Предлагаемое изобретение относится к области медицинской техники, в частности к ортопедическим аппаратам остеосинтеза, и может быть использовано при регенерации костной ткани длинных конечностей при их переломах или необходимости их удлинения.
Известный ортопедический аппарат остеосинтеза (аппарат проф. Илизарова Г.А.) содержит подвижные и неподвижные кольца, связанные стержнями с резьбой и гайками, которые закрепляют кольца на стержнях, поджимая их с двух сторон и обеспечивая возможность относительного смещения колец в продольном направлении и весьма ограниченные угловые смещения колец друг относительно друга [В.И.Шевцов, В.А.Немков, А.В.Скляр. Аппарат Илизарова. Биомеханика. Курган: "Периодика", 1995, 165 с.; А.с. 98471(СССР). Способ сращивания костей при переломах и аппарат для осуществления этого способа / Г.А.Илизаров. - Опубл. в БИ 1954, №6].
Известные ортопедические аппараты остеосинтеза с ручным приводом имеют следующие недостатки.
При ручном аппарате необходимо привлекать медперсонал (медсестер) для того, чтобы вручную четыре-пять раз в сутки подкручивать гайки, увеличивая расстояние между кольцами примерно на 1 мм в сутки, то есть на 200-250 мкм за цикл. Дистракция величиной 200-250 мкм при осевом усилии 1000-1200 Н травмирует кровеносные сосуды и нервные ткани, увеличивает время заживления травм и сроки лечении. Ручной привод повышает трудоемкость обслуживания и создает необходимость содержания соответствующего персонала. Кроме того, ручная технология лечения рассчитана на клиническое лечение и не совместима с амбулаторным лечением.
Анализ изобретений аппаратов с приводами (А.c. 1732956 СССР, МКИ А61В 17/60. Компрессионно-дистракционный аппарат / Г.А.Илизаров, Ф.Я.Руц, В.А.Немков, Э.В.Бурлаков (СССР), А.c. 1750666 СССР, МКИ А61В 17/58. Компрессионно-дистракционный аппарат / Г.А.Илизаров, А.Е.Филимонов, А.А.Курилкин, Э.М.Елагин, Э.В.Бурлаков (СССР), А.c. 1792671 СССР, МКИ А61В 17/58. Компрессионно-дистракционный аппарат / Г.А.Илизаров, Э.В.Бурлаков, Ф.Я.Руц, В.А.Немков (СССР)) показывает, что авторы предлагают лишь разные варианты синхронизации движения соединительных резьбовых стержней, не решая задачи обеспечения оптимального цикла дистракции при автоматизации процесса лечения.
Наиболее близким аналогом является аппарат по патенту РФ №2053724 (1996 г.), принятый в качестве прототипа. Недостатками аппарата по патенту РФ №2053724 являются следующие.
Во-первых, как показали медицинские исследования, оптимальная величина дистракции за один цикл, соответствующая естественному процессу регенерации костной ткани, составляет 20-30 мкм, а число циклов в сутки около 40. Однако применение в приводе рассматриваемого аппарата передач винт-гайка скольжения не позволяет получить малые стабильные перемещения выходного звена привода, то есть обеспечить высокую разрешающую способность, чувствительность привода. К тому же применение в рассматриваемом аппарате приводов с длинными кинематическими цепями, смонтированными на резьбовых стержнях, повышает габариты, вес приводов и снижает надежность приводов.
Во-вторых, в процессе лечения необходимо обеспечить не только циклические продольные смещения подвижных и неподвижных колец, но и во многих случаях существенные циклические изменения углового положения плоскостей колец относительно друг друга, что трудно осуществить в прототипе при креплении колец на стержнях гайками, навинченными на стержень.
В-третьих, для анализа процесса дистракции и выбора режима качественного лечения лечащему врачу необходимо знать не только величины микроперемещений, но и изменения величин усилий, возникающих в различных стержнях в процессе дистракции. В рассматриваемом аппарате нет подсистемы измерения микроперемещений и усилий в стержнях и нет подсистемы безопасности.
В-четвертых, в рассматриваемом аппарате отсутствует система управления, хранящая в памяти заданную врачом программу лечения, управляющая работой всех подсистем аппарата и обеспечивающая возможность амбулаторного лечения.
Задача изобретения - повышение качества и сокращение сроков лечения, автоматизация процесса лечения с возможностью амбулаторного лечения, регистрация величин микроперемещений и соответствующих величин осевых усилий в приводах при обеспечении заданной надежности, массы и габаритов приводов.
