ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к терапии высокоинтенсивным сфокусированным ультразвуком под контролем магнитно-резонансной томографии, в частности, изобретение относится к определению смещения ткани высокоинтенсивным сфокусированным ультразвуком с помощью магнитно-резонансной томографии.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
При терапии высокоинтенсивным сфокусированным ультразвуком (HIFU) применяют решетку ультразвуковых преобразовательных элементов для формирования ультразвукового преобразователя. Подача электрической мощности в виде переменного тока в преобразовательные элементы вызывает генерацию ультразвуковых волн данными элементами. Ультразвуковые волны от каждого из преобразовательных элементов складываются либо конструктивно, либо деструктивно в разных положениях на траектории пучка. Посредством управления фазой переменного тока электрической мощности, подаваемой в каждый из преобразовательных элементов, можно управлять фокальной точкой или объемом, в который фокусируется ультразвуковая мощность.
Терапия опухолей высокоинтенсивным сфокусированным ультразвуком (HIFU) требует высокой степени пространственной точности, чтобы исключить повреждение здоровой ткани, а также достигнуть оптимального применения системы. Хотя исключение повреждения здоровой ткани, обусловленного неточным наведением, обычно не составляет проблему в случае крупных стационарных опухолей, при применении пробных соникаций низкой мощности, как принято на практике в настоящее время, технические характеристики и клинический эффект системы могут ухудшаться, если, например, для алгоритма обратной связи применяется неправильная информация о положении. Это трансформируется в снижение эффективности лечения.
Магнитно-резонансную визуализацию силы давления акустического излучения (MR-ARFI) можно применять для наблюдения силы давления излучения, которую продольные механические волны оказывают на ткань in vivo. Упомянутое наблюдение, например, включает в себя оценку силы давления излучения поглощаемого высокоинтенсивного сфокусированного ультразвука.
Журнальная статья «Magnetic resonance acoustic radiation force imaging», McDannold and Maier, Medical Physics, volume 35, August 2008, стр. 3748 по 3758, раскрывает эластографический способ определения смещения, вызываемого сфокусированным ультразвуком, с применением магнитно-резонансной томографии.
Журнальная статья «ARFI-Prepared MRgHIFU in Liver: Simultaneous Mapping of ARFI-Displacement and Temperature elevationn, Using a Fast GRE-EPI Sequence», Auboiroux et. al., Magnetic Resonance in Medicine 68:932-946 (2012), стр. 932 по 946, раскрывает сочетание метода MR-ARFI с МРТ-термометрией на базе сдвига частоты протонного резонанса.
Статья «Ultrasound focusing magnetic resonance acoustic radiation force imaging: Application to ultrasound transcranial therapy», Y. Hertzberg et al., Med.Phys.37(2010)2934, описывает последовательность градиентного эхо для метода MR-ARFI. Данная последовательность содержит градиенты кодирования движения, в которой полярности градиентов (форм сигналов) инвертированы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает медицинское устройство, способ управления медицинским устройством и компьютерный программный продукт в независимых пунктах формулы изобретения. Варианты осуществления приведены в независимых пунктах формулы изобретения.
Как будет очевидно специалисту в данной области техники, аспекты настоящего изобретения можно осуществить в форме устройства, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут принимать форму варианта осуществления целиком в аппаратуре, варианта осуществления целиком в программном обеспечении (в том числе, микропрограммном обеспечении, резидентном программном обеспечении, микрокоде и т.п.) или варианта осуществления, сочетающего аспекты программного и аппаратного обеспечения, которые могут все называться, в общем, в настоящей заявке «схемой», «модулем» или «системой». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, включенного в один или более компьютерно-читаемых носителей, содержащих реализованный на них компьютерно-выполняемый код.
Применять можно любую комбинацию одного или более компьютерно-читаемых носителей. Компьютерно-читаемый носитель может быть компьютерно-читаемым носителем сигналов или компьютерно-читаемым носителем данных. «Компьютерно-читаемый носитель данных» в контексте настоящей заявки включает в себя любой материальный носитель данных, который может хранить команды, которые могут выполняться процессором компьютерного устройства. Компьютерно-читаемый носитель данных может называться компьютерно-читаемым долговременным носителем данных. Компьютерно-читаемый носитель данных может также называться материальным компьютерно-читаемым носителем. В некоторых вариантах осуществления, компьютерно-читаемый носитель данных может быть также способен хранить данные, которые могут выбираться процессором компьютерного устройства. Примеры компьютерно-читаемого носителя данных включают в себя, но без ограничения: гибкий диск, накопитель на жестких магнитных дисках, твердотельный жесткий диск, флэш-память, USB-флэш-накопитель, оперативную память (RAM), постоянную память (ROM), оптический диск, магнитооптический диск и набор регистров процессора. Примеры оптических дисков включают в себя компакт-диски (CD), цифровые универсальные диски (DVD) и диск Blu-Ray (BD), например, диски CD-ROM, CD-RW (перезаписываемый CD), CD-R (записываемый CD), DVD-ROM, DVD-RW, DVD-R, BD-R, or BD-RE (BD многоразовой записи). Термин компьютерно-читаемый носитель данных относится также к носителям записи различных типов, допускающим выборку компьютерным устройством по сети или каналу связи. Например, данные могут выбираться посредством модема, по сети internet или по локальной сети. Компьютерно-выполняемый код, реализованный компьютерно-читаемом носителе, может передаваться с применением любого подходящего носителя, включая, но без ограничения, беспроводную, проводную линию, волоконно-оптический кабель, РЧ-канал и т.п., или любое подходящее сочетание вышеописанных средств.
Компьютерно-читаемый носитель сигналов может включать в себя распространяемый информационный сигнал со встроенным в него компьютерно-выполняемым кодом, например, в основной полосе частот или в виде части несущей волны. Данный распространяемый сигнал может принимать любую из множества различных форм, включая, но без ограничения, электромагнитную, оптическую или любую их подходящую комбинацию. Компьютерно-читаемый носитель сигналов может быть любым компьютерно-читаемым носителем, который не является компьютерно-читаемым носителем данных, и который может передавать, распространять или переносить программу для применения или в связи с применением системой или устройством выполнения команд.
«Компьютерная память» или «память» является примером компьютерно-читаемого носителя данных. Компьютерная память является память, которая непосредственно доступна процессору. «Компьютерное запоминающее устройство» или «запоминающее устройство» является дополнительным примером компьютерно-читаемого носителя данных. Компьютерное запоминающее устройство является любым энергонезависимым компьютерно-читаемым носителем данных. В некоторых вариантах осуществления компьютерное запоминающее устройство может быть также компьютерной памятью или наоборот.
«Процессор» в контексте настоящей заявки включает в себя электронный компонент, который выполнять программу или машинно-выполняемую команду, или компьютерно-выполняемый код. Ссылки на компьютерное устройство, содержащее «процессор», следует интерпретировать как устройство, возможно содержащее по меньшей мере два процессора или процессорных ядра. Процессор может быть, например, многоядерным процессором. Термин процессор может также относиться к совокупности процессоров, находящейся в единственной компьютерной системе или распределенной по нескольким компьютерным системам. Термин компьютерное устройство следует интерпретировать также как возможно относящийся к совокупности или сети компьютерных устройств, содержащий каждое процессор или процессоры. Компьютерно-выполняемый код может выполняться несколькими процессорами, которые могут быть в одном и том же компьютерном устройстве, которые могут быть даже распределены по нескольким компьютерным устройствам.
Компьютерно-выполняемый код может содержать машинно-выполняемые команды или программу, которые(ая) предписывают(ет) процессору выполнять аспект настоящего изобретения. Компьютерно-выполняемый код для выполнения операций аспектов настоящего изобретения может быть записан в любой комбинации одного или более языков программирования, включая объектно-ориентированный язык программирования, например, Java, Smalltalk, C++ и т.п. и обычные процедурные языки программирования, например, язык программирования «C» или подобные языки программирования, и компилирован в машинно-выполняемые команды. В некоторых случаях компьютерно-выполняемый код может быть в форме высокоуровневого языка или в предварительно компилированной форме и может применяться в связи с интерпретатором, который оперативно генерирует машинно-выполняемые команды.
Компьютерно-выполняемый код может выполняться полностью на пользовательском компьютере, частично на пользовательском компьютере, как автономный программный пакет, частично на пользовательском компьютере и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с пользовательским компьютером по сети любого типа, включая локальную сеть (LAN) или широкомасштабную сеть (WAN), или возможно выполнение соединения с внешним компьютером (например, по сети Интернет с помощью провайдера сервисов сети Интернет).
Аспекты настоящего изобретения описаны со ссылкой на блок-схемы последовательностей операций и/или блок-схемы способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. В дальнейшем будет понятно, что каждый этап (блоков) или участок этапов (блоков) блок-схемы последовательности операций, иллюстраций и/или блок-схем может быть реализован командами компьютерной программы в форме компьютерно-выполняемого кода, когда применимо. Кроме того, следует понимать, что, при условии отсутствия взаимного исключения, этапы (блоки) разных блок-схем последовательностей операций, иллюстраций и/или блок-схем можно объединять. Упомянутые команды компьютерной программы могут подаваться в процессор универсального компьютера, специализированного компьютера, или другого программируемого устройства обработки данных, чтобы получать такую машину, чтобы команды, которые выполняются посредством процессора компьютера или другого программируемого устройства обработки данных, создавали средство для реализации функций/операций, заданных этапом (блоком) или этапами (блоками) блок-схемы последовательности операций и/или блок-схемы.
Упомянутые команды компьютерной программы могут также храниться на компьютерно-читаемом носителе, который может давать задание компьютеру, другому программируемому устройству обработки данных или другим устройствам функционировать специальным способом, чтобы команды, хранящиеся на компьютерно-читаемом носителе, создавали изделие, включающее в себя команды, которые реализую функцию/операцию, заданную этапом (блоком) или этапами (блоками) блок-схемы последовательности операций и/или блок-схемы.
Команды компьютерной программы могут также загружаться в компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы предписывать выполнение серии операционных этапов в компьютере, другом программируемом устройстве обработки данных или других устройствах с целью получения такого компьютерно-реализованного процесса, в котором команды, при выполнении компьютером или другим программируемым устройством обработки данных, обеспечивали реализацию функций/операций, заданным этапом (блоком) или этапами (блоками) блок-схемы последовательности операций и/или блок-схемы.
«Пользовательский интерфейс» в контексте настоящей заявки представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Пользовательский интерфейс» может также означать «человеко-машинный интерфейс». Пользовательский интерфейс может представлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может допускать прием входных данных от оператора компьютером и может предоставлять выходные данные пользователю из компьютера. Другими словами, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, и интерфейс может позволять компьютеру показывать результаты операторского управления или манипулирования. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером представления информации оператору. Данные принимаются при посредстве клавиатуры, мыши, трекбола, сенсорной панели, ручки координатного устройства, графического планшета, джойстика, игровой панели, веб-камеры, головной гарнитуры, переключающего рычага, поворотного колеса, педалей, сенсорной перчатки, танцевальной площадки, пульта дистанционного управления и акселерометра, которые являются примерами компонентов пользовательского интерфейса, которые позволяют принимать информацию или данные от оператора.
«Аппаратный интерфейс» в контексте настоящей заявки включает в себя интерфейс, который позволяет процессору компьютерной системы взаимодействовать с внешним компьютерным устройством и/или устройством и/или управлять ими. Аппаратный интерфейс может предоставлять процессору возможность посылать управляющие сигналы или команды во внешнее компьютерное устройство и/или устройство. Аппаратный интерфейс может также допускать, чтобы процессор обменивался данными с внешним компьютерным устройством и/или устройством. Примеры аппаратного интерфейса включают в себя, но без ограничения: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, соединение беспроводной локальной сети, TCP/IP-соединение, Ethernet-соединение, интерфейс управляющего напряжения, интерфейс электромузыкальных инструментов (MIDI-интерфейс), интерфейс аналогового ввода и интерфейс цифрового ввода.
