ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к высокоинтенсивному сфокусированному ультразвуку, в частности, к применению емкостных микромеханических ультразвуковых преобразователей для высокоинтенсивного сфокусированного ультразвука.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Абляцию предстательной железы высокоинтенсивным сфокусированным ультразвуком (HIFU) обычно производили через ректальную стенку трансректальным зондом. В качестве альтернативы, абляцию можно также производить через стенку уретры с использованием трансуретрального зонда. Трансуретральный доступ обладает несколькими преимуществами, имеющими отношение к безопасности, в сравнении с трансректальным подходом. Так как местоположение уретры известно (зонд внутри уретры), то легче избежать ненамеренного термического повреждения уретры, которое может повысить риск недержания мочи. Кроме того, так как ультразвуковое воздействие выполняется не через ректальную стенку, то риск повреждения данной уязвимой структуры также значительно снижается. Основной недостаток трансуретрального доступа состоит в том, что пространство, доступное для преобразователя, становится существенно меньше в сравнении с трансректальным доступом. Это, по существу, ограничивает конструкцию катетерного преобразователя до одномерных фазированных решеток, при использовании обычных пьезоэлектрических или пьезокомпозитных преобразователей. Это может ограничивать также возможные способы ультразвукового воздействия, которые можно применить. По практическим причинам, на традиционных преобразователях образованы выступы относительно небольшим числом крупных элементов, расположенных в ряд, т.е. линейной (одномерной) решеткой.
Международная заявка WO 02/32506 раскрывает внутритканевый преобразователь для термотерапии HIFU.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает медицинский инструмент, компьютерный программный продукт и способ управления медицинским инструментом в независимых пунктах формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
«Емкостной микромеханический ультразвуковой преобразователь» (CMUT) в контексте настоящего изобретения включает в себя целиком емкостной ультразвуковой преобразователь, который изготовлен с использованием технологий микромеханической обработки. Технологии микромеханической обработки являются методами изготовления тонкопленочных элементов; обычно, упомянутые методы выполняют с использованием технологических процессов, идентичных или сходных с технологическими процессами, используемыми для изготовления интегральных схем. Преобразователи CMUR (на емкостных микромеханических ультразвуковых резонаторах) известны к настоящему времени из международной заявки WO 2009/082740.
Магнитно-резонансные (МР) данные определяются в настоящей заявке как записанные результаты измерений радиочастотных сигналов, испускаемых атомными спинами, посредством антенны магнитно-резонансного устройства в процессе сканирования для магнитно-резонансной визуализации. Изображение, полученное методом магнитно-резонансной визуализации, (МРВ изображение) определяется в настоящей заявке как реконструированное двух- или трехмерное визуальное представление анатомических данных, содержащихся в данных магнитно-резонансной визуализации. Упомянутое визуальное представление можно создавать с использованием компьютера.
Тепловые магнитно-резонансные данные определяются в настоящей заявке как записанные результаты измерений радиочастотных сигналов, испускаемых атомными спинами, посредством антенны магнитно-резонансного устройства в процессе сканирования для магнитно-резонансной визуализации, которые содержат информацию, которые могут применяться для магнитно-резонансной термометрии. Магнитно-резонансная термометрия выполняет функцию измерения изменений температурно-чувствительных параметров. Примерами параметров, которые можно измерять в процессе магнитно-резонансной термометрии, являются: сдвиг резонансной частоты протона, коэффициент диффузии или изменения времени T1 и/или T2 релаксации, которые можно использовать для измерения температуры с помощью магнитного резонанса. Сдвиг резонансной частоты протона зависит от температуры потому, что магнитное поле, воздействию которого подвергаются отдельные протоны, атомы водорода, зависит от окружающей молекулярной структуры. Повышение температуры ослабляет молекулярное экранирование из-за воздействия температуры на водородные связи. Это приводит к температурной зависимости резонансной частоты протонов. По тепловым магнитно-резонансным данным можно реконструировать тепловую карту, температурную карту или термографическое магнитно-резонансное изображение.
Протонная плотность линейно зависит от равновесной намагниченности. Поэтому изменения температуры можно определять с использованием изображений, взвешенных по протонной плотности.
Времена релаксации T1, T2 и T2 со звездочкой (иногда записываемое как T2*) также зависят от температуры. Поэтому реконструкцию изображений, взвешенных по T1, T2 и T2*, можно использовать для построения тепловых или температурных карт.
Температура влияет также на броуновское движение молекул в водном растворе. Поэтому, для измерения температуры можно применять импульсные последовательности, которые способны измерять коэффициенты диффузии, например, последовательность спин-эхо с импульсным диффузионным градиентом.
Один из наиболее полезных способов измерения температуры с использованием магнитного резонанса состоит в измерении сдвига резонансной частоты протонов (PRF) для протонов воды. Резонансная частота протонов зависит от температуры. Когда температура в вокселе изменяется, сдвиг частоты будет вызывать изменение измеренной фазы протонов воды. Поэтому можно определять изменение температуры между двумя фазовыми изображениями. Данный способ определения температуры имеет преимущество в том, что он является относительно быстрым по сравнению с другими способами. Способ PRF рассматривается в настоящей заявке подробнее, чем другие способы. Однако, способы и методы, рассматриваемые в настоящей заявке, применимы также к другим способам выполнения термометрии посредством магнитно-резонансной визуализации.
«Машиночитаемый носитель данных» в контексте настоящей заявки включает в себя любой материальный носитель данных, который может хранить команды, которые могут выполняться процессором компьютерного устройства. Машиночитаемый носитель данных может называться машиночитаемым невременным носителем данных. Машиночитаемый носитель данных может также называться материальным машиночитаемым носителем данных. В некоторых вариантах осуществления, машиночитаемый носитель данных может быть также способен хранить данные, которые могут вызываться процессором компьютерного устройства. Примеры машиночитаемого носителя данных включают в себя, но без ограничения: гибкий диск, накопитель на жестких магнитных дисках, твердотельный жесткий диск, флэш-память, USB-флэш-накопитель, память с произвольной выборкой (RAM), постоянную память (ROM), оптический диск, магнито-оптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и универсальные цифровые диски (DVD), например CD-ROM (память ROM на компакт-диске), CD-RW (перезаписываемый компакт-диск), CD-R (однократно записываемый компакт-диск), DVD-ROM (память ROM на DVD-диске), DVD-RW (перезаписываемый DVD-диск) или DVD-R (однократно записываемые DVD-диски). Термин машиночитаемый носитель данных относится также к различным типам носителей для записи, допускающим выборку компьютерным устройством по сети или каналу связи. Например, поиск и выборка данных может осуществляться через модем, по сети Интернет или по локальной сети.
«Компьютерная память» или «память» является примером машиночитаемого носителя данных. Компьютерная память является любой памятью, которая непосредственно доступна процессору. Примеры компьютерной памяти включают в себя, но без ограничения: память RAM, регистры и регистровые файлы.
«Компьютерное запоминающее устройство» или «запоминающее устройство» является примером машиночитаемого носителя данных. Компьютерное запоминающее устройство является любым энергонезависимым машиночитаемым носителем данных. Примеры компьютерного запоминающего устройства включают в себя, но без ограничения: накопитель на жестких дисках, USB-флэш-накопитель, накопитель на гибких дисках, микропроцессорную карту, DVD-диск, диск CD-ROM и накопитель на твердотельных дисках. В некоторых вариантах осуществления, компьютерное запоминающее устройство может быть также компьютерной памятью или наоборот.
«Компьютер» в контексте настоящей заявки включает в себя устройство, содержащее процессор. Процессор является электронным компонентом, который может выполнять программу или машинно-выполняемую команду. Ссылки на компьютерное устройство, содержащее «процессор», следует интерпретировать как, возможно, содержащее более, чем один процессор. Термин компьютерное устройство следует также интерпретировать как, возможно, относящийся к множеству или сети компьютерных устройств, содержащих, каждое, процессор. Многие программы содержат свои команды, выполняемые несколькими процессорами, которые могут находиться в одном и том же компьютерном устройстве, или которые могут быть даже распределены по нескольким компьютерным устройствам.
«Пользовательский интерфейс» в контексте настоящей заявки является интерфейсом, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. Пользовательский интерфейс может обеспечивать информацию или данные для оператора и/или принимать информацию или данные от оператора. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером обеспечения информации для оператора. Прием данных через посредство клавиатуры, мыши, трекбола, сенсорной панели, ручки координатно-указательного устройства, графического планшета, джойстика, игрового планшета, веб-камеры, гарнитуры, манипуляторов, рулей, педалей, проводной перчатки, танцевального коврика, пульта дистанционного управления и акселерометра являются примерами приема информации или данных от оператора.
В одном аспекте изобретение обеспечивает медицинский инструмент, содержащий систему высокоинтенсивного сфокусированного ультразвука, содержащую ультразвуковой преобразователь с регулируемой частотой ультразвукового воздействия для фокусирования ультразвука в объем ультразвукового воздействия. Ультразвуковой преобразователь содержит первую решетку и вторую решетку емкостных микромеханических преобразователей. Каждый из емкостных микромеханических ультразвуковых преобразователей имеет отдельно управляемую частоту ультразвукового воздействия. Медицинский инструмент дополнительно содержит процессор для управления медицинским инструментом. Медицинский инструмент дополнительно содержит память для хранения машинно-выполняемых команд. Выполнение команд заставляет процессор принимать план терапии, характеризующий целевую зону внутри субъекта. План терапии может в некоторых вариантах осуществления содержать команды, которые процессор может использовать для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на целевую зону. В некоторых других вариантах осуществления план терапии содержит данные, которые можно использовать, чтобы генерировать упомянутые команды для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на целевую зону.
Выполнение команд дополнительно заставляет процессор определять расстояние прохождения сквозь субъекта до целевой зоны с использованием плана терапии. Расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя до целевой зоны. В разных вариантах осуществления расстояние прохождения может принимать другие формы или включать в себя другие данные. Например, в некоторых случаях, катетер, который содержит ультразвуковой преобразователь, может быть помещен внутри субъекта. В данном случае, расстояние прохождения будет от поверхности внутренней или внешней области субъекта до целевой зоны. В других вариантах осуществления могут присутствовать такие объекты, как гелевая прокладка и/или резервуар с водой между преобразователем и субъектом.
Выполнение команд дополнительно заставляет процессор определять частоту ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону. В некоторых случаях, фокусирование объема ультразвукового воздействия на целевую зону может воздействия для фокусирования ультразвука в объем ультразвукового воздействия. Ультразвуковой преобразователь содержит первую решетку емкостных микромеханических преобразователей. Медицинский инструмент дополнительно содержит процессор для управления медицинским инструментом. Медицинский инструмент дополнительно содержит память для хранения машинно-выполняемых команд. Выполнение команд заставляет процессор принимать план терапии, характеризующий целевую зону внутри субъекта. План терапии может в некоторых вариантах осуществления содержать команды, которые процессор может использовать для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на целевую зону. В некоторых других вариантах осуществления план терапии содержит данные, которые можно использовать, чтобы генерировать упомянутые команды для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на целевую зону.
Выполнение команд дополнительно заставляет процессор определять расстояние прохождения сквозь субъекта до целевой зоны с использованием плана терапии. Расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя до целевой зоны. В разных вариантах осуществления расстояние прохождения может принимать другие формы или включать в себя другие данные. Например, в некоторых случаях, катетер, который содержит ультразвуковой преобразователь, может быть помещен внутри субъекта. В данном случае, расстояние прохождения будет от поверхности внутренней или внешней области субъекта до целевой зоны. В других вариантах осуществления могут присутствовать такие объекты, как гелевая прокладка и/или резервуар с водой между преобразователем и субъектом.
Выполнение команд дополнительно заставляет процессор определять частоту ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону. В некоторых случаях, фокусирование объема ультразвукового воздействия на целевую зону может включать в себя выбор частоты таким образом, чтобы в целевой зоне выделялась часть ультразвуковой энергии больше, чем в окружающей ткани. Выполнение команд дополнительно заставляет процессор воздействовать ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука на частоте ультразвукового воздействия. В некоторых вариантах осуществления все емкостные микромеханические преобразователи можно приводить в действие на одной и той же частоте ультразвукового воздействия. В некоторых вариантах осуществления только часть емкостных микромеханических преобразователей может приводиться в действие на заданной частоте ультразвукового воздействия, а другие элементы приводятся в действие на другой частоте или других частотах.
