 37 и 38, при этом с каждым из сегментов, соответственно 31 и 32, связан один ролик.
Дальнейшее описание представлено для варианта колеса 10, показанного на фиг. 1 и 3. Описанные признаки относятся также к колесу 30.
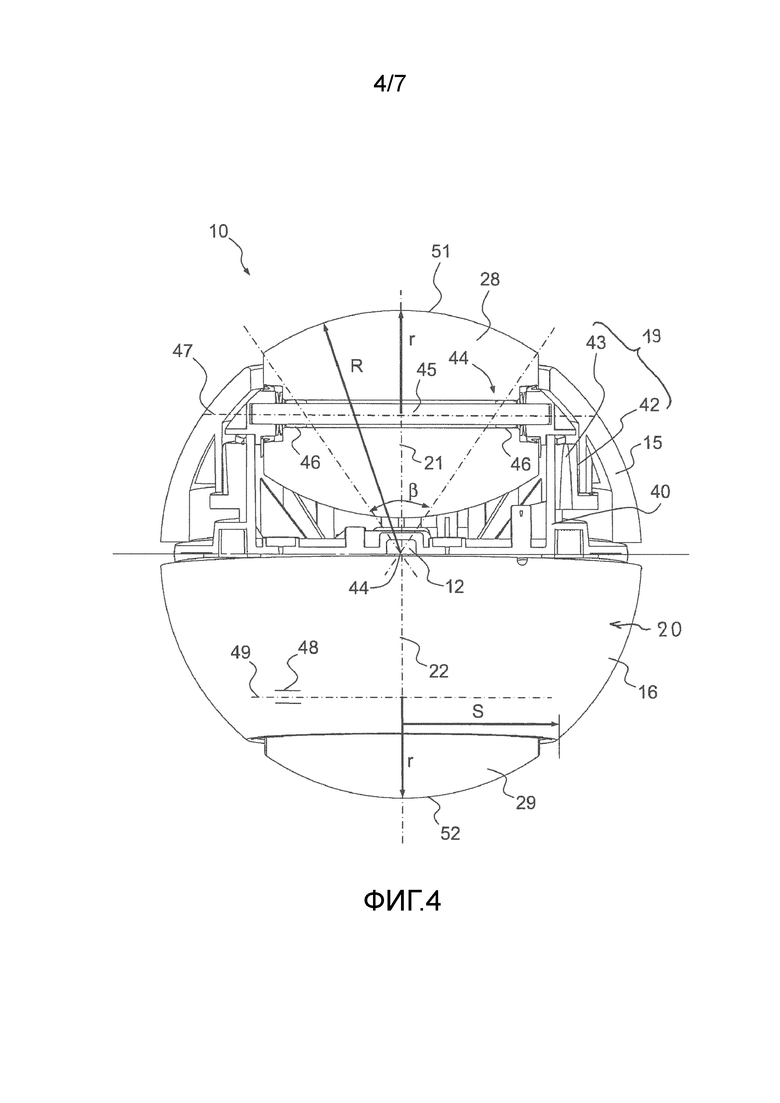
На фиг. 4 представлено колесо 10 в частичном разрезе по плоскости, содержащей оси вращения двух роликов 28 и 29. В разрезе показан только сегмент 15. Колесо 10 содержит опору 40, неподвижно соединенную с валом 12. Опора 40 вращается вокруг оси 14 вместе с валом 12.
Поворотная связь 19 соединяет опору 40 и сегмент 15. Поворотная связь 19 образована опорным подшипником 42. Точно так же, поворотная связь 20, скрытая на фиг. 4, соединяет опору 40 и сегмент 16. Разумеется, можно использовать несколько подшипников на каждый сегмент в зависимости от требуемой жесткости для колеса 10. В этом варианте выполнения опорный подшипник 42 образован распоркой 43, установленной между опорой 40 и сегментом 15. Например, распорка 43 выполнена из материала, обеспечивающего низкий коэффициент трения. Например, можно использовать политетрафторэтилен. Предпочтительно обе поворотные связи 19 и 20 являются идентичными. Возможны также другие варианты выполнения опорных подшипников. Например, можно использовать шарикоподшипники для ограничения момента сопротивления при вращении поворотных связей 19 и 20.