«Дисплей» или «устройство отображения» в контексте настоящей заявки включает в себя устройство вывода или пользовательский интерфейс, предназначенный для отображения изображений или данных. Дисплей может выводить визуальные, аудио и/или тактильные данные. Примеры дисплея включают в себя, но без ограничения: компьютерный монитор, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брайля, электроннолучевую трубку (ЭЛТ), запоминающую электроннолучевую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскопанельный дисплей, вакуумный люминесцентный (ВЛ) дисплей, светодиодные (СД) дисплеи, электролюминесцентный дисплей (ЭЛД), плазменные дисплейные панели (ПДП), жидкокристаллический дисплей (ЖКД), дисплеи на органических светодиодах (ОСД), проектор и нашлемный дисплей.
Данные медицинского изображения определяются в настоящей заявке как дву- или трехмерные данные, которые собраны с помощью сканера для диагностической визуализации. Сканер для диагностической визуализации определяется в настоящей заявке как устройство, предназначенное для сбора информации о физической структуре пациента и построения наборов данных двумерных или трехмерных медицинских изображений. Данные медицинских изображений можно применять для построения визуальных представлений, которые пригодны для диагностики врачом. Данное визуальное представление может выполняться компьютером.
Магнитно-резонансные (МР) данные определяются в настоящей заявке как записанные результаты измерений радиочастотных сигналов, испускаемых атомными спинами, антенной магнитно-резонансного устройства во время сканирования методом магнитно-резонансной томографии. Магнитно-резонансные данные являются примером данных медицинского изображения. Изображение, полученное методом магнитно-резонансной томографии, (МРТ-изображение) определяется в настоящей заявке как реконструированное двух-или трехмерное визуальное представление анатомических данных, содержащихся в данных магнитно-резонансной томографии. Данное визуальное представление может формироваться с помощью компьютера.
Магнитно-резонансные данные могут содержать результаты измерения радиочастотных сигналов, испускаемых атомными спинами, антенной магнитно-резонансного устройства во время сканирования методом магнитно-резонансной томографии, которые содержат информацию, которую можно применять для магнитно-резонансной термометрии. Магнитно-резонансная термометрия действует путем измерения изменений температурно-чувствительных параметров. Примерами параметров, которые можно измерять в процессе магнитно-резонансной термометрии, являются сдвиг частоты протонного резонанса, коэффициент диффузии или изменение времени T1 и/или T2 релаксации, и их можно использовать для измерения температуры с применением магнитного резонанса. Сдвиг частоты протонного резонанса зависит от температуры, так как магнитное поле, которое действует на отдельные протоны, атомы водорода, зависит от окружающей молекулярной структуры. Повышение температуры ослабляет экранирование молекул вследствие влияния температуры на водородные связи. Это приводит к зависимости частоты протонного резонанса от температуры.
Плотность протонов линейно зависит от равновесной намагниченности. Поэтому температурные изменения можно определять с применением взвешенных изображений плотности фотонов.
Времена T1, T2 и T2 со звездочкой (иногда записываемое как T2*) релаксации также зависят от температуры. Поэтому реконструкцию изображений, взвешенных по T1, T2 и T2 со звездочкой, можно применять для построения тепловых или температурных карт.
Температура влияет также на броуновское движение молекул в водном растворе. Поэтому импульсные последовательности, которые способны измерять коэффициенты диффузии, например, импульсную последовательность спинового эхо с диффузионным градиентом, можно применять для измерения температуры.
Один из наиболее полезных способов измерения температуры с применением магнитного резонанса состоит в измерении сдвига резонансной частоты протонов (PRF) для протонов воды. Резонансная частота протонов зависит от температуры. По мере того, как температура изменяется в вокселе, сдвиг частоты будет вызывать изменение измеряемой фазы протонов воды. Затем можно определить изменение температуры между двумя фазовыми изображениями. Данный способ определения температуры дает преимущество относительно быстрого сравнения с другими способами.
«Ультразвуковое окно» в контексте настоящей заявки включает в себя окно, которое является фактически прозрачным для ультразвуковых(ой) волн или энергии. Обычно, в качестве ультразвукового окна применяют тонкую пленку или мембрану. Ультразвуковое окно может быть, например, изготовлено из тонкой мембраны из BoPET (двухосно-ориентированного полиэтилентерефталата).
В одном аспекте изобретение предлагает медицинское устройство, содержащее систему высокоинтенсивного сфокусированного ультразвука для соникации области соникации. Медицинское устройство дополнительно содержит систему магнитно-резонансной томографии для сбора магнитно-резонансных данных из зоны визуализации. Можно считать, что магнитно-резонансные данные должны собираться с разделением на первые магнитно-резонансные данные и вторые магнитно-резонансные данные. Область соникации и зона визуализации по меньшей мере частично совмещаются. В некоторых примерах область соникации может целиком находиться внутри зоны визуализации. В других примерах по меньшей мере часть области соникации находится снаружи зоны визуализации. В зависимости от применения, область соникации имеет разные объем или размеры. В некоторых примерах область соникации будет просто включать в себя точку, в которую фокусируется высокоинтенсивный сфокусированный ультразвук. В других примерах область соникации может включать в себя ближнее поле или даже дальнее поле ультразвуковых волн. Медицинское устройство дополнительно содержит процессор для управления медицинским устройством.
Медицинское устройство дополнительно содержит память для хранения машинно-выполняемых команд. Память дополнительно хранит команды импульсной последовательности для управления системой магнитно-резонансной томографии, чтобы собирать магнитно-резонансные данные в соответствии с протоколом визуализации силы давления акустического излучения. Команды импульсной последовательности в контексте настоящей заявки содержат команды, которые характеризуют или могут служить для непосредственного управления системой магнитно-резонансной томографии, чтобы собирать магнитно-резонансные данные. Обычно, протоколы для магнитно-резонансной томографии определяются в форме так называемой импульсной последовательности. Импульсная последовательность является временной диаграммой, которая представляет операции, которые различные компоненты системы магнитно-резонансной томографии выполняют в различное время. Команды импульсной последовательности могут также включать в себя концепцию временной диаграммы, например, импульсную последовательность, которую можно легко преобразовать в команды для управления системой магнитно-резонансной томографии.
Память дополнительно хранит первые команды соникации и вторые команды соникации. Как первые команды соникации, так и вторые команды соникации являются командами, которые применяются для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на область соникации в соответствии с протоколом визуализации силы давления акустического излучения. То есть команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение градиентов кодирования движения таким образом, что можно применять протокол визуализации силы давления акустического излучения. Команды импульсной последовательности задают сбор магнитно-резонансных данных в течение нескольких повторений импульсной последовательности. Команды импульсной последовательности устанавливают для каждого из нескольких повторений последовательности первую группу градиентов кодирования движения и вторую группу градиентов кодирования движения. В течение протокола визуализации силы давления акустического излучения градиенты кодирования движения подаются, когда осуществляется соникация области соникации, и когда соникация отсутствует. Данные из данных двух наборов сравниваются, и сравнение применяется для определения движения, вызванного подачей ультразвука.
Выполнение машинно-выполняемых команд предписывает процессору собирать первые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука первыми командами соникации. Первые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение первой группы градиентов кодирования движения. Выполнение машинно-выполняемых команд дополнительно предписывает процессору собирать вторые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука вторыми командами соникации.
Вторые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение второй группы градиентов кодирования движения. При применении обычных протоколов визуализации силы давления акустического излучения, современные протоколы применяют импульсы соникации в один и тот же момент в течение протокола, и градиенты кодирования движения изменяются. В данном примере импульсные последовательности, применяемые для сбора как первых магнитно-резонансных данных, так и вторых магнитно-резонансных данных являются идентичными. Вместо изменения импульсной последовательности для управления системой магнитно-резонансной томографии, соникация происходит в разные моменты в течение идентичных импульсных последовательностей.
Выполнение машинно-выполняемых команд дополнительно предписывает процессору реконструировать первое изображение с кодированием движения из первых магнитно-резонансных данных. Выполнение машинно-выполняемых команд дополнительно предписывает процессору реконструировать второе изображение с кодированием движения из вторых магнитно-резонансных данных. Выполнение машинно-выполняемых команд дополнительно предписывает процессору построить карту смещений по разности между первым изображением с кодированием движения и вторым изображением с кодированием движения.
Приведенный пример может обладать преимуществом в том, что импульсная последовательность, выполняемая системой магнитно-резонансной томографии, является каждый раз идентичной. Изменение импульсной последовательности может привести к множеству различных проблем. Например, переключение полярности градиентов кодирования движения в течение каждого динамического интервала может быть источником нескольких артефактов в изображении, например, от вихревых токов и нарушения установившегося состояния магнитно-резонансного изображения. В результате, применение приведенного примера может давать более качественные изображения сил давления акустического излучения. Создаваемая карта смещений может иметь меньше артефактов. В контексте настоящей заявки термин динамический интервал относится к участку повторения импульсной последовательности.
В другом варианте осуществления выполнение машинно-выполняемых команд предписывает процессору построить магнитно-резонансное изображение из первых и/или вторых магнитно-резонансных данных. В некоторых примерах карта смещений или даже тепловая карта может быть наложена на магнитно-резонансное изображение.
В другом варианте осуществления команды импульсной последовательности кодируют смещение в первом направлении в течение первой группы градиентов кодирования движения. Команды импульсной последовательности кодируют смещение во втором направлении в течение второй группы градиентов кодирования движения. Первое направление противоположно второму направлению.
В другом варианте осуществления протокол визуализации силы давления акустического излучения является протоколом визуализации силы давления акустического излучения с применением градиентного эхо.
В другом варианте осуществления команды импульсной последовательности устанавливают, что первая группа градиентов кодирования движения имеет первую полярность, и вторая группа градиентов кодирования движения имеет вторую полярность. Первая полярность и вторая полярность являются противоположными.
В другом варианте осуществления выполнение машинно-выполняемых команд дополнительно предписывает процессору вычислять тепловую карту с применением первых магнитно-резонансных данных и вторых магнитно-резонансных данных в соответствии со способом сдвига частоты протонного резонанса. Создание тепловой карты может быть целесообразно потому, что точную тепловую карту можно сравнить с уточненной картой смещений.
В другом варианте осуществления протокол визуализации силы давления акустического излучения является протоколом визуализации силы давления акустического излучения с применением спинового эхо.
В другом варианте осуществления команды импульсной последовательности устанавливают, что первая группа градиентов кодирования движения имеет первую полярность, и вторая группа градиентов кодирования движения имеет первую полярность. Полярность относится к направлению магнитного поля, создаваемого градиентами, или полярность может также относиться к току, который подается для градиентов кодирования движения. Другими словами, это определяет, что первая группа градиентов кодирования движения и вторая группа градиентов кодирования движения имеет магнитные поля или ток, который подается с той же полярностью. Для каждой отдельной группы градиентов кодирования движения форма сигнала градиентов кодирования движения может быть многополярной группой лепестков градиентов, при этом каждый лепесток градиента имеет ориентацию градиента, и форма сигнала градиентного импульса кодирования движения имеет диаграмму полярности, образованную несколькими лепестками градиентов. Конкретным примером является биполярная форма сигнала двух лепестков градиентов противоположных (отдельных) ориентаций градиентов. Данные ориентации градиентов многополярных градиентов кодирования движения составляют полярность формы сигнала градиентов кодирования движения, сформированного его лепестками градиентов в целом.
В другом варианте осуществления протокол визуализации силы давления акустического излучения является протоколом визуализации силы давления акустического излучения с применением спинового эхо со статическими униполярными В другом варианте осуществления команды импульсной последовательности устанавливают, что первая группа градиентов кодирования движения разделяется на первую часть и вторую часть. Команды импульсной последовательности устанавливают, что вторая группа градиентов кодирования движения разделяется на третью часть и четвертую часть. Команды импульсной последовательности устанавливают, что первая часть и вторая часть имеют противоположные полярности. Команды импульсной последовательности устанавливают, что третья часть и четвертая часть имеют противоположные полярности. Команды импульсной последовательности устанавливают, что первая часть и четвертая часть имеют идентичные полярности. И вновь, полярность градиентов кодирования движения может определяться в зависимости от направления создаваемого поля или в зависимости от тока, подаваемого в катушки. Существует возможность, что первая часть имеет место до второй части. Аналогично, существует также возможность, что четвертая часть имеет место до третьей части.
