Настоящее изобретение касается связи с угловым корректирующим устройством, расположенной между двумя сопрягающимися дорожными модулями, связанными между собой с возможностью поворота посредством самонесущего промежуточного модуля, образующего один из узлов шарнирно сочлененного дорожного транспортного средства.
Идеальные свойства на поворотах дорожных транспортных средств, имеющих шарнирное сочленение и образуемых несколькими последовательно расположенными модулями или перевозочными средствами, состоят в обеспечении межмодульного шарнирного соединения, при котором закон углового отклонения модулей между собой обеспечивает постоянную направленность осей к центру поворота.
Транспортные средства с таким свойством именуются транспортными средствами с радиальными осями.
Данное свойство представляет интерес в отношении городских транспортных средств, так как оно позволяет обойтись минимальным динамическим отводом земли на поворотах.
Однако указанное свойство оказывается недостаточным для шарнирно сочлененных транспортных средств с несколькими последовательно расположенными модулями, из которых один модуль занимает промежуточное положение, характеризующимися более или менее значительным вилянием на выходе из кривой, сопровождающимся более или менее выраженным боковым смещением.
Так обстоит дело с дорожными шарнирно сочлененными транспортными средствами, каждый модуль которых разделен с соседним посредством промежуточного модуля, установленного на оси и связанного с обоими соседними модулями посредством поворотного шарнирного сочленения, имеющего в качестве дополнительного кинематического напряжения жесткую наклонную связь на каждом модуле, обеспечивающую непосредственное соединение между собой двух последовательно расположенных модулей с помощью связи в виде шарового шарнира на каждом ее конце.
Несмотря на наличие наклонной жесткой связи, поведение дорожных, шарнирно сочлененных транспортных средств данного типа характеризуется наличием довольно серьезных недостатков, послуживших причиной создания данного изобретения.
Во-первых, в отношении таких шарнирно сочлененных дорожных комплексов при их движении по прямой и при достижении определенной скорости отмечаются заносы, снижающие безопасность пассажиров.
Во-вторых, чисто кинематическое свойство межмодульных шарнирных связей вызывает отклонения в виде рыскания на выходе из поворотов, в особенности наружный занос на крутом повороте, в результате чего при определенных условиях может быть превышен допустимый предел.
Первый недостаток можно устранить за счет блокирования поворотного движения одного из поворотных шарниров, например, шарнира переднего модуля, обеспечив конфигурацию "автомобиль + прицеп". Из практики известна устойчивость такого объединения, сохраняющаяся при допустимой максимальной рабочей скорости.
Такое блокирование механически ведет к отводу большей площади на крутых виражах.
Однако, как уже отмечено выше, при современном уличном движении в городе под пассажирские транспортные средства на кривых участках должна отводиться минимальная площадь.
Приведенные требования вкупе не позволяют рассматривать использование единственного, указанного выше приема блокирования одного шарнира на сочлененном городском средстве пассажирских перевозок на искривленных участках, поскольку оно не обеспечит гарантированного минимального отвода площадей по всему маршруту движения.
Настоящее изобретение ставит своей целью одновременное устранение указанных выше обоих недостатков, а именно: потеря устойчивости при движении на прямолинейном участке по достижении определенной скорости и боковое смещение на выходе из поворота, обеспечивая достижение идеальных дорожных свойств, отвечающих требованиям и положениям об общественном транспорте в городских условиях.
Данное изобретение представляет собой общее усовершенствование составных шарнирных связей между двумя последовательными модулями одного и того же шарнирно сочлененного дорожного транспортного средства, связанными между собой промежуточным самонесущим, движущим или буксируемым модулем.
Такое общее усовершенствование, использованное в данном типе шарнирных связей между двумя последовательными модулями, передним и последующим, разделенными промежуточным модулем, с которым каждый из этих модулей связан посредством поворотного шарнира, отличается тем, что связь, шарнирно сочлененная через промежуточный модуль и поворотные шарниры, дополнительно имеет связь угловой коррекции, обладающую зоной низкой чувствительности по отношению к центру по обе стороны от направления прямой линии, для управления ориентацией переднего модуля на основе ориентации последующего модуля.