Это достигается тем, что ортопедический аппарат остеосинтеза, содержащий подвижное и неподвижное кольца, автономное электропитание аппарата, имеет микроЭВМ управления работой аппарата, основной и два других привода линейного перемещения, автономное электропитание аппарата выполнено в виде малогабаритного аккумулятора, основной и два других привода линейного перемещения состоят из микропроцессорной системы управления и питания приводов, подсистемы аварийного отключения упомянутых приводов пациентом в виде двух кнопок, корпуса, штока, шагового микроэлектродвигателя, из микропроцессорной подсистемы регистрации осевых усилий приводов с использованием датчиков усилий на штоках, промежуточного планетарного зубчатого редуктора типа 2k-h, солнечная шестерня которого закреплена на валу шагового микроэлектродвигателя, самотормозящей передачи винт-гайка с резьбовыми роликами по пункту 2 настоящей формулы, на входном конце винта которой закреплено водило редуктора, при этом ходовая гайка выполнена совместно со штоком, корпус основного привода жестко заделан в неподвижном кольце с помощью трехстепенного шарнира с регулируемыми фиксаторами его углового положения относительно неподвижного кольца аппарата, а шток основного привода соединен с помощью трехстепенного шарнира с перемычкой, в которой с одной стороны жестко заделаны три штосселя в соответствующих направляющих, а с другой стороны жестко заделаны три резьбовых стержня, причем направляющие соединены с корпусом основного привода трехстепенным шарниром, а три резьбовых стержня через вторую перемычку соединены с помощью двухстепенного шарнира с подвижным кольцом аппарата, при этом корпуса двух других приводов связаны трехстепенным шарниром с неподвижным кольцом аппарата, а штоки двух других приводов через резьбовой стержень связаны трехстепенным шарниром с подвижным кольцом аппарата, во всех трех приводах штоки закреплены от вращения относительно своих корпусов.
Весогабаритные, энергетические, точностные и стоимостные характеристики аппарата в значительной мере определяются характеристиками передачи винт-гайка с резьбовыми роликами.
Известна планетарная передача винт-гайка с длинными резьбовыми роликами, содержащая винт, ролики с резьбой одной заходности на всей длине ролика, ходовую и опорную гайки [В.В.Козырев. Роликовинтовые передачи - перспективные наукоемкие компоненты общемашиностроительного применения // Приводная техника. 1997, №5, с.28-30; В.В.Козырев. Прецизионные роликовинтовые передачи как исполнительные механизмы электромеханических приводов с микропроцессорной системой управления: достижения научной школы ВлГУ. //Мехатроника, автоматизация, управление. №10, 2003, с.21-22; Авторское свидетельство СССР №739289, кл. F16Н 1/34, 1976 (прототип)].
Однако условия сборки, то есть необходимость одновременного размещения длинных резьбовых роликов в ходовой и опорной гайках, накладывают ограничения на параметры передачи.
Поэтому при роликах с одинаковой резьбой на всей их длине величина перемещения гайки за оборот винта S≥(1...0,5)Р (где Р - шаг резьбы), то есть ограничивается возможность повышения редукции, передаточного отношения. Вместе с тем в приводах с высокой разрешающей способностью (высокой чувствительностью), в частности в приводах ортопедического аппарата остеосинтеза, необходимость повышения передаточного отношения обеспечивается за счет установки промежуточного многоступенчатого редуктора (зубчатого или червячного), что приводит согласно принципу кратчайшей размерной или кинематической цепи к снижению кинематической точности и плавности работы привода, снижению его надежности, повышению веса, габаритов и стоимости.
Наиболее близким аналогом к предлагаемому изобретению является планетарная передача винт - гайка с длинными резьбовыми роликами [А.с. СССР №739289, кл. F16Н 1/34, 1976 (прототип)]. Такая конструкция обеспечивает передаточное отношение при S≥0,5P и максимальное число роликов nр≤4 по условию сборки.
Недостатком этой известной передачи является ограниченная редукция при S≥0,5P (обычно S=P), что не всегда позволяет обойтись без многоступенчатого промежуточного редуктора, а многоступенчатый промежуточный редуктор повышает вес и габариты, снижает КПД, удлиняет кинематическую цепь и снижает кинематическую точность привода.
Задачей изобретения является также повышение разрешающей способности, чувствительности привода при обеспечении его малых габаритов и массы.
