Автоматизированный ортопедический аппарат внешней фиксации относится к медицинской технике и может найти применение в травматологии и ортопедии для фиксации костных отломков при переломах или операциях, связанных с удлинением конечностей.
Известен «Ортопедический аппарат остеосинтеза» (патент РФ 2339332, опубл. 27.11.2008, бюл. №16), содержащий подвижное и неподвижное кольца, между которыми установлены три электромеханических привода. Два из них соединены с кольцами с помощью трехстепенных шарниров, а третий (основной) - посредством фиксатора углового положения и двухстепенного шарнира. Каждый электромеханический привод содержит в своем составе самотормозящийся исполнительный механизм винт-гайка с резьбовыми роликами, промежуточный планетарный редуктор, шаговый микроэлектродвигатель и микропроцессорную систему управления, питаемую от малогабаритного аккумулятора.
Микропроцессорная система управления позволяет автоматизировать процесс лечения, а исполнительные механизмы винт-гайка с резьбовыми роликами вместе с промежуточным планетарным редукторов в составе электромеханических приводов обеспечивают необходимые микроперемещения и осевую силу на выходном штоке.
В предложенной конструкции, радиальные силы, действующие на шарнирно-стержневую систему аппарата со стороны конечности, воспринимаются только основным приводом, а два других разгружены, за счет их установки с помощью трехстепенных шарниров.
Главные недостатки аппарата - низкие надежность и ремонтопригодность при сравнительно большой массе и габаритных размерах. Поломка любого из трех приводов приведет к выходу из строя всего аппарата, ремонт которого из-за сложной конструкции провести в условиях медицинского учреждения не представляется возможным.
Наиболее близким аналогом является «Автоматизированный ортопедический аппарат остеосинтеза» (патент на полезную модель №165129, опубл. 10.10.2016, бюл. №28), содержащий электромеханический привод с самотормозящимся роликовинтовым исполнительным механизмом, кронштейны с костными резьбовыми стержнями, установленные на неподвижном и ходовом цилиндрах, систему регистрации осевых усилий с кольцевым датчиком, блоки управления и питания.
В патенте предложена компактная конструкция по схеме ходового цилиндра, повышенная надежность которой обеспечивается единственным приводом, к тому же с короткой кинематической цепью из-за отсутствия промежуточного редуктора, а ремонтопригодность - удобством демонтажа электродвигателя.
Главный недостаток такой конструкции состоит в том, что изгибающий момент от действующих сил со стороны конечности воспринимается не только неподвижным цилиндром, но и винтом роликовинтового механизма. Это приводит к повышению трения в резьбовых сопряжениях роликовинтового механизма, снижению КПД и может вызвать его заклинивание.
Кроме того, при необходимости ремонта аппарата в процессе лечения возникает проблема, состоящая в том, чтобы извлечь электромеханический привод из кронштейнов аппарата, установленного на пациенте, без нарушения относительного положения кронштейнов. Для сохранения заданного относительного положения кронштейнов требуется специальное фиксирующее приспособление.
Задачей изобретения является повышение надежности и ремонтопригодности конструкции автоматизированного ортопедического аппарата внешней фиксации.
Указанная цель достигается тем, что автоматизированный ортопедический аппарат внешней фиксации, содержащий электромеханический привод с самотормозящимся планетарным роликовинтовым исполнительным механизмом, шток которого соосно соединен со сменным ходовым цилиндром, два кронштейна для костных резьбовых стержней, один из которых установлен на неподвижном корпусе привода, другой - на ходовом цилиндре, два захвата к кронштейнам, кольцевой датчик осевых усилий, блок управления и питания, исполнительный механизм размещен в ступенчатой цилиндрической полости штока, связанного с оголовком ходовой гайки исполнительного механизма через первый трехстепенной шарнир и фиксатор поворота ходовой гайки, опорная гайка исполнительного механизма связана с неподвижным корпусом привода через второй трехстепенной шарнир и фиксатор поворота опорной гайки, каждый из фиксаторов выполнен в виде пружинного кольца с лапками, закрепленного от осевого перемещения, каждый захват имеет возможность присоединения и отсоединения от каждого кронштейна с возможностью установки и демонтажа между захватом и кронштейном корпуса электромеханического привода и сменного ходового цилиндра, на боковых поверхностях каждого из кронштейнов выполнены по два выступа, в одном из которых имеется отверстие под съемные шпильки, а в другом - круговой паз под съемные шпильки, центры отверстий и круговых пазов находятся на окружностях одинакового радиуса, с центрами, расположенными на общей оси корпуса привода и ходового цилиндра.