Поворотная связь 44 соединяет ролик 28 и вал 12 через опору 40. Поворотная связь 44 позволяет ролику 28 свободно вращаться вокруг оси 47. Например, поворотная связь 44 выполнена при помощи вала 45, установленного своими двумя концами в опоре 40. Вал 45 проходит через ролик 28. Ролик 28 свободно вращается относительно вала 45. Между валом 45 и роликом 28 могут быть установлены вкладыши. Как и в случае распорки 43, вкладыши могут быть выполнены из материала, имеющего низкий коэффициент трения, например, такого как политетрафторэтилен.
Точно так же, поворотная связь 48, аналогичная поворотной связи 44 и скрытая на фиг. 4, соединяет ролик 29 и вал 12 через опору 40. Эта поворотная связь позволяет ролику 29 свободно вращаться вокруг оси 49.
Ролики 28 и 29 имеют форму бочонков, поэтому их соответствующая линия качения 51 и 52, показанная на фиг. 4, следует сферической форме колеса 10. Линия качения 51 или 52 является кривой, образованной на поверхности ролика 28 или 29 и наиболее удаленной от оси 14. На ролике линия качения перемещается на поверхности ролика в зависимости от его вращения. Линия 51 качения ролика имеет участок окружности, образованный на сферической поверхности колеса 10. Линия качения 51 находится в плоскости, перпендикулярной к плоскости 17, ограничивающей сегмент 15. Точно так же, линия качения 52 находится в плоскости, перпендикулярной к плоскости 18, ограничивающей сегмент 16.
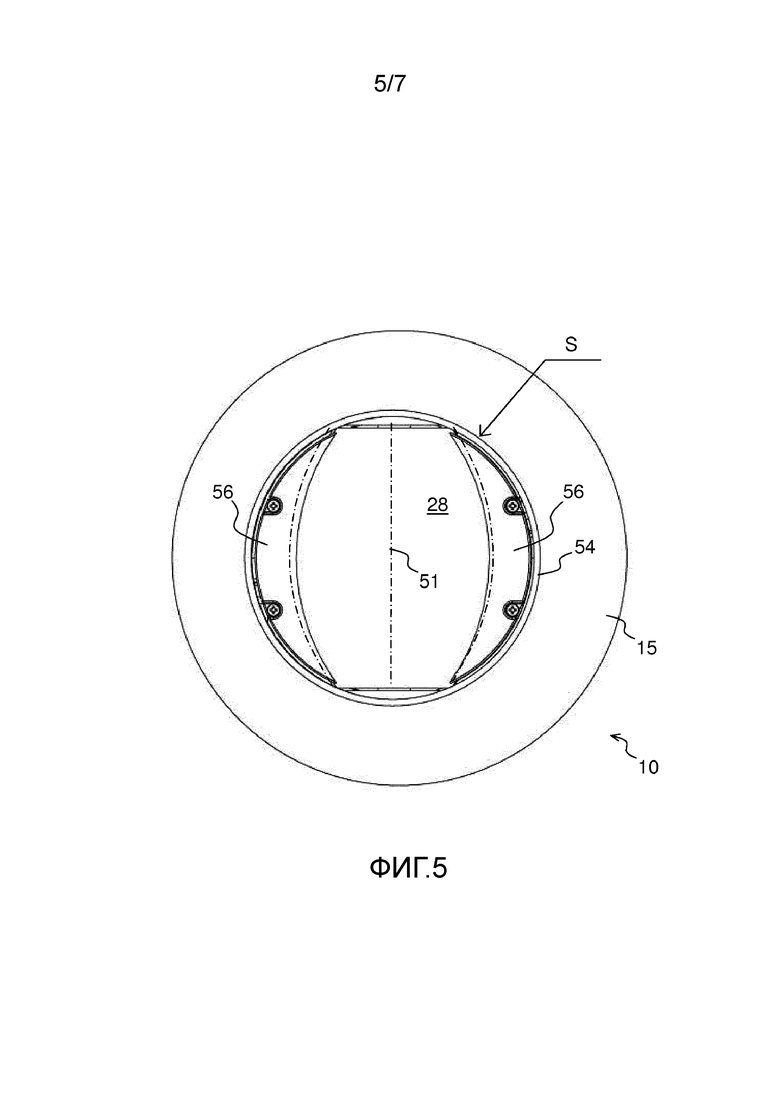
На фиг. 5 показано колесо 10 в виде, центрованном на роликах, например на ролике 28. Ролик 28 виден в круглом отверстии 54, выполненном в сегменте 15 с центром на оси 21. Отверстие каждого сегмента имеет радиус S вокруг оси его соответствующей поворотной связи.