Эта задача изобретения достигается тем, что у входящей в состав привода аппарата передачи винт-гайка с резьбовыми роликами, состоящей из винта, резьбовых роликов, ходовой и опорной гаек, винт выполнен с зубчатыми венцами, резьбовым ходовым участком и с опорным участком, имеющим двухступенчатую цилиндрическую поверхность, причем одна ступень этой поверхности имеет диаметр, не превышающий внутренний диаметр резьбового ходового участка винта, а другая ступень имеет диаметр, равный среднему диаметру резьбы ходового участка винта, резьбовые ролики выполнены с ходовым участком, имеющим резьбу, с опорным резьбовым участком, с зубчатыми венцами на концах и с цилиндрической поверхностью, диаметр которой равен среднему диаметру резьбы ходового участка ролика, упомянутая одна ступень расположена напротив опорного резьбового участка резьбового ролика, а упомянутая другая ступень сопрягается с упомянутой цилиндрической поверхностью резьбового ролика, резьба опорного участка i-того ролика смещена в осевом направлении относительно резьбы на его ходовом участке на величину
ΔPi=P(z30-z3)(i-1)/np,
где Р - шаг резьбы, z30 и z3 - соответственно числа заходов резьбы на опорной и ходовой гайках, nр - число роликов, i=1, 2, ..., nр,
при этом угол подъема резьбы на ходовых участках роликов выполнен равным по величине и противоположным по направлению углу подъема резьбы на ходовом участке винта, а угол подъема резьбы на опорной гайке выполнен равным по величине и направлению углу подъема резьбы опорного участка ролика, опорная гайка выполнена с зубчатыми венцами, зубчатые венцы резьбовых роликов входят в зацепление с зубчатыми венцами винта и зубчатым венцом опорной гайки, ходовая гайка закреплена от вращения.
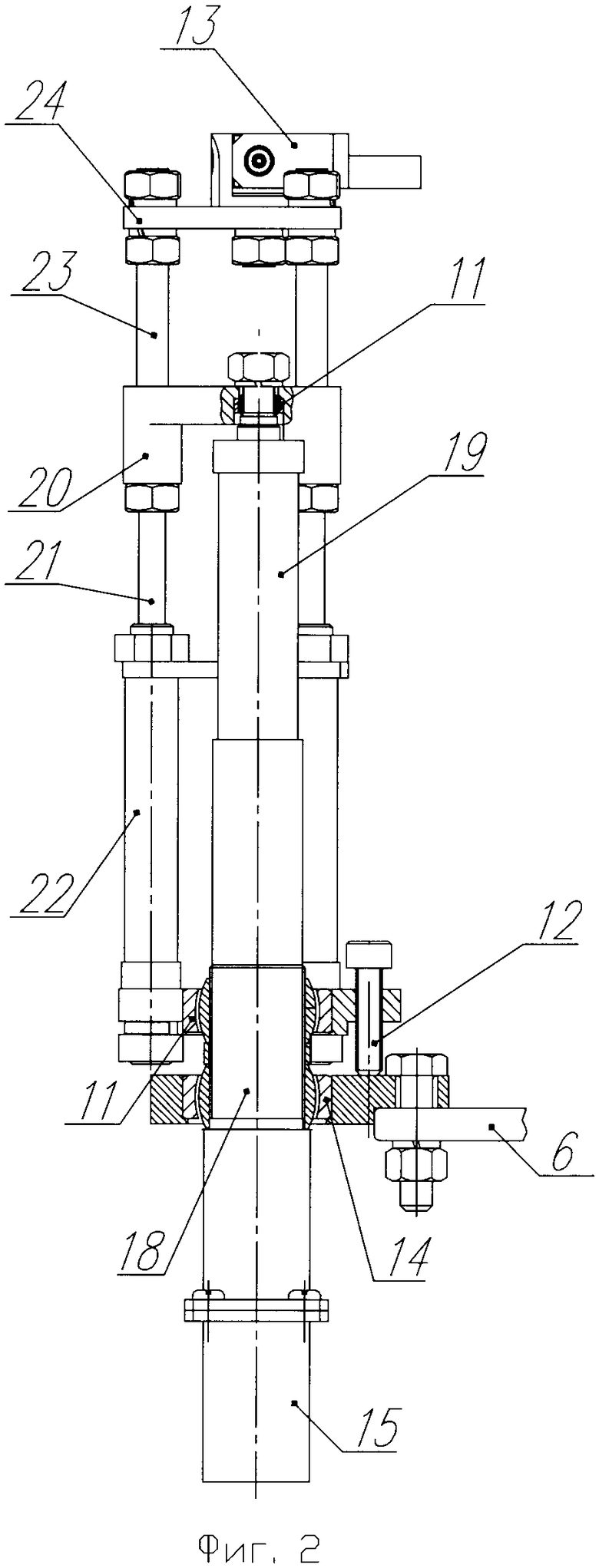
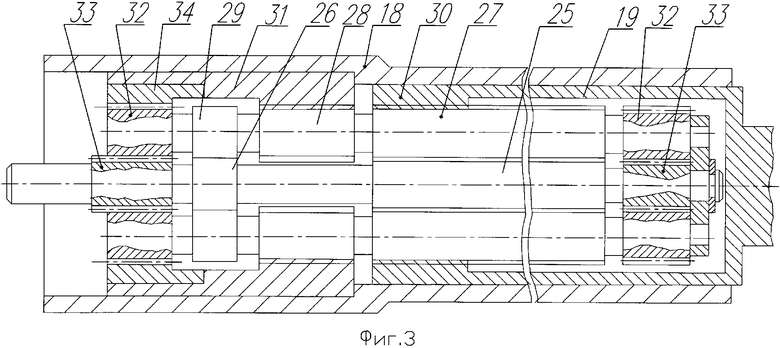
Конструкция аппарата изображена на фиг.1, 2, 3. На фиг.1 показана структурная схема автономного ортопедического аппарата автоматизированного остеосинтеза. На фиг.2 показан основной привод линейного перемещения. На фиг.3 показана передача винт-гайка с резьбовыми роликами.
В структурную схему (фиг.1) входят: однокристальная микроЭВМ 1, шина данных (два канала) 2, шина управления 3, контроллер управления шагового микроэлектродвигателя 4, спицы 5, нижнее кольцо (неподвижное) 6, верхнее кольцо (подвижное) 7, основной стержень 8, стержни 9 и 10, трехстепенной шарнир 11 с фиксаторами 12 его углового положения относительно неподвижного кольца, двухстепенной шарнир 13, трехстепенные шарниры 14, шаговые микроэлектродвигатели 15, промежуточный редуктор 16, передача винт-гайка 17.