Сущность изобретения представлена в описании и иллюстрируется чертежами, на которых изображены:
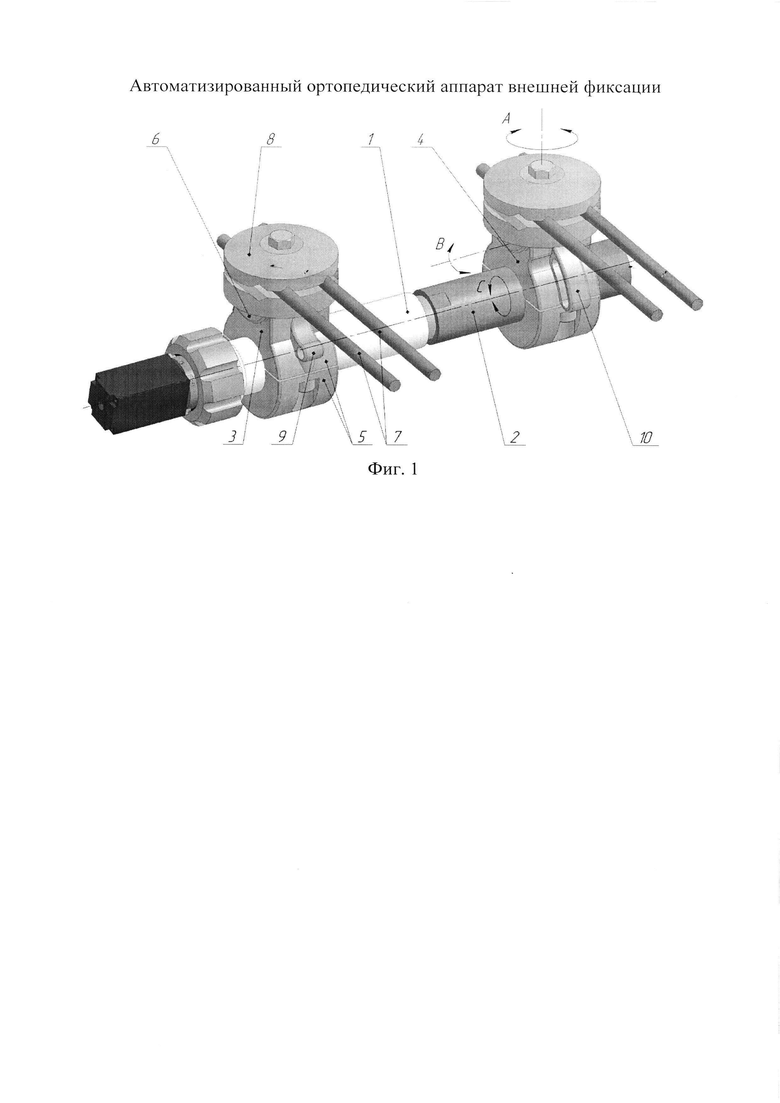
Фиг. 1 - общий вид автоматизированного ортопедического аппарата внешней фиксации;
Фиг. 2 - поперечный разрез электромеханического привода с ходовым цилиндром;
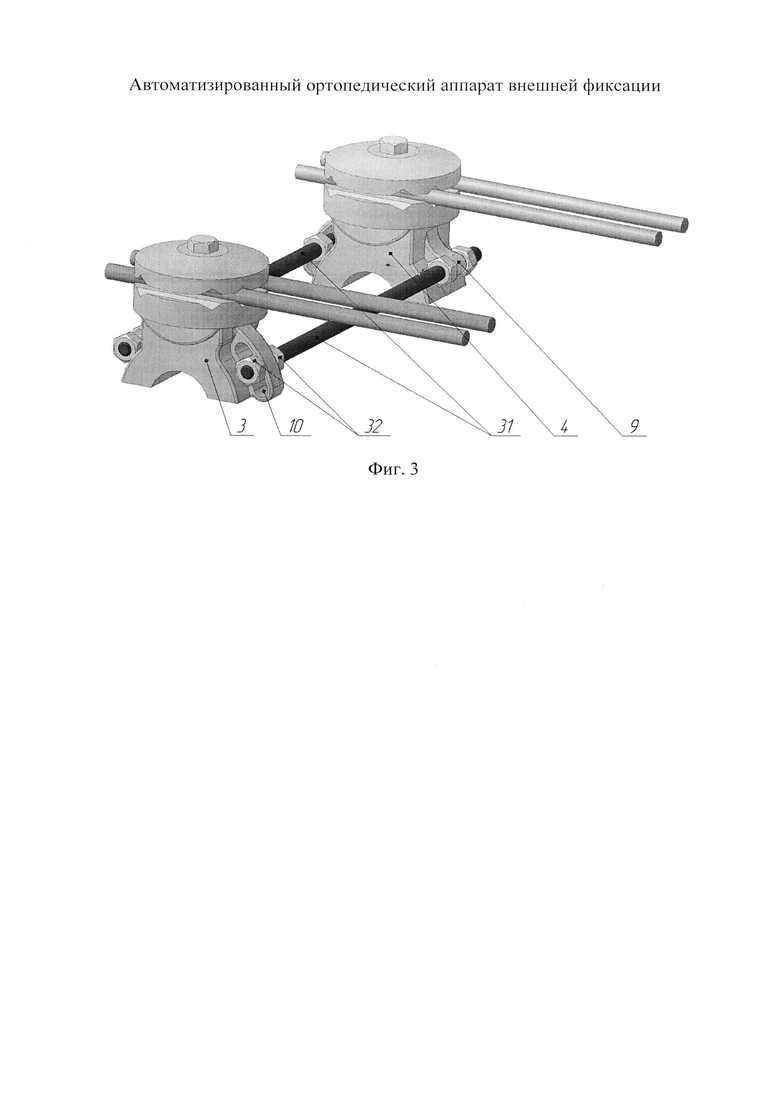
Фиг. 3 - общий вид кронштейнов со шпильками.
Автоматизированный ортопедический аппарат внешней фиксации (Фиг. 1) состоит из электромеханического привода (далее - привод) 1 и соосно соединенного с ним сменного ходового цилиндра 2. На приводе и ходовом цилиндре установлены кронштейны 3 и 4, каждый из которых состоит из захвата 5, с помощью которого кронштейн фиксируется на посадочной цилиндрической поверхности корпуса привода или ходового цилиндра, устройства регулировки отклонения 6 костных резьбовых стержней 7 и зажима 8. На боковых поверхностях кронштейнов выполнены по два выступа, один - с отверстием 9, другой - с круговым пазом 10. Центры одинаковых отверстий и круговых пазов обоих кронштейнов расположены на окружностях одинакового радиуса с центрами на общей оси привода и ходового цилиндра.