Чтобы избегать резких изменений скорости для сегмента 15, когда опора колеса 10 на землю покидает сегмент 15, переходит на ролик 28 и возвращается, наконец, на ролик 15, увеличивают длину линии качения 51 и, следовательно, диаметр S отверстия 54. Линия качения 51 или 52 каждого из роликов 28 и 29 занимает угловой сектор β, центрованный по центру сферического колеса. Предпочтительно угловой сектор β превышает 35°. Лабораторные испытания показали, что оптимальное значение углового сектора находится в пределах от 45° до 50°. Конструктивно можно выполнить угловой сектор с максимальным значением 130°. Выбранное значение зависит от инерции различных деталей во время движения и от трений между этими различными деталями.
Наибольший радиус каждого из роликов 28 и 29 вокруг их оси, соответственно 47 и 49, обозначен r. Чтобы ограничить скорость вращения роликов 28 и 29, можно увеличить радиус r роликов 28 и 29. Лабораторные испытания показали, что, если радиус r каждого из роликов 28 и 29 превышает четверть радиуса R сферического колеса 10, снижение скорости роликов уже становится существенным.
Можно предусмотреть радиус r, равный половине радиуса R сферического колеса 10, за счет особого расположения вала 12 и опоры 40. При этом один конец вала 12 не будет доходить до центра сферы. В конфигурации, в которой радиус r равен половине радиуса R, оба ролика 28 и 29 соприкасаются. Это позволяет увеличить инерцию ролика, который входит в контакт с землей 25. В частности, когда один из роликов входит в контакт с землей, его вращение приводит к вращению другого ролика. Получаемая инерция по существу увеличивается вдвое по сравнению с инерцией только одного ролика.
Можно также предусмотреть другие промежуточные значения соотношений между радиусами r и R. Если, начиная со значения радиуса r, равного четверти радиуса R, уменьшение скорости вращения ролика уже становится существенным, было установлено, что, если максимальный радиус r каждого из роликов 28 и 29 вокруг их соответствующей оси 47 и 49 превышает треть радиуса R, уменьшение скорости вращения ролика становится еще более существенным.
Разумеется, эту же конструкцию можно использовать для выполнения роликов 27 и 38 сферического колеса 30.
Радиус r роликов и угловой сектор β, занимаемый линией качения роликов, можно оптимизировать независимо друг от друга. Кроме того, радиус S отверстия 54 связан с угловым сектором β, чтобы максимально уменьшить функциональный зазор между роликом и его отверстием. Предпочтительно следует уравновесить усилия, необходимые для приведения во вращение сегмента и соответствующего ролика, когда колесо 10 переходит от опоры на землю сегмента по краю его отверстия к опоре на землю на соответствующем ролике и наоборот. Это позволяет избегать резких изменений усилия между колесом 10 и землей в момент перехода, причем такое изменение усилия сопровождается толчком на валу 12, и следовательно, на транспортном средстве, оснащенном колесом 10.
После выбора материалов производят уравновешивание усилий в основном за счет относительных размеров радиуса S отверстия и радиуса r соответствующего ролика. В частности, радиусы S отверстия каждого сегмента и r соответствующего ролика определяют таким образом, чтобы по существу уравновесить усилия, необходимые для приведения во вращение сегмента и соответствующего ролика, когда колесо переходит от опоры на землю сегмента по краю его отверстия к опоре на землю на соответствующем ролике.