Шарнирно-стержневая система аппарата совместно с приводами обеспечивает не только циклические продольные смещения подвижных и неподвижных колец, но и существенные циклические изменения углового положения плоскостей колец относительно друг друга.
Корпус 18 основного привода (фиг.2) жестко заделан в неподвижном кольце 6 аппарата с помощью трехстепенного шарнира 11 с тремя регулируемыми фиксаторами-болтами 12 его углового положения относительно неподвижного кольца аппарата. Фиксаторы-болты расположены радиально вокруг корпуса.
Для установки необходимого углового положения основного привода относительно неподвижного кольца 6 необходимо сначала вывинтить болты-фиксаторы 12 в начальное положение, затем установить основной привод в необходимое угловое положение относительно неподвижного кольца, а после этого ввинтить болты-фиксаторы до упора в жестко связанный с неподвижным кольцом кронштейн шарнира 14.
Шток 19 привода соединен с перемычкой 20 с помощью трехстепенного шарнира 11. В перемычку 20 с одной стороны жестко заделаны два-три штосселя 21 в соответствующих направляющих 22, а с другой стороны жестко заделаны три резьбовых стержня 23, которые через перемычку 24 и двухстепенной шарнир 13 соединены с подвижным кольцом аппарата. Направляющие 22 соединены с корпусом привода 18 с помощью трехстепенного шарнира 11. Два трехстепенных шарнира 11 с обоих концов привода обеспечивают самоустановку привода и осевое направление нагрузки на привод.
Корпуса двух других приводов связаны трехстепенным шарниром с неподвижным кольцом аппарата, а их штоки связаны трехстепенным шарниром с подвижным кольцом аппарата. Во всех трех приводах штоки закреплены от вращения относительно своих корпусов.
Исполнительный модуль состоит из промежуточного планетарного зубчатого редуктора типа 2К-Н и планетарной передачи винт-гайка с резьбовыми роликами (Фиг.3).
В передаче с резьбовыми роликами перемещение ходовой гайки за оборот винта

где Р - шаг резьбы; k=d1/d2; d1, d2 - средние диаметры резьб винта и ролика; z2, z3 - числа заходов резьб на ходовом участке ролика и ходовой гайке.