Данный вариант осуществления может быть полезен потому, что емкостные микромеханические преобразователи имеют очень широкую полосу частот, которая допускает диапазон изменения частот. Частота ультразвука влияет на то, при какой глубине энергия выделяется в субъекте. Поэтому, при выборе частоты в пределах полосы частот можно максимально увеличить количество энергии, выделяемой в целевой зоне.
Данный вариант осуществления может быть также полезен потому, что можно максимально увеличить градиент температур между целевой зоной и охраняемой зоной. Охраняемая зона является областью субъекта, которую не желательно нагревать, или для которой температура остается ниже предварительно заданного порога безопасности.
В другом варианте осуществления медицинский инструмент дополнительно содержит систему магнитно-резонансной визуализации для сбора магнитно-резонансных данных из зоны визуализации. Целевая зона находится внутри зоны визуализации. Выполнение команд дополнительно заставляет процессор многократно собирать магнитно-резонансные данные с использованием системы магнитно-резонансной визуализации, чтобы реконструировать магнитно-резонансное изображение. Способ дополнительно содержит этап модификации плана терапии в соответствии с магнитно-резонансным изображением. Данный вариант осуществления может быть полезен потому, что система магнитно-резонансной визуализации допускает регулировку и управление планом терапии. Система магнитно-резонансной визуализации может входить в состав замкнутого контура управления.
В другом варианте осуществления магнитно-резонансные данные содержат тепловые магнитно-резонансные данные. Магнитно-резонансное изображение является термографическим магнитно-резонансным изображением.
Данный вариант осуществления может быть полезен потому, что магнитно-резонансная система измеряет термографическое магнитно-резонансное изображение, которое можно использовать для приведения в действие температурных карт. Температурные карты можно использовать для непосредственной проверки эффективности ультразвукового воздействия.
В другом варианте осуществления выполнение команд дополнительно заставляет процессор собирать магнитно-резонансные данные для планирования с использованием системы магнитно-резонансной визуализации. Выполнение команд дополнительно заставляет процессор реконструировать магнитно-резонансное изображение для планирования. Выполнение команд дополнительно заставляет процессор модифицировать план терапии в соответствии с магнитно-резонансным изображением для планирования. Магнитно-резонансные данные для планирования являются магнитно-резонансными данными, которые собирают перед выполнением ультразвукового воздействия. Упомянутые данные можно, например, использовать для модификации или совмещения плана терапии. Магнитно-резонансное изображение для планирования является магнитно-резонансным изображением, которое используют для исходного планирования или совмещения с планом терапии. Субъект может находиться в положении, отличающемся от того, когда был разработан или создан план терапии. Совмещение или модификация плана терапии с использованием магнитно-резонансного изображения для планирования может способствовать смягчению ошибок, обусловленных внутренней геометрией субъекта, неточно выровненного с ультразвуковым преобразователем, или при параметрах ткани, являющихся иными, чем ожидаемые или модифицированные в результате нагревания.
В другом варианте осуществления медицинский инструмент дополнительно содержит вторую решетку емкостных микромеханических преобразователей. В некоторых вариантах осуществления первая и вторая решетки емкостных микромеханических преобразователей можно приводить в действие на одинаковых или разных частотах. Это может быть полезно потому, что ультразвук от каждого из преобразователей можно использовать для независимого направления ультразвука. Если имеются разные частоты, то, пока они не являются гармоническими, ультразвук от каждой из двух решеток емкостных микромеханических преобразователей может налагаться на субъекта независимо.
В другом варианте осуществления каждый из емкостных микромеханических ультразвуковых преобразователей имеет отдельно управляемую частоту ультразвукового воздействия. Выполнение команд заставляет процессор определять частоту ультразвукового воздействия для каждого из емкостных микромеханических ультразвуковых преобразовательных элементов. Емкостные микромеханические ультразвуковые преобразователи в данном варианте осуществления могут быть отдельными емкостными микромеханическими ультразвуковыми преобразователями из первой и/или второй решетки емкостных микромеханических ультразвуковых преобразователей.
В другом варианте осуществления выполнение команд заставляет процессор определять первую частоту ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия в целевую зону. Первую частоту ультразвукового воздействия можно использовать как частоту ультразвукового воздействия первой решетки емкостных микромеханических преобразователей. В данном случае, расстояние прохождения может быть, фактически, первым расстоянием прохождения и может представлять расстояние или характеризовать расстояние между первой решеткой емкостных микромеханических преобразователей и целевой зоной. Выполнение команд дополнительно заставляет процессор определять вторую частоту ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия в целевую зону. В данном случае, вторая частота ультразвукового воздействия может быть частотой ультразвукового воздействия, используемой для второй решетки емкостных микромеханических преобразователей, и расстояние прохождения может представлять или характеризовать расстояние между второй решеткой емкостных микромеханических преобразователей и целевой зоной.
Выполнение команд заставляет процессор воздействовать ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука, использующей первую частоту ультразвукового воздействия для первой решетки емкостных микромеханических преобразователей и использующей вторую частоту ультразвукового воздействия для второй решетки емкостных микромеханических преобразователей. Частота ультразвукового воздействия вышеупомянутых вариантов осуществления может быть, фактически, либо первой частотой ультразвукового воздействия, либо второй частотой ультразвукового воздействия, упоминаемой в настоящем варианте осуществления. Данный вариант осуществления может быть полезен потому, что, когда две решетки емкостных микромеханических преобразователей приводятся в действие на разных частотах, ультразвук, генерируемый каждой, может не складываться с усилением или ослаблением одна с другой. Это может зависеть от того, является ли одна частота гармоникой другой. Это может также зависеть от расстояния исследуемой точки до преобразовательных элементов. В отсутствие гармонической зависимости, резонанс с усилением или ослаблением может иметь место в данный момент времени, но будет возникать также только на мгновение. Разные частоты могут создавать временную картину биений интенсивности ультразвука.
В другом варианте осуществления частота ультразвукового воздействия определяется с использованием модели ультразвукового моделирования. Например, для определения частоты можно использовать компьютерный код, который выполняет конечную разность для выполнения моделирования или отслеживание прохождения луча, или некоторый другой способ моделирования. Например, модель можно использовать для выбора частоты ультразвукового воздействия, которая максимально увеличивает или усиливает нагревание в одной области. В других вариантах осуществления модель можно использовать для максимального увеличения или усиления разности нагревания между одной областью и другой областью субъекта. Это может быть особенно полезно, когда имеется область субъекта, которую желательно не нагревать или выдерживать ниже некоторой температуры.
В другом варианте осуществления медицинский инструмент дополнительно содержит катетер. Катетер содержит ультразвуковой преобразователь. Данный вариант осуществления может быть полезен потому, что емкостные микромеханические ультразвуковые преобразователи являются достаточно небольшими, чтобы их можно было разместить на катетере. Это может сделать возможным катетер, который может иметь электронное управление направленностью ультразвуковых воздействий, которые имеют также регулируемую частоту ультразвукового воздействия.
В другом варианте осуществления катетер дополнительно содержит стержень с дистальным концом и проксимальным концом. Дистальный конец содержит первую решетку емкостных микромеханических ультразвуковых преобразователей и вторую решетку емкостных микромеханических ультразвуковых преобразователей. Катетер дополнительно содержит соединитель на проксимальном конце для подачи на первую решетку емкостных микромеханических ультразвуковых преобразователей и вторую решетку емкостных микромеханических ультразвуковых преобразователей электропитания и для управления первой частотой ультразвукового воздействия и второй частотой ультразвукового воздействия. Данный вариант осуществления может быть полезен потому, что он обеспечивает катетер, который содержит разные решетки емкостных микромеханических ультразвуковых преобразователей, которыми можно управлять независимо. Это может приводить к более точному или эффективному ультразвуковому воздействию.
В другом варианте осуществления первая решетка емкостных микромеханических ультразвуковых преобразователей имеет первый регулируемый фокус, и вторая решетка емкостных микромеханических ультразвуковых преобразователей имеет второй регулируемый фокус. Регулируемый фокус в контексте настоящей заявки охватывает электронное управление фокусом. Существует несколько отдельных решеток. Фазой и/или амплитудой можно управлять по отдельности для каждого из отдельных емкостных микромеханических преобразователей. Усиливающая и ослабляющая интерференция ультразвука, генерируемого каждым из емкостных микромеханических преобразователей, допускает небольшой сдвиг или перемещение объема ультразвукового воздействия. В сочетании с изменением или регулированием частоты, это дает возможность намного более детального управления объемом ультразвукового воздействия. В случае, когда первая частота ультразвукового воздействия и вторая частота ультразвукового воздействия не являются гармониками или идентичными, ультразвук от первой решетки и второй решетки емкостных микромеханических преобразователей можно направлять к разным объемам. В данном случае, объем ультразвукового воздействия будет наложением объема ультразвукового воздействия от первой и второй решеток емкостных микромеханических преобразователей.
В другом варианте осуществления дистальный конец содержит, по меньшей мере, одну интегральную схему для питания решетки емкостных микромеханических ультразвуковых преобразователей и второй решетки емкостных микромеханических ультразвуковых преобразователей и для обеспечения электронного управления первой решеткой емкостных микромеханических ультразвуковых преобразователей и второй решеткой емкостных микромеханических ультразвуковых преобразователей. Катетер дополнительно содержит шину данных между, по меньшей мере, одной интегральной схемой и соединителем. Шина данных дает возможность компьютеру или другой системе управлять интегральными схемами. В некоторых вариантах осуществления интегральная схема обеспечивает также возможность индивидуального управления частотой каждого из емкостных микромеханических ультразвуковых преобразователей. Следовательно, отдельный емкостной микромеханический ультразвуковой преобразователь можно приводить в действие на изменяющихся частотах. Это может сделать возможным намного более широкое управление ультразвуковым воздействием с помощью ультразвукового преобразователя.
В другом аспекте изобретение обеспечивает компьютерный программный продукт, содержащий машинно-выполняемые команды для выполнения процессором, управляющим медицинским инструментом. Медицинский инструмент содержит систему высокоинтенсивного сфокусированного ультразвука, содержащую ультразвуковой преобразователь с регулируемой частотой ультразвукового воздействия для фокусирования ультразвука в объем ультразвукового воздействия. Ультразвуковой преобразователь содержит первую решетку емкостных микромеханических преобразователей. Выполнение команд заставляет процессор принимать план терапии, характеризующий целевую зону внутри субъекта. Выполнение команд дополнительно заставляет процессор определять расстояние прохождения сквозь субъекта до целевой зоны с использованием плана терапии. Расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя до целевой зоны. Выполнение команд дополнительно заставляет процессор определять частоту ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону. Выполнение команд дополнительно заставляет процессор воздействовать ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука, использующей частоту ультразвукового воздействия. Преимущества данного компьютерного программного продукта изложены ранее.