Для каждого сегмента можно определить момент трения Cfc на уровне поворотной связи между рассматриваемым сегментом и валом 12 и, в частности, с опорой 40. Точно так же для каждого ролика можно определить момент трения Cfr на уровне его свободы вращения относительно вала 12.
Предпочтительно получают статическое равновесие усилий трения, связанных с двумя поворотными связями 19 и 44 или 20 и 48. Статическое равновесие получают за счет определения радиусов S отверстия сегмента и r соответствующего ролика таким образом, чтобы по существу добиться следующего равенства:
Cfc/S=Cfr/r
Кроме того, предпочтительно получают динамическое равновесие усилий. Усилия зависят от инерции сегмента и соответствующего ролика. Эти две инерции зависят от материалов и от размеров сегмента и соответствующего ролика. Сегменты и ролики рассчитаны таким образом, чтобы по существу уравновесить кинетическую энергию сегмента и соответствующего ролика, когда колесо переходит от опоры на землю сегментом по краю отверстия к опоре на землю роликом.
В частности, для каждого сегмента определяют момент инерции Ic вокруг оси его поворотной связи между рассматриваемым сегментом и валом. Для каждого ролика определяют момент инерции Ir вокруг оси его свободы вращения относительно приводного вала 12 колеса 10. Размеры и материалы сегментов 15 и 16 и роликов 28 и 29 определяют таким образом, чтобы по существу добиться следующего равенства:
где ωс является скоростью вращения сегмента, когда колесо опирается на землю сегментом по краю отверстия, и ωr является скоростью вращения ролика, когда колесо переходит от опоры на землю сегментом по краю отверстия к опоре на землю роликом.
Предпочтительно колесо содержит две крышки 56, связанные с каждым роликом и закрепленные на валу 12 через опору 40. На фиг.5 и 6 показаны две крышки 56, связанные с роликом 28. Каждая из крышек 56 имеет форму плоского полумесяца, параллельного плоскости 17. Крышки 56 частично перекрывают ролик 28, начиная от отверстия 54. Обе крышки 56 расположены симметрично относительно линии качения 51. Крышки 56 неподвижно соединены с опорой 40. Крышки 56 позволяют ограничить попадание посторонних частиц в колесо 10 через отверстие 54. Тем не менее предусмотрен функциональный зазор между крышками 56 и сегментом 15 для обеспечения вращения сегмента 15 вокруг его поворотной связи 19 без трения с крышками 56.