Остальные технические данные и преимущества изобретения изложены в описании ниже, приводимого в качестве примера и дополненного чертежами, где на:
- фиг. 1 схематически показан общий вид в плане шарнирной связи между двумя последовательными модулями, имеющей вид функциональных блоков;
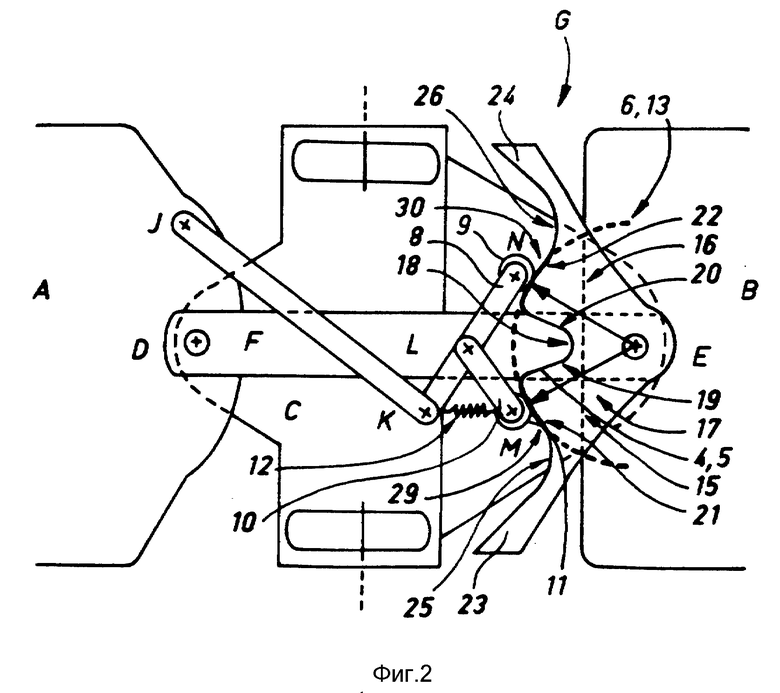
- фиг. 2 схематически показан вид в плане варианта исполнения с кулачком и общая форма его профиля;
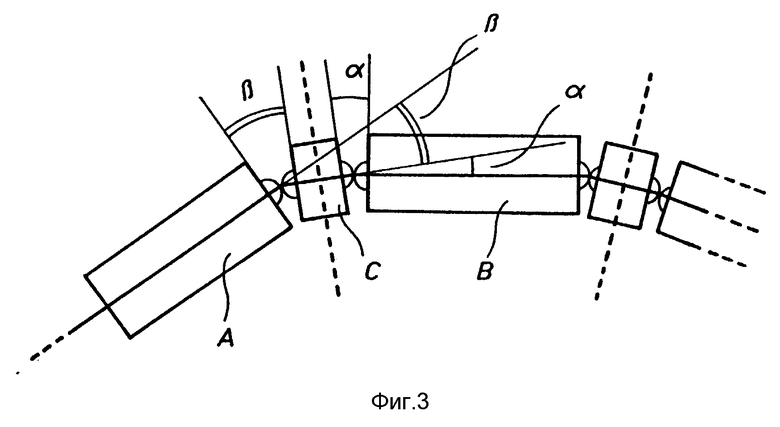
- фиг. 3 изображена схема для определения углов α и β;
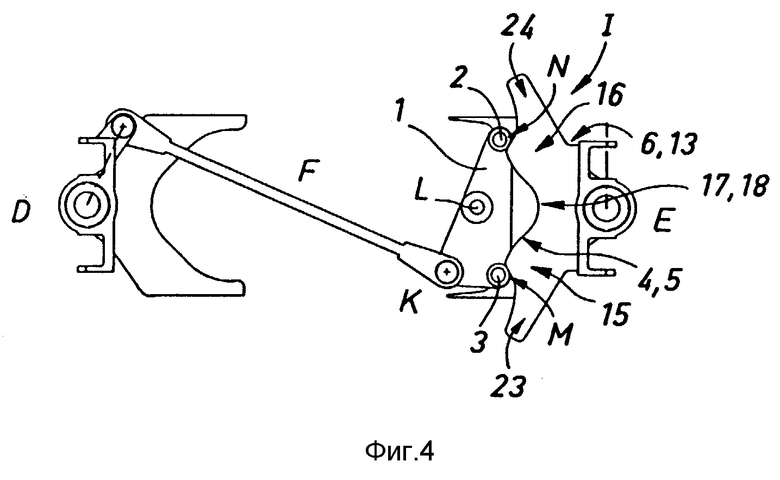
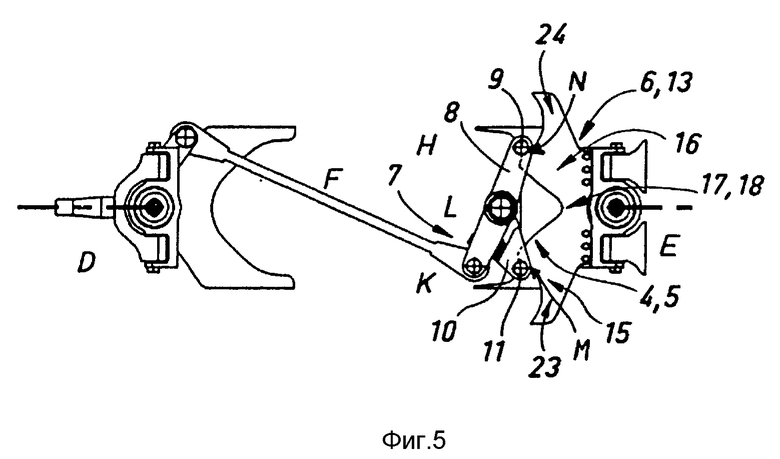
- фиг. 4, 5 и 6 показан вид в плане шарнирных связей, соответствующих реальным формам кулачка или прорези со следящим пальцем;
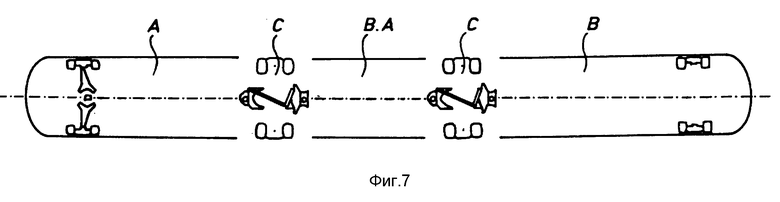
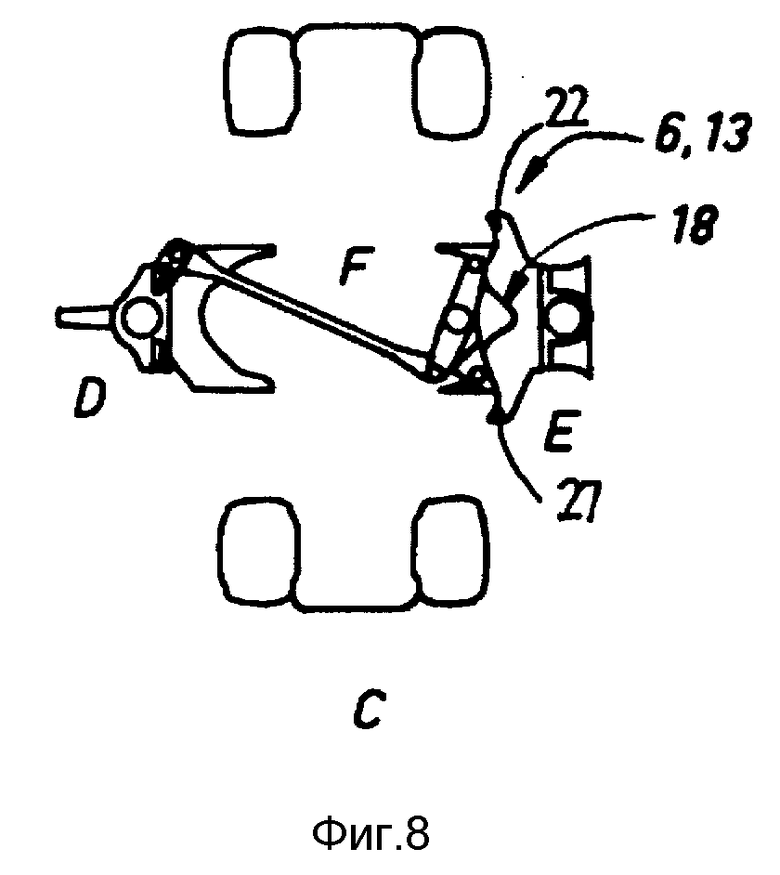
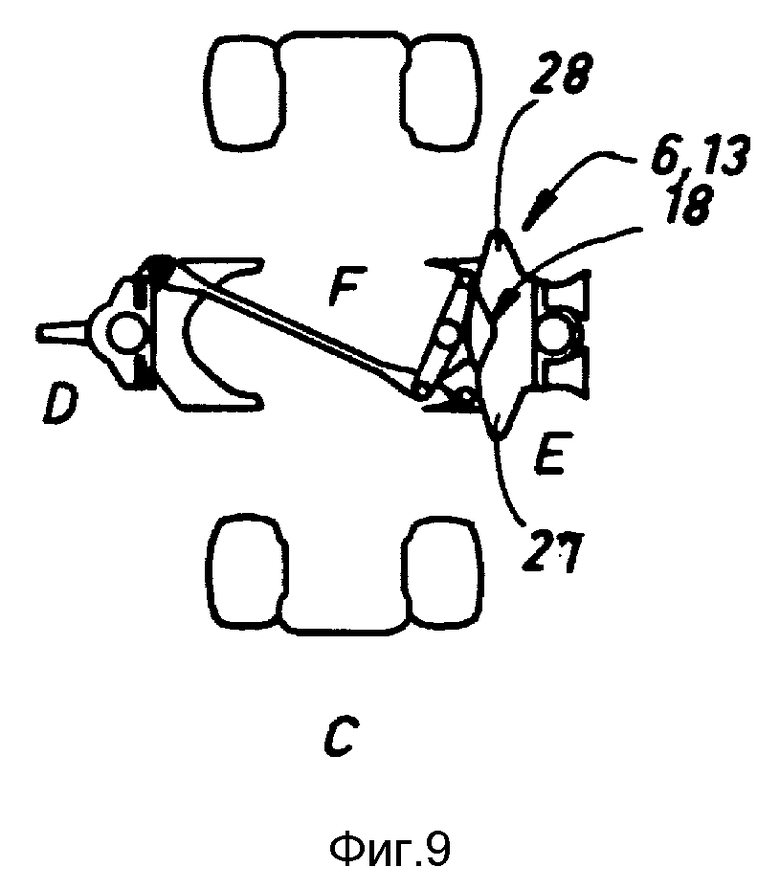
- фиг. 7, 8 и 9 показаны в плане автопоезд в виде прямой линии, образованный тремя модулями, с детальным изображением каждой межмодульной шарнирной связи;
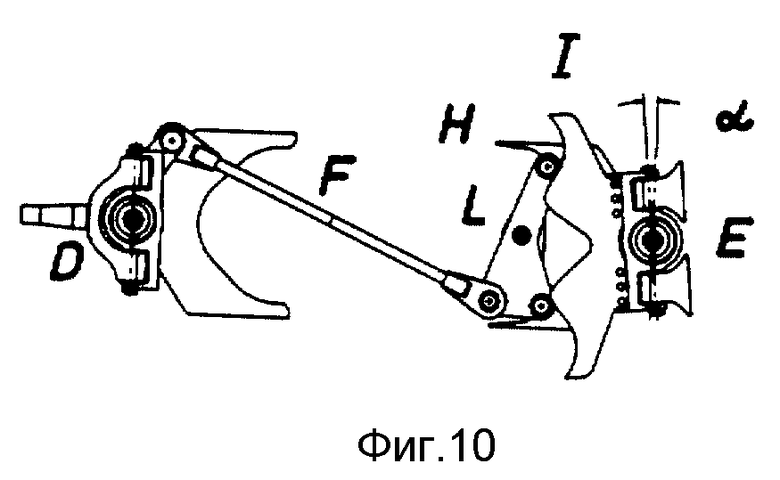
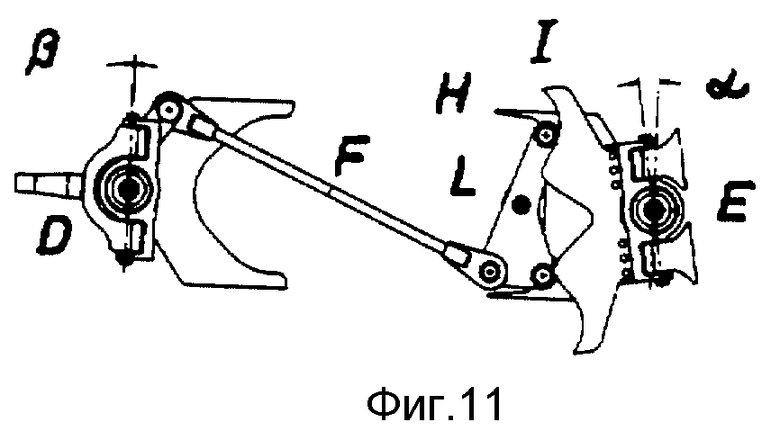
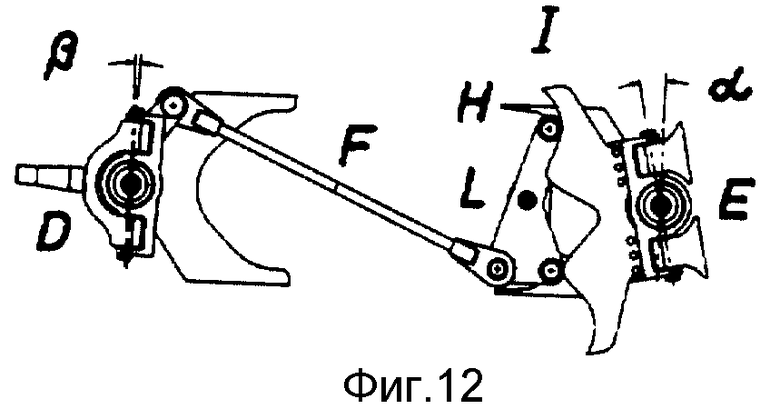
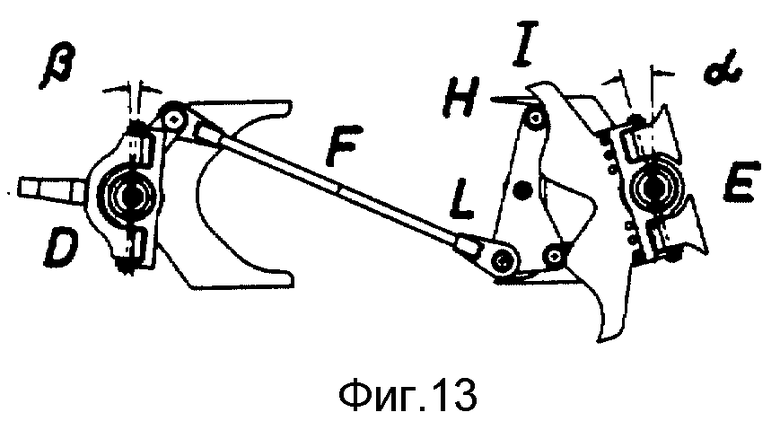
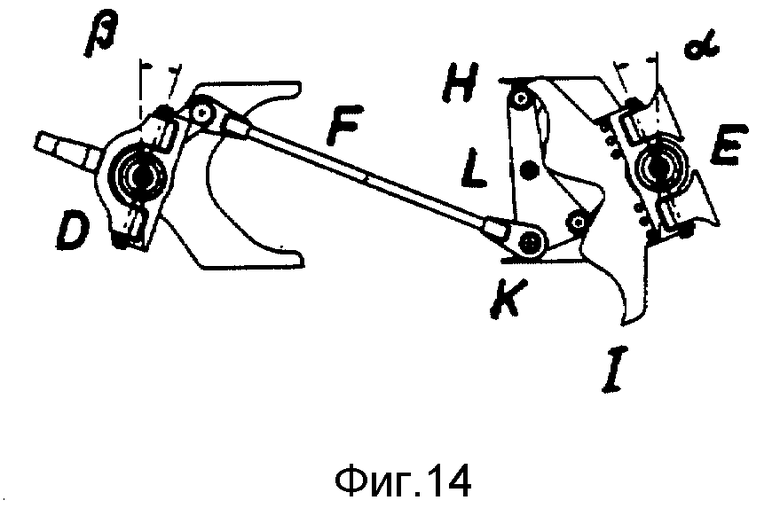