В другом аспекте изобретение обеспечивает способ управления медицинским инструментом, содержащим систему высокоинтенсивного сфокусированного ультразвука. Система высокоинтенсивного сфокусированного ультразвука содержит ультразвуковой преобразователь с регулируемой частотой ультразвукового воздействия для фокусирования ультразвука в объем ультразвукового воздействия. Ультразвуковой преобразователь содержит первую решетку емкостных микромеханических преобразователей. Способ содержит этап приема плана терапии, характеризующего целевую зону внутри субъекта. Способ дополнительно содержит этап определения расстояния прохождения сквозь субъекта до целевой зоны с использованием плана терапии. Расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя до целевой зоны. Способ дополнительно содержит этап определения частоты ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону. Способ дополнительно содержит этап воздействия ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука, использующей частоту ультразвукового воздействия. Преимущества данного способа изложены ранее.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже приведено описание предпочтительных вариантов осуществления изобретения только для примера и со ссылкой на чертежи, на которых:
Фиг. 1 - изображения двух примеров емкостных решеток ультразвуковых преобразователей, полученных методом микрообработки;
Фиг. 2 - изображение катетера в соответствии с вариантом осуществления изобретения;
Фиг. 3 - изображение катетера в соответствии с дополнительным вариантом осуществления изобретения;
Фиг. 4 - изображение, поясняющее использование катетера в соответствии с дополнительным вариантом осуществления изобретения;
Фиг. 5 - изображение катетера в соответствии с дополнительным вариантом осуществления изобретения;
Фиг. 6 - изображение катетера в соответствии с дополнительным вариантом осуществления изобретения;
Фиг. 7 - блок-схема последовательности операций способа в соответствии с вариантом осуществления изобретения;
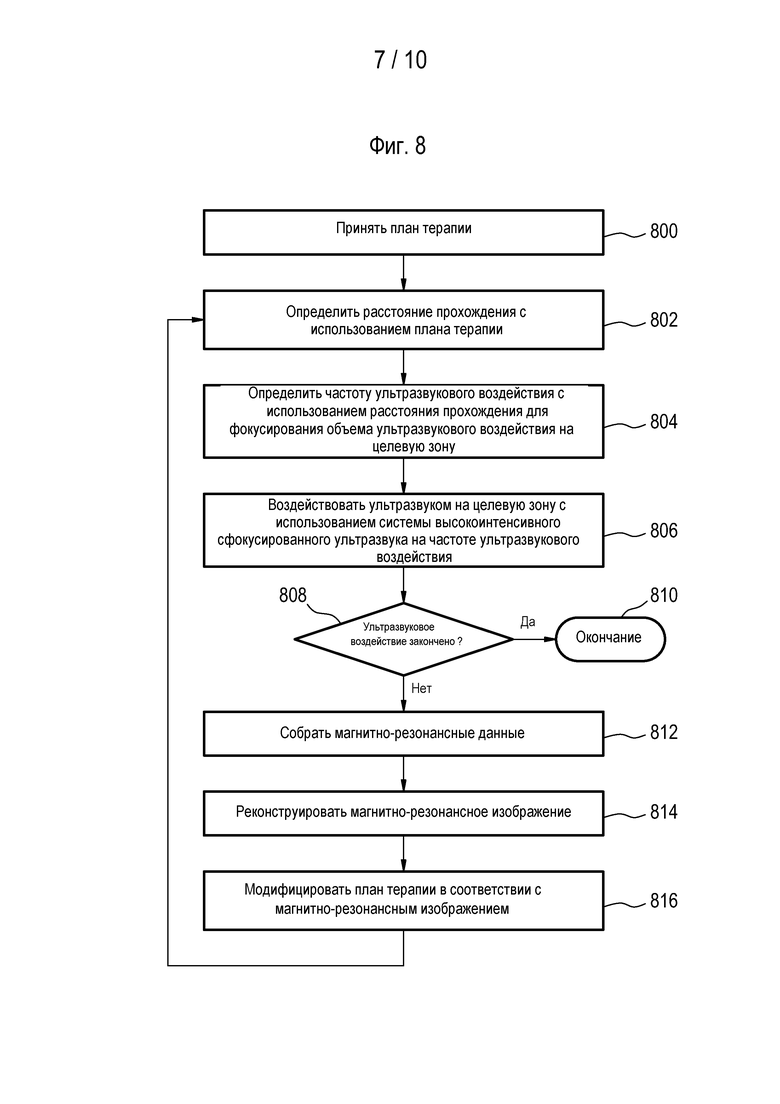
Фиг. 8 - блок-схема последовательности операций способа в соответствии с дополнительным вариантом осуществления изобретения;
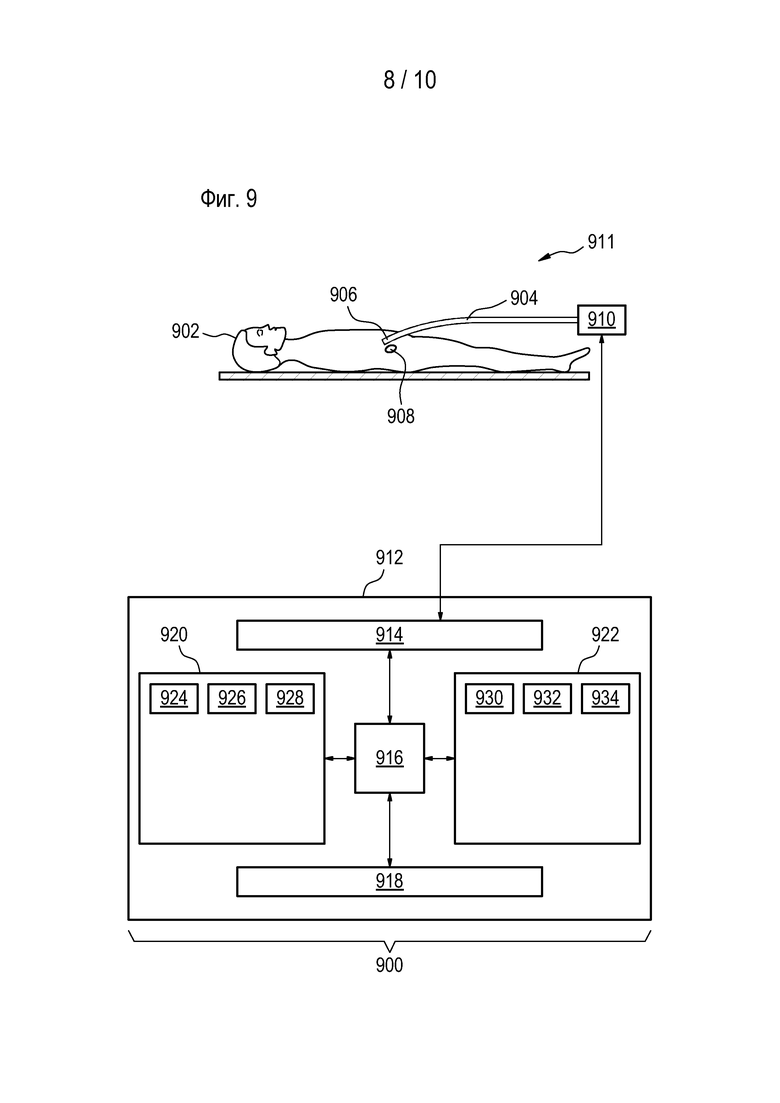
Фиг. 9 - изображение медицинского инструмента в соответствии с вариантом осуществления изобретения;
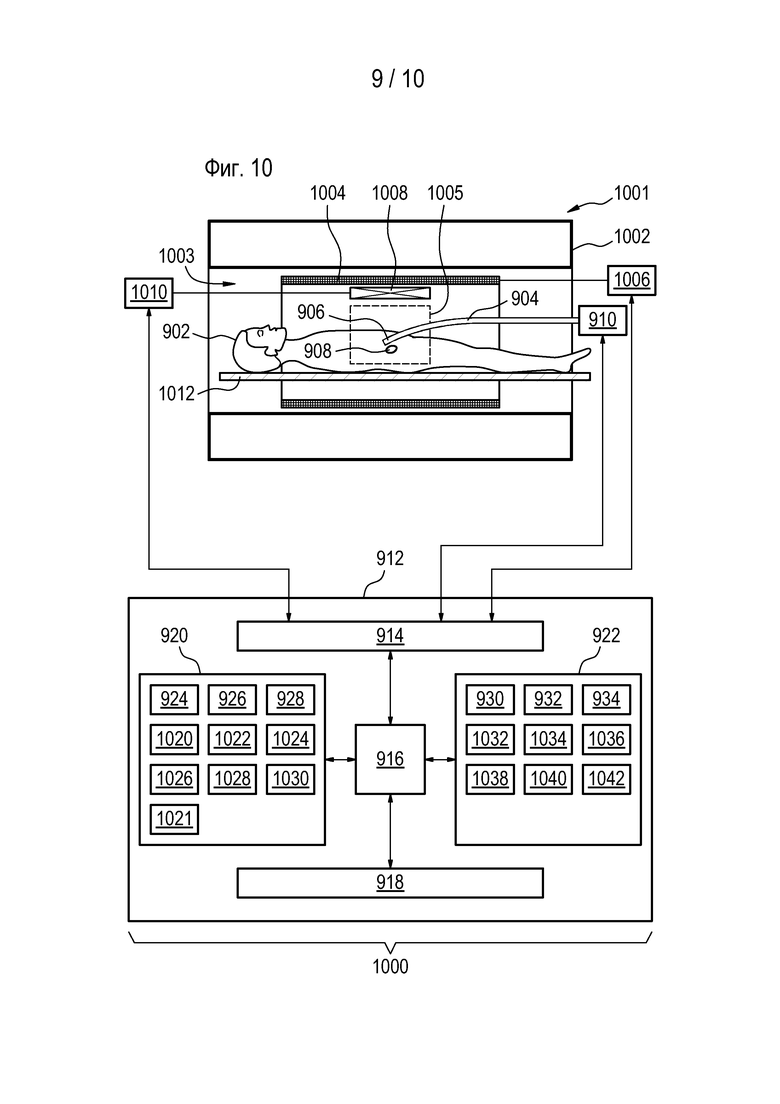
Фиг. 10 - изображение медицинского инструмента в соответствии с дополнительным вариантом осуществления изобретения;
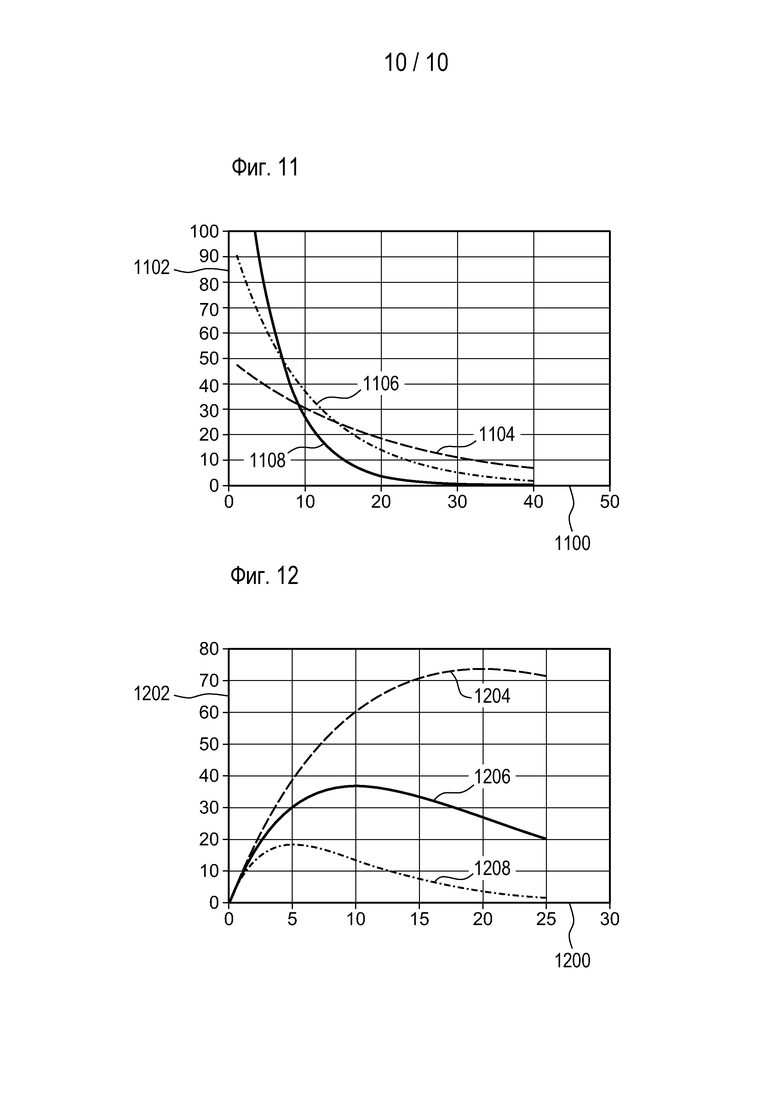
Фиг. 11 - график поглощенной ультразвуковой энергии в виде функции от глубины в миллиметрах; и
Фиг. 12 - график поглощенной ультразвуковой энергии в виде функции от частоты при трех разных глубинах.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Элементы, обозначенные одинаковыми ссылочными позициями на приведенных фигурах, являются либо эквивалентными элементами, либо выполняют одинаковую функцию. Элементы, которые были описаны раньше, не обязательно будут поясняться на последующих фигурах, если их функции эквивалентны.