Высокую редукцию передачи можно получить при минимальном, но отличном от нуля, значении величины в квадратных скобках выражения (1), то есть при
z3=z2(k+2)+1, или
z3=z2(k+2)-1.
С учетом того, что число заходов резьб на опорной гайке
z30=z2(k+2),
условие высокой редукции

или

Однако ограничением при получении высокой редукции является условие сборки, то есть условие размещения роликов одновременно в ходовой и опорной гайках;


при nр=nро,
где z1 - число заходов резьб (с учетом знака); Е, Е0 - целые числа; nр - число роликов.
Если принять число заходов резьб на ходовом участке винта z1=-1, то максимальное число роликов в ходовой гайке (4) nр=(z3+1)/Е или при Е=1 nр=z3+1.
С учетом выражений (2) и (3) nр=z30 или nр=z30+2.
Снять ограничение на повышение редукции по условию размещения роликов в опорной гайке (5) можно тем, что опорный участок винта выполнить цилиндрическим с диаметром цилиндрической поверхности, не превышающим внутренний диаметр резьбы ходового участка винта, а резьбу каждого опорного участка i-того длинного ролика сместить в осевом направлении относительно резьбы на его ходовом участке на величину
ΔP1=P(z30-z3)(i-1), i=1, 2,... np.
Минимальное перемещение ходовой гайки за оборот винта
Например, при k=1, z30=3, z3=2, nр=3
получаем ΔР1=0; ΔP2=Р/3; ΔР3=2P/3; S=Р/4.
Предлагаемая планетарная передача винт-гайка с резьбовыми роликами (фиг.3) 2 состоит из винта с ходовым участком резьбы 25 и опорным катком 26, длинных резьбовых роликов с ходовым участком резьбы 27, опорным участком резьбы 28 и катком 29, ходовой гайки 30, опорной гайки 31. Резьбы на опорных участках роликов сдвинуты в осевом направлении относительно резьб на ходовых участках роликов. Катки, выполненные на опорных участках роликов, сопряжены с катком, выполненным на опорном участке винта, и имеют резьбу, являющуюся продолжением резьбы опорного участка ролика и необходимую для навинчивания опорной гайки при сборке передачи. Ходовая гайка выполнена совместно со штоком 19, а опорная гайка установлена в корпусе 18 привода, являющемся направляющей для штока 19. Для предотвращения выкатывания роликов с винта и опорных гаек угол подъема резьбы на ходовых участках роликов выполнен равным по величине и противоположным по направлению углу подъема резьбы на ходовом участке винта, а угол подъема резьбы на опорной гайке выполнен равным по величине и направлению углу подъема резьбы опорного участка ролика. Для предотвращения проскальзывания сопряженных резьб на концах длинных резьбовых роликов устроены зубчатые венцы 32, входящие в зацепление с зубчатыми венцами винта 33 и зубчатым венцом 34 опорной гайки. Опорная гайка исполняет роль радиально-упорного подшипника. Рабочее усилие с ходовой гайки на опорную гайку передается не только через винт, как в традиционных передачах (шариковинтовых, роликовинтовых), но и через блок длинных резьбовых роликов.
При вращении винта 25 резьбовые ролики 27 совершают планетарное движение и обкатываются по резьбам ходового участка винта 25, по каткам 26 винта, по резьбам ходовой 30 и опорной 31 гаек, а ходовая гайка, закрепленная от вращения, получает осевое перемещение относительно опорной гайки.
Программное управление работой всего аппарата осуществляется микроЭВМ 1, а управление движением шаговых микроэлектродвигателей осуществляется микроконтроллером 4. С пульта управления величина перемещения задается в микрометрах, которые пересчитываются в соответствующее число импульсов на входе микроэлектродвигателя. Данные о задаваемых величинах микроперемещений, скорости движения, направлении перемещения для каждого микроэлектродвигателя, периоде цикла задаются с пульта управления и хранятся во внутренней памяти микроЭВМ.
Программное индивидуальное управление шаговыми микроэлектродвигателями осуществляется микропроцессорной системой управления и питания приводов на базе высокоинтегральных микропроцессорных схем и обеспечивает заданные врачом величину дистракции и период цикла, получение различных продольных и угловых смещений подвижного кольца относительно неподвижного кольца.
Программное управление обеспечивает автоматизацию процесса лечения, а также возможность оперативно задавать и корректировать программы, чтобы они в наибольшей степени отвечали требованиям качественного лечения.