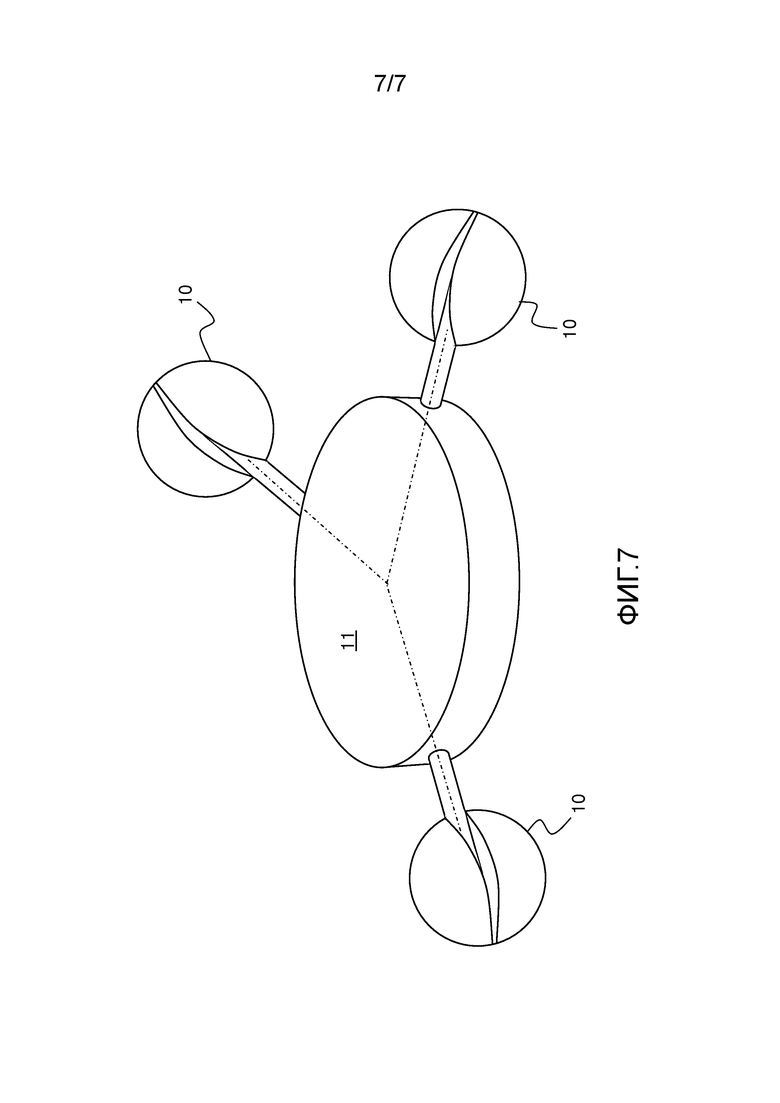
На фиг. 7 показано транспортное средство 11, оснащенное тремя колесами в соответствии с изобретения. Например, это транспортное средство является роботом. Изобретение можно также применять для транспортных средств, содержащих более трех колес. Например, его можно применять для четырехколесного транспортного средства, при этом противоположные колеса находятся в одной вертикальной плоскости относительно горизонтальной земли, образуя таким образом две пары колес. Плоскости, содержащие оси двух пар колес, являются перпендикулярными. Как правило, оси валов по меньшей мере двух колес не расположены в одной плоскости, что позволяет транспортному средству двигаться во всех направлениях, сохраняя свои колеса 10 на земле 25 при помощи соответствующего управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНЫЙ УЗЕЛ ДЛЯ УПРАВЛЯЕМОГО КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО, СОДЕРЖАЩЕЕ ТАКОЙ ОПОРНЫЙ УЗЕЛ | 2019 |
|
RU2800760C2 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2820466C1 |
| БЕЗОПАСНОЕ КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2653913C2 |
| Мотор-колесо транспортного средства | 2023 |
|
RU2813165C1 |
| ШАР-КОЛЕСО КАЛИНКИНА | 2012 |
|
RU2505447C2 |
| Колесо транспортного средства | 1981 |
|
SU992242A1 |
| Транспортное средство | 1987 |
|
SU1468815A1 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2788759C1 |
| Поворотная вилка ведущего колеса транспортного средства | 2024 |
|
RU2819842C1 |
| Колесо | 1976 |
|
SU975458A1 |
Колесо (10) содержит два сегмента (15,16), поверхность которых следует сферической поверхности колеса (10), при этом сегменты (15,16) шарнирно установлены, каждый, при помощи поворотной связи (19,20) относительно вала. Колесо (10) дополнительно содержит два ролика (28,29), каждый из которых расположен в отверстии каждого из сегментов (15,16), при этом отверстие центровано вокруг оси (21,22) соответствующей поворотной связи (19,20), при этом каждый ролик (28,29) расположен в продолжении поворотной связи (19,20) рассматриваемого сегмента (15,16). Каждый ролик (28,29) обеспечивает качение на уровне сферической поверхности. Радиусы S отверстия каждого