При ссылке на первую группу градиентов кодирования движения и вторую группу градиентов кодирования движения возможно, чтобы вторая группа градиентов кодирования движения имела место по времени до первой группы градиентов кодирования движения. Определение градиентов в виде групп или частей не подразумевает определенного порядка.
В другом варианте осуществления протокол визуализации силы давления акустического излучения является протоколом визуализации силы давления акустического излучения с применением спинового эхо со статическими биполярными градиентами.
В другом варианте осуществления команды импульсной последовательности устанавливают предварительно заданную паузу градиентов кодирования движения между первой частью и третьей частью. Команды импульсной последовательности устанавливают предварительно заданную паузу градиентов кодирования движения между второй частью и четвертой частью. Упомянутая предварительно заданная пауза может быть полезной потому, что смещение, вызываемое ультразвуком в субъекте, не увеличивается и не уменьшается снова мгновенно. Существует время нарастания и время, которое требуется для затухания ультразвукового смещения. Наличие предварительно заданной паузы между первой частью и третьей частью, а также между второй частью и четвертой частью допускает, что затухание ультразвука происходит так, что соникация не происходила в течение ошибочного градиента кодирования движения.
В другом варианте осуществления предварительно заданная пауза составляет от 1 мс до 20 мс.
В другом варианте осуществления предварительно заданная пауза составляет от 2 мс до 4 мс.
В другом варианте осуществления предварительно заданная пауза составляет от 3 мс до 5 мс.
В другом варианте осуществления предварительно заданная пауза составляет от 4 мс до 6 мс.
Предварительно заданная пауза, приблизительно равная 4 мс, может быть полезна потому, что постоянная времени экспоненциального затухания ультразвука, обычно, приблизительно равна 5 мс. Пауза по меньшей мере 1 мс может быть полезна в некоторых случаях, и ее можно также увеличить до момента, когда градиенты кодирования движения достигают градиента считывания данных визуализации. При обычной практике может быть особенно полезна предварительно заданная пауза, приблизительно, от 1 мс до 20 мс.
В другом варианте осуществления команды импульсной последовательности устанавливают предварительно заданную задержку градиентов кодирования движения между первой группой градиентов кодирования движения и второй группой градиентов кодирования движения. Предварительно заданная задержка может быть полезна из-за ранее упомянутого времени нарастания и постоянной времени экспоненциального затухания ультразвука в субъекте. Наличие предварительно заданной задержки может ослаблять эффекты неправильного кодирования энергии соникации в ошибочную группу градиентов кодирования движения.
Как и в вышеприведенном описании, предварительно заданная пауза от 1 мс до 20 мс может быть также полезна в качестве предварительно заданной задержки.
В другом варианте осуществления предварительно заданная задержка составляет от 1 мс до 20 мс.
В другом варианте осуществления предварительно заданная задержка составляет от 2 мс до 4 мс.
В другом варианте осуществления предварительно заданная задержка составляет от 3 мс до 5 мс.
В другом варианте осуществления предварительно заданная задержка составляет от 4 мс до 6 мс.
В другом варианте осуществления происходит одно из следующего: первая часть имеет место до второй части, и вторая часть имеет место до первой части.
В другом варианте осуществления выполнение машинно-выполняемых команд предписывает процессору выполнять что-то одно из следующего: собирать первые магнитно-резонансные данные и вторые магнитно-резонансные данные последовательно, и собирать первые магнитно-резонансные данные и вторые магнитно-резонансные данные посредством чередования сбора строк k-пространства.
В другом варианте осуществления выполнение машинно-выполняемых команд дополнительно предписывает процессору принимать диаграмму соникации. Выполнение машинно-выполняемых команд дополнительно предписывает процессору модифицировать диаграмму соникации с применением карты смещений. Это может быть полезно потому, что уточненную карту смещений можно применять для модификации диаграммы соникации, чтобы точнее воздействовать ультразвуком на субъекта. В некоторых примерах выполнение машинно-выполняемых команд может также управлять системой высокоинтенсивного сфокусированного ультразвука для выполнения соникации после модификации плана соникации. Во время выполнения соникации субъекта, различные этапы процессоров или способов, описанных в настоящей заявке, можно применять многократно. Например, во время соникации свойства или упругие свойства ткани субъекта могут изменяться. Поэтому, может потребоваться многократно выполнять весь процесс построения карты смещений, чтобы точно настроить диаграмму соникации по мере того, как соникация выполняется.
В другом аспекте изобретение предлагает способ управления медицинским устройством. Медицинское устройство содержит систему высокоинтенсивного сфокусированного ультразвука для воздействия ультразвуком на область соникации. Медицинское устройство дополнительно содержит систему магнитно-резонансной томографии для сбора магнитно-резонансных данных из зоны визуализации. Область соникации и зона визуализации по меньшей мере частично совмещаются. Способ содержит этап сбора первых магнитно-резонансных данных посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука первыми командами соникации.
Команды импульсной последовательности управляют системой магнитно-резонансной томографии, чтобы собирать магнитно-резонансные данные в соответствии с протоколом визуализации силы давления акустического излучения. Импульсная последовательность задает сбор магнитно-резонансных данных из нескольких повторений импульсной последовательности. Команды импульсной последовательности устанавливают для каждого из нескольких повторений последовательности первую группу градиентов кодирования движения и вторую группу градиентов кодирования движения. Первые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение первой группы градиентов кодирования движения в соответствии с протоколом визуализации силы давления акустического излучения.
Способ дополнительно содержит сбор магнитно-резонансных данных посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука вторыми командами соникации. Вторые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение второй группы градиентов кодирования движения в соответствии с протоколом визуализации силы давления акустического излучения. Способ дополнительно содержит этап реконструкции первого изображения с кодированием движения из первых магнитно-резонансных данных. Способ дополнительно содержит этап реконструкции второго изображения с кодированием движения из вторых магнитно-резонансных данных. Способ дополнительно содержит построение карты смещений по разности между первым изображением с кодированием движения и вторым изображением с кодированием движения.
В другом аспекте изобретение предлагает компьютерный программный продукт для выполнения процессором, управляющим медицинским устройством. Медицинское устройство содержит систему высокоинтенсивного сфокусированного ультразвука для воздействия ультразвуком на область соникации. Медицинское устройство дополнительно содержит систему магнитно-резонансной томографии для сбора магнитно-резонансных данных из зоны визуализации. Область соникации и зона визуализации по меньшей мере частично совмещаются. Выполнение машинно-выполняемых команд предписывает процессору собирать первые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука первыми командами соникации. Команды импульсной последовательности предписывают системе магнитно-резонансной томографии собирать магнитно-резонансные данные в соответствии с протоколом визуализации силы давления акустического излучения. Импульсная последовательность задает сбор магнитно-резонансных данных в течение нескольких повторений импульсной последовательности. Команды импульсной последовательности устанавливают для каждого из нескольких повторений последовательности первую группу градиентов кодирования движения и вторую группу градиентов кодирования движения.
Первые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение первой группы градиентов кодирования движения в соответствии с протоколом визуализации силы давления акустического излучения. Выполнение машинно-выполняемых команд дополнительно предписывает процессору собирать вторые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука вторыми командами соникации. Вторые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение второй группы градиентов кодирования движения в соответствии с протоколом визуализации силы давления акустического излучения. Выполнение машинно-выполняемых команд дополнительно предписывает процессору реконструировать первое изображение с кодированием движения из первых магнитно-резонансных данных. Выполнение машинно-выполняемых команд дополнительно предписывает процессору реконструировать второе изображение с кодированием движения из вторых магнитно-резонансных данных. Выполнение машинно-выполняемых команд дополнительно предписывает процессору построить карту смещений по разности между первым изображением с кодированием движения и вторым изображением с кодированием движения.
Следует понимать, что один или более из вышеприведенных вариантов осуществления изобретения можно объединять, при условии, что объединяемые варианты осуществления не являются взаимно исключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем будут описаны предпочтительные варианты осуществления изобретения, но только для примера, со ссылкой на чертежи, на которых:
Фиг. 1 - изображение примерного медицинского устройства;
Фиг. 2 - увеличенное изображение участка на фиг. 1;
Фиг. 3 - блок-схема последовательности операций, которая иллюстрирует способ управления медицинским устройством, показанным на фиг. 1;
Фиг. 4 - временная диаграмма, которая иллюстрирует последовательность градиентного эхо для магнитно-резонансной визуализации силы давления акустического излучения (ARFI);
Фиг. 5 - дополнительный пример временной диаграммы, которая иллюстрирует последовательность спинового эхо для магнитно-резонансной ARFI;
Фиг. 6 - дополнительный пример временной диаграммы, которая иллюстрирует последовательность для магнитно-резонансной ARFI с применением спинового эхо со статическими биполярными градиентами;
Фиг. 7 - магнитно-резонансное магнитудное изображение, которое получено, когда градиенты для ARFI (ARFI-градиенты) не прилагались;
Фиг. 8 - магнитно-резонансное изображение, которое получено со статическими ARFI-градиентами;
Фиг. 9 - магнитно-резонансное изображение, которое получено при применении ARFI-градиентов, при этом сами градиенты переключаются внутри импульсной последовательности;
Фиг. 10 - представление разности по магнитуде между нечетными и четными динамическими интервалами для фиг. 9 в направлении среза;
Фиг. 11 - представление разности по магнитуде между нечетными и четными динамическими интервалами для фиг. 8 в направлении среза;
Фиг. 12 - представление разности по магнитуде между нечетными и четными динамическими интервалами для фиг. 9 в направлении фазового кодирования;
Фиг. 13 - представление разности по магнитуде между нечетными и четными динамическими интервалами для фиг. 8 в направлении фазового кодирования;
Фиг. 14 - представление разности по магнитуде между нечетными и четными динамическими интервалами для фиг. 9 в направлении частотного кодирования;
Фиг. 15 - представление разности по магнитуде между нечетными и четными динамическими интервалами для фиг. 8 в направлении частотного кодирования;
Фиг. 16 - представление разности фаз между нечетными и четными динамическими интервалами для фиг. 9 в направлении среза;
Фиг. 17 - представление разности фаз между нечетными и четными динамическими интервалами для фиг. 8 в направлении среза;
Фиг. 18 - представление разности фаз между нечетными и четными динамическими интервалами для фиг. 9 в направлении фазового кодирования;
Фиг. 19 - представление разности фаз между нечетными и четными динамическими интервалами для фиг. 8 в направлении фазового кодирования;
Фиг. 20 - представление разности фаз между нечетными и четными динамическими интервалами для фиг. 9 в направлении частотного кодирования;
Фиг. 21 - представление разности фаз между нечетными и четными динамическими интервалами для фиг. 8 в направлении частотного кодирования;
Фиг. 22 - представление среднеквадратического отклонения разности между изображениями в случае и в отсутствие ARFI с применением переменных и статических ARFI-градиентов;
Фиг. 23 - представление средней разности между четными и нечетными динамическими интервалами, при применении переменных или статических градиентов;
Фиг. 24 - графические изображения карт смещений и температурных карт;
Фиг. 25 - представление максимального смещения центрального вокселя мишени в зависимости от времени как для переменных градиентов, так и для статических градиентов; и
Фиг. 26 - представление максимальной температуры центрального вокселя мишени в зависимости от времени как для переменных градиентов, так и для статических градиентов.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Элементы с похожими числовыми позициями на приведенных фигурах либо являются эквивалентными элементами, либо выполняют одинаковую функцию. Элементы, которые были описаны раньше, не обязательно будут описаны в связи с последующими фигурами, если их функции эквивалентны.