Внутри штока 11 (Фиг. 2) размещен исполнительный механизм электромеханического привода, выполненный в виде самотормозящегося планетарного роликовинтового механизма 12 (ПРВМ), состоящего из винта 13, резьбовых роликов 14 равной длины с винтом, опорной 15 и ходовой 16 гаек. Винт ПРВМ соосно соединен с валом электродвигателя 17.
Оголовок ходовой гайки 18 связан со штоком 11 через первый трехстепенной шарнир 19. Опорная гайка 15 ПРВМ связана с корпусом привода 20 с помощью второго трехстепенного шарнира 21.
Фиксатор поворота ходовой гайки, выполненный в виде пружинного кольца 22 с лапками, закреплен на оголовке ходовой гайки 18 винтом 23. Наружные лапки пружинного кольца входят в пазы на штоке 11, а внутренние - в пазы оголовка ходовой гайки.
На наружной поверхности штока 11 имеется шпоночный паз, в котором установлена шпонка 24, входящая в сквозной продольный паз 25 на корпусе привода 20.
Фиксатор поворота опорной гайки ПРВМ также выполнен в виде пружинного кольца 26 с лапками. Наружные лапки пружинного кольца входят в пазы кольцевого датчика осевых усилий 27, а внутренние - в пазы опорной гайки 15. Пружинное кольцо закреплено от осевого перемещения резьбовой бобышкой 28. Кольцевой датчик осевых усилий и трехстепенной шарнир 21 удерживаются от осевого перемещения гайкой 29. Электродвигатель 17 соединен с резьбовой бобышкой и зафиксирован стопорными винтами 30.