- фиг. 10 - 14 схематически представлена серия видов, изображающих работу кулачкового механизма и изменение величины углов α и β;
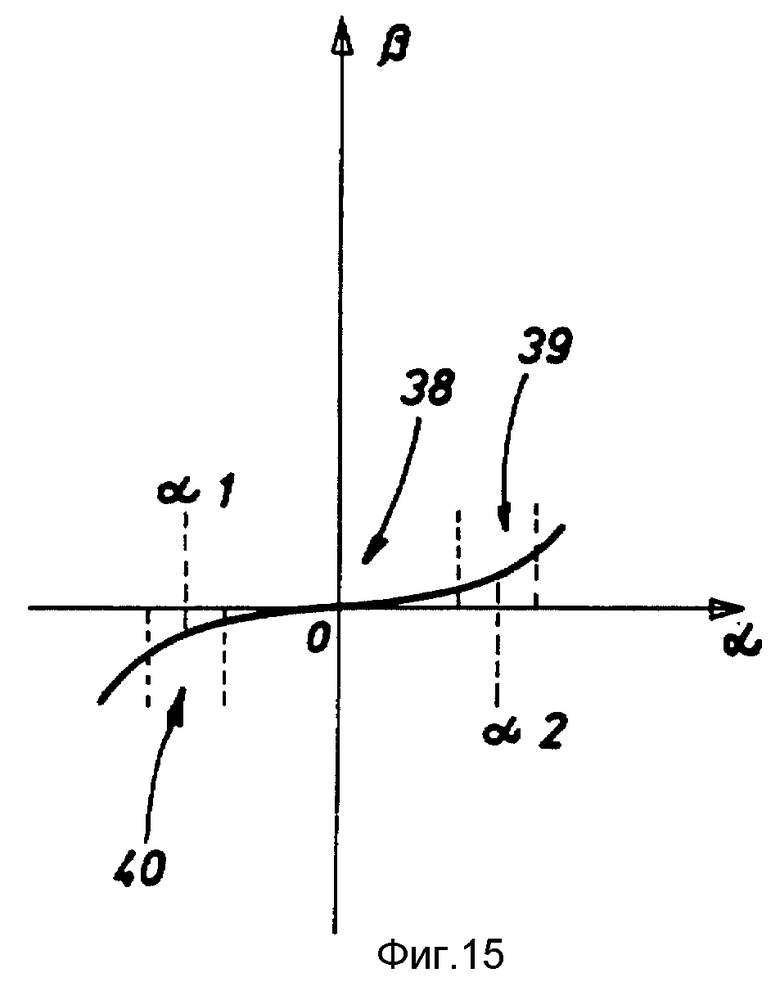
- фиг. 15 показан пример, иллюстрирующий характеристику кривой в зависимости от отношения между величинами углов α и β.
Настоящее изобретение применимо для шарнирно сочлененных дорожных транспортных средств, состоящих из множества модулей, связанных между собой межмодульным составным шарниром. Такой межмодульный составной шарнир состоит в принципе из расположенного между передним модулем A и последующим модулем В самонесущего промежуточного модуля C, шарнирно связанного с обоими модулями A и B посредством шарнира, соответственно переднего D и последующего E, поворотного вокруг вертикальной оси.
Изобретение применимо преимущественно для межмодульного составного шарнира, имеющего дополнительно жесткую наклонную связь, шарнирно сочлененную каждым своим концом с обоими модулями A и B, образующими блок шарнирно сочлененного дорожного транспортного средства. Связь угловой коррекции согласно изобретению, предусмотренная между модулями A и B, шарнирно сочлененными между собой промежуточным модулем C, проистекает из общего изобретательского замысла, заключающегося в том, чтобы предусмотреть наличие между передним модулем A и