Фиг. 1 и 2 представляют медицинское устройство 100 в соответствии с вариантом осуществления изобретения. Фиг. 2 является увеличенным видом участка на фиг. 1. Медицинское устройство 100 содержит систему 102 магнитно-резонансной томографии. Система магнитно-резонансной томографии содержит магнит 104. Магнит 104 является сверхпроводящим магнитом цилиндрического типа с туннелем 106, проходящим через центр магнита. Магнит содержит криостат, охлаждаемый жидким гелием, со сверхпроводящими катушками. Кроме того, можно также применить постоянный или резистивный электромагниты. Возможно также применение магнитов разных типов, например, можно также применить разъемный цилиндрический магнит и, так называемый, открытый магнит. Разъемный цилиндрический магнит подобен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две секции, чтобы обеспечивать возможность доступа к изоплоскости магнита, данные магниты можно применять, например, в связи с терапией пучком заряженных частиц. Открытый магнит содержит две секции магнита, одну над другой, с пространством между ними, которое является достаточно большим, чтобы вместить субъекта: компоновка двух секций подобна компоновке катушки Гельмгольца. Открытые магниты широко применяются потому, что субъект менее ограничен. Внутри криостата цилиндрического магнита находится группа сверхпроводящих катушек. Внутри туннеля 106 цилиндрического магнита находится зона визуализации 108, в которой магнитное поле является достаточно сильным и однородным для выполнения магнитно-резонансной томографии.
Внутри туннеля 106 магнита находится также набор градиентных магнитных катушек 110, которые применяются при сборе магнитно-резонансных данных, чтобы пространственно кодировать магнитные спины внутри зоны визуализации 108 магнита 104. Градиентные магнитные катушки соединены с источником 112 питания градиентных магнитных катушек. Предполагается, что градиентные магнитные катушки 110 являются репрезентативными. Градиентные магнитные катушки обычно содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник 112 питания градиентных магнитных катушек подает ток в градиентные магнитные катушки 110. Ток, подаваемый в магнитные катушки, является управляемым в зависимости от времени и может быть пилообразным или импульсным.
Вблизи зоны 108 визуализации находится радиочастотная катушка 114 для манипуляции ориентацией магнитных спинов в пределах зоны 108 визуализации и для приема радиосигналов, распространяющихся от спинов также в пределах зоны 108 визуализации. Радиочастотная катушка может содержать несколько катушечных элементов. Радиочастотная катушка может также называться каналом или антенной. Радиочастотная катушка 114 соединена с радиочастотным приемопередатчиком 116. Радиочастотная катушка 114 и радиочастотный приемопередатчик 116 могут быть заменены раздельными передающей и приемной катушками и раздельными передатчиком и приемником. Следует понимать, что радиочастотная катушка 114 и радиочастотный приемопередатчик 116 являются репрезентативными. Предполагается, что радиочастотная катушка 114 представляет также специальную передающую антенну и специальную приемную антенну. Аналогично, приемопередатчик 116 может также представлять раздельные передатчик и приемники.
Субъект 118 показан лежащим на опоре 120 для субъекта и расположен частично внутри зоны 108 визуализации. Медицинское устройство 100 содержит также систему 122 высокоинтенсивного сфокусированного ультразвука. Система высокоинтенсивного сфокусированного ультразвука содержит заполненную жидкостью камеру 124. Внутри заполненной жидкостью камеры 124 находится ультразвуковой преобразователь 126. Хотя, на данной фигуре не показано, ультразвуковой преобразователь 126 может содержать несколько ультразвуковых преобразовательных элементов, способных, каждый, формировать отдельный пучок ультразвукового излучения. Данное построение можно применять для электронного управления местоположением точки 138 соникации посредством управления фазой и/или амплитудой переменного электрического тока, подаваемого в каждый из ультразвуковых преобразовательных элементов. Точка 138 представляет регулируемый фокус медицинского устройства 100.
Ультразвуковой преобразователь 126 соединен с механизмом 128, который допускает механическое изменение положения ультразвукового преобразователя 126. Механизм 128 соединен с механическим приводом 130, который предназначен для приведения в действие механизма 128. Механический привод 130 представляет также источник питания для подачи электрической мощности в ультразвуковой преобразователь 126. В некоторых вариантах осуществления источник питания может управлять фазой и/или амплитудой электрической мощности, подаваемой в отдельные ультразвуковые преобразовательные элементы. В некоторых вариантах осуществления механический привод/источник 130 питания расположен снаружи туннеля 106 магнита 104.
Ультразвуковой преобразователь 126 генерирует ультразвуковое излучение, которое, как показано, распространяется по траектории 132. Траектория ультразвукового излучения 132 проходит через наполненную жидкостью камеру 124 и сквозь ультразвуковое окно 134. В данном варианте осуществления ультразвуковое излучение проходит затем сквозь гелевую подушку 136. Гелевая подушка 136 не обязательно представлена во всех вариантах осуществления, но в данном варианте осуществления, в опоре 120 для субъекта имеется углубление для вмещения гелевой подушки 136. Гелевая подушка 136 способствует проходу ультразвуковой энергии между преобразователем 126 и субъектом 118. После прохождения сквозь гелевую подушку 136, траектория ультразвукового излучения 132 проходит сквозь субъект 118 и фокусируется в точке 138 соникации или зоне мишени. Стрелка 140 указывает ось пучка. Когда ультразвук подается в зону мишени, субъект будет испытывать действие силы в направлении по стрелке 140. Область 139 соникации обозначена рамкой. Как показано, рамка охватывает зону 138 мишени и участок оси 140 пучка.
Точку 138 соникации можно перемещать комбинированным методом механического позиционирования ультразвукового преобразователя 126 и электронного управления положением точки 138 соникации, чтобы воздействовать на весь объем зоны 138 мишени.
Источник 112 питания градиентных магнитных катушек, приемопередатчик 116 и механический привод/источник 130 питания системы 122 высокоинтенсивного сфокусированного ультразвука показаны в состоянии соединения с аппаратным интерфейсом 144 компьютера 142. Компьютер 142 дополнительно содержит процессор 146, пользовательский интерфейс 148, компьютерное запоминающее устройство 150 и компьютерную память 152. Аппаратный интерфейс 144 дает возможность процессору 146 посылать и принимать команды и данные, чтобы управлять функционированием медицинского устройства 100. Процессор 146 дополнительно соединен с пользовательским интерфейсом 148, компьютерным запоминающим устройством 150 и компьютерной памятью 152.
Как показано, компьютерное запоминающее устройство 150 содержит команды 260 импульсной последовательности. Показано также, что компьютерное запоминающее устройство 150 содержит первые команды 262 соникации. Команды 260 импульсной последовательности могут применяться медицинским устройством 100 для управления системой 102 магнитно-резонансной томографии, чтобы собирать магнитно-резонансные данные. Дополнительно показано, что компьютерное запоминающее устройство 150 содержит вторые команды 264 соникации. Дополнительно показано, что компьютерное запоминающее устройство 150 содержит первые магнитно-резонансные данные 266 и вторые магнитно-резонансные данные 268, которые были собраны с помощью системы 102 магнитно-резонансной томографии, управляемой командами 260 импульсной последовательности. Первые команды 262 соникации применялись с командами 260 импульсной последовательности во время сбора первых магнитно-резонансных данных 266. Вторые команды 264 соникации применялись с командами 260 импульсной последовательности для сбора вторых магнитно-резонансных данных 268.
Дополнительно показано, что компьютерное запоминающее устройство 150 содержит первое изображение 270 с кодированием движения, которое реконструировано из первых магнитно-резонансных данных 266. Дополнительно показано, что компьютерное запоминающее устройство 150 содержит второе изображение 272 с кодированием движения, которое реконструировано из вторых магнитно-резонансных данных 268. Дополнительно показано, что компьютерное запоминающее устройство 150 содержит карту 274 смещений, которая построена посредством вычитания первого изображения 270 с кодированием движения из второго изображения 272 с кодированием движения. Дополнительно показано, что компьютерное запоминающее устройство содержит необязательную температурную карту 276, которая реконструирована из первых магнитно-резонансных данных 266 и/или вторых магнитно-резонансных данных 268. Дополнительно показано, что компьютерное запоминающее устройство содержит диаграмму 278 соникации. Точку 138 соникации можно перемещать либо механическим, либо электронным методом во множество различных местоположений соникации, чтобы формировать диаграмму 278 соникации.
Как показано, компьютерная память 152 содержит модуль 280 управления. Модуль 280 управления содержит код, который дает возможность процессору 146 управлять работой и функционированием медицинского устройства 100. Например, модуль 280 управления может содержать код, который дает возможность процессору 146 применять команды 260 импульсной последовательности и/или первые команды 262 соникации или вторые команды 264 соникации. Дополнительно показано, что компьютерная память 152 содержит модуль 282 реконструкции изображения сил давления акустического излучения, который можно применять для построения первого изображения 270 с кодированием движения 270, второго изображения 272 с кодированием движения и карту 274 смещений. Компьютерная память 152 может дополнительно содержать, при желании, модуль 284 реконструкции магнитно-резонансной термометрии, который допускает построение температурной карты 276 из первых магнитно-резонансных данных 266 и/или вторых магнитно-резонансных данных 268. Дополнительно показано, что компьютерная память 152 содержит необязательный модуль 286 модификации диаграммы соникации. Модуль 286 модификации диаграммы соникации может модифицировать диаграмму 278 соникации, чтобы учитывать карту 274 смещений и/или, при желании, температурную карту 276.
Фиг. 3 поставляет блок-схему последовательности операций, которая поясняет примерный способ управления медицинского устройства 100, показанного на фиг. 1 и 2. Сначала, на этапе 300 система 102 магнитно-резонансной томографии управляется командами 260 импульсной последовательности, чтобы собрать первые магнитно-резонансные данные 266. В то же время процессор 146 управляет системой 122 высокоинтенсивного сфокусированного ультразвука посредством первых команд 262 соникации. Первые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение первой группы градиентов кодирования движения. Затем, на этапе 302 команды 260 импульсной последовательности применяются для управления системой 102 магнитно-резонансной томографии, чтобы собрать вторые магнитно-резонансные данные 268. В то же время система 122 высокоинтенсивного сфокусированного ультразвука управляется вторыми командами 264 соникации. Вторые команды 264 соникации предписывают системе 122 высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область 139 соникации в течение второй группы градиентов кодирования движения. На этапе 304, из первых магнитно-резонансных данных 266 реконструируется первое изображение 270 с кодированием движения. На этапе 306, из вторых магнитно-резонансных данных 268 реконструируется второе изображение 272 с кодированием движения. И наконец, на этапе 308 реконструируется карта 274 смещений по разности между первым изображением 270 с кодированием движения и вторым изображением 272 с кодированием движения.
Фиг. 4 представляет временную диаграмму 400, которая иллюстрирует последовательность градиентного эхо для магнитно-резонансной ARFI. Линия 402 показывает, когда подается ультразвук. Линия 404 показывает полярность градиентов, которая может быть направлением тока или формируемого магнитного поля. Линия 416 показывает, когда генерируются РЧ импульсы для градиентного эхо. Линия 418 показывает направление кодирования движения конкретного градиента. Градиенты 404 кодирования движения разделяются на первую группу 406 и вторую группу 408. Ультразвуковое смещение характеризуется нарастанием 410 и спадом 412. Между первой группой 406 и второй группой 408 существует предварительно заданная задержка 408, чтобы ультразвуковое смещение имело время для достаточного нарастания или затухания, чтобы допускать выполнение способа. Можно видеть, что в данном случае имеет место первое повторение импульсной последовательности, посредством которого собираются первые магнитно-резонансные данные 266, и второе повторение импульсной последовательности, посредством которого собираются вторые магнитно-резонансные данные 268. В приведенном примере можно видеть, что между двумя повторениями импульсной последовательности выполняется соникация в период времени, отличающийся от остальной импульсной последовательности.