Программное управление обеспечивает возможность аварийного выключения приводов пациентом. Для этого с двух сторон корпуса блока питания установлены кнопки аварийного отключения приводов. При одновременном нажатии двух кнопок срабатывает подсистема аварийного отключения приводов. Это обеспечивает безопасность пациента.
Регистрация микроперемещений штоков осуществляется или с помощью датчиков угла поворота микроэлектродвигателя и пересчета этого угла поворота в линейные перемещения штока, или непосредственно с помощью датчиков линейного перемещения штока.
Регистрация осевых усилий на штоках осуществляется с помощью тензометрических датчиков на штоке и микропроцессорной подсистемы регистрации осевых усилий приводов.
Регистрация микроперемещений штоков и осевых усилий приводов дает лечащему врачу оперативную и объективную информацию о процессе лечения, что позволяет повысить качество и сократить сроки лечения.
Программное управление и автономное питание от аккумулятора обеспечивают возможность использования разработанного аппарата для амбулаторного лечения, что сокращает трудоемкость и стоимость лечения.
Жесткая заделка корпуса основного привода в неподвижном кольце с помощью трехстепенного шарнира с регулируемыми фиксаторами его углового положения относительно неподвижного кольца аппарата позволяет фиксировать любое требуемое угловое положение корпуса основного привода относительно неподвижного кольца при установке аппарата на пациенте или в процессе лечения, что расширяет функциональные возможности аппарата при лечении сложных переломов и сокращает время установки аппарата.
Предлагаемая передача винт-гайка с резьбовыми роликами в отличие от известных передач винт-гайка качения (шариковинтовых, роликовинтовых) обеспечивает высокую редукцию при постоянном передаточном отношении и относительно высоком КПД. В рассматриваемом приводе перемещение гайки за оборот винта составляет S=0,25Р, где Р - шаг резьбы.
Выполнение винта с опорным участком, имеющим двухступенчатую цилиндрическую поверхность, одна ступень которой имеет диаметр, не превышающий внутренний диаметр резьбового ходового участка винта, а другая ступень имеет диаметр, равный среднему диаметру резьбы ходового участка винта, и выпонение резьбовых роликов с опорным резьбовым участком и с цилиндрической поверхностью, диаметр которой равен среднему диаметру резьбы ходового участка ролика, при расположении упомянутой одной ступени напротив опорного резьбового участка резьбового ролика, и при сопряжении упомянутой другой ступени с упомянутой цилиндрической поверхностью резьбового ролика, осуществляется передача радиальных нагрузок от опорных участков роликов на опорные участки винта через сопряжение цилиндрических поверхностей. Этим обеспечивается относительно высокая грузоподъемность, долговечность и жесткость передачи.
Эти преимущества позволяют разрабатывать на базе предлагаемой передачи малогабаритные приводы с высокой разрешающей способностью, чувствительностью и со скоростью, соответствующей скорости естественной регенерации костной ткани, при высоком осевом усилии. При этом на каждом шаге двигателя передача обеспечивает высокую плавность перемещения.
Промежуточный планетарный редуктор типа 2К-Н занимает по габаритам место муфты, которая могла бы соединить двигатель и передачу, но в отличие от муфты редуктор не только соединяет двигатель с передачей, но и обеспечивает дополнительную редукцию.
За один цикл дистракции время работы электродвигателя составляет примерно 5...7 с, а время остановки электродвигателя примерно 40 мин. Чтобы не оставлять двигатель включенным для фиксации относительного положения колец во время остановки, целесообразно применять самотормозящую передачу винт-гайка с резьбовыми роликами для фиксации относительного положения колец. Применение самотормозящей передачи существенно экономит энергию, увеличивает сроки подзарядки аккумуляторов, что особенно важно при амбулаторном лечении.
Применение шагового микроэлектродвигателя с восемью шагами за оборот микродвигателя в сочетании с промежуточным планетарным редуктором типа 2к-h с передаточным отношением uред=4 и планетарной передачей с длинными резьбовыми роликами с перемещением ходовой гайки 100 мкм за оборот винта обеспечивает величину перемещения ходовой гайки 25 мкм за оборот микроэлектродвигателя или 3,125 мкм за шаг микроэлектродвигателя. Разработанный электропривод позволяет реализовать оптимальную величину дистракции за цикл и обеспечивает регулировку этой величины, что способствует повышению качества и сокращению сроков лечения.