последующим B связи угловой коррекции, обеспечивающей угол β между передним модулем A и промежуточным модулем C (фиг. 3) в соответствии с законом углового отклонения как функции угла α между промежуточным модулем C и последующим модулем B (фиг. 3). Данный закон предусматривает наличие центральной зоны с небольшим или нулевым уклоном при значениях α менее заданной величины, данная центральная зона характеризуется функцией зависимости между углами α и β, при которой эффект виляния модулей существенно снижен.
Все происходит таким образом, как если бы составная шарнирная связь была типа "автомобиль + прицеп" в виде прямой линии и при небольших углах поворотов, т. е. как если бы передний шарнир D был заперт или блокирован, обуславливая наличие жесткой связи между передним и промежуточным модулями до момента достижения предельной угловой величины, начиная с которой угол β становится возрастающей функцией угла виража.
Эта выходная часть зоны с малой чувствительностью по отношению к угловому изменению соответствует изменению дорожной характеристики между так называемым режимом "автомобиль + прицеп" и другим так называемым режимом "управляемое отклонение".
Согласно конструкции межшарнирная линия D - E представляет собой отрезок прямой постоянной длины "d".
Как уже указывалось выше, данный тип связи нуждается на выходе из криволинейных участков пути в адаптированной угловой коррекции, нейтрализующей виляние, обусловленное особенностью межмодульной шарнирной связи, применяемой на составных транспортных средствах с шарнирным со членением, предусмотренных настоящим изобретением.
В целом корректирующая цепь согласно изобретению состоит из жесткой связи F, например, наклонно выполненной, между модулем A и блоком, представляющим собой корректирующее устройство G и изменяющим угловую ориентацию модуля A по отношению к модулю C в зависимости от ориентирующей функции модуля B по отношению к модулю C.
Указанное устройство G представляет собой чисто механическое устройство, т. е. с механическим управлением, но оно может управляться и посредством компьютера с использованием датчика или любой другой специальной управляющей системы.
Его функция состоит в корректировке положения, которое заняли бы при ориентации модули на виражах и, преимущественно, на выходе из криволинейных участков пути, если бы составной межмодульный шарнир содержал только те средства, которые известны благодаря данному изобретению.
Общее схематическое изображение на фиг. 1 имеет своей целью подчеркнуть общий характер изобретения.