Фиг. 5 представляет дополнительный пример временной диаграммы. В приведенном примере временная диаграмма представляет, как следует выполнять последовательность спинового эхо для магнитно-резонансной ARFI. В приведенном примере имеется статический униполярный градиент, но момент включения ультразвука перемещается, как было показано на фиг. 4. В приведенном примере полярность градиентов всегда одна и та же, однако, направление кодирования движения изменяется на противоположное, как на временной диаграмме, показанной на фиг. 4.
Фиг. 6 представляет дополнительный пример временной диаграммы 600, которая иллюстрирует последовательность для магнитно-резонансной ARFI с применением спинового эхо со статическими биполярными градиентами. В приведенном примере первая группа градиентов 406 дополнительно разделяется на первую часть 602 и вторую часть 604. Вторая группа градиентов 408 разделяется на третью часть 606 и четвертую часть 608. По существу, сонификация выполняется дважды в течение каждого повторения импульсной последовательности. Между первой группой 406 и второй группой 408 по-прежнему имеется предварительно заданная пауза 409, но между первой частью 602 и четвертой частью 608 также имеется дополнительно предварительно заданная пауза 610.
На фиг. 4, 5 и 6 представлены только градиенты кодирования движения, другие градиенты, связанные с пространственным кодированием МР изображений, не показаны.
Чтобы повысить точность воздействий высокоинтенсивным сфокусированным ультразвуком (HIFU), магнитно-резонансная визуализация силы давления акустического излучения (MR-ARFI) обеспечивает высокоточное определение фокальной точки и коррекцию вносимых тканью искажений. Метод MR-ARFI основан на синхронизации ультразвуковых импульсов с магнитно-резонансными градиентами кодирования движения, чтобы производить изменения фазового сигнала. Для выделения изменения фазового сигнала, вызываемого ультразвуковыми импульсами, отрицательные и положительные фазовые изменения собирают посредством переключения полярности градиентов с каждым динамическим интервалом. Альтернативное решение, предложенное для повышения качества MR-ARFI, состоит в изменении задержки включения ультразвуковых импульсов на каждом динамическом интервале. С каждым динамическим интервалом, например, представленном первой и второй группами градиентов кодирования движения, соникация осуществляется с разной задержкой включения. Соникации осуществляются, например, в форме ультразвуковых импульсов, и в течение соответствующих динамических интервалов временная привязка ультразвукового импульса к градиенту кодирования движения в течение его динамического интервала отличается. Временная привязка ультразвукового импульса к первому градиенту кодирования движения отличается от временной привязки ультразвукового импульса к второму градиенту кодирования движения. Таким образом, в течение разных динамических интервалов, ультразвуковые импульсы совпадают с каждыми лепестками градиентов разных полярностей для импульсов градиентов кодирования движения разных полярностей.
Терапию высокоинтенсивным сфокусированным ультразвуком под контролем магнитно-резонансной томографии (MR-HIFU) в установленном порядке применяется в ряде случаев клинической практики. Однако, на такие лечебные воздействия сильно влияет неоднородность ткани, дефокусирующая пучок и сдвигающая местоположение нагрева. Магнитно-резонансная визуализация силы давления акустического излучения (MR-ARFI) позволяет количественно оценивать микрометрическое смещение, вызываемое ультразвуковыми импульсами, которые пропорциональны локальной интенсивности звука. Знание распределения интенсивности звука позволяет измерять аберрацию, вызванную неоднородностями ткани и, следовательно, оптимизировать эффективность нагревания в местоположении мишени.
Метод MR-ARFI основан на количественном определении смещения ткани, вызванного ультразвуковыми импульсами, синхронизированными с градиентами кодирования движения в магнитно-резонансной томографии. Фазовый сдвиг ϕ, измеренный методом MR-ARFI, можно вычислять интегрированием амплитуды G(t) градиента, умноженной на смещение x(t):
Знание зависимости прилагаемых амплитуд градиентов от времени и измеренных локальных изменений фазы позволяет вычислять распределение средних смещений в течение прилагаемых градиентов кодирования движения. Однако, измеренное изменение фазы также может быть вызвано артефактами, созданными градиентами кодирования движения, а также колебаниями температуры, вызываемыми ультразвуковыми импульсами. В течение последовательности градиентного эхо полярность градиентов кодирования движения систематически инвертируется с каждым динамическим интервалом, чтобы вызывать противоположные изменения ϕ+ и ϕ- фазы между четными и нечетными динамическими интервалами. При желании, ультразвуковой импульс может начинаться незадолго перед градиентом кодирования движения, чтобы увеличить среднее смещение. По той же причине, между положительными и отрицательными градиентами каждого динамического интервала может также вводиться временная задержка.
Для подавления пространственной вариации фазы, обусловленной неоднородностью и дрейфом магнитного поля B0, получают карты смещений по разности фаз двух последовательных динамических интервалов (ϕ+-ϕ-)/2. Кроме того, одновременно можно вычислять тепловые карты по среднему значению двух последовательных динамических интервалов (ϕ+-ϕ-)/2, как описано в ссылках. Такой же метод переключения полярности градиентов между четными и нечетными динамическими интервалами применяется также с последовательностью спинового эхо, включающей в себя либо униполярные градиенты, либо биполярные градиенты.
Переключение полярности градиентов кодирования движения с каждым динамическим интервалом является источником нескольких артефактов в изображении, например, от вихревых токов и нарушения установившегося состояния магнитно-резонансного изображения. Поскольку данные артефакты изменяются с каждым динамическим интервалом, их можно ошибочно интерпретировать как смещение ткани. Артефакты, вызванные переключением градиентов кодирования движения, обычно подавляют вычитанием видимого смещения, измеренного до подачи ультразвуковых импульсов. Первые динамические интервалы применяют для создания упомянутой опорной карты смещений на основании (ϕ0+-ϕ0-)/2. Данный метод привязки вносит дополнительный шум в карты измеренных смещений (до 40% снижения отношения сигнала к шуму (SNR)) и делает картирование смещений очень чувствительным к общему движению пациента, и при этом опорная карта смещений не совмещается с последними картами смещений.
Переключение полярности градиентов кодирования движения сказывается не только на фазовых изображениях, но также на магнитудных изображениях. Данное магнитудное изображение, обычно применяемое для анатомического совмещения, засоряется, тем самым, нежелательными скачками контраста, изменяющимися с каждым динамическим интервалом. Для устранения второстепенной части данного артефакта на анатомических фоновых изображениях можно применять усреднение по времени, но, в таком случае, контроль движения пациента значительно задерживается и теряет четкость.
Вместо переключения полярности градиента кодирования движения с каждым динамическим интервалом, предлагаемый способ заключается в изменении задержки включения ультразвукового импульса с каждым динамическим интервалом. Последовательности для MR-ARFI (градиентное эхо или спиновое эхо) систематически составляются из двух симметричных серий положительных и отрицательных градиентов кодирования движения (повторения униполярных или биполярных градиентов). В то время, как одна серия градиентов синхронизируется с ультразвуковыми импульсами для наведения изменения фазы, определяющего величину смещения, другая серия градиентов применяется для обращения предыдущей серии градиентов, чтобы обеспечить нулевой момент. Обеспечение нулевого момента градиента кодирования движения важно для исключения нежелательного сдвига изображения в целом в k-пространстве.
Стабильность МР изображения предлагается сохранять путем систематического применения одинаковых градиентов кодирования движения в течение всех динамических интервалов. В данном случае задержку включения можно устанавливать различно для четных и нечетных динамических интервалов, чтобы подавать ультразвуковые импульсы в течение положительных или отрицательных частей градиентов кодирования движения для четных и нечетных динамических интервалов, соответственно. Данный способ обеспечивает также количественное определение противоположных изменений ϕ+ и ϕ- фазы между четными и нечетными динамическими интервалами, допускающих одновременное количественное определение температуры и смещения при отсутствии артефактов, связанных с поочередно изменяемыми градиентами кодирования движения.
Для иллюстрации данного способа, на фиг. 4 представлен пример ультразвуковых импульсов, совмещенных с положительным вторым градиентом в течение четных динамических интервалов и отрицательным первым градиентом в течение нечетного динамического интервала, при сохранении одинаковых градиентов кодирования движения в течение всех динамических интервалов.
Данный способ предлагает основное преимущество сохранения устойчивого состояния при кодировании МР изображении, но имеет недостаток в том, что, когда импульс соникации подается в течение первого градиента кодирования движения, остается некоторое смещение в течение второго градиента кодирования движения.
Чтобы показать важность устойчивого состояния на МР изображении, данные с описанными последовательностями с поочередно изменяемыми градиентами и показанными на фиг. 4 (со статическими градиентами) собирали без подачи каких-либо ультразвуковых импульсов. Длительность градиентов устанавливали равной 4 мс, с напряженностью 30,2 мТл/с, временем нарастания 0,155 мс и интервалом 2 мс между обоими градиентами. Для сравнения, данные собирались также без каких-либо градиентов кодирования движения для ARFI. Другие параметры сбора данных соответствуют стандартной последовательности для тепловой карты с временем эхо 20 мс.
В контексте настоящей заявки выражение статический градиент относится к применению одинаковой импульсной последовательности в течение обоих динамических интервалов. В данном случае, импульсные последовательности являются идентичными, но ультразвуковое излучение изменяется. Когда упоминаются поочередно изменяемые или переменные градиенты, это относится к соответствующему уровню техники, когда ультразвуковые импульсы в течение каждого динамического интервала остаются одинаковыми, но градиенты изменяются на противоположные в импульсной последовательности для управления системой магнитно-резонансной томографии.
На фиг. 7 показано магнитно-резонансное магнитудное изображение, которое получено, когда ARFI-градиенты не прилагались.
На фиг. 8 показано магнитно-резонансное изображение, которое получено со статическими ARFI-градиентами, как описано в настоящей заявке.
На фиг. 9 показано магнитно-резонансное изображение, которое получено по современной технологии, при применении известных ARFI-градиентов, когда сами градиенты переключаются внутри импульсной последовательности. Из сравнения фиг. 8 и 9 можно видеть, что в изображении по современной технологии присутствует намного больше артефактов. Это демонстрирует, что выгодно применять одинаковые команды импульсной последовательности, но при этом изменять момент времени подачи ультразвука.
Фиг. 7, 8 и 9 представляют магнитудные изображения, полученные с применением высококачественного вспомогательного фантома. В отсутствие каких-либо MR-ARFI-градиентов, магнитуда сигнала внутри упомянутого цилиндрического фантома является достаточно однородной (фиг. 7). Однако, применение переменных ARFI-градиентов радикально сказывается на однородности данного сигнала (фиг. 9). Применение статических ARFI-градиентов устраняет, по большей части, искажение изображения, вызываемое переменными ARFI-градиентами (фиг. 8).
На фиг. 10-15 показана разность по магнитуде при приложении и без приложения ARFI-градиентов, с применением переменных или статических градиентов для изображений на фиг. 9 и 8. Фиг. 10, 12 и 14 соответствуют фиг. 9. Фиг. 11, 13 и 15 соответствуют фиг. 8. Фиг. 10, 12 и 14 соответствуют, так называемым, переменным градиентам, то есть когда в рамках импульсной последовательности градиент переключается между первым динамическим интервалом 1004 и вторым динамическим интервалом 1006. На фиг. 11, 13 и 15 градиенты совсем не изменяются, а вместо этого изменяется местоположение соникации. На каждой из фигур отмечены данные для первого динамического интервала 1004 и второго динамического интервала 1006. Ось x представляет положение 1000. Ось y представляет относительное изменение 1002 магнитуды. Фиг. 10 и 11 представляют случай с градиентами кодирования движения, ориентированными по направлению кодирования среза. Фиг. 12 и 13 представляют случай с градиентами кодирования движения, ориентированными по направлению фазового кодирования. Фиг. 14 и 15 представляют случай с градиентами кодирования движения, ориентированными по направлению частотного кодирования. Из данных фигур можно видеть, что применение так называемых статических градиентов приводит к уменьшению числа артефактов в изображении.