На Фиг. 1 показаны два примера решеток 402, 404 емкостных микромеханических ультразвуковых преобразователей. Решетка 102 емкостных микромеханических ультразвуковых преобразователей имеет первое 108 и второе 110 электрические соединения. Решетка 102 электрически смонтирована так, что данная решетка функционирует как один преобразовательный элемент подобно тому, как функционирует традиционный пьезоэлектрический элемент. Чертеж 112 является увеличенным изображением решетки 102. Можно видеть отдельные емкостные микромеханические ультразвуковые преобразователи 114. Как можно видеть, каждый из преобразователей 114 соединен с первым 108 и вторым 110 электрическими соединениями. В данном примере полученная решетка 102 будет иметь широкую полосу частот для частоты ультразвукового воздействия, однако, индивидуальное электронное, фазовое и амплитудное управление отдельными емкостными микромеханическими ультразвуковыми преобразователями будет невозможно. Полоса частот определяется, главным образом, размером отдельных элементов 114, а также толщиной мембраны элемента.
Решетка 104 емкостных микромеханических ультразвуковых преобразователей скомпонована в виде линейных решеток. Для каждого ряда преобразователей существует набор первых 116 и вторых 118 электрических соединений. Чертеж 120 является увеличенным изображением решетки 104. Как может видеть, отдельный емкостной микромеханический ультразвуковой преобразователь 122 соединен с первым 124 и вторым 126 электрическим соединением. Соединения 124 и 126 выбраны из первого 116 и второго 118 наборов электрических соединений. Емкостные микромеханические ультразвуковые преобразователи, составляющие линейную решетку, будут управляться как группа. Частота, амплитуда и фаза ультразвукового воздействия будут определяться для всей решетки. Можно создавать также другие варианты осуществления. Например, можно создать решетку, в которой частота, амплитуда и фаза ультразвукового воздействия являются управляемыми для каждого отдельного микромеханического ультразвукового преобразователя.
На Фиг. 2 показан дистальный конец 200 катетера в соответствии с вариантом осуществления изобретения. В данном варианте осуществления имеется кольцевая решетка 202 переднего обзора. Имеется решетка емкостных микромеханических ультразвуковых преобразователей, окружающих отверстие 208. Позади кольцевой решетки 202 находятся панели решеток 204 бокового обзора. Решетки 204 формируют кольцо вокруг стержня катетера. На данной фигуре показаны различные электрические соединения 206. Кольцевую решетку 202 переднего обзора можно использовать с такой целью, как обеспечение трехмерной визуализации. Решетки 204 бокового обзора можно использовать для ультразвуковых абляции и контроля. Отдельные емкостные микромеханические ультразвуковые преобразователи можно использовать для управления поворотом пучка в процессе ультразвуковой абляции. Частотой ультразвука, подаваемого в каждую из решеток 204, можно независимо управлять. Преимущества данного варианта осуществления могут включать в себя отсутствие или минимум потребности в механическом повороте катетера. Отверстие 208 можно использовать для дополнительных инструментов или для орошения водой. Вариант осуществления, показанный на Фиг. 2, может осуществлять фокусировку в нескольких направления, и, поэтому, такие задачи, как абляция предстательной железы во всей 360-градусной области вокруг зонда, могут выполняться одновременно или с минимальным поворотом. Это имеет следствием сокращение времени терапии и, следовательно, также уменьшение затрат.
В дополнение к монтажу емкостных микромеханических ультразвуковых преобразователей в виде крупноблочных решеток или в виде линейных решеток, отдельные микромеханические ультразвуковые преобразователи могут также индивидуально возбуждаться их собственным источником.
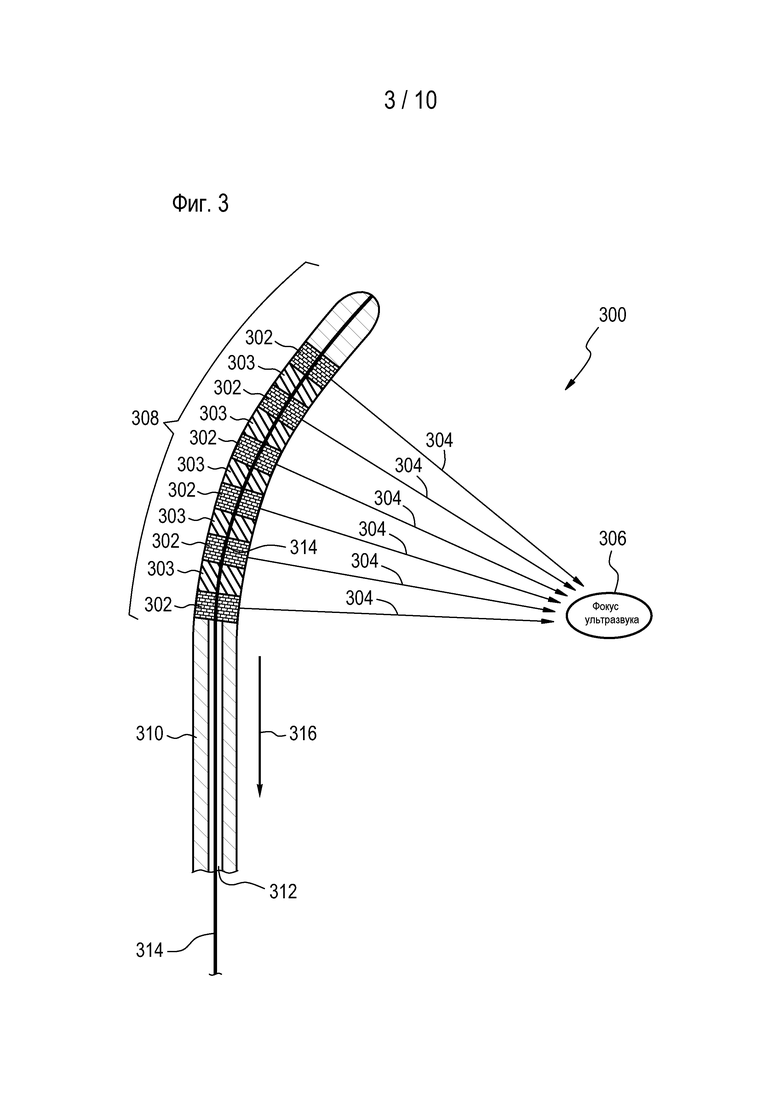
Фиг. 3 представляет катетер 300, в котором фокус регулируется механически. Катетер содержит решетки 302 емкостных микромеханических ультразвуковых преобразователей. Решетки в данном варианте осуществления могут быть гибкими или могут быть жесткими. Между каждыми из решеток 302 показан гибкий элемент 303. Линии 304 отмечают общий путь ультразвука, генерируемого решетками 302. Ультразвук 304 концентрируется в целевой зоне 306. Все решетки 302 расположены на дистальном конце 308 стержня 310 катетера 300. На дистальном конце 308 наблюдается кривизна. Это вынуждает совокупность решеток 302 фокусировать их ультразвуковое излучение в целевой зоне 306. Данную схему расположения можно регулировать механически. Например, внутри катетера может находиться трубка 312, которая жестко или полужестко закреплена к стержню 310. Внутри трубки 312 может находиться трос 314. Трос может продолжаться от трубки 312 через дистальный конец 308 катетера 300. Дистальный конец 308 может, например, содержать пружинистый материал или быть предварительно напряжен. Это может обуславливать естественную кривизну дистального конца 308. Когда трос натягивают или перемещают в направлении 318, это приводит к укорочению троса 314, что может вынуждать выпрямление дистального конца 308. Это будет изменять фокус катетера 300. Трос 314 можно также использовать для манипуляции системой тяг. Механическую регулировку приведенного катетера можно использовать в некоторых вариантах осуществления, чтобы активно управлять поворотом или проводкой катетера. Другими словами, механическую регулировку фокуса можно использовать для механической регулировки положения дистального конца. Дополнительно к механической фокусировке, отдельные решетки 302 могут также иметь электронное фазовое и амплитудное управление в дополнение к управлению частотой ультразвуковой обработки каждой из решеток 302.
При использовании Фиг. 3 в качестве примера, линии, обозначенные ссылочной позицией 304, могут также представлять расстояние 304 прохождения между емкостными микромеханическими преобразователями 302. В приведенном случае, дистальный конец 308 зонда искривлен так, что каждый из емкостных микромеханических преобразователей 302 находится, приблизительно, на одном и том же расстоянии от ультразвукового фокуса 306. В других вариантах осуществления, расстояние 304 прохождения может быть отличающимся для каждого из емкостных микромеханических преобразователей 302. Во время операции будет приниматься план терапии, характеризующий целевую зону или, в данном случае, фокус 306. Затем будет определяться расстояние 304 прохождения сквозь субъекта до целевой зоны 306, с использованием плана терапии. Расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя до целевой зоны. В случае нескольких решеток емкостных микромеханических преобразователей, расстояние прохождения может быть, фактически, несколькими расстояниями. Затем определяется частота ультразвукового воздействия для фокусировки объема ультразвукового воздействия на целевую зону, с использованием расстояния прохождения. В случае нескольких решеток емкостных микромеханических преобразователей может существовать независимая частота, вычисленная для каждой из решеток емкостных микромеханических преобразователей. Наконец, решетку или решетки емкостных микромеханических преобразователей приводят в действие с полученной определением частотой ультразвукового воздействия.
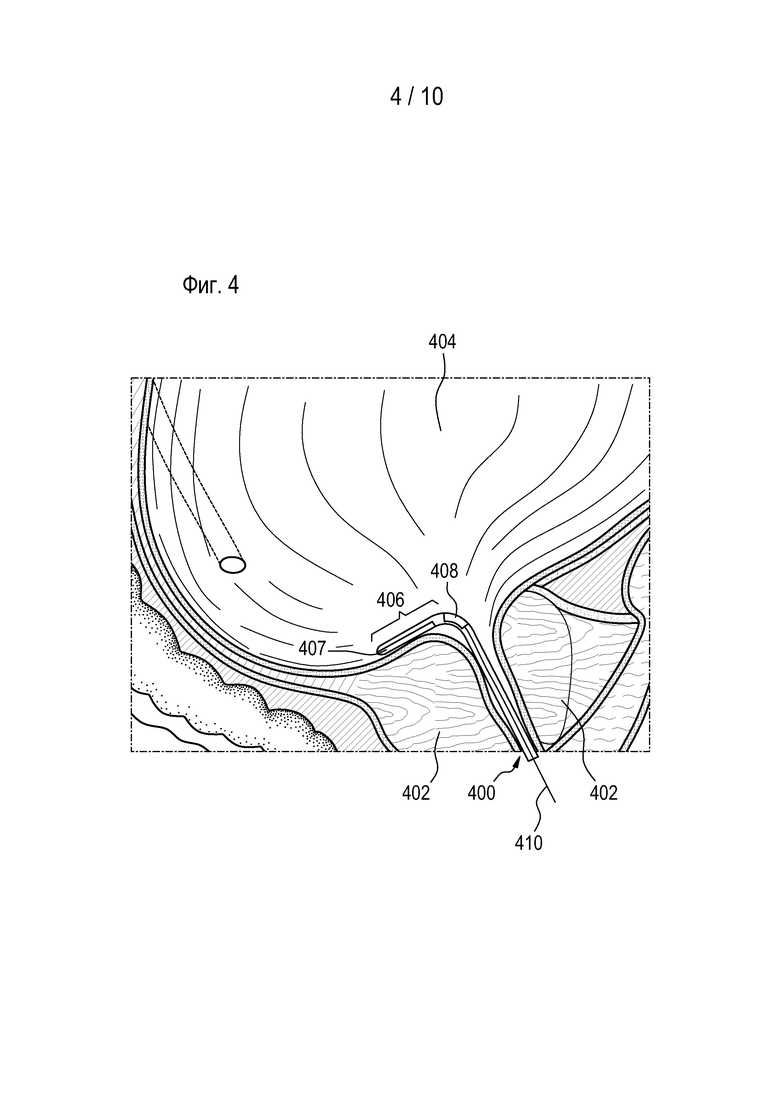
Фиг. 4 представляет катетер 400 в соответствии с вариантом осуществления изобретения, применяемый для терапии предстательной железы 402. Катетер 400 введен через уретру и в мочевой пузырь 404. В данном варианте осуществления, дистальный конец 406 катетера 400 содержит решетку 407 емкостных микромеханических ультразвуковых преобразователей. Данный вариант содержит механическое приводное устройство 408, которое сгибает дистальный конец 406. Для управления механическим приводным устройством 408 имеется трос 410. Вариант осуществления, представленный на Фиг. 4 может представляться полезным потому, что катетер 400 можно ввести в мочевой пузырь, и затем механическое приводное устройство 408 используют для позиционирования решетки емкостных микромеханических ультразвуковых преобразователей 407 таким образом, чтобы можно было воздействовать ультразвуком на предстательную железу 402. Преимущество данного варианта осуществления состоит в том, что катетер 400 может допускать ультразвуковое воздействие на предстательную железу из мочевого пузыря. Дополнительная механическая степень подвижности в мочевом пузыре может служить поддержкой при эффективном позиционировании катетера для достижения некоторых зон предстательной железы и, тем самым, снижать риск повреждения здоровой ткани.
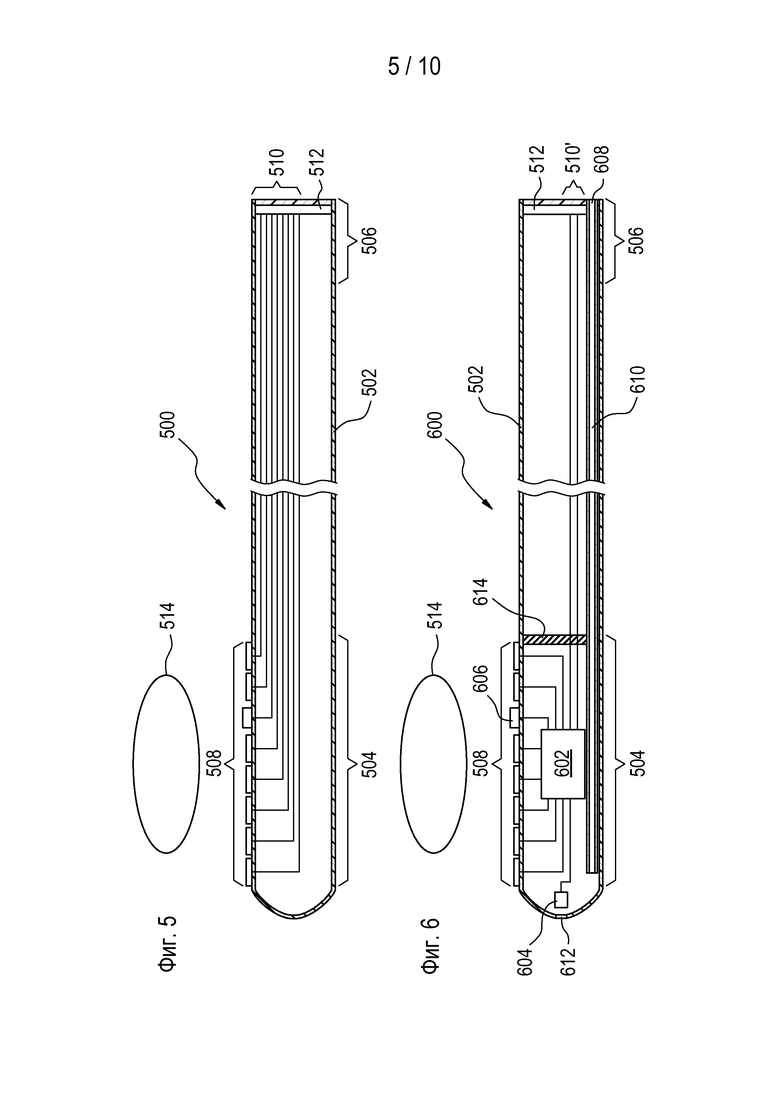
Фиг. 5 представляет дополнительный вариант осуществления катетера 500 в соответствии с вариантом осуществления изобретения. Катетер 500 содержит стержень 502 с дистальным концом 504 и проксимальным концом 506. На дистальном конце 504 находятся несколько решеток 508 емкостных микромеханических ультразвуковых преобразователей. Каждая из решеток 508 имеет свое собственное электрическое соединение 510 с соединителем 512 на проксимальном конце 506. При подаче электропитания, решетки 508 направляют ультразвуковую энергию в целевую зону 514, которая прилегает к стержню или находится сбоку от стержня 502.
Фиг. 6 представляет дополнительный вариант осуществления катетера 600 в соответствии с вариантом осуществления изобретения. Вариант осуществления, представленный на Фиг. 6, очень сходен с вариантом осуществления, показанным на Фиг. 5, но дополнен несколькими признаками. В данном варианте осуществления, отдельные решетки 508 подсоединены к интегральной схеме 602 вместо подсоединения непосредственно к соединителю 512. Интегральная схема 602 соединена с соединителем 512 шиной 510’ данных, которая выполняет функцию как подачи питания, так и соединения для передачи данных. По шине 510’ данных интегральная схема 602 принимает команды, определяющие, как возбуждать отдельные решетки 508. Интегральная схема 602 показана также как подсоединенная к датчику 604 давления или потока на наконечнике дистального конца 504. Интегральная схема 602 показана также как подсоединенная к датчику 606 температуры, который установлен среди решеток 508. В зависимости от варианта осуществления, решетки 508 и интегральную схему 602 можно применять для абляции и/или осуществления диагностического ультразвукового исследования. В некоторых вариантах осуществления, некоторые из решеток 508 можно применять для выполнения абляции, и некоторые можно применять для осуществления диагностического ультразвукового исследования в одно и то же время. В соединителе 512 имеется также впускное отверстие 608 для охлаждения текучей средой. Впускное отверстие 608 для охлаждения текучей средой соединено с трубкой 610, которая предназначена для транспорта охлаждающей текучей среды к дистальному концу 504 для его охлаждения. На наконечнике дистального конца 504 имеется выпускное отверстие 612. Дистальный конец 504 перекрыт изоляцией 614, так что вода охлаждения или охлаждающая текучая среда, которая поступает в трубку 608, вытесняется наружу через выпускное отверстие 612. В других вариантах осуществления могут быть возвратная трубка и выпускное отверстие для охлаждения текучей средой в соединителе 512.
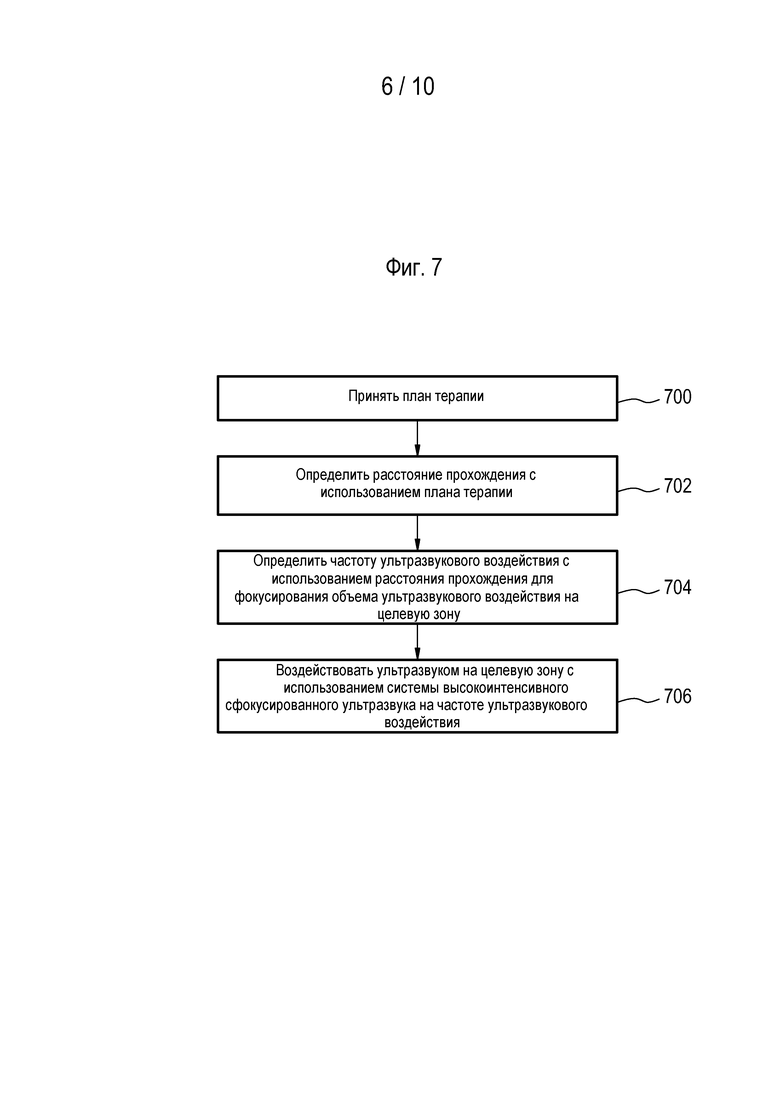
Фиг. 7 представляет блок-схему последовательности операций, которая поясняет способ в соответствии с вариантом осуществления изобретения. Сначала, на этапе 700 принимают план терапии. План терапии характеризует целевую зону внутри субъекта. Затем, на этапе 702 определяют расстояние прохождения с использованием плана терапии. Расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя к целевой зоне. Затем, на этапе 704 определяют частоту ультразвукового воздействия с использованием расстояния прохождения, для фокусирования объема ультразвукового воздействия на целевую зону. Наконец, на этапе 706 на целевую зону воздействую ультразвуком с использованием системы высокоинтенсивного сфокусированного ультразвука, на частоте ультразвукового воздействия.
Фиг. 8 представляет блок-схему последовательности операций, которая поясняет способ в соответствии с дополнительным вариантом осуществления изобретения. Сначала, на этапе 800 принимают план терапии. Снова, план терапии характеризует целевую зону внутри субъекта. Затем, на этапе 802 определяют расстояние прохождения с использованием плана терапии. Расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя к целевой зоне. Затем, на этапе 804 определяют частоту ультразвукового воздействия с использованием расстояния прохождения, для фокусирования объема ультразвукового воздействия на целевую зону. Затем, на этапе 806 на целевую зону воздействуют ультразвуком с использованием системы высокоинтенсивного сфокусированного ультразвука, на частоте ультразвукового воздействия. Этап 808 является этапом принятия решения, и вопрос заключается в том, закончено ли ультразвуковое воздействие. Если ультразвуковое воздействие закончено, то способ переходит к этапу 810, который является окончанием. Ультразвуковое воздействие в данный момент прекращается. Если ультразвуковое воздействие не закончено, то способ переходит к этапу 812. На этапе 812 собирают магнитно-резонансные данные. Данные можно собирать с использованием системы магнитно-резонансной визуализации. Затем, на этапе 814 реконструируют магнитно-резонансное изображение с использованием магнитно-резонансных данных. В некоторых вариантах осуществления магнитно-резонансные данные могут содержать данные магнитно-резонансной термометрии. В данном случае магнитно-резонансное изображение может содержать тепловую карту. Затем, на этапе 816 план терапии модифицируют в соответствии с магнитно-резонансным изображением. Например, если субъект переместился в процессе терапии, или если некоторые области субъекта являются слишком горячими или не достаточно нагрелись, то план терапии может быть скорректирован или изменен. Затем способ возвращается на этап 802, и снова определяют расстояние прохождения с использованием плана терапии. Таким образом, способ продолжается по циклу, пока на этапе 808 не определяют, закончено ли ультразвуковое воздействие, и способ заканчивается на этапе 810.
Фиг. 9 изображает медицинский инструмент 900 в соответствии с вариантом осуществления изобретения. На данной фигуре показан субъект 902 с введенным катетером 904. Катетер 904 имеет дистальное расстояние 906 около целевой зоны 908. Катетер 904 может относиться к типу, изображенному в предыдущих вариантах осуществления. Катетер 906 подсоединен к интерфейсу 910 катетера. Интерфейс 910 катетера обеспечивает функции управления катетером 904 и его питания. Система 911 высокоинтенсивного сфокусированного ультразвука является комбинацией катетера 904 и интерфейса 910 катетера. Можно также осуществить системы высокоинтенсивного сфокусированного ультразвука других типов. Например, решетка, применяемая для терапии молочной железы, когда молочная железа введена в чашеобразную конструкцию, окруженную решетками емкостных микромеханических преобразователей, также является вариантом осуществления согласно изобретению. Аналогично, большеразмерный ультразвуковой преобразователь также можно сформировать из емкостных микромеханических преобразователей и применить в системе, которая подобна системам, применяемым для нагревания фибром матки.
В приведенном варианте осуществления интерфейс 910 катетера подсоединен к аппаратному интерфейсу 914 компьютера 912. Компьютер 912 дополнительно содержит процессор 916, который связан с аппаратным интерфейсом, а также с пользовательским интерфейсом 918, компьютерным запоминающим устройством 920 и компьютерной памятью 922. Процессор 916 способен управлять работой и функциями интерфейса 910 катетера через посредство аппаратного интерфейса 914.
Компьютерное запоминающее устройство показано как содержащее план 924 терапии. Компьютерное запоминающее устройство дополнительно показано как содержащее расстояние 926 прохождения, которое вычислено с использованием плана 924 терапии. Компьютерное запоминающее устройство 920 дополнительно показано как содержащее частоту 928 ультразвукового воздействия, которая вычисляется с использованием расстояния 926 прохождения.
Компьютерная память 922 показана как содержащая модуль 930 вычисления расстояния прохождения. Модуль 930 вычисления расстояния прохождения содержит компьютерно-выполняемый код, который дает процессору возможность вычислять расстояние 926 прохождения с использованием плана 924 терапии. Компьютерная память 922 показана как дополнительно содержащая модуль 932 определения частоты ультразвукового воздействия. Модуль 932 определения частоты ультразвукового воздействия дополнительно содержит машинно-выполняемые команды, которые делают возможным вычисление частоты 924 ультразвукового воздействия с использованием расстояния 926 прохождения. Компьютерная память 922 показана как дополнительно содержащая модуль 934 управления системой высокоинтенсивного сфокусированного ультразвука. Модуль 934 управления системой высокоинтенсивного сфокусированного ультразвука содержит компьютерно-выполняемый код, который дает процессору 916 возможность генерировать команды, которые делают возможным использование плана 924 терапии, который позволяет управлять интерфейсом 910 катетера.
При использовании приведенного медицинского инструмента 900, оператор может ввести катетер 904 в субъект 902. Так как фокус катетера 904 является регулируемым, то процессор 916 может посылать команды в интерфейс 910 катетера таким образом, чтобы целевая зона 908 нагревалась катетером 904. Целевая зона нагревается с возможностью управления катетером 904 и автоматически управляется компьютерной системой 912.
Фиг. 10 представляет медицинский инструмент 1000 в соответствии с дополнительным вариантом осуществления изобретения. Медицинский инструмент 1000, показанный на Фиг. 10, подобен медицинскому инструменту, показанному на Фиг. 9, за исключением того, что в нем дополнительно имеется система 1001 магнитно-резонансной визуализации.
Система 1001 магнитно-резонансной визуализации содержит магнит 1002. Магнит 1002 является сверхпроводящим магнитом цилиндрического типа. Магнит содержит криостат, охлаждаемый жидким гелием, со сверхпроводящими катушками. Можно также применять постоянные или резистивные магниты. Применение магнитов других типов также возможно, например, можно также применять как разрезной цилиндрический магнит, так и, так называемый, открытый магнит. Разрезной цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две секции, чтобы обеспечивать возможность доступа к изоплоскости магнита, так что упомянутые магниты можно, например, применять в связи с терапией пучком заряженных частиц. Открытый магнит имеет две секции магнита, одну над другой с пространством посередине, которое является достаточно большим для вмещения субъекта: компоновка зоны двух секций аналогична компоновке катушки Гельмгольца. Открытые магниты широко применяются потому, что субъект меньше ограничен. Внутри криостата цилиндрического магнита находится совокупность сверхпроводящих катушек. Внутри туннеля цилиндрического магнита находится зона 1005 визуализации, в которой магнитной поле является достаточно сильным и однородным, чтобы выполнять магнитно-резонансную визуализацию.
Внутри туннеля 1003 магнита находится также градиентная магнитная катушка 1004, в которую подается ток посредством источника 1006 питания градиентных магнитных катушек. Градиентная магнитная катушка 1004 применяется для пространственного кодирования магнитных спинов внутри зоны 1005 визуализации магнита 1002 во время сбора магнитно-резонансных данных. Предполагается, что градиентная магнитная катушка 1004 является репрезентативной. Обычно, градиентные магнитные катушки содержат три отдельных набора катушек для пространственного кодирования по трем ортогональным пространственным направлениям. Ток, подаваемый в градиентные магнитные катушки 1004, является управляемым в зависимости от времени и может линейно-изменяемым и/или импульсным.
Внутри туннеля 1003 магнита находится зона 1005 визуализации, в которой магнитной поле является достаточно однородным для выполнения магнитно-резонансной визуализации. Вблизи зоны 1005 визуализации находится антенна 1008. Антенна 1008 подсоединена к приемопередатчику 1010. Радиочастотная антенна 1008 предназначена для манипулирования ориентациями магнитных спинов внутри зоны 1005 визуализации и для приема передач радиосигналов от спинов также внутри зоны визуализации. Радиочастотная антенна может содержать множественные катушечные элементы. Радиочастотную антенну можно также называть каналом. Радиочастотная катушка соединена с радиочастотным приемопередатчиком 1010. Радиочастотную катушку 1008 и радиочастотный приемопередатчик 1010 можно заменить отдельными передающими и приемными катушками и отдельными передатчиком и приемником. Радиочастотная антенна предназначена также для представления специализированной передающей антенны и специализированной приемной антенны. Аналогично, приемопередатчик 1010 может также представлять отдельные передатчик и приемники.
Субъект 902 показан уложенным на опору 1012 субъекта. Как на Фиг. 9, катетер 904 введен в субъекта 902. Приемопередатчик 1010, источник 1006 питания градиентных магнитных катушек и интерфейс 904 катетера показы как подсоединенные к аппаратному интерфейсу 914 компьютерной системы 912. Компьютерная система 912 на Фиг. 10 эквивалентна компьютерной системе 912 на Фиг. 9. Различные программные компоненты, хранящиеся в компьютерной системе 922, и компоненты компьютерного запоминающего устройства 920 эквивалентны на обеих Фиг.
Компьютерное запоминающее устройство 920 показано как дополнительно содержащее импульсную последовательность 1020. Импульсная последовательность 1020 является набором команд, которые процессор 916 может использовать для управления системой 1001 магнитно-резонансной визуализации, или которые могут быть использованы, чтобы генерировать команды для управления системой 1001 магнитно-резонансной визуализации. Компьютерное запоминающее устройство 920 показано как дополнительно содержащее магнитно-резонансные данные 1021, которые были собраны с использованием импульсной последовательности 1020. Компьютерное запоминающее устройство 920 показано также как содержащее тепловые магнитно-резонансные данные 1022, которые могли быть собраны также с использованием импульсной последовательности 1020. Компьютерное запоминающее устройство 920 показано как содержащее магнитно-резонансное изображение 1024, которое реконструировано с использованием магнитно-резонансных данных 1021. Компьютерное запоминающее устройство 920 дополнительно показано как содержащее термографическое магнитно-резонансное изображение 1026, которое реконструировано с использованием тепловых магнитно-резонансных данных 1022. Компьютерное запоминающее устройство 920 дополнительно показано как содержащее магнитно-резонансные данные 1028 для планирования. Компьютерное запоминающее устройство 920 дополнительно показано как содержащее магнитно-резонансное изображение 1028 для планирования, которое реконструировано с использованием магнитно-резонансных данных 1028 для планирования.
Компьютерная память 922 показана как содержащая модуль 1032 управления системой магнитно-резонансной визуализации. Модуль 1032 управления системой магнитно-резонансной визуализации содержит компьютерно-выполняемый код, который дает процессору 916 возможность использовать импульсную последовательность 1020, чтобы генерировать команды для управления работой и функциями системы 1001 магнитно-резонансной визуализации. Компьютерная память 922 дополнительно содержит модуль 1034 реконструкции изображения. Модуль 1034 реконструкции изображения содержит компьютерно-выполняемый код, который дает процессору 916 возможность реконструировать магнитно-резонансное изображение 1024 по магнитно-резонансным данным 1021. Модуль 1032 управления системой магнитно-резонансной визуализации можно также использовать для синтеза или реконструкции магнитно-резонансного изображения 1030 для планирования по магнитно-резонансным данным 1028 для планирования. Компьютерная память 922 показана как дополнительно содержащая модуль 1036 формирования тепловой карты. Модуль 1036 формирования тепловой карты содержит компьютерно-выполняемый код, который дает процессору 916 возможность синтезировать термографическое магнитно-резонансное изображение 1026 по тепловым магнитно-резонансным данным 1022.
Компьютерная память 922 дополнительно содержит модуль 1038 модификации плана терапии. Модуль 1038 модификации плана терапии дает процессору 916 возможность модифицировать план 924 терапии с использованием магнитно-резонансного изображения 1024, термографического магнитно-резонансного изображения 1026 и/или магнитно-резонансного изображения 1030 для планирования. Компьютерная память 922 показана как дополнительно содержащая модуль 1040 совмещения изображений. Модуль 1040 совмещения изображений содержит компьютерно-выполняемый код, который может быть использован процессором 916 для совмещения магнитно-резонансного изображения 1024, термографического магнитно-резонансного изображения 1026 и/или магнитно-резонансного изображения 1030 для планирования с субъектом 1002. Модуль 1040 совмещения изображений может, например, использоваться модулем 1038 модификации плана терапии. Компьютерная память 922 показана также как содержащая модуль 1042 ультразвукового моделирования. Модуль 1042 ультразвукового моделирования содержит компьютерно-выполняемый код, который дает процессору 916 возможность моделировать результаты воздействия ультразвуком, генерируемым катетером 906. Модуль 1042 ультразвукового моделирования может быть использован в связи с модулем 1038 модификации плана терапии.
Обычно, при трансуретральном HIFU применяли пьезокерамические или пьезокомпозитные преобразователи. Это в определенной степени означает, что возможна только 1-мерная фазированная решетка вследствие ограниченного пространства, доступного внутри уретры. При технологии CMUT, дело больше не обстоит так, и внутрь уретры могут легко входить 2-мерные решетки, и они являются также решетками с высокой степенью управляемости направленностью. Это допускает применение более сложных способов ультразвукового воздействия, и также допускает применение более сложных способов обратной связи. Управление направленностью пучка и его траекториями делаются возможными с некоторыми практическими ограничениями, и, кроме того, частоту можно изменять быстро и на протяжении непрерывной полосы частот, без потребности в изменениях электронной аппаратуры. Следовательно, для абляции предстательной железы можно разработать более сложные алгоритмы обратной связи, которые прежде были невозможными. Кроме того, ультразвуковое воздействие можно делать и может быть управляемым в нескольких радиальных направлениях одновременно, если сечение катетера имеет, например, гексагональную форму.
Емкостные микромеханические преобразователи (CMUT) недавно продемонстрировали перспективность для трансуретральной HIFU абляции предстательной железы. Ширина полосы частот, достижимая с CMUT, обычно больше, чем для пьезоэлектрических преобразователей, что делает CMUT в большей мере адаптируемыми для областей применения, в которых требуется больший диапазон глубин проникания. Данные CMUT привносят также новый диапазон возможностей, которые делают возможными новые подходы к выполнению трансуретральной HIFU абляции.
1-Мерные фазированные решетки, которые обычно изготавливают с использованием пьезоэлектрических решеток, допускают только очень грубое управление с обратной связью, при котором мощность можно изменять по элементам вдоль фазовой решетки. Пьезоэлектрические преобразователи в виде 2-мерной фазированной решетки, в свою очередь, трудно вставлять во внутреннее пространство уретры. 2-Мерные решетки CMUT имеют меньший размер элементов, позволяющий данным решеткам входить внутрь уретры, и могут также иметь несколько других преимуществ.