сегмента (15,16) и r соответствующего ролика (28,29) рассчитаны таким образом, чтобы по существу уравновешивать усилия, необходимые для приведения во вращение сегмента (15,16) и соответствующего ролика (28,29), когда колесо (10) переходит от опоры на землю на сегменте (15,16) по краю отверстия к опоре на землю на соответствующем ролике (28,29). Технический результат – улучшение ходовых характеристик колеса. 2 н. и 10 з.п. ф-лы, 7 ил.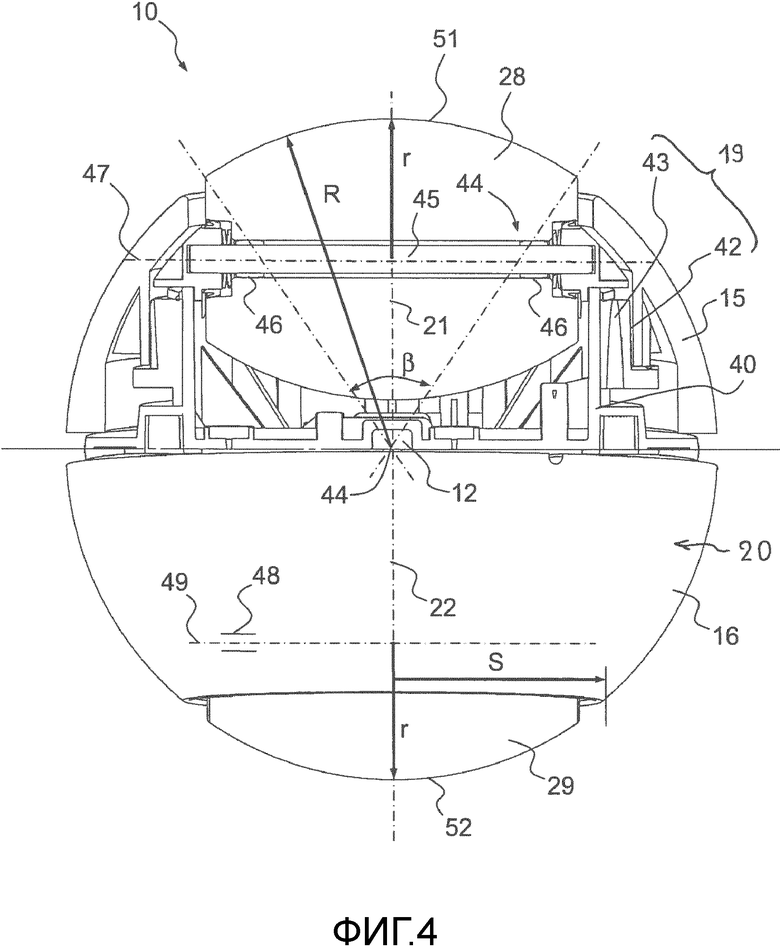
1. Сферическое колесо с радиусом R, предназначенное для обеспечения движения транспортного средства (11), при этом колесо (10,30) приводится в движение валом (12), выполненным с возможностью вращения вокруг оси (14), при этом колесо (10,30) содержит два сегмента (15,16; 31,32), поверхность которых следует сферической поверхности колеса (10,30) и каждый из которых ограничен плоскостью (17,18; 33,34), при этом каждый сегмент (15,16; 31,32) шарнирно установлен при помощи поворотной связи (19,20) относительно вала (12) вокруг оси (21,22), перпендикулярной к плоскости (17,18; 33,34) рассматриваемого сегмента (15,16; 31,32), при этом колесо (10,30) дополнительно содержит два ролика (28,29; 37,38), каждый из которых расположен в отверстии (54) каждого из сегментов (15,16; 31,32), при этом отверстие (54) является круглым и центровано вокруг оси (21,22) соответствующей поворотной связи (19,20), при этом каждый ролик (28,29; 37,38) расположен в продолжении поворотной связи (19,20) рассматриваемого сегмента (15,16; 31,32), при этом каждый ролик (28,29; 37,38) может свободно вращаться вокруг оси (47,49), перпендикулярной к оси (14) вала (12), при этом каждый ролик (28,29; 37,38) обеспечивает качение на уровне сферической поверхности, отличающееся тем, что отверстие (54) каждого сегмента (15,16; 31,32) имеет радиус S вокруг оси (21,22) его поворотной связи (19,20), причем радиусы S отверстия (54) каждого сегмента (15,16; 31,32) и r соответствующего ролика (28,29; 37,38) рассчитаны таким образом, чтобы уравновешивать усилия, необходимые для приведения во вращение сегмента (15,16; 31,32) и соответствующего ролика (28,29; 37,38), когда колесо (10,30) переходит от опоры на землю на сегменте (15,16; 31,32) по краю отверстия (54) к опоре на землю на соответствующем ролике (28,29; 37,38).