Надежные унифицированные шаговые микроэлектродвигатели, надежные передачи винт-гайка с резьбовыми роликами, отличающиеся высокой редукцией и высокой долговечностью, унифицированная высокоинтегрированная микропроцессорная система управления и питания микроэлектродвигателей, унифицированный малогабаритный аккумулятор обеспечивают высокую надежность, заданную массу и габариты автономного ортопедического аппарата автоматизированного остеосинтеза.
Таким образом, создан ортопедический аппарат остеосинтеза, обеспечивающий повышение качества и сокращение сроков лечения, автоматизацию процесса лечения с возможностью амбулаторного лечения, регистрацию величин микроперемещений и соответствующих величин осевых усилий в приводах при обеспечении заданной надежности, массы и габаритов приводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВИНТ - ГАЙКА С ДЛИННЫМИ РЕЗЬБОВЫМИ РОЛИКАМИ | 2004 |
|
RU2292502C2 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЕРЕДАЧИ С ДЛИННЫМИ РЕЗЬБОВЫМИ РОЛИКАМИ | 2004 |
|
RU2297563C2 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВИНТ-ГАЙКА С ДЛИННЫМИ РЕЗЬБОВЫМИ РОЛИКАМИ | 2006 |
|
RU2341707C2 |
| Автоматизированный ортопедический аппарат внешней фиксации | 2017 |
|
RU2657937C1 |
| МЕХАТРОННЫЙ МОДУЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2007 |
|
RU2351817C1 |
| Червячно-реечная передача | 1987 |
|
SU1768839A1 |
| Планетарная передача винт-гайка качения | 1978 |
|
SU968542A1 |
| Планетарная винтовая передача качения | 1976 |
|
SU739289A1 |
| Планетарная передача винт-гайка качения | 1990 |
|
SU1796810A1 |
| Планетарная передача винт-гайка качения | 1979 |
|
SU916828A1 |
Группа изобретений относится к медицине, а именно к травматологии и ортопедии. При использовании аппарата обеспечивается повышение качества и сокращение сроков лечения, автоматизация процесса лечения с возможностью амбулаторного лечения, регистрация величин микроперемещений и соответствующих величин осевых усилий в приводах при заданной надежности, массы и габаритов приводов. При использовании передачи винт-гайка, входящей в аппарат, обеспечивается повышение разрешающей способности, чувствительности привода при обеспечении его малых габаритов и массы. Аппарат содержит подвижное и неподвижное кольца, автономное электропитание аппарата, микроЭВМ управления работой аппарата, основной и два других привода линейного перемещения. Автономное электропитание аппарата выполнено в виде малогабаритного аккумулятора. Основной и два других привода линейного перемещения состоят из микропроцессорной системы управления и питания приводов, подсистемы аварийного отключения упомянутых приводов пациентом в виде двух кнопок, корпуса, штока, шагового микроэлектродвигателя, из микропроцессорной подсистемы регистрации осевых усилий приводов с использованием датчиков усилий на штоках, промежуточного планетарного зубчатого редуктора типа 2k-h. Солнечная шестерня упомянутого редуктора закреплена на валу шагового микроэлектродвигателя, описанной ниже, самотормозящей передачи винт-гайка с резьбовыми роликами, на входном конце винта которой закреплено водило редуктора. Ходовая гайка выполнена совместно со штоком. Корпус основного привода жестко заделан в неподвижном кольце с помощью трехстепенного шарнира с регулируемыми фиксаторами его углового положения относительно неподвижного кольца аппарата. Шток основного привода соединен с помощью трехстепенного шарнира с перемычкой, в которой с одной стороны жестко заделаны три штосселя в соответствующих