Изобретение относится к транспортному машиностроению, в частности к рулевым управлениям транспортных средств с колесным типом движителя, имеющих передние и задние или все управляемые колеса.
Из уровня техники известна система рулевого управления многоосной колесной машины, включающая гидроусилители передних и задних управляемых колес, клапан управления гидроусилителем передних управляемых колес с золотником, рулевое колесо, связанное через рулевой механизм с рулевой сошкой, воздействующей на золотник клапана управления гидроусилителем передних управляемых колес, и продольную тягу. Система снабжена клапаном управления гидроусилителем задних управляемых колес, выполненным с возможностью обеспечения запаздывания поворота задних управляемых колес относительно передних, за счет увеличения высоты цилиндрических частей золотника и ширины кольцевых проточек в корпусе клапана управления гидроусилителем задних управляемых колес в пропорции, обеспечивающей величину этого запаздывания 5-6°, при этом продольная тяга соединена с золотником гидроусилителя задних управляемых колес (см. RU 2196696, опубликован 20.01.2003).
Также известна система рулевого управления многоосной колесной машины, содержащая рулевое колесо рулевой колонки, связанное через рулевой механизм с рулевой сошкой, воздействующей на золотник клапана управления гидроусилителем передних управляемых колес, систему тяг и рычагов, воздействующих на золотник клапана управления гидроусилителем задних управляемых колес. Система также содержит механизм запаздывания поворота задних управляемых колес, включающий в себя палец со штоком и поршнем, две пружины, корпус со штоком и пальцем, который, воздействуя на золотник клапана управления гидроусилителем задних управляемых колес, обеспечивает запаздывание управляемых колес относительно передних за счет передачи усилия на золотник клапана управления гидроусилителем задних управляемых колес не жестко, а через пружины, установленные в механизме запаздывания, при этом механизм запаздывания установлен между клапаном управления гидроусилителем передних управляемых колес и клапаном управления гидроусилителем задних управляемых колес (см. RU 87988, опубликован 27.10.2009).
Наиболее близким техническим решением к предложенному является рулевое управление транспортного средства с передними и задними управляемыми колесами, содержащее рулевое колесо, кинематически связанное через рулевой механизм с корпусом распределителя передних колес, золотник которого гидравлически связан с насосом и баком гидроусилителя, исполнительным гидроцилиндром передних колес и кинематически связан со штоком гидроцилиндра и рулевым приводом передних колес, с которым кинематически связан корпус распределителя задних колес, золотник которого гидравлически связан с насосом и баком гидроусилителя исполнительным гидроцилиндром задних колес и кинематически связан со штоком гидроцилиндра и рулевым приводом задних колес, при этом оно снабжено мальтийским механизмом, состоящим из двух кривошипов с цевками и креста, установленных на осях, неподвижно связанных с рамой транспортного средства, причем кривошипы соединены с рулевым приводом передних колес, а крест - с рулевыми приводами задних колес (см. RU 2160205, опубликован 10.12.2000).
Недостатком всех перечисленных известных решений является неработоспособность систем при скоростях свыше 75 км/ч, т.к. при увеличении скорости на неровных поверхностях дороги гидравлические устройства, пытаясь вернуть колеса в исходное положение, не справляются, начинается автоколебательный процесс и резко снижается управляемость, а также повышается износ деталей механизмов. Также недостатком наиболее близкого решения является то, что мальтийских механизм не предусматривает наличия непрерывной жесткой связи элементов механизма, а также подвержен высокому износу.
Технической проблемой изобретения является повышение надежности и работоспособности механизма, упрощение его конструкции, улучшение маневренности и управляемости транспортного средства на высоких скоростях.