2. Колесо по п. 1, отличающееся тем, что линия (51,52) качения роликов (28,29; 37,38) занимает угловой сектор (β), центрованный по центру сферического колеса (10; 30), причем угловой сектор (β) превышает 35°.
3. Колесо по п. 2, отличающееся тем, что угловой сектор (β) меньше 125°.
4. Колесо по одному из пп. 2 или 3, отличающееся тем, что угловой сектор (β) составляет от 45° до 50°.
5. Колесо по одному из пп.1-3, отличающееся тем, что наибольший радиус r каждого из роликов (28,29; 37,38) вокруг его соответствующей оси (47,49) превышает четверть радиуса R сферического колеса (10,30).
6. Колесо по п. 5, отличающееся тем, что наибольший радиус r каждого из роликов (28,29; 37,38) вокруг его соответствующей оси (47,49) превышает треть радиуса R сферического колеса (10,30).
7. Колесо по п. 6, отличающееся тем, что наибольший радиус r каждого из роликов (28,29; 37,38) вокруг его соответствующей оси (47,49) равен половине радиуса R сферического колеса (10,30).
8. Колесо по одному из пп.1-7, отличающееся тем, что для каждого сегмента (15,16; 31,32) определяют момент инерции трения Cfc на уровне поворотной связи (19,20) между рассматриваемым сегментом (15,16; 31,32) и валом (12), причем для каждого ролика (28,29; 37,38) определяют момент трения Cfr на уровне его свободы вращения относительно вала (12), причем радиусы S отверстия (54) сегмента (15,16; 31,32) и r соответствующего ролика (28,29; 37,38) определяют таким образом, чтобы добиться следующего равенства:
Cfc/S=Cfr/r.
9. Колесо по одному из пп.1-3, отличающееся тем, что сегменты (15,16; 31,32) и ролики (28,29; 37,38) рассчитаны таким образом, чтобы уравновесить кинетическую энергию сегмента (15,16; 31,32) и соответствующего ролика (28,29; 37,38), когда колесо (10,30) переходит от опоры на землю сегментом (15,16; 31,32) по краю отверстия к опоре на землю роликом (28,29; 37,38).
10. Колесо по п. 9, отличающееся тем, что для каждого сегмента (15,16; 31,32) определяют момент инерции Ic вокруг оси его поворотной связи между рассматриваемым сегментом (15,16; 31,32) и валом (12), причем для каждого ролика (28,29; 37,38) определяют момент инерции Ir вокруг оси его свободы вращения относительно вала (12), причем размеры и материалы сегментов (15,16; 31,32) и роликов (28,29; 37,38) определяют таким образом, чтобы добиться следующего равенства:
 ,
,
где ωс является скоростью вращения сегмента, когда колесо опирается на землю сегментом (15,16; 31,32) по краю отверстия (54);
ω r является скоростью вращения ролика (28,29; 37,38), когда колесо переходит от опоры на землю сегментом (15,16; 31,32) по краю отверстия (54) к опоре на землю роликом (28,29; 37,38).
11. Колесо по одному из пп.1-10, отличающееся тем, что содержит две крышки (56), связанные с каждым роликом (28,29; 37,38) и закрепленные на валу (12), причем крышки (56) образуют участок сферической поверхности, находящийся в продолжении сферической поверхности сегмента (15,16; 31,32) на уровне отверстия (54), через которое установлен упомянутый ролик (28,29; 37,38), причем крышки (56) частично перекрывают упомянутый ролик (28,29; 37,38), начиная от упомянутого отверстия (54), причем обе крышки (56) расположены симметрично относительно линии качения (51,52) рассматриваемого ролика (28,29; 37,38).
12. Транспортное средство, содержащее по меньшей мере три колеса (10,30) по одному из пп.1-11, причем оси (14) валов (12) по меньшей мере двух колес (10) не расположены в одной плоскости.
| WO 2013164327 A, 07.11.2013 | |||
| NL 7906664 A, 10.03.1981 | |||
| JP 2007210576 A, 23.08.2007. |