Фиг. 10-15 обеспечивают подробный анализ артефакта, вызываемого переменными ARFI-градиентами в распределении магнитуд вдоль направления фазового кодирования изображения, которое соответствует вертикальной оси на фиг. 7, 8 и 9. Для упомянутого анализа собрали данные по 50 динамическим интервалам, с применением либо переменных, либо статических ARFI-градиентов и с применением градиентов кодирования движения, ориентированных в направлении кодирования среза или фазового, или частотного кодирования изображения. Четные и нечетные срезы усредняли по отдельности по 25 динамическим интервалам, каждый для исключения большей части белого шума при измерении. Данный пространственный профиль распределения интенсивности для магнитуды нормировали по сигналу магнитуды, собранному в отсутствие ARFI-градиентов. В результате представлено практически только изменение интенсивности сигнала, вызванное применением ARFI-градиентов. На фиг. 10-15 показано, что изменения интенсивности, производимые переменными ARFI-градиентами, могут достигать 20%, когда градиент кодирования движения ориентирован в направлениях кодирования среза и фазового кодирования изображения, но остаются намного меньшими в случае статических градиентов. Сигнал магнитуды сильно различается между четными и нечетными динамическими интервалами, при применении переменных ARFI-градиентов (почти противоположные пространственные вариации для направлений частотного и фазового кодирования изображения). Как и предполагалось, статические ARFI-градиенты не показывают никакой существенной разницы сигналов между четными и нечетными динамическими интервалами, поскольку во всех упомянутых интервалах данные собираются одинаковым образом.
Фиг. 16-21 аналогичны фиг. 10-15, за исключением того, что на фиг. 16-21 сравниваются разности фаз между изображениями на фиг. 8 и 9. Фиг. 17, 19 и 21 соответствуют фиг. 8, и фиг. 16, 18 и 20 соответствуют фиг. 9. На фиг. 17, 19 и 21 отображено изменение фазы при, так называемых, статических градиентах, и на фиг. 16, 18 и 20 показано изменение фазы для переменных градиентов. На каждой фигуре ось x 1000 соответствует положению, и разность фаз 1600 показана в градусах. На каждом графике представлены первый динамический интервал 1004 и второй динамический интервал 1006. На фиг. 16 показано изменение относительно направления среза для переменных градиентов. На фиг. 17 представлен случай градиентов кодирования движения, ориентированных вдоль направления среза, для статических градиентов. На фиг. 18 представлен случай градиентов кодирования движения, ориентированных вдоль направления фазового кодирования для переменных градиентов. На фиг. 19 представлен случай градиентов кодирования движения, ориентированных вдоль направления фазового кодирования для статических градиентов. На фиг. 20 представлен случай градиентов кодирования движения, ориентированных вдоль направления частотного кодирования для переменных градиентов, и на фиг. 21 представлен случай градиентов кодирования движения, ориентированных вдоль направления частотного кодирования для статических градиентов.
Аналогичное сравнение для фазового изображения представлено на фиг. 16-21, на которых усредненное фазовое изображение для четных и нечетных динамических интервалов вычитается из опорной средней фазы, полученной без ARFI-градиентов. Вследствие дрейфа B0 и разного шиммирования, имеющего место при каждом сборе данных, дополнительная полиномиальная функция подбиралась и вычиталась из каждого фазового изображения, усредненного по всем динамическим интервалам. Подобно наблюдению, выполненному для магнитудного изображения, переменные ARFI-градиенты вызывают значительное изменение распределения фазы. Данная вариация фазы значительно различается для четных и нечетных динамических интервалов.
Фиг. 22 представляет среднеквадратическое отклонение разности между изображениями в случае и в отсутствие ARFI с применением переменных 2200 и статических 2202 ARFI-градиентов.
Для более подробной количественной оценки амплитуды артефакта, вызванного ARFI-градиентами, на фиг. 22 показано среднеквадратического отклонения нормированного изменения магнитуды и фазы для изображений, собранных с переменными или статическими ARFI-градиентами, с градиентами кодирования движения вдоль каждого направления. При применении статического градиента, артефакт ослабляется на магнитудном изображении в 4,24±1,15 раз и на фазовом изображении в 1,99±1,46 раз.
Фиг. 23 представляет среднюю разность между четными и нечетными динамическими интервалами, при использовании переменных 2200 или статических 2202 градиентов.
Среднее значение абсолютной разности между четными и нечетными динамическими интервалами представлено на фиг. 23. При применении статического ARFI градиента изменение между четными и нечетными динамическими интервалами уменьшается на магнитудном изображении в 7,66±3,98 раз и на фазовом изображении в 24,36±13,1 раз. Фактически, данный результат зависит, главным образом, от установочных параметров эксперимента, например, числа применяемых динамических интервалов, так как между двумя последовательными динамическими интервалами со статическими ARFI-градиентами не предполагается наблюдать какую-либо другую разность, кроме белого шума.
Применение статических градиентов устраняет большинство артефактов, наблюдаемых на магнитудном и фазовом изображении, наблюдаемом с переменными градиентами. Кроме того, статические градиенты обеспечивают точное согласование фонового магнитудного и фазового изображения между четными и нечетными динамическими интервалами. Такая стабильность изображений облегчает обработку изображений при ARFI и повышает робастность и точность картирования смещений потому, что не требуется опорной карты смещений. Применение опорных карт ограничивает множество клинических применений, например, существует причина, по которой общепринятый способ теплового картирования по PRF все же не годится для абдоминальных органов, и исследователь все еще ведут поиск альтернативных решений.
Фиг. 24 представлены графические изображения карт 2400 смещений и температурных карт 2402. Карты 2400 смещений находятся в одном ряду, и температурные карты 2402 находятся в другом ряду. Первый столбец 2404 представляет карту 2400 смещений и температурную карту 2402 при применении переменных градиентов. Средний столбец, обозначенный позицией 2406, представляет карту 2400 смещений и температурную карту 2402, когда применены переменные градиенты с опорным смещением. Правый столбец 2408 представляет карту 2400 смещений и температурную карту 2402, когда применены статические градиенты. Все фигуры получены с подачей 100-Ваттной мощности переменного тока. Видно, что в крайнем правом столбце 2408 присутствует меньше артефактов. Применение статических градиентов не только повышает качество карты смещений, но также повышает качество температурного картирования.
Фиг. 24 представляет карты смещений и тепловые карты с переменными градиентами (слева), переменными градиентами с опорным смещением (в центре) и статическими градиентами (справа), при подаче мощности 100 Вт переменного тока.
Фиг. 24 представляется карты смещений и тепловые карты в упомянутом фантоме, полученные с 4-мс ультразвуковыми импульсами 100 Вт переменного тока, при применении переменных градиентов, переменных градиентов с опорными картами смещений и статическими градиентами. Тепловые карты аналогичны для трех данных способов. Однако, на картах смещений переменными градиентами создаются артефакты пульсаций. Большинство таких артефактов пульсаций можно устранить посредством применения опорной карты смещений, но за счет 41% дополнительного шума, вносимого упомянутой опорной картой (не говоря о чувствительности к движению субъекта в целом, отсутствующему в примере с упомянутым фантомом). Статический градиент обеспечивает карты смещений с более высоким SNR, но с меньшей амплитудой и отрицательным смешением относительно фокальной точки. Данное отличие обусловлено тем, что ультразвуковой импульс, подаваемый в течение первых градиентов, не затухает полностью через 2 мс до вторых градиентов с противоположным знаком. Поскольку смещение ткани расширяется с течением времени вследствие эффекта сдвиговых волн, распределение смещений, вычитаемое в течение второго градиента больше, чем в течение первого градиента.
Фиг. 25 представляет максимальное смещение 2500 в зависимости от времени 2502. Данное смещение показано для переменных градиентов 2200 и статических градиентов 2202.
Фиг. 26 представляет максимальную температуру 2600 в зависимости от времени 2502. Данная температура также показана переменных градиентов 2200 и статических градиентов 2202.
Фиг. 25 и 26 показывают временные вариации смещения и температуры в центральном вокселе мишени. И те и другие аналогичны, за исключением того, что смещение и температура занижены при применении статических градиентов, частично вследствие остающегося смещения при затухании в течение вторых градиентов, но также вследствие артефакта пульсаций в местоположении центрального вокселя.
Амплитуду разностей между температурами и смещениями со статическим и переменным градиентом можно определять количественно из информации о смещении ткани с течением времени. Смещение ткани описано в литературе как экспоненциальное нарастание и экспоненциальное затухание, характеризуемые сходящимися постоянными времени τrise=3,2 мс и τdecay=5,5 мс для мышечной ткани в живом организме. В случае ранее проверенной последовательности, это будет приводить к теоретическому занижению смещения на 20% и падению температуры на 0,6°C, что аналогично значениям, наблюдаемым на фиг. 25 и 26.
Если свойства ткани известны, то положение задержки включения можно точно настроить для компенсации с учетом ранее описанного теплового смещения.
Ультразвуковой импульс можно настроить для совмещения на такую же величину с лепестком первого градиента кодирования движения для нечетных динамических интервалов, на которую он совмещается со вторыми градиентами кодирования движения в течение нечетных динамических интервалов.
Однако, чтобы минимизировать занижение температуры, а также смещения (включая отрицательные смещения относительно фокальной точки), наиболее эффективный способ состоит в простом увеличении промежутка времени между первым и вторым градиентами кодирования движения.
Применение одинаковых градиентов кодирования движения для всех динамических интервалов с разной задержкой включения ультразвука для четных и нечетных динамических интервалов применимо также к последовательности спинового эхо с униполярными градиентами (фиг. 5) и биполярными градиентами (фиг. 6). Применение последовательности спинового эхо с униполярными градиентами кодирования движения обеспечивает преимущество длительного промежутка времени между первым и вторым градиентами благодаря присутствию 180° РЧ импульса, который полностью исключает занижение смещения и температуры при применении статических ARFI-градиентов.
Применение настоящего изобретения можно быстро определить при проверке однородности и стабильности магнитуды фоновых изображений. Без применения настоящего изобретения фоновая магнитуда при MR-ARFI засоряется артефактами с разными картинами для четных и нечетных динамических интервалов, колеблющимися с каждым динамическим интервалом. Применение настоящего изобретения может быть также обнаружено в опубликованной статье, если описано, что опорная карта смещений не применяется, или если SNR измеренного смещения выше ожидаемого для известной последовательности. Предполагается, что настоящий способ будет систематически применяться для визуализации подвижных органов, без стробирования сигналов жизнедеятельности.
Хотя настоящее изобретение подробно представлено на чертежах и охарактеризовано в вышеприведенном описании, упомянутые чертежи и описание следует считать наглядными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
После изучения чертежей, описания и прилагаемой формулы изобретения, специалистами в данной области техники в процессе практической реализации заявленного изобретения могут быть разработаны и выполнены другие модификации предложенных вариантов осуществления. В формуле изобретения, формулировка «содержащий» не исключает других элементов или этапов, и признак единственного числа (в виде неопределенного артикля в оригинале) не исключает множественного числа. Единственный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые признаки упомянуты во взаимно различающихся зависимых пунктах формулы изобретения, не означает невозможность применения комбинации упомянутых признаков в подходящем случае. Компьютерная программа может храниться/распространяться на подходящем носителе, например, оптическом носителе данных или полупроводниковом носителе, поставляемом совместно с другими аппаратным обеспечением или в его составе, но может также распространяться в других формах, например, по сети Интернет или в других проводных или беспроводных телекоммуникационных системах. Никакие позиции в формуле изобретения нельзя считать ограничивающими объем изобретения.
СПИСОК ПОЗИЦИЙ
100 медицинское устройство
102 система магнитно-резонансной томографии
104 магнит
106 туннель магнита
108 зона визуализации
110 градиентные магнитные катушки
112 источник питания градиентных магнитных катушек
114 радиочастотная катушка
116 приемопередатчик
118 субъект
120 опора для субъекта
122 система высокоинтенсивного сфокусированного ультразвука
124 заполненная жидкостью камера
126 ультразвуковой преобразователь
128 механизм
130 механический привод/источник питания
132 траектория ультразвука
134 ультразвуковое окно
136 гелевая подушка
138 точка соникации или зона мишени
139 область соникации
140 ось пучка
142 компьютер
144 аппаратный интерфейс
146 процессор
148 пользовательский интерфейс
150 компьютерное запоминающее устройство
152 компьютерная память
260 команды импульсной последовательности
262 первые команды соникации
264 вторые команды соникации
266 первые магнитно-резонансные данные
268 вторые магнитно-резонансные данные
270 первое изображение с кодированием движения
272 второе изображение с кодированием движения
274 карта смещений
276 температурная карта
278 диаграмма соникации
280 модуль управления
282 модуль реконструкции изображения сил давления акустического излучения
284 модуль реконструкции магнитно-резонансной термометрии
286 модуль модификации диаграммы соникации
300 собрать первые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука первыми командами соникации
302 собрать вторые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука вторыми командами соникации
304 реконструировать первое изображение с кодированием движения из первых магнитно-резонансных данных
306 реконструировать второе изображение с кодированием движения из вторых магнитно-резонансных данных
308 построить карту смещений по разности между первым изображением с кодированием движения и вторым изображением с кодированием движения
400 временная диаграмма
402 ультразвуковое излучение
404 полярность градиента
406 первая группа
408 вторая группа
409 предварительно заданная задержка
410 нарастание уровня соникации
412 спад уровня соникации
414 период соникации
416 радиочастотный импульс
418 направление кодирования движения
500 временная диаграмма
600 временная диаграмма
602 первая часть
604 вторая часть
606 третья часть
608 четвертая часть
610 предварительно заданная пауза
1000 положение
1002 относительное изменение магнитуды (процентное изменение)
1004 первый динамический интервал (нечетный динамический интервал)
1006 второй динамический интервал (четный динамический интервал)
1600 изменение фазы (в градусах)
2200 переменные градиенты
2202 статические градиенты
2400 смещение
2402 температура
2404 переменные градиенты
2406 переменные градиенты с опорным смещением
2408 статические градиенты
2500 смещение
2502 время
2600 температура
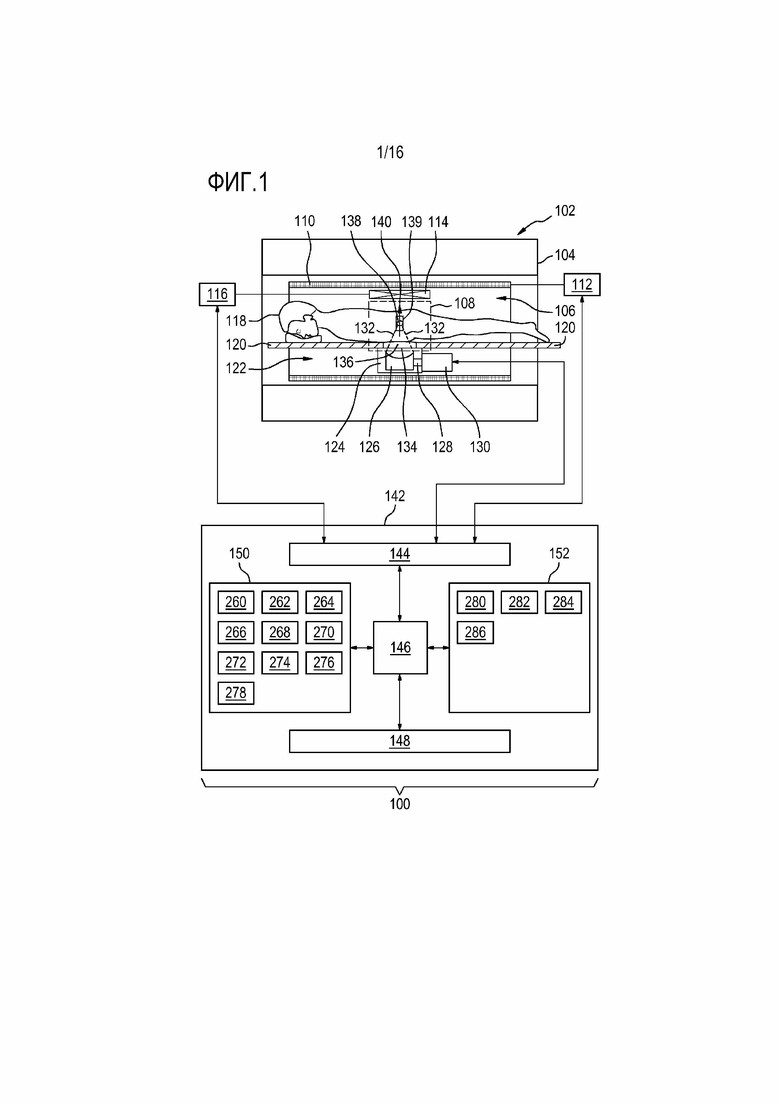
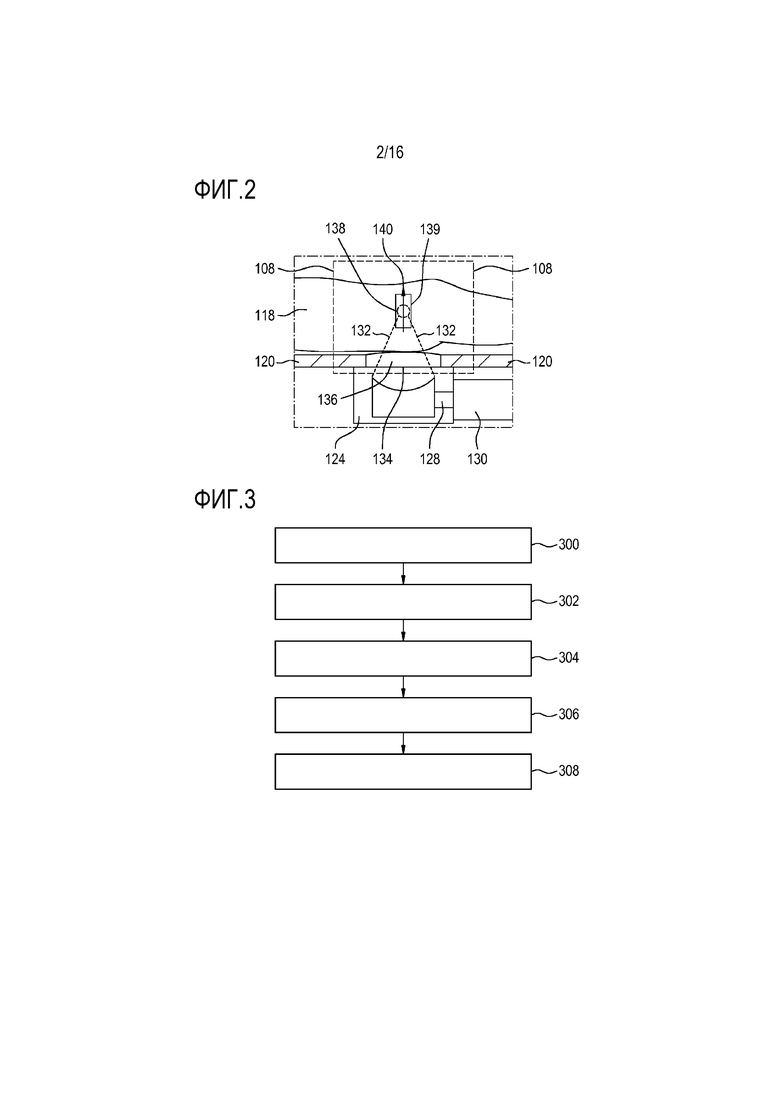
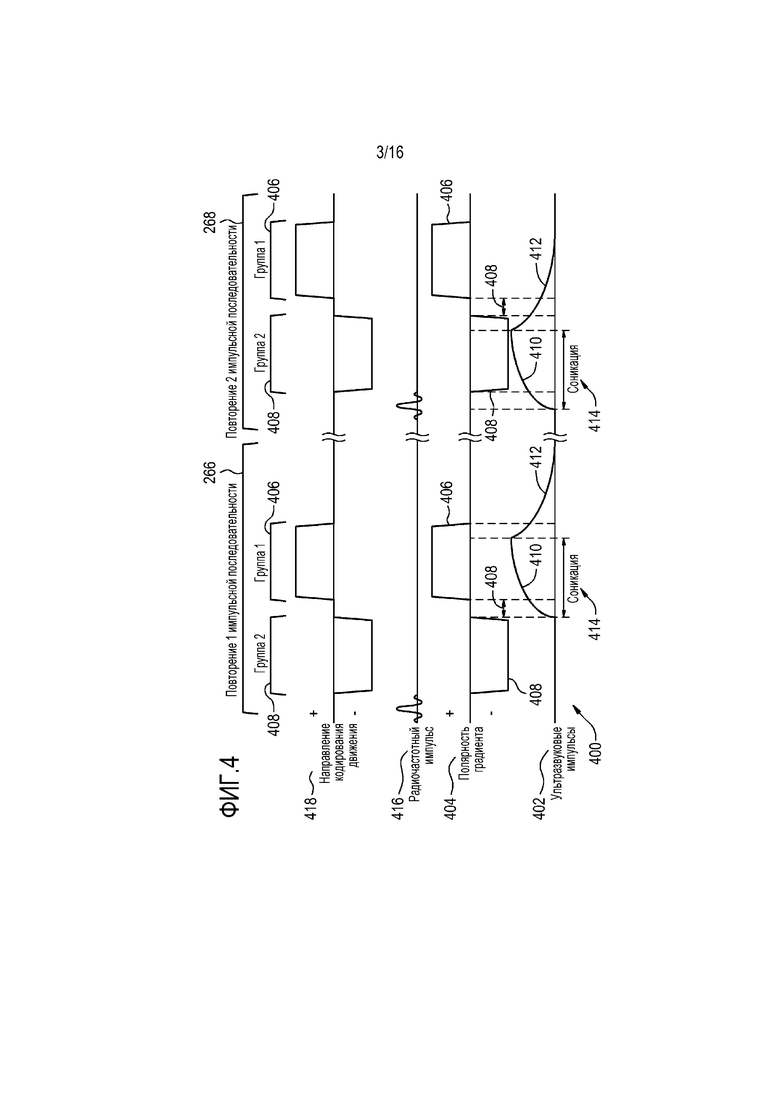
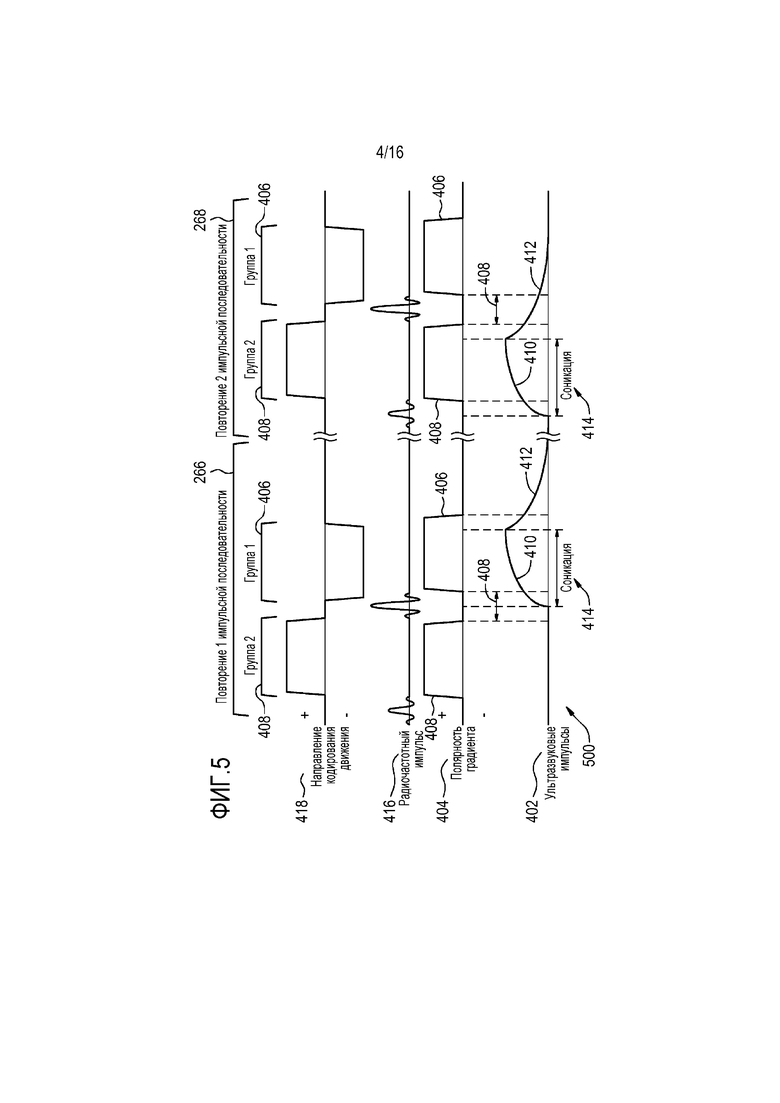
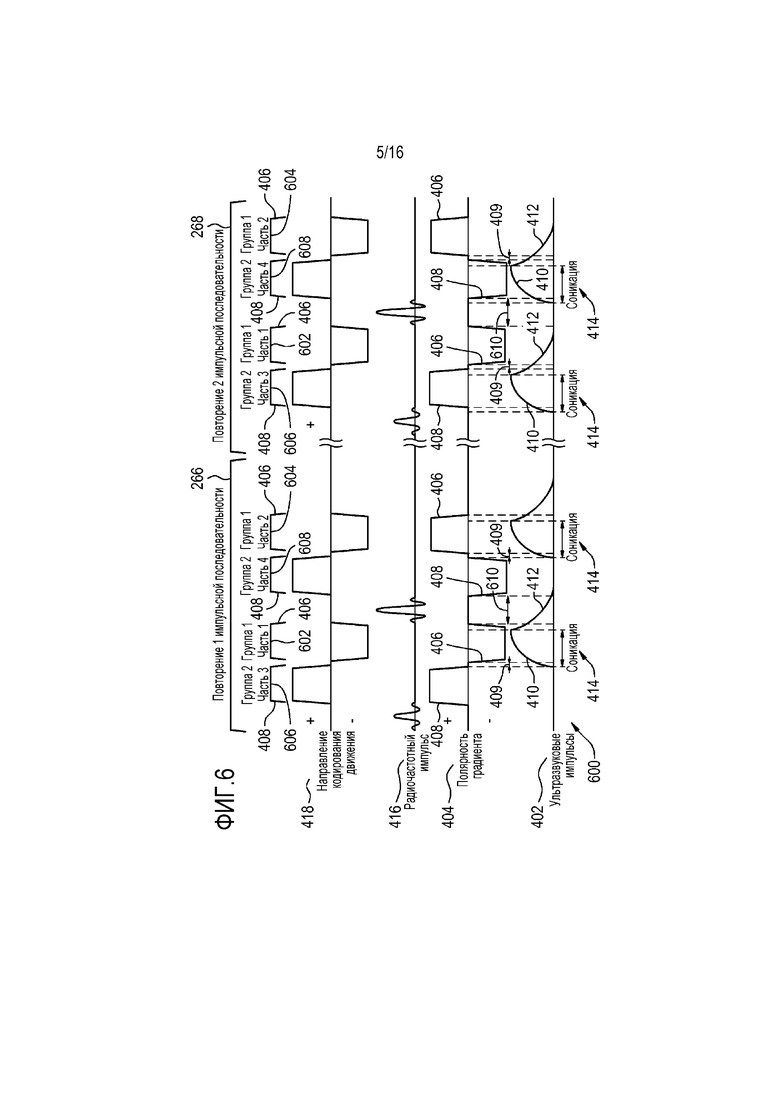
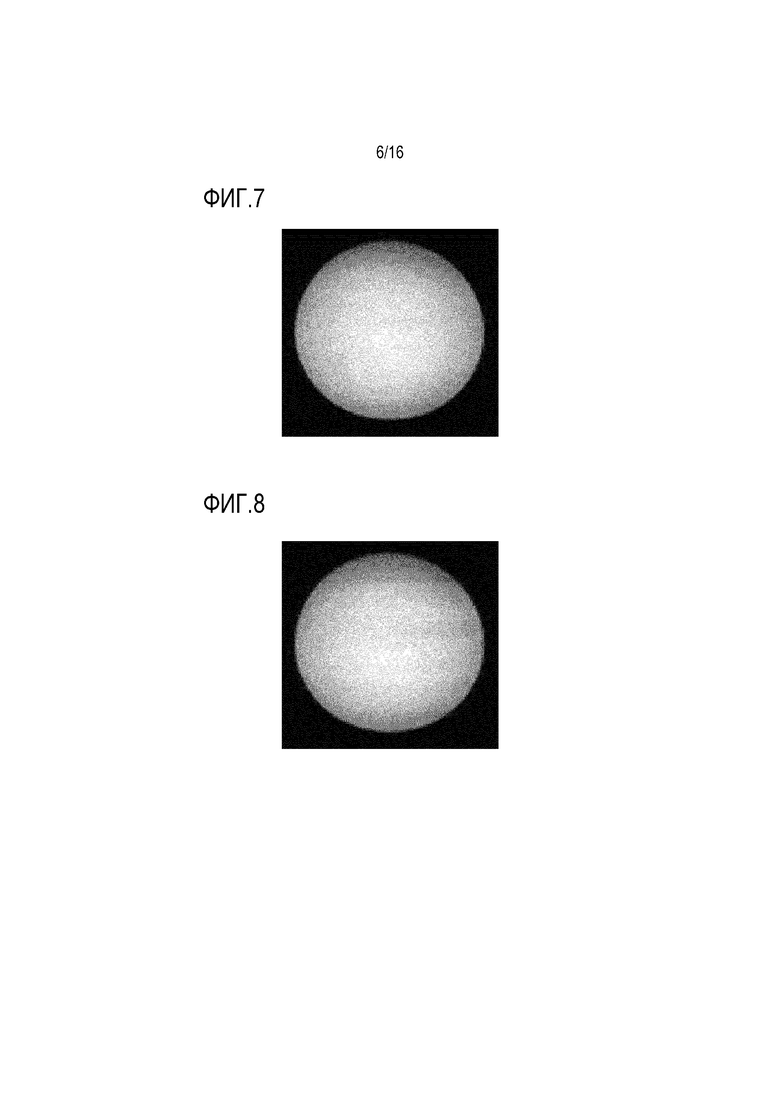
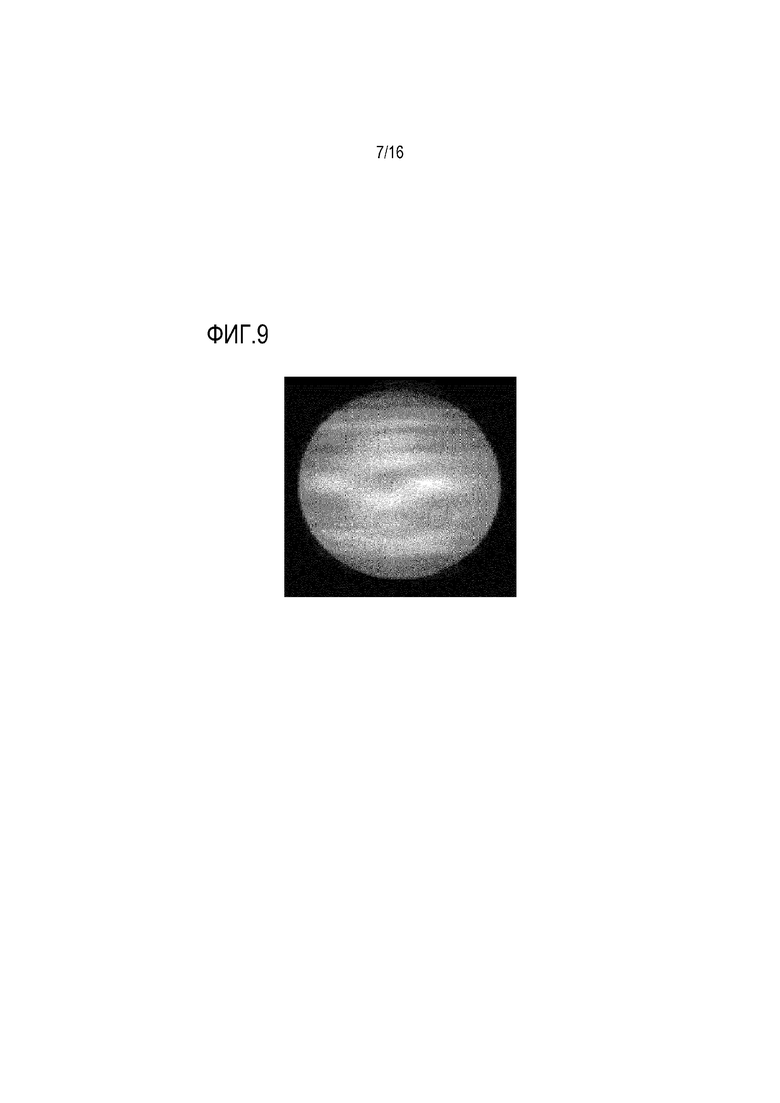
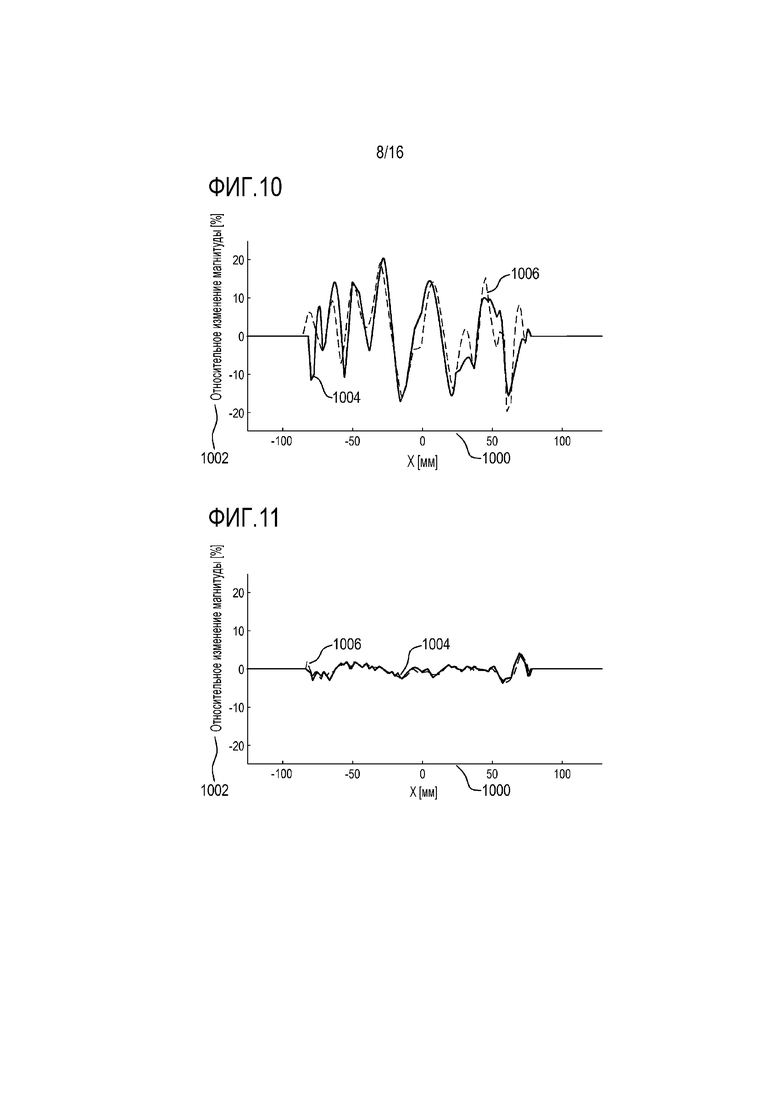