Техническая проблема изобретения решается тем, что механизм передачи вращательного движения с запаздыванием содержит два вала, первый из которых имеет, по меньше мере, одну щеку, а второй - по меньшей мере, один выступающий сектор, имеющий криволинейные пазы, расположенные симметрично друг другу относительно плоскости, проходящей через ось второго вала, причем каждый паз имеет два участка, первый участок, расположенный ближе ко второму валу, выполнен вогнутым в сторону плоскости симметрии, а сопряженный с ним второй участок выполнен вогнутым в сторону от плоскости симметрии, концы каждого паза расположены ближе к плоскости симметрии, чем его средняя часть, а в каждом пазу размещен ролик, установленный, по меньшей мере, на одной щеке и расположенный в месте изменения знака кривизны паза на границе первого и второго участков при нейтральном положении валов, когда ось первого вала лежит в указанной плоскости симметрии.
Кроме того, ролики могут быть размещены в пазах с возможностью поворота одного вала при повороте другого вала на угол более 2°.
Также техническая проблема решается тем, что механизм рулевого управления колесами заднего моста содержит последовательно связанные между собой тягами рычаги, один из которых связан с механизмом передачи вращательного движения с запаздыванием, который выполнен по любому вышеперечисленному варианту, при этом один из валов соединен с указанным рычагом.
Кроме того, с рычагом может быть соединен первый вал.
Техническим результатом изобретения является обеспечение работоспособности механизма на высоких скоростях, повышение его надежности, упрощение его конструкции при одновременном сохранении высокой маневренности и управляемости транспортного средства за счет использования жестких механических связей, исключения гидравлических связей и выполнения механизма передачи вращательного движения из вышеперечисленных элементов.
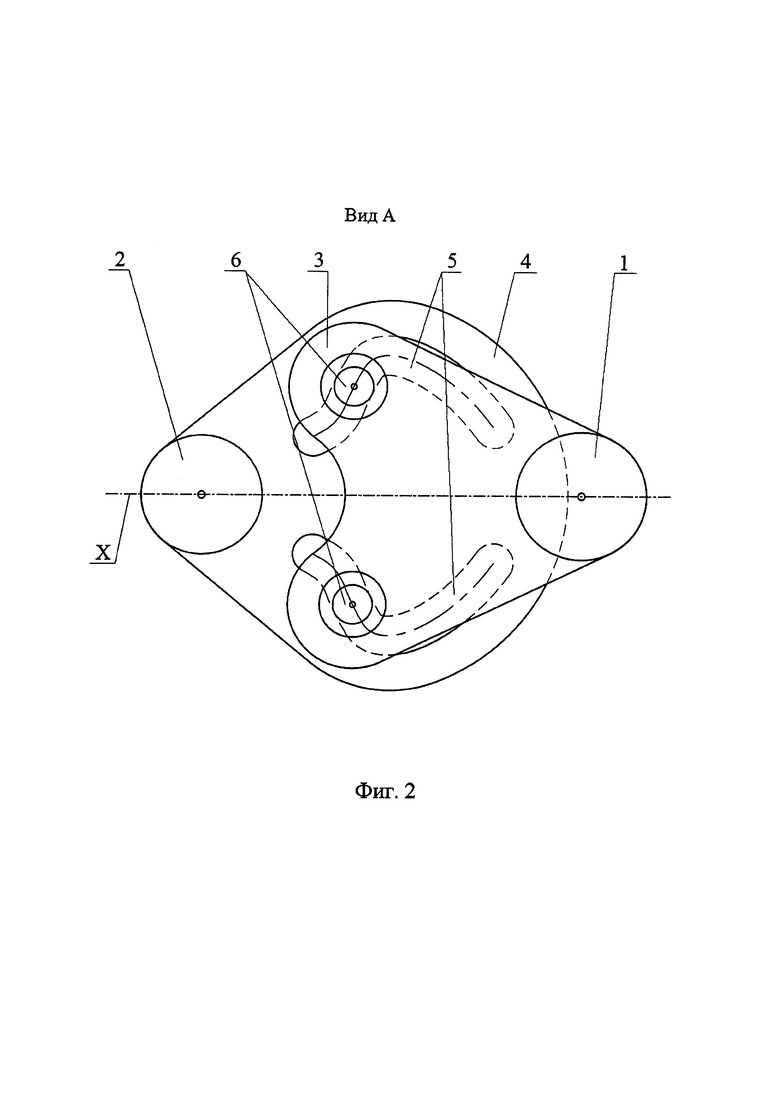
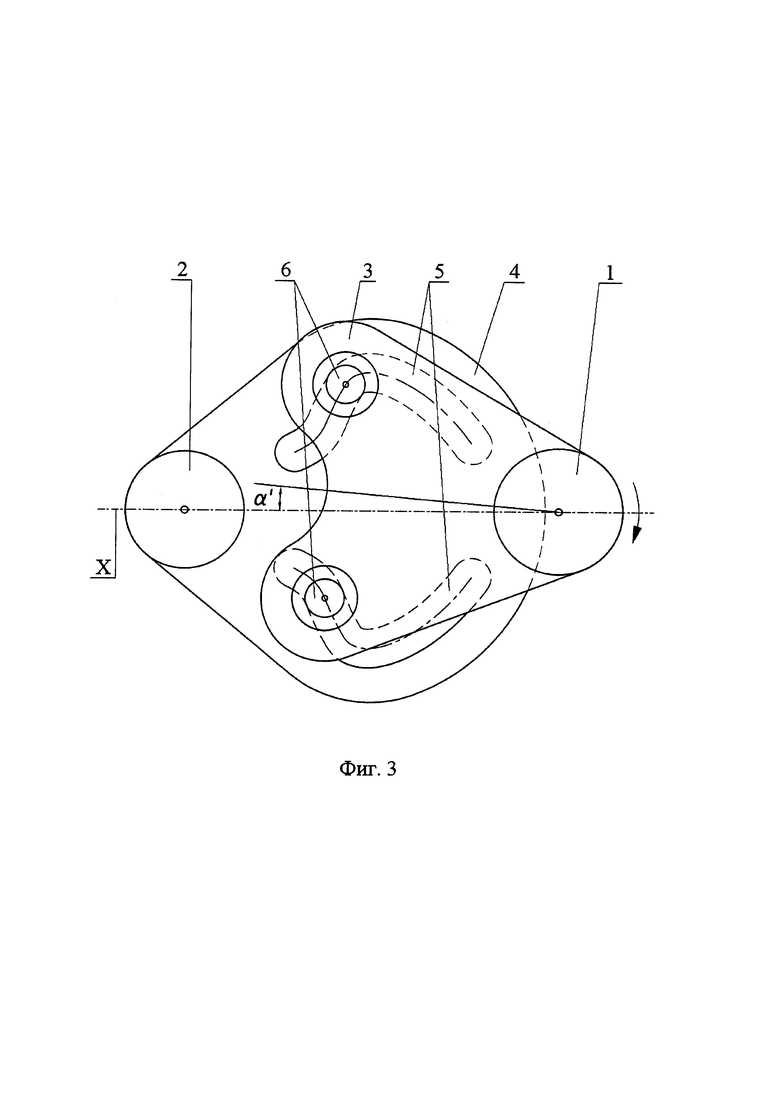
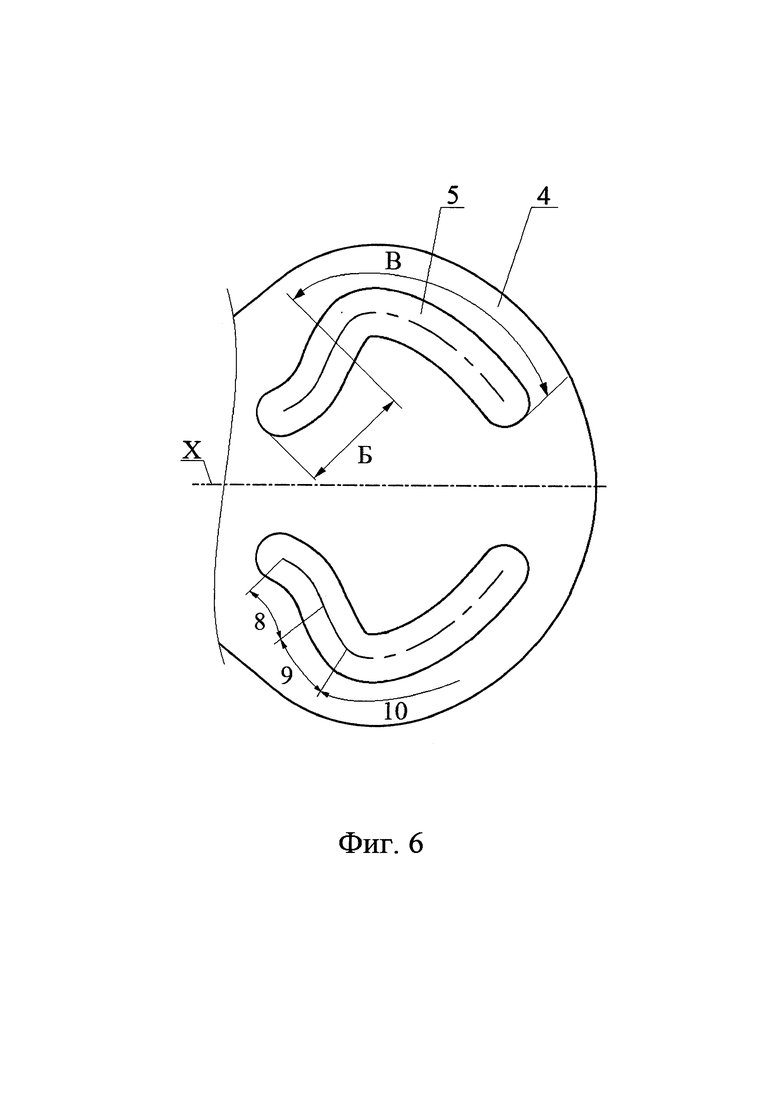
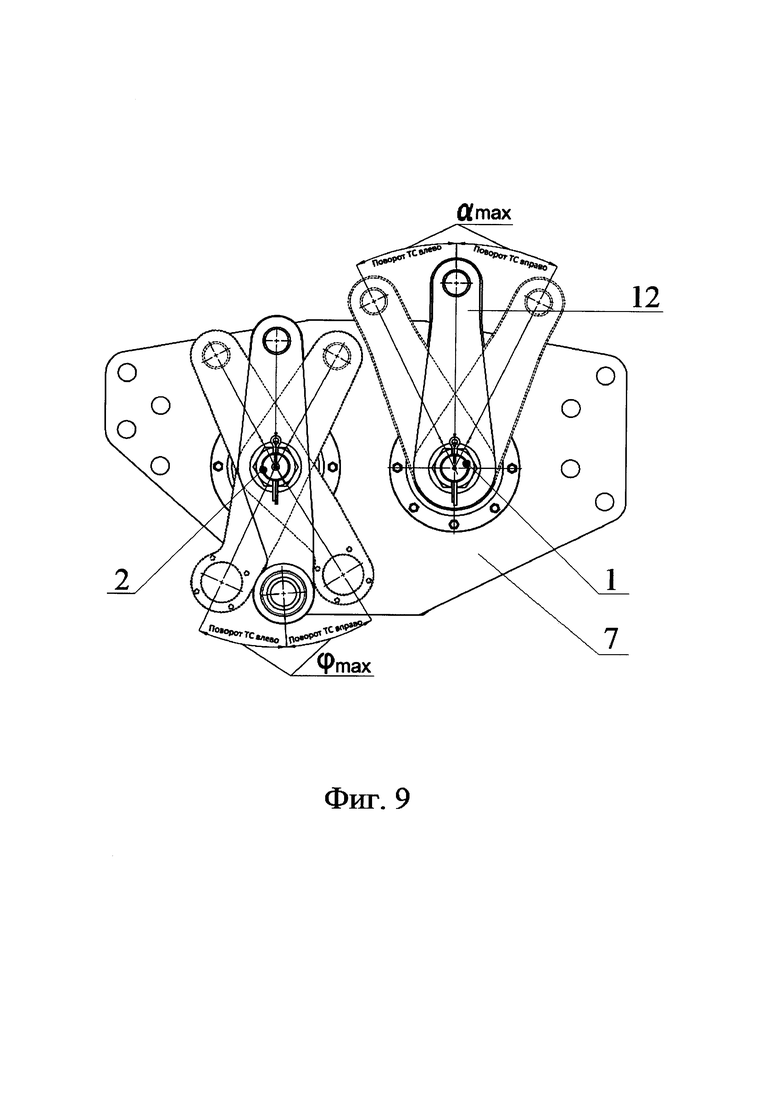
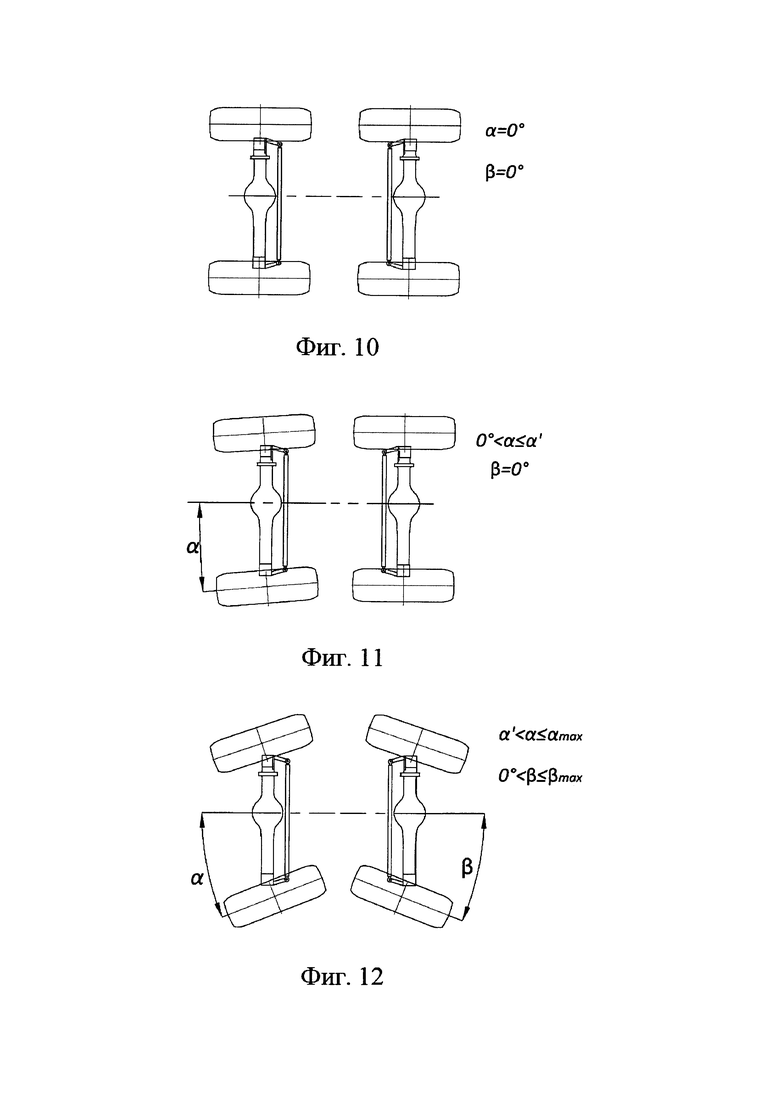
Изобретение поясняется чертежами, где на фиг. 1 показан механизм передачи вращательного движения с запаздыванием; на фиг. 2 показан вид А на фиг. 1 при нейтральном положении валов; на фиг. 3 - то же при повороте ведущего вала на угол α'; на фиг. 4 - то же при повороте ведущего вала на угол свыше α'; на фиг. 5 - то же при повороте ведущего вала на угол αmax; на фиг. 6 показан сектор с пазами; на фиг. 7 показаны зоны перемещения роликов в пазах при повороте валов; на фиг. 8 показан механизм рулевого управления колесами заднего моста с запаздыванием; на фиг. 9 показан механизм запаздывания с рычагом; на фиг. 10 показано положение колес заднего и переднего мостов в нейтральном положении; на фиг. 11 - то же при повороте колес переднего моста на угол α; на фиг. 12 - то же при повороте колес переднего моста на угол до αmax.
Механизм передачи вращательного движения с запаздыванием (далее механизм запаздывания (задержки)) содержит два вала 1 и 2. Первый вал 1 (ведущий) имеет последовательно расположенные на своей оси, преимущественно, два зеркальных радиально выступающих элемента - щеки 3. Вал 1 может иметь также одну щеку 3, либо три щеки 3, либо другое количество в зависимости от принимаемой нагрузки. Второй вал 2 (ведомый) имеет, преимущественно, посередине радиально выступающий элемент - сектор 4 («качалка»), расположенный между щеками 3 (фиг. 1). Вал 2 может иметь также два или три или другое количество секторов 4 в зависимости от количества выполнения щек 3 на валу 1. При этом, в случае, если вал 1 имеет одну щеку 3, то он также имеет опору, расположенную параллельно щеке 3 (не показана). В данном случае вал 2 имеет один сектор 4, расположенный между щекой 3 и опорой. В случае, если вал 1 имеет три щеки 3, то они расположены последовательно на своей оси (также как и при варианте с двумя щеками 3). В данном случае вал 2 может иметь два сектора 4, которые расположены между соответствующими щеками 3.
Вне зависимости от того сколько секторов 4 имеет вал 2, каждый сектор 4 имеет сквозные криволинейные пазы 5 (специальные прорези), расположенные симметрично друг другу относительно плоскости X, проходящей через ось вала 2 и перпендикулярной плоской поверхности сектора 4 (фиг. 2, 6). Каждый паз 5 имеет, преимущественно, два участка Б и В (фиг. 6). Первый участок Б расположен ближе к валу 2 и выполнен вогнутым в сторону плоскости X симметрии. С участком Б сопряжен второй участок В, который выполнен вогнутым в сторону от плоскости X симметрии и расположен дальше от вала 2. Концы каждого паза 5 расположены ближе к плоскости X симметрии, чем его средняя часть. Каждый паз 5 имеет одинаковую ширину на протяжении всех своих участков.
В каждом пазу 5 размещен контактный ролик 6, установленный и зафиксированный в отверстиях (не показаны) щек 3 с возможностью вращения. При нейтральном положении валов 1 и 2, когда ось вала 1 лежит в плоскости X симметрии, контактные ролики 6 расположены в пазах 5 в месте изменения знака кривизны паза 5 на границе первого и второго участков Б и В. Ролики 6 размещены в пазах 5 (пронзают пазы 5) с возможностью поворота вала 2 при повороте вала 1 на угол более α', равный 2°, но не более αmax на который способен повернуться вал 1.
Криволинейная форма пазов 5 с участками А и Б обусловлена геометрией двух траекторий, симметричных относительно плоскости X симметрии. Эти траектории можно разбить на зоны 8, 9 и 10 (фиг. 7). Зоны 8 и 10 определяют закон, по которому происходит поворот ведомого вала 2. В зоне 9 поворот ведомого вала 2 не осуществляется, а происходит запаздывание поворота (задержка). Центр участка 9 - начальное положение механизма запаздывания.
Положение контактных точек Т1 и Т2 роликов 6 с пазами 5 на ведущем валу 1 соответствует центрам зон 9, при этом угол αmax - максимальный угол поворота вала 1 в одну из сторон, а угол α' - угол задержки (фиг. 7).
Зона 10 образуется в результате совместного вращения валов 1 и 2 и является траекторией пути контактной точки Т2 при условии, что траектория пути контактной точки Т1 известна (зона 8).
Зона 8 имеет дугообразную форму, вогнутая сторона которой направлена в сторону плоскости X симметрии; зона 9 имеет, преимущественно, немного вогнутую в сторону от плоскости X симметрии форму и плавно сопряжена с зоной 8; зона 10 имеет дугообразную форму, вогнутая сторона которой направлена в сторону от плоскости X симметрии и плавно сопряжена с зоной 9.
Механизм запаздывания имеет корпус 11 с посадочными местами (не показаны) для валов 1 и 2.
Механизм запаздывания поворота колес заднего моста обеспечивает условие поворота колес заднего моста на заданный угол.
Механизм рулевого управления колесами заднего моста содержит последовательно связанные между собой тягами 11 рычаги 12, один из которых связан с механизмом запаздывания поворота колес заднего управляемого моста (фиг.8, 9). При этом механизм запаздывания выполнен вышеуказанным образом, а ведущий вал 1 соединен с рычагом 12 с возможностью поворота при воздействии системой тяг 11 и рычагов 12.
Механизм интегрируется в систему 13 рулевого управления базового шасси транспортного средства (ТС) и позволяет снизить показатели радиуса разворота ТС за счет осуществления поворота колес переднего и заднего мостов, при этом поворот колес заднего моста происходит с задержкой и последующей компенсацией (полной, избыточной или недостаточной) этой задержки.
Алгоритм работы проиллюстрирован на фиг. 10-12 на примере поворота ТС в одну из сторон:
1) Изначально руль стоит ровно (нейтральное положение), угол а поворота колес равен нулю.
2) Далее происходит поворот руля, вследствие чего колеса переднего моста поворачиваются на угол α до значений α', при этом задние колеса по-прежнему располагаются прямо. Угол поворота α' задается конструктором в зависимости от конструкции ТС.
После того, как значения угла α' превышены начинается процесс поворота задних колес. В ходе этого процесса происходит плавная компенсация разницы углов поворота аир таким образом, что в результате αmax=βmax.
На фиг. 9 показана работа механизма запаздывания в составе рулевого управления:
- рычаг 12 ведущего вала 1 приводится в движение тягами 11, связанными с аналогичным рычагом 12 штатного рулевого управления.
- далее посредством жесткой связи, реализованной в механизме запаздывания, происходит поворот ведомого вала 2 по закону, позволяющему удовлетворить алгоритм поворота колес, описанный выше.
Алгоритм работы механизма запаздывания (при повороте в одну из сторон) показан на фиг. 2-5:
Фиг. 2: валы 1 и 2 выставлены в начальное (нейтральное) положение;
Фиг. 3: ведущий вал 1 поворачивается на угол задержки α', ведомый вал 2 неподвижен;
Фиг. 4: ведущий вал 1 поворачивается на угол α'' (более, чем α'), ведомый вал 2 приходит во вращение, достигая при этом требуемых значений ϕ.
Фиг. 5: ведущий вал 1 поворачивается на угол αmax, ведомый вал 2 приходит во вращение, достигая при этом требуемых значений αmax.
Благодаря такому выполнению механизма рулевого управления с механизмом передачи вращательного движения с запаздыванием обеспечивается жесткая механическая связь всех элементов. В результате, при движении ТС на высоких скоростях (свыше 75 км/ч) и при его повороте на таких скоростях, в том числе при движении на неровных поверхностях дороги (кочки, ямы), обеспечивается передача движений всех элементов механизма без искажения заданной траектории. Механические связи обеспечивают необходимое перемещение элементов механизма запаздывания на необходимый угол, с точным соблюдением необходимой траектории перемещения колес заднего управляемого моста относительно колес переднего моста. Благодаря наличию жестких механических связей и полного отсутствия гидравлических связей существенно упрощается конструкция механизма и одновременно повышается его надежность и работоспособность на высоких скоростях. В случае выхода из строя любого механического элемента он легко и быстро заменяется, в результате чего отсутствует необходимость долгосрочного ремонта. При этом сохраняются высокая маневренность и управляемость ТС на высоких скоростях.
Механизм передачи вращательного движения с запаздыванием, помимо его использования в составе механизма рулевого управления колесами, может использоваться и в других механизмах с целью осуществления запаздывания поворота одних элементов относительно других.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОУСИЛИТЕЛЬ РУЛЯ С ТРЕХФАЗНЫМ РЕЖИМОМ РАБОТЫ, ЗОЛОТНИКОВЫЙ МЕХАНИЗМ С ЗАМКНУТЫМ ЖИДКОСТНЫМ КОНТУРОМ | 2004 |
|
RU2292285C2 |
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОУСИЛИТЕЛЕМ | 2006 |
|
RU2319630C1 |
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОУСИЛИТЕЛЕМ | 2006 |
|
RU2319632C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2001 |
|
RU2196696C1 |
| АНТИБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА С УСТРОЙСТВОМ ДЛЯ ПОВЫШЕНИЯ ПОВОРАЧИВАЕМОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2289518C1 |
| УПРАВЛЯЕМЫЙ МОСТ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2000 |
|
RU2247674C2 |
| ИНТЕГРАЛЬНЫЙ РУЛЕВОЙ МЕХАНИЗМ | 1995 |
|
RU2091264C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| РУЛЕВОЙ МЕХАНИЗМ ДЛЯ ВЕЗДЕХОДА И ГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ СИСТЕМА С ТАКИМ РУЛЕВЫМ МЕХАНИЗМОМ | 2022 |
|
RU2788245C1 |
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОУСИЛИТЕЛЕМ | 2006 |
|
RU2319633C1 |




Изобретение относится к области транспортного машиностроения, в частности к рулевому управлению транспортных средств. Механизм передачи вращательного движения с запаздыванием содержит два вала (1, 2). Вал (1) имеет по меньшей мере одну щеку (3), а вал (2) - по меньшей мере один выступающий сектор (4). Сектор (4) имеет криволинейные пазы (5). Пазы (5) расположены симметрично друг другу относительно плоскости, проходящей через ось вала (2). Каждый паз (5) имеет два участка. Первый участок, расположенный ближе ко второму валу (2), выполнен вогнутым, а второй участок - выгнутым в сторону плоскости симметрии. Концы каждого паза (5) расположены ближе к плоскости симметрии, чем его средняя часть. В каждом пазу (5) размещен ролик (6), установленный по меньшей мере на одной щеке (3). Механизм рулевого управления колесами заднего моста содержит последовательно связанные между собой тягами (11) рычаги (12). Один из рычагов связан с механизмом передачи вращательного движения с запаздыванием, который выполнен вышеуказанным образом. При этом один из валов (1, 2) соединен с рычагом (12). Достигается повышение надежности. 2 н. и 2 з.п. ф-лы, 12 ил.
1. Механизм передачи вращательного движения с запаздыванием, содержащий два вала, первый из которых имеет по меньшей мере одну щеку, а второй - по меньшей мере, один выступающий сектор, имеющий криволинейные пазы, расположенные симметрично друг другу относительно плоскости, проходящей через ось второго вала, причем каждый паз имеет два участка, первый участок, расположенный ближе ко второму валу, выполнен вогнутым в сторону плоскости симметрии, а сопряженный с ним второй участок выполнен вогнутым в сторону от плоскости симметрии, концы каждого паза расположены ближе к плоскости симметрии, чем его средняя часть, а в каждом пазу размещен ролик, установленный по меньшей мере на одной щеке и расположенный в месте изменения знака кривизны паза на границе первого и второго участков при нейтральном положении валов, когда ось первого вала лежит в указанной плоскости симметрии.
2. Механизм по п. 1, отличающийся тем, что ролики размещены в пазах с возможностью поворота одного вала при повороте другого вала на угол более 2°.
3. Механизм рулевого управления колесами заднего моста, содержащий последовательно связанные между собой тягами рычаги, один из которых связан с механизмом передачи вращательного движения с запаздыванием, отличающийся тем, что механизм передачи вращательного движения с запаздыванием выполнен по любому из пп. 1, 2, при этом один из валов соединен с указанным рычагом.
4. Механизм по п. 3, отличающийся тем, что с рычагом соединен первый вал.
| СВЯЗЬ С УГЛОВЫМ КОРРЕКТИРУЮЩИМ УСТРОЙСТВОМ МЕЖДУ ДОРОЖНЫМИ МОДУЛЯМИ, СОПРЯЖЕННЫМИ МЕЖДУ СОБОЙ САМОНЕСУЩИМ ПРОМЕЖУТОЧНЫМ МОДУЛЕМ | 1995 |
|
RU2140856C1 |
| DE 3820967 A, 12.01.1989 | |||
| RU 2012133471 A, 27.02.2014 | |||
| WO 2003037663 A1, 08.05.2003. | |||