С трансуретральным CMUT можно сделать возможным управление направленностью пучка внутри предстательной железы. Это, в свою очередь позволяет применять такие алгоритмы управления для трансуретральной терапии предстательной железы, которые обычно применимы только для HIFU терапии с использованием внешних преобразователей. Например, температурой и/или тепловой дозой можно управлять в разных частях предстательной железы посредством ограничения зон для обхода и, затем, ограничения зон, которые следует подвергнуть абляции (обычно в остальной части предстательной железы в случае терапии всей железы). Разные версии 2-мерного или 3-мерного ПИД (пропорционально-интегрально-дифференциального) контроллера можно, например, применить для нагревания таких зон внутри текущего нагреваемого объема, которые испытывают наибольший недостаток температуры в сравнении с целевой температурой. Последний подход требует также учета энергии, возможно, подведенной до того, как получают следующую свежую информацию о температуре. Способ, по сути, уже широко известен, и можно также применять другие способы управления с обратной связью.
CMUT могут также допускать свободный выбор частоты в пределах полосы частот преобразователя, которая обычно является достаточно широкой. Преобразователи на основе пьезоэлектрического эффекта могут иметь немного (например, обычно, 1 или 2) дискретных частот для выбора из них, в лучшем случае. Это допускает изменение еще одного параметра. Уравнение для локально поглощенной ультразвуковой энергии, в предположении потерь только на поглощение (т.е. равенства коэффициента ослабления коэффициенту поглощения) для плоской волны в одной ткани, имеет вид:
где ρ означает давление на поверхности ткани, 

Приведенная зависимость графически представлена на Фиг. 11. Фиг. 11 показывает поглощенную ультразвуковую энергию 1102 как функцию глубины 1100 в миллиметрах. Приведенные значения вычислены в предположении линейной зависимости поглощения от ослабления. Приведены три графика значений: для поглощения при 5 МГЦ 1104, 10 МГц 1106 и 20 МГц 1108. На небольших глубинах максимальная частота 20 МГц 1108 характеризуется наилучшим поглощением, тогда как на промежуточных глубинах лучше 10 МГц 1106, и на глубинах более 15 мм наилучшей является частота 5 МГц 1104. В приведенном примере принято значение альфа 5 Нп/МГц/м.
Для некоторой глубины x имеется оптимальная частота, которая максимально увеличивает поглощенное количество ультразвуковой энергии, которая дается выражением:
и по-прежнему использует предположение, что поглощение линейно возрастает с частотой. Даже если бы упомянутое предположение не выполнялось полностью, имеет оптимальная частота для максимального усиления поглощения, и чем больше требуемая глубина проникновения, тем ниже должна быть частота.
Фигура 12 представляет поглощение на данной целевой глубине как функцию частоты. Фиг. 12 показывает поглощенную ультразвуковую энергию 1202 как функцию частоты 1200 на трех разных глубинах. Кривая для 5 мм обозначена 1204, кривая для 10 мм обозначена 1206, и кривая для 20 мм обозначена 1208. Как представляется в приведенном примере, на кривой 1204 для 5 мм, максимальное поглощение имеет место при 20 МГц, на кривой 1206 для 10 мм максимальное поглощение имеет место при 10 МГц, и на кривой 1204 для 5 мм максимальное поглощение имеет место при 20 МГц. В данном примере значение альфа также принято 5 Нп/МГц/м.
Не обязательно, чтобы частота, дающая максимальное поглощение, была предпочтительной, например, вблизи от капсулы предстательной железы. В данном случае, может быть, что частота, которая дает более быстрое снижение поглощенной энергии, является предпочтительной для сохранения капсулы и любых потенциально уязвимых тканей непосредственно снаружи предстательной железы от слишком сильного нагревания. Снова в предположении линейной зависимости, максимальное снижение поглощения (максимум производной от поглощения) на некотором расстоянии получают на частоте, в два раза выше частоты, дающей максимальное поглощение.
Наконец, нагревание в нескольких направлениях может выполняться одновременно, если элементами CMUT охвачено более, чем одно радиальное направление. Сегментом предстательной железы, нагреваемым каждой нагревающей 2-мерной решеткой, например, 8 в случае гексагонального сечения, можно управлять по отдельности, как изложено выше в 2 или 3 измерениях, в зависимости от полученных МР изображений.
Вариант осуществления изобретения может содержать алгоритм управления, который может допускать, чтобы частота была одной из управляющих переменных. Обычные пьезопреобразователи могут иметь лишь немного дискретных частот, которые можно использовать, тогда как CMUT имеют широкую непрерывную полосу частот, из которой следует выбирать. Переключение частоты может требовать обычно небольшое число циклов ультразвука (US) для выхода на полное выходное давление на новой частоте. Данный отрезок времени подобен тому, как если бы фаза элементов изменялась в процессе электронного управления направленностью. Фиг. 11 и 12 показывают, что можно получить существенные улучшения поглощения посредством изменения используемой частоты. Не обязательно, чтобы частота, дающая максимальное поглощение, была предпочтительной, например, вблизи от капсулы предстательной железы. В данном случае возможно, что частота, которая дает более быстрое снижение поглощенной энергии, является предпочтительной для сохранения капсулы и любых потенциально уязвимых тканей непосредственно снаружи предстательной железы от слишком сильного нагревания. В данном случае, может быть, что частота, которая дает более быстрое снижение поглощенной энергии, является предпочтительной для сохранения капсулы от слишком сильного нагревания. Подобное решение может применяться вблизи нервных узлов. Оптимальная частота может находиться где-то между двумя частотами, так как частота, обеспечивающая максимальную скорость снижения, будет выше, чем частота, дающая максимальное поглощение. Акустическое и термическое моделирование также может оказать помощь при обеспечении оценки оптимальной частоты для использования.
Изменение частоты ультразвукового воздействия может представлять особую ценность при небольших глубинах проникновения, а также в случае, когда управление направленностью ограничено небольшим размером 2-мерной решетки в одном направлении. Это может быть справедливо для трансуретральной абляции предстательной железы и/или ультразвуковой гипертермии, которые составляют, таким образом, область применения, по всей вероятности, получающей пользу от приведенных понятий.
Варианты осуществления изобретения могут быть применимы к трансуретральной HIFU абляции. Трансректальная абляция предстательной железы также может получить полезный результат, как, возможно, внутритканевые применения HIFU на базе катетера. Применения, в которых гипертермия вызывается ультразвуковым воздействием, могут получать такой же полезный результат, как абляционные применения. HIFU абляцию применяют для разрушения ткани непосредственно нагреванием, тогда как гипертермию, вызываемую посредством HIFU, можно применять, например, для сенсибилизации ткани к лучевой терапии, для локальной доставки лекарств и для локальной генной терапии и/или экспрессии.
Хотя настоящее изобретение подробно представлено на чертежах и охарактеризовано в вышеприведенном описании, упомянутые чертежи и описание следует считать наглядными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
Специалистами в данной области техники, в процессе практического применения заявленного изобретения, на основании изучения чертежей, описания и прилагаемой формулы изобретения, могут быть разработаны и реализованы другие варианты раскрытых вариантов осуществления. В формуле изобретения, выражение «содержащий» не исключает других элементов или этапов, и единственное число не исключает множественного числа. Единственный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые признаки упомянуты во взаимно различающихся зависимых пунктах формулы изобретения, не означает невозможность применения комбинации упомянутых признаков в подходящем случае. Компьютерная программа может храниться/распространяться на подходящем носителе, например, оптическом носителе данных или полупроводниковом носителе, поставляемых совместно с другими аппаратным обеспечением или в его составе, но может также распространяться в других формах, например, по сети Интернет или в других проводных или беспроводных телекоммуникационных системах. Никакие ссылочные позиции в формуле изобретения нельзя интерпретировать как ограничивающие объем изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
102 решетка емкостных микромеханических ультразвуковых преобразователей
104 решетка емкостных микромеханических ультразвуковых преобразователей
108 первое электрическое соединение
110 второе электрическое соединение
112 увеличенное изображение решетки 102
114 емкостной микромеханический ультразвуковой преобразователь
116 набор первых электрических соединений
118 набор вторых электрических соединений
120 увеличенное изображение решетки 104
122 емкостной микромеханический ультразвуковой преобразователь
124 первое электрическое соединение
126 второе электрическое соединение
200 дистальный конец катетера
202 кольцевая решетка переднего обзора
204 решетка бокового обзора
205 стержень
206 электрическое соединение
208 отверстие
300 катетер
302 решетка емкостных микромеханических ультразвуковых преобразователей
303 гибкий элемент
304 путь ультразвука
306 целевая зона
308 дистальный конец
310 стержень
312 трубка
314 трос
316 направление перемещения троса
400 катетер
402 предстательная железа
404 мочевой пузырь
406 дистальный конец
407 решетка емкостных микромеханических ультразвуковых преобразователей
408 механическое приводное устройство
410 трос
500 катетер
502 стержень
504 дистальный конец
506 проксимальный конец
508 решетка емкостных микромеханических ультразвуковых преобразователей
510 электрические соединения
510’ шина данных и подачи питания
512 соединитель
514 целевая зона
600 катетер
602 процессор
604 датчик потока или давления
606 датчик температуры
608 впускное отверстие для охлаждения текучей средой
610 трубка
612 выпускное отверстие
614 изоляция
900 медицинский инструмент
902 субъект
904 катетер
906 дистальный конец
908 целевая зона
910 интерфейс катетера
911 система высокоинтенсивного сфокусированного ультразвука
912 компьютер
914 аппаратный интерфейс
916 процессор
918 пользовательский интерфейс
920 компьютерное запоминающее устройство
922 компьютерная память
924 план терапии
926 расстояние прохождения
928 частота ультразвукового воздействия
930 модуль вычисления расстояния прохождения
932 модуль определения частоты ультразвукового воздействия
934 модуль управления системой высокоинтенсивного сфокусированного ультразвука
1000 медицинский инструмент
1001 система магнитно-резонансной визуализации
1002 магнит
1003 туннель магнита
1004 градиентная магнитная катушка
1005 зона визуализации
1006 источника питания градиентных магнитных катушек
1008 антенна
1010 приемопередатчик
1012 опора для пациента
1020 импульсная последовательность
1021 магнитно-резонансные данные
1022 тепловые магнитно-резонансные данные
1024 магнитно-резонансное изображение
1026 термографическое магнитно-резонансное изображение
1028 магнитно-резонансные данные для планирования
1030 магнитно-резонансное изображение для планирования
1032 модуль управления системой магнитно-резонансной визуализации
1034 модуль реконструкции изображения
1036 модуль формирования тепловой карты
1038 модуль модификации плана терапии
1040 модуль совмещения изображений
1042 модель ультразвукового моделирования
1100 глубина (мм)
1102 поглощенная энергия
1104 поглощение как функция глубины проникновения при 5 МГц
1106 поглощение как функция глубины проникновения при 10 МГц
1108 поглощение как функция глубины проникновения при 20 МГц
1200 частота МГц
1202 поглощенная энергия
1204 поглощение как функция частоты при 5 мм
1206 поглощение как функция частоты при 10 мм
1208 поглощение как функция частоты при 20 мм