Отверстие 9 и круговой паз 10 (Фиг. 3) предназначены для фиксации заданного относительного положения кронштейнов 3 и 4 с помощью шпилек 31 с гайками 32.
Установка и работа автоматизированного ортопедического аппарата внешней фиксации осуществляется следующим образом.
Костными резьбовыми стержнями 7 (Фиг. 1), закрепленными в кронштейнах 3 и 4, костные отломки конечности (на чертеже не показано) фиксируются в заданном положении. Для этого с помощью устройства регулировки отклонения 6 костным резьбовым стержням придается нужное положение в кронштейнах по двум координатам (А и В), а регулировка по третьей координате (С) обеспечивается вращением кронштейнов вокруг общей оси привода 1 и ходового цилиндра 2. Кронштейны на приводе и ходовом цилиндре устанавливаются так, чтобы отверстие 9 на одном из кронштейнов находилось напротив кругового паза 10 на другом.
При вращении винта 13 ПРВМ от электродвигателя 17 резьбовые ролики 14 перекатываются по резьбам винта и опорной гайки 15, совершая планетарное движение. Из-за разности углов наклона резьб на ходовой гайке 16 и ходовом участке ролика, ходовая гайка, закрепленная от вращения шпонкой 24, совершает поступательное прямолинейное движение вместе со штоком 11 и ходовым цилиндром 2.
В предложенной конструкции изгибающий момент от сил, действующих со стороны конечности, будет восприниматься только корпусом привода 20 и штоком 11. Это обеспечивается тем, что трехстепенные шарниры 19 и 21 предотвращают изгиб блока резьбовых роликов 14 с винтом 13 ПРВМ, а ступенчатая цилиндрическая полость штока, расположенная между трехстепенными шарнирами, позволяет обеспечить такой угол поворота ПРВМ, при котором наружная цилиндрическая поверхность ходовой гайки 16 не касается внутренней поверхности штока. Таким образом, повышается надежность конструкции, так как изгиб блока резьбовых роликов с винтом, как и контакт наружной цилиндрической поверхности ходовой гайки с внутренней поверхностью штока, могут привести к повышению трения в резьбовых сопряжениях ПРВМ, снижению КПД привода и даже его заклиниванию.
При наличии самоторможения у ПРВМ такая конструкция аппарата позволяет произвести быструю замену электродвигателя 17 без снятия аппарата с конечности пациента и продолжить процесс лечения, не нарушая заданной программы.
Чтобы полностью демонтировать привод 1 с ходовым цилиндром 2 или переустановить в новое положение, без нарушения относительного расположения кронштейнов 3 и 4, в отверстие 9 и круговой паз 10 на кронштейнах устанавливаются шпильки 31 и фиксируются гайками 32. Круговой паз позволяет компенсировать возможное угловое смещение кронштейнов вокруг их общей оси относительно друг друга. Далее освобождаются захваты 5, и привод с ходовым цилиндром извлекаются из кронштейнов.
Аппарат может комплектоваться сменными ходовыми цилиндрами 2 нескольких типоразмеров по длине. Сменный ходовой цилиндр нужной длины подбирается лечащим врачом в зависимости от назначенной программы лечения. Для удобства снятия ходового цилиндра с привода 1 на наружных цилиндрических поверхностях ходового цилиндра и штока 11 имеются лыски под ключ.
Управление электромеханическим приводом осуществляется от микропроцессорной системы (на чертежах не показана), в соответствии с программой, заданной лечащим врачом. Микропроцессорная система управления в процессе лечения сообщает информацию о текущем положении штока 11 относительно корпуса привода 20 и усилии со стороны конечности, которое контролируется с помощью кольцевого датчика осевых усилий 27. Питание микропроцессорной системы управления осуществляется от малогабаритного аккумулятора.
Таким образом, использование предложенного изобретения позволяет повысить надежность и ремонтопригодность конструкции автоматизированного ортопедического аппарата внешней фиксации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРТОПЕДИЧЕСКИЙ АППАРАТ ОСТЕОСИНТЕЗА | 2006 |
|
RU2339332C2 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| Привод наведения рефлектора | 1990 |
|
SU1764109A1 |
| Редуктор-шарнир | 2017 |
|
RU2663030C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672154C1 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЕРЕДАЧИ С ДЛИННЫМИ РЕЗЬБОВЫМИ РОЛИКАМИ | 2004 |
|
RU2297563C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД C ВОЗМОЖНОСТЬЮ СМАЗЫВАНИЯ БЕЗ ДЕМОНТАЖА | 2019 |
|
RU2719493C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЗАТВОР | 2007 |
|
RU2339860C1 |
| СТЕРЖНЕВОЙ КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ (СКДА), УЗЕЛ РЕПОЗИЦИИ ДЛЯ СКДА И СРЕДСТВО ДЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ЧРЕСКОСТНЫХ СТЕРЖНЕЙ СКДА | 1998 |
|
RU2140224C1 |
| УСТРОЙСТВО ДЛЯ РЕПОЗИЦИИ КОСТНЫХ ОТЛОМКОВ | 2002 |
|
RU2230516C2 |

Изобретение относится к медицинской технике. Автоматизированный ортопедический аппарат внешней фиксации содержит электромеханический привод с самотормозящимся планетарным роликовинтовым исполнительным механизмом, шток которого соосно соединен со сменным ходовым цилиндром, два кронштейна для костных резьбовых стержней, один из которых установлен на неподвижном корпусе привода, другой - на ходовом цилиндре, два захвата к кронштейнам, кольцевой датчик осевых усилий, блок управления и питания. Исполнительный механизм размещен в ступенчатой цилиндрической полости штока, связанного с оголовком ходовой гайки исполнительного механизма через первый трехстепенной шарнир и фиксатор поворота ходовой гайки. Опорная гайка исполнительного механизма связана с неподвижным корпусом привода через второй трехстепенной шарнир и фиксатор поворота опорной гайки. Каждый из фиксаторов выполнен в виде пружинного кольца с лапками, закрепленного от осевого перемещения. Каждый захват имеет возможность присоединения и отсоединения от каждого кронштейна с возможностью установки и демонтажа между захватом и кронштейном корпуса электромеханического привода и сменного ходового цилиндра. На боковых поверхностях каждого из кронштейнов выполнены по два выступа, в одном из которых имеется отверстие под съемные шпильки, а в другом - круговой паз под съемные шпильки. Центры отверстий и круговых пазов находятся на окружностях одинакового радиуса, с центрами, расположенными на общей оси корпуса привода и ходового цилиндра. Изобретение обеспечивает повышение надежности и ремонтопригодности конструкции автоматизированного ортопедического аппарата внешней фиксации. 3 ил.
Автоматизированный ортопедический аппарат внешней фиксации, содержащий электромеханический привод с самотормозящимся планетарным роликовинтовым исполнительным механизмом, шток которого соосно соединен со сменным ходовым цилиндром, два кронштейна для костных резьбовых стержней, один из которых установлен на неподвижном корпусе привода, другой - на ходовом цилиндре, два захвата к кронштейнам, кольцевой датчик осевых усилий, блок управления и питания, отличающийся тем, что исполнительный механизм размещен в ступенчатой цилиндрической полости штока, связанного с оголовком ходовой гайки исполнительного механизма через первый трехстепенной шарнир и фиксатор поворота ходовой гайки, опорная гайка исполнительного механизма связана с неподвижным корпусом привода через второй трехстепенной шарнир и фиксатор поворота опорной гайки, каждый из фиксаторов выполнен в виде пружинного кольца с лапками, закрепленного от осевого перемещения, каждый захват имеет возможность присоединения и отсоединения от каждого кронштейна с возможностью установки и демонтажа между захватом и кронштейном корпуса электромеханического привода и сменного ходового цилиндра, на боковых поверхностях каждого из кронштейнов выполнены по два выступа, в одном из которых имеется отверстие под съемные шпильки, а в другом - круговой паз под съемные шпильки, центры отверстий и круговых пазов находятся на окружностях одинакового радиуса, с центрами, расположенными на общей оси корпуса привода и ходового цилиндра.
| 0 |
|
SU165129A1 | |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ ПЛАТОВА | 1991 |
|
RU2061429C1 |
| Конструктивное выполнение узла катод-подогреватель электровакуумных приборов | 1959 |
|
SU125838A1 |
| US 20140257288 A1, 11.09.2014 | |||
| US 20070282338 A1, 06.12.2007 | |||
| US 6217577 B1, 17.04.2001 | |||
| US 20160157892 A1, 09.06.2016. | |||