В общем, устройство G является угловым корректирующим устройством, изменяющим характеристику и, в особенности, угловое выражение модуля A по отношению к модулю C, либо угол β, в зависимости от управляющего положения модуля B по отношению к модулю C, либо угол α, на кривой и на выходе из нее. Управляющая команда передается по наклонной связи F, предусмотренной между передним модулем A и устройством G или датчиком углового отклонения или любым другим средством, предназначенным для подачи информации о величине угла α.
Такая информация обеспечивается благодаря наклонной жесткой связи F, соединяющей передний модуль A и устройство G, которая в соответствии со специальным вариантом исполнения выполнена в виде тяги, концы которой шарнирно соединены с каждым из указанных устройств.
Корректирующее устройство G состоит из двух блоков: отклоняющего устройства H и приводного устройства I, взаимодействующих между собой.
Отклоняющее устройство H шарнирно связано с передним модулем A посредством связи F, которая обеспечивает механическую передачу на указанный модуль команд угловой ориентации. Он выполнен подвижным и взаимодействует с приводным устройством I.
Приводное устройство 1 жестко связано с последующим модулем B. Он задает закон угловой коррекции и действует с шарнирной связью угловой коррекции в качестве привода с угловым уравновешиванием, обеспечивая изменение угла β и максимальную нейтрализацию виляний на выходе из виражей благодаря закону углового соответствия центральной зоне с низкой чувствительностью по отношению к небольшим угловым величинам виража как справа, так и слева.
Составная шарнирная межмодульная связь характеризуется двумя режимами работы в зависимости от величины угла при движении по виражу:
- режим "автомобиль + прицеп" при малых значениях углов отклонения последующего модуля B по отношению к модулю C, т.е. угол α, режим, при котором поворотные движения промежуточного модуля C по отношению к переднему модулю A, соответствующие углу β, почти нейтрализованы при незначительных величинах угла α, в то время как движения последующего модуля B остаются свободными по отношению к промежуточному модулю C;
- режим, задаваемый при более значительных углах α отклонения последующего модуля B по отношению к промежуточному модулю C, режим, при котором поворотные движения промежуточного модуля C по отношению к переднему модулю A являются функцией угла α и при котором они задаются этим углом.
Переход от одного режима к другому происходит по переходной зоне, расположенной на конце центральной зоны, как это видно из фиг. 15.
Рассмотрим теперь изобретение с точки зрения его специальных средств, пользуясь детальным описанием нескольких механических вариантов.
Обратимся прежде всего к рисункам 2, 4 и 5.
Корректирующая цепь включает в себя в целом, прежде всего, наклонную шарнирную связь F, предназначенную для передачи команды ориентации, шарнирно установленную между передней точкой J шарнирного соединения, жестко закрепленной на корпусе переднего модуля A, и точкой K шарнирного соединения, жестко закрепленной на отклоняющем устройстве H, поворачивающегося вокруг вертикальной оси L, расположенной на промежуточном модуле C, секущая ось, для обеспечения симметрии, вместе с линией, соединяющей между собой шарниры D и Е.
Отклоняющее устройство H представляет собой качающийся шарнирный узел, соединенный с наклонной связью F и контактирующий с приводным устройством 1 посредством по меньшей мере одного элемента, перемещающегося по направляющей.
Здесь речь может идти прежде всего о поворотном вокруг оси L элементе 1, выполненном в виде треугольника, в основании которого располагаются средства качения, как, например, ролики 2 и 3, которые перемещаются по управляющей кромке 4 приводного устройства 1, имея с ней опорный контакт в точках M и N профиля 5 управляющего органа 6, жестко закрепленного на шасси модуля B, воздействующего на средства качения (фиг. 5).
Отклоняющее устройство H может быть также выполнено в виде шарнирно соединенного узла 7, представляющего собой простую тягу, поворачивающуюся вокруг оси качения L, один конец которой шарнирно сочленен с концом K наклонной передаточной тяги F, а второй конец несет на себе средство качения, например ролик 9. Вспомогательная тяга 10, установленная с возможностью поворота вокруг оси L, дополняет связь между осью качения L и вторым средством качения, также выполненным в виде ролика 11. Ролики 9 и 11 также находятся в опорном контакте в точках М и N с краем профиля 5 управляющего органа 6.
В целях предупреждения гиперстатического признака указанной связи тяги связаны между собой посредством пружины 12, как это показано на фиг. 2, обеспечивающей наличие постоянного контакта роликов.
Приводное устройство 1 выполнено в вариантах, представляющих собой кулачок 13 или направляющую 14, корпусы которых жестко связаны с последующим модулем В (фиг. 2, 4, 5, 6).
Общая идентичная форма технического выполнения профиля 5 кулачка может быть разной в зависимости от ее положения на сочлененном автопоезде с несколькими промежуточными модулями.
Кулачок привода ориентации в варианте исполнения с двумя роликами имеет общий, в значительной степени симметричный профиль 5, образованный двумя половинками 15 и 16. Центральная часть 17 указанного профиля имеет центральное, V-образное. более или менее выраженное углубление 18, более или менее расширенное. Каждая половинка 15 и 16 имеет последовательно расположенные в направлении к каждому концу кулачка 13 восходящий участок 19 и 20, участок кольцевого закругления 21, 22, участок схода 23, 24 соответствующей формы, например, в виде чашеобразного углубления, выпуклость которой ориентирована в ту же сторону, что и выпуклость центрального углубления 18, или наклонный участок 27, 28, как показано на фиг. 8 и 9.
Каждый из участков кольцевого закругления 21, 22, расположенных слева и справа, выполнен в виде дуги окружности 29 и 30. Эти дуги окружности одинаковы и имеют своим центром центр шарнира Е. Эти участки показаны на фиг. 2 жирной линией и каждый раз материализуются в виде стрелки.
Форма профиля кулачка может меняться в зависимости от частного достигаемого закона.
Она будет изменяться от одной межмодульной связи к другой на одном и том же сочлененном автопоезде при сохранении общих одинаковых очертаний. Действительно, вследствие соответствующего взаимодействия между модулями и для предупреждения движений виляния законы изменения углов и, следовательно, профили кулачков или их механических эквивалентов будут различаться между собой, как это видно на фиг. 7, 8 и 9, на которых показаны варианты формы профиля кулачка.
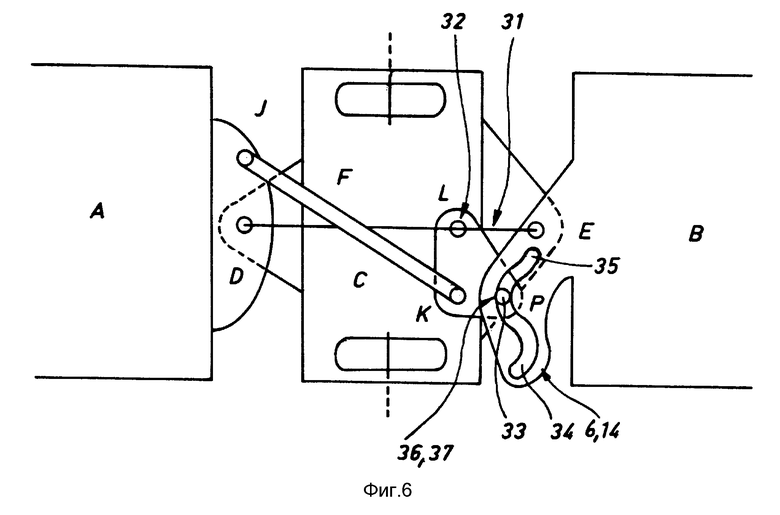
Вариант исполнения, представленный на фиг. 6, представляет собой функциональный эквивалент кулачковых механизмов. Согласно этому варианту отклоняющее устройство H выполнено в виде пластины 31, поворачивающейся вокруг вертикальной оси L, пересекающейся на участке 32 с линией D - E под действием приводного устройства I.
Данная пластина на своем свободном конце несет поперечный, расположенный перпендикулярно к своей плоскости элемент, например, следящий палец 33, конец оси или любое другое аналогичное средство, способное перемещаться по направляющей. В данном случае приводное устройство 1 выступает в качестве направляющего средства, например, направляющей, будучи выполненной в виде прорези 34, вдоль которой и перемещается следящий палец 33. Прорезь 34 выполнена в горизонтальной пластине, жестко закрепленной на шасси последующего модуля В. Форма указанной прорези соответствует в целом форме профиля 5 кулачка на одной из существенно симметричных половинок 15, 16, например, на левой.
Здесь же располагаются один из уклонов 35 центрального углубления 18 и кольцевой участок 36 в форме дуги окружности 37, имеющий общий центр с участком на кулачке.
Обратившись к фиг. 3. можно определить угол β, образуемый жесткой межшарнирной поворотной связью D-Е и осью переднего модуля A. Угол α определяют в виде угла между межшарнирной жесткой поворотной связью D-Е и осью последующего модуля В.
Углы β и α соответствуют также наклонам, присутствующим соответственно между передним модулем A и промежуточным C, а также между последним и последующим модулем В. В таком виде они показаны также на фиг. 3.
Согласно изобретению угол β является функцией угла α, а именно:
β = 0 или малой прогрессирующей величине, когда α1 ≤ α ≤ α2; β = f(α), когда α ≥ α2 или α ≤ α1
преимущественно при α1 = α2 при абсолютной величине.
Таким образом, функция имеет участок или центральную зону 38 с нулевой или малой величиной и с малым уклоном на участках, характеризуемых обоими величинами α и α2 (фиг. 15), и на каждом из этих концов имеется переходная зона 39 и 40.
Механический узел, образуемый наклонной тягой F, отклоняющим устройством H и приводом I, позволяет выполнить указанный закон, предельные величины которого, превышающие значения α1 и α2, и угловая функция определяются профилем кулачка.
Для достижения этой цели кулачок выполняется со значительно симметричным общим профилем, как описано выше, и с двумя существенно симметричными половинками. Аналогичный эффект достижим и при использовании профиля только одной половинки (фиг. 6).
Из этого рисунка легко можно понять, что начальные движения толкания или натяжения тяги F, т. е. движения, соответствующие начальным градусам угла α, не изменят или изменят в очень малой степени угол β. В таком случае движения углового отклонения аналогичны движениям связи типа "автомобиль + прицеп", в которой модули A и C выступают в качестве автомобиля, а модуль - в качестве прицепа.
В самом деле, на всем участке профиля кулачка, имеющем кольцевое закругление в виде дуги окружности с центром, совпадающим с центром поворота шарнира E, что частично показано штрихлинией, поворот будет передан качением роликов в точках М и N на том участке окружности, центр которого совпадает с центром поворота последующего модуля В, т. е. с центром шарнирного соединения Е. При более выраженном наклоне пара роликов отклонится еще больше, из которых один ролик достигнет концевых участков профиля кулачка, а другой - уклона центрального углубления, в результате чего обеспечивается изменение угла α в соответствии с требуемым законом (фиг. 10-14).
Вариант исполнения, представленный на фиг. 6, имеет такой кольцевой участок прорези, соответствующий малым величинам углов α при варианте "автомобиль + прицеп".
Незначительные движения роликов отклоняющего устройства по кольцевым участкам дорожки не оказывают существенного влияния на изменение ориентации переднего модуля A по отношению к промежуточному C. Таким образом, команда нейтрализуется при небольшой угловой амплитуде, непосредственно зависящей от протяженности выполненных в виде дуг окружности участков профиля кулачка. Все происходит таким образом, как если бы поворотный шарнир D был блокирован.
Когда значение угла α возрастает, кулачковый механизм вызывает изменение режима. Ролики выходят за пределы участка кольцевого закругления и перемещаются по участку рабочей дорожки профиля, которым изменяется величина угла β и в результате величина α становится зависимой от величины β в соответствии с законом, позволяющим ограничивать величину бокового виляния на выходе из криволинейных участков.
Согласно разработанному варианту наклонная тяга может применяться для обеспечения другого режима работы, лежащего за пределами сферы настоящего изобретения. В этом случае речь идет о тяге для использования в двух назначениях, при первом назначении тяга сохраняет неизменной длину и используется вместе с корректирующим устройством согласно изобретению, и при втором назначении длина тяги переменная, а автопоезд управляется посредством других средств без использования углового корректирующего устройства. Поочередно применяются тот или иной способ управления с использованием команды, позволяющей переводить тягу в свободное или фиксированное положение.
Связь с угловой коррекцией в соответствии с предлагаемым изобретением предусмотрена для двух модулей шарнирно-сочлененного автодорожного транспортного средства, переднего модуля А и последующего модуля В, соединенных между собой при помощи некоторого самонесущего промежуточного модуля С, по отношению к которому упомянутые модули А и В ориентированы соответственно под углами α и β, причем упомянутый промежуточный модуль С шарнирно связан с модулями А и В при помощи двух поворотных шарниров D и Е. Упомянутая связь с угловым корректором состоит из косой жесткой связи F, которая продолжается некоторым поворотным устройством Н, управляемым при помощи приводного устройства с профилированным кулачком для обеспечения угловой коррекции бокового заноса данного транспортного средства в соответствии с некоторым законом угловой коррекции, определяющим зависимость упомянутого угла β от упомянутого угла α и имеющим некоторую центральную зону с небольшим наклоном, завершающуюся на каждом из ее концов некоторой переходной зоной. Данное изобретение представляет интерес для конструкторов автодорожных шарнирно-сочлененных средств городского общественного транспорта. Технический результат - уменьшение радиуса поворота. 25 з.п. ф-лы, 15 ил.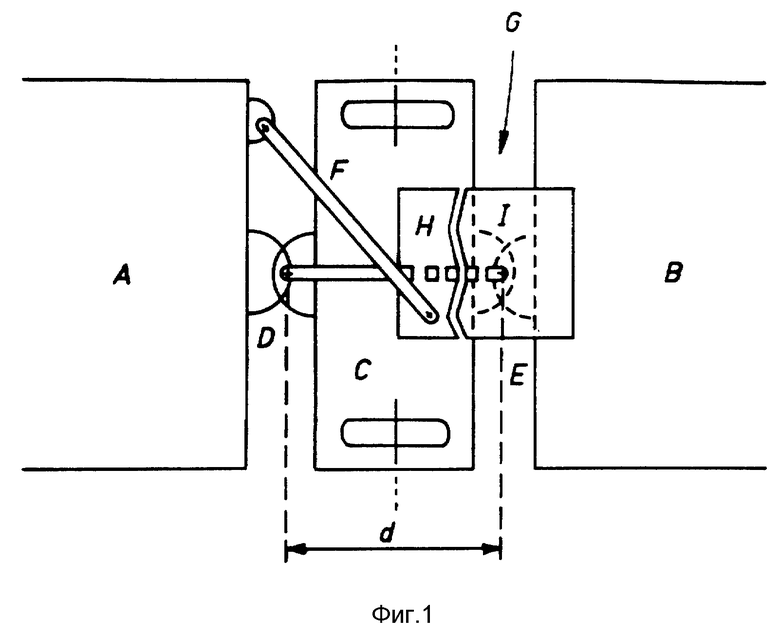
3. Составная шарнирная связь по п.1 или 2, отличающаяся тем, что связь угловой коррекции опирается на промежуточный модуль C.
| Автоматический выключатель к электрифицированным винтовым домкратам с гаечным башмаком | 1932 |
|
SU31596A1 |
| Устройство для стабилизации управляемых колес многозвенного транспортного средства | 1985 |
|
SU1293062A1 |
| Скреперный агрегат | 1984 |
|
SU1265257A1 |
| Опорно-сцепное устройство сочлененного транспортного средства | 1984 |
|
SU1237473A1 |
| Сцепное устройство для буксирования тягачом автомобиля | 1990 |
|
SU1756178A1 |
| Тягово-сцепное устройство | 1986 |
|
SU1342751A1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ЗОЛОТА ИЗ ОЧЕНЬ РАЗБАВЛЕННЫХ РАСТВОРОВ (МОРСКОЙ ВОДЫ) | 1925 |
|
SU4362A1 |