Группа изобретений относится к медицинской технике, а именно к средствам применения емкостных микромеханических ультразвуковых преобразователей для высокоинтенсивного сфокусированного ультразвука. Ультразвуковой медицинский инструмент содержит систему высокоинтенсивного сфокусированного ультразвука, содержащую ультразвуковой преобразователь с регулируемой частотой ультразвукового воздействия, при этом ультразвуковой преобразователь содержит первый массив емкостных микромеханических преобразователей, процессор для управления медицинским инструментом, память для хранения машинно-выполняемых команд. Выполнение команд заставляет процессор принимать план терапии, характеризующий целевую зону внутри субъекта, определять расстояние прохождения сквозь субъект до целевой зоны с использованием плана терапии, определять частоту ультразвукового воздействия с использованием расстояния прохождения, воздействовать ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука на частоте ультразвукового воздействия. Медицинский инструмент включает в себя интегральную схему для управления частотой ультразвукового воздействия каждого из упомянутых емкостных микромеханических преобразователей на основании вычисления из расстояния прохождения ультразвукового воздействия микромеханического преобразователя. Машиночитаемый носитель данных включен в ультразвуковой медицинский инструмент. Способ управления определяется работой ультразвукового медицинского инструмента. Использование группы изобретений позволяет увеличить количество энергии, выделяемой в целевой зоне при увеличении градиента температур между целевой и охраняемой зонами. 3 н. и 10 з.п ф-лы, 12 ил.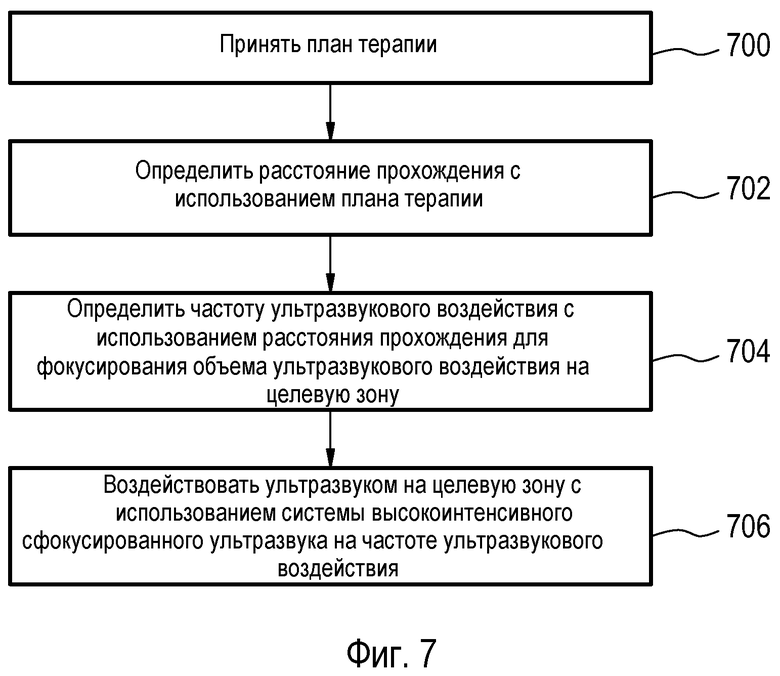
1. Ультразвуковой медицинский инструмент (900, 1000), содержащий:
- систему (911) высокоинтенсивного сфокусированного ультразвука, содержащую ультразвуковой преобразователь (102, 104, 202, 204, 302, 407, 508) с регулируемой частотой ультразвукового воздействия для фокусирования ультразвука в объем ультразвукового воздействия, при этом упомянутый ультразвуковой преобразователь содержит первый массив емкостных микромеханических преобразователей (102, 104, 202, 204, 302, 407, 508);
- процессор (916) для управления упомянутым медицинским инструментом;
- память (922) для хранения машинно-выполняемых команд (930, 933, 934), причем выполнение команд заставляет процессор:
- принимать (700, 800) план (924) терапии, характеризующий целевую зону (908) внутри субъекта (902);
- определять (702, 802) расстояние (926) прохождения сквозь субъекта до целевой зоны с использованием плана терапии, причем расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя до целевой зоны;
- определять (704, 804) частоту (928) ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону; и
- воздействовать (706, 806) ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука на частоте ультразвукового воздействия, и при этом
выполнение команд заставляет процессор вычислять частоту ультразвукового воздействия для каждого из емкостных микромеханических ультразвуковых преобразовательных элементов из расстояния прохождения от каждого емкостного микромеханического ультразвукового преобразовательного элемента до целевой зоны и
каждый из емкостных микромеханических ультразвуковых преобразователей имеет отдельно управляемую частоту ультразвукового воздействия, упомянутый медицинский инструмент включает в себя интегральную схему для управления частотой ультразвукового воздействия каждого из упомянутых емкостных микромеханических преобразователей как вычислено из расстояния прохождения упомянутого емкостного микромеханического преобразователя.
2. Медицинский инструмент по п.1, дополнительно содержащий второй массив емкостных микромеханических преобразователей, при этом выполнение команд заставляет процессор определять первую частоту ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону, при этом выполнение команд заставляет процессор определять вторую частоту ультразвукового воздействия с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону и при этом выполнение команд заставляет процессор воздействовать ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука, использующей первую частоту ультразвукового воздействия для первого массива емкостных микромеханических преобразователей и использующей вторую частоту ультразвукового воздействия для второго массива емкостных микромеханических преобразователей.
3. Медицинский инструмент по п.2, в котором первая частота ультразвукового воздействия и вторая частота ультразвукового воздействия не являются гармониками ультразвука от первого массива и второго массива емкостных микромеханических преобразователей или идентичными ультразвуку от первого массива и второго массива емкостных микромеханических преобразователей.
4. Медицинский инструмент по п.1, в котором упомянутый медицинский инструмент дополнительно содержит систему (1001) магнитно-резонансной визуализации для сбора магнитно-резонансных данных (1021) из зоны (1005) визуализации, при этом целевая зона находится внутри зоны визуализации, причем выполнение команд дополнительно заставляет процессор многократно:
- собирать (812) магнитно-резонансные данные с использованием системы магнитно-резонансной визуализации;
- реконструировать (814) магнитно-резонансное изображение (1024); и
- модифицировать (816) план терапии в соответствии с магнитно-резонансным изображением.
5. Медицинский инструмент по п.4, в котором магнитно-резонансные данные содержат тепловые магнитно-резонансные данные (1022), и при этом магнитно-резонансное изображение является термографическим магнитно-резонансным изображением (1026).
6. Медицинский инструмент по п.4 или 5, в котором выполнение команд дополнительно заставляет процессор:
- собирать магнитно-резонансные данные (1028) для планирования с использованием системы магнитно-резонансной визуализации;
- реконструировать магнитно-резонансное изображение (1030) для планирования; и
- модифицировать план терапии в соответствии с магнитно-резонансным изображением для планирования.
7. Медицинский инструмент по любому из предыдущих пунктов, в котором частота ультразвукового воздействия определяется с использованием модели (1042) ультразвукового моделирования.
8. Медицинский инструмент по п.7, в котором упомянутый медицинский инструмент дополнительно содержит катетер (200, 300, 400, 500, 600, 904), при этом катетер содержит ультразвуковой преобразователь.
9. Медицинский инструмент по п.8, в котором катетер дополнительно содержит:
- стержень (310, 502) с дистальным концом (200, 308, 406, 504) и проксимальным концом (506), при этом дистальный конец содержит первый массив емкостных микромеханических ультразвуковых преобразователей и второй массив емкостных микромеханических ультразвуковых преобразователей; и
- соединитель (512) на проксимальном конце для подачи на первый массив емкостных микромеханических ультразвуковых преобразователей и второй массив емкостных микромеханических ультразвуковых преобразователей электропитания и для управления первой частотой ультразвукового воздействия и второй частотой ультразвукового воздействия.
10. Медицинский инструмент по п.9, в котором первый массив емкостных микромеханических ультразвуковых преобразователей имеет первый регулируемый фокус и второй массив емкостных микромеханических ультразвуковых преобразователей имеет второй регулируемый фокус, при этом первый регулируемый фокус по меньшей мере частично выполнен с возможностью регулирования посредством электронного управления, при этом второй регулируемый фокус по меньшей мере частично выполнен с возможностью регулирования посредством электронного управления и при этом объем ультразвукового воздействия является наложением первого регулируемого фокуса и второго регулируемого фокуса.
11. Медицинский инструмент по п.10, в котором дистальный конец содержит по меньшей мере одну интегральную схему для питания массива емкостных микромеханических ультразвуковых преобразователей и второго массива емкостных микромеханических ультразвуковых преобразователей и для обеспечения электронного управления первым массивом емкостных микромеханических ультразвуковых преобразователей и вторым массивом емкостных микромеханических ультразвуковых преобразователей, и при этом катетер дополнительно содержит шину данных между по меньшей мере одной интегральной схемой и соединителем.
12. Машиночитаемый носитель данных для ультразвукового медицинского инструмента, содержащий машинно-выполняемые команды (930, 933, 934) для выполнения процессором (916), управляющим ультразвуковым медицинским инструментом (900, 1000), при этом ультразвуковой медицинский инструмент содержит систему высокоинтенсивного сфокусированного ультразвука, содержащую ультразвуковой преобразователь (102, 104, 202, 204, 302, 407, 508) с регулируемой частотой ультразвукового воздействия для фокусирования ультразвука в объем ультразвукового воздействия, причем упомянутый ультразвуковой преобразователь содержит первый массив емкостных микромеханических преобразователей (102, 104, 202, 204, 302, 407, 508), и каждый из емкостных микромеханических ультразвуковых преобразователей имеет отдельно управляемую частоту ультразвукового воздействия, причем выполнение команд заставляет процессор:
- принимать (700, 800) план (924) терапии, характеризующий целевую зону (908) внутри субъекта (902);
- определять (702, 802) расстояние (926) прохождения сквозь субъекта до целевой зоны с использованием плана терапии, причем расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя до целевой зоны;
- определять (704, 804) частоту (928) ультразвукового воздействия для каждого из емкостных микромеханических ультразвуковых преобразовательных элементов с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону;
при этом выполнение упомянутых команд заставляет процессор определять частоту ультразвукового воздействия из расстояния прохождения от каждого емкостного микромеханического ультразвукового преобразовательного элемента до целевой зоны и с помощью интегральной схемы управлять частотой ультразвукового воздействия каждого из упомянутых емкостных микромеханических преобразователей, как вычислено из расстояния прохождения упомянутого емкостного микромеханического преобразователя; и
- воздействовать (706, 806) ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука, использующей частоту ультразвукового воздействия.
13. Способ управления ультразвуковым медицинским инструментом, содержащим систему высокоинтенсивного сфокусированного ультразвука, при этом упомянутая система (911) высокоинтенсивного сфокусированного ультразвука содержит ультразвуковой преобразователь (102, 104, 202, 204, 302, 407, 508) с регулируемой частотой ультразвукового воздействия для фокусирования ультразвука в объем ультразвукового воздействия, при этом упомянутый ультразвуковой преобразователь содержит первый массив емкостных микромеханических преобразователей (102, 104, 202, 204, 302, 407, 508), и каждый из емкостных микромеханических ультразвуковых преобразователей имеет отдельно управляемую частоту ультразвукового воздействия, причем упомянутый способ содержит этапы, на которых:
- принимают (700, 800) план (924) терапии, характеризующий целевую зону (908) внутри субъекта (902);
- определяют (702, 802) расстояние (926) прохождения сквозь субъекта до целевой зоны с использованием плана терапии, причем расстояние прохождения характеризует прохождение ультразвука от ультразвукового преобразователя до целевой зоны;
- определяют (704, 804) частоту (928) ультразвукового воздействия для каждого из емкостных микромеханических ультразвуковых преобразовательных элементов с использованием расстояния прохождения для фокусирования объема ультразвукового воздействия на целевую зону;
при этом частоту ультразвукового воздействия вычисляют из расстояния прохождения от каждого емкостного микромеханического ультразвукового преобразовательного элемента до целевой зоны и управляют частотой ультразвукового воздействия каждого из упомянутых емкостных микромеханических преобразователей, как вычислено из расстояния прохождения упомянутого емкостного микромеханического преобразователя; и
- воздействуют (706, 708) ультразвуком на целевую зону с использованием системы высокоинтенсивного сфокусированного ультразвука, использующей частоту ультразвукового воздействия.
| 0 |
|
SU232506A1 | |
| US 2008221448 A1, 11.09.2008 | |||
| WO 2009082740 A1, 02.07.2009 | |||
| US 2011270075 A1, 03.11.2011 | |||
| US 2011213248 A1, 01.09.2011 | |||
| УСТРОЙСТВО ДЛЯ МИНИ-ИНВАЗИВНОЙ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ ОБЪЕКТА ПОСРЕДСТВОМ ТЕПЛОИЗОЛИРОВАННОГО ИЗЛУЧАТЕЛЯ | 2003 |
|
RU2339417C2 |