направляющих, а с другой стороны жестко заделаны три резьбовых стержня. Направляющие соединены с корпусом основного привода трехстепенным шарниром. Три резьбовых стержня через вторую перемычку соединены с помощью двухстепенного шарнира с подвижным кольцом аппарата. Корпуса двух других приводов связаны трехстепенным шарниром с неподвижным кольцом аппарата. Штоки двух других приводов через резьбовой стержень связаны трехстепенным шарниром с подвижным кольцом аппарата. Во всех трех приводах штоки закреплены от вращения относительно своих корпусов. Передача винт-гайка с резьбовыми роликами состоит из винта, резьбовых роликов, ходовой и опорной гаек. Винт выполнен с зубчатыми венцами, резьбовым ходовым участком и с опорным участком, имеющим двухступенчатую цилиндрическую поверхность. Одна ступень двухступенчатой цилиндрической поверхности имеет диаметр, не превышающий внутренний диаметр резьбового ходового участка винта, а другая ступень имеет диаметр, равный среднему диаметру резьбы ходового участка винта. Резьбовые ролики выполнены с ходовым участком, имеющим резьбу, с опорным резьбовым участком, с зубчатыми венцами на концах и с цилиндрической поверхностью, диаметр которой равен среднему диаметру резьбы ходового участка ролика. Упомянутая одна ступень расположена напротив опорного резьбового участка резьбового ролика, а упомянутая другая ступень сопрягается с упомянутой цилиндрической поверхностью резьбового ролика. Резьба опорного участка i-того ролика смещена в осевом направлении относительно резьбы на его ходовом участке на величину ΔP1=P(z30-z3)(i-1)/np, где Р - шаг резьбы, z30 и z3 - соответственно числа заходов резьбы на опорной и ходовой гайках, nр - число роликов, i=1,2,...,np. Угол подъема резьбы на ходовых участках роликов выполнен равным по величине и противоположным по направлению углу подъема резьбы на ходовом участке винта. Угол подъема резьбы на опорной гайке выполнен равным по величине и направлению углу подъема резьбы опорного участка ролика. Опорная гайка выполнена с зубчатыми венцами. Зубчатые венцы резьбовых роликов входят в зацепление с зубчатыми венцами винта и зубчатым венцом опорной гайки. Ходовая гайка закреплена от вращения. 2 н.п. ф-лы, 3 ил.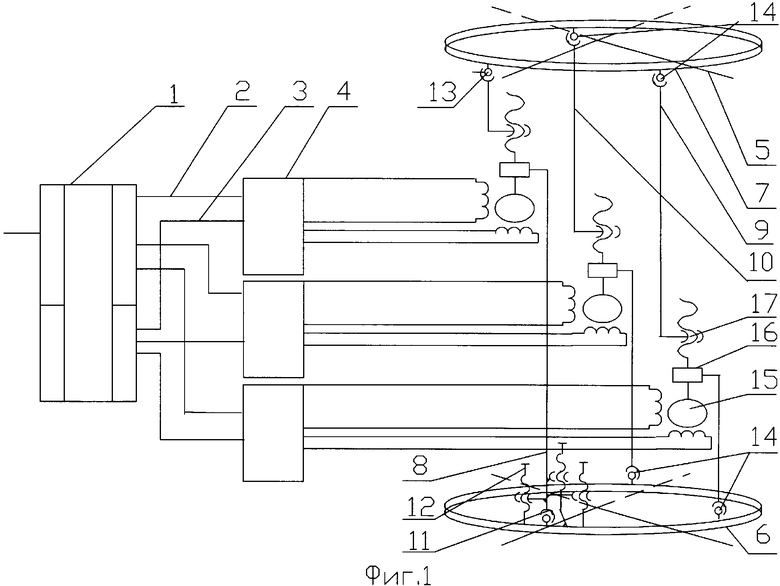
ΔP1=P(z30-z3)(i-1)/np,
где Р - шаг резьбы, z30 и z3 - соответственно числа заходов резьбы на опорной и ходовой гайках, nр - число роликов, i=1,2,...,np, при этом угол подъема резьбы на ходовых участках роликов выполнен равным по величине и противоположным по направлению углу подъема резьбы на ходовом участке винта, а угол подъема резьбы на опорной гайке выполнен равным по величине и направлению углу подъема резьбы опорного участка ролика, опорная гайка выполнена с зубчатыми венцами, зубчатые венцы резьбовых роликов входят в зацепление с зубчатыми венцами винта и зубчатым венцом опорной гайки, ходовая гайка закреплена от вращения.
| RU 2053724 C1, 10.02.1996 | |||
| Планетарная винтовая передача качения | 1976 |
|
SU739289A1 |
| Устройство для опрокидывания и разгрузки подъемных сосудов | 1952 |
|
SU98475A1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ ПЛАТОВА | 1991 |
|
RU2061429C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ ВАЛА | 1987 |
|
RU2039989C1 |
| US 5601551 A, 11.02.1997 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| GB 1351258 A, 24.04.1974 | |||
| ГОЛЯХОВСКИИ В | |||
| и др | |||
| "Руководство по чрескостному остеосинтезу методом Илизарова" | |||
| - М.: "БИНОМ" и др., 1999. | |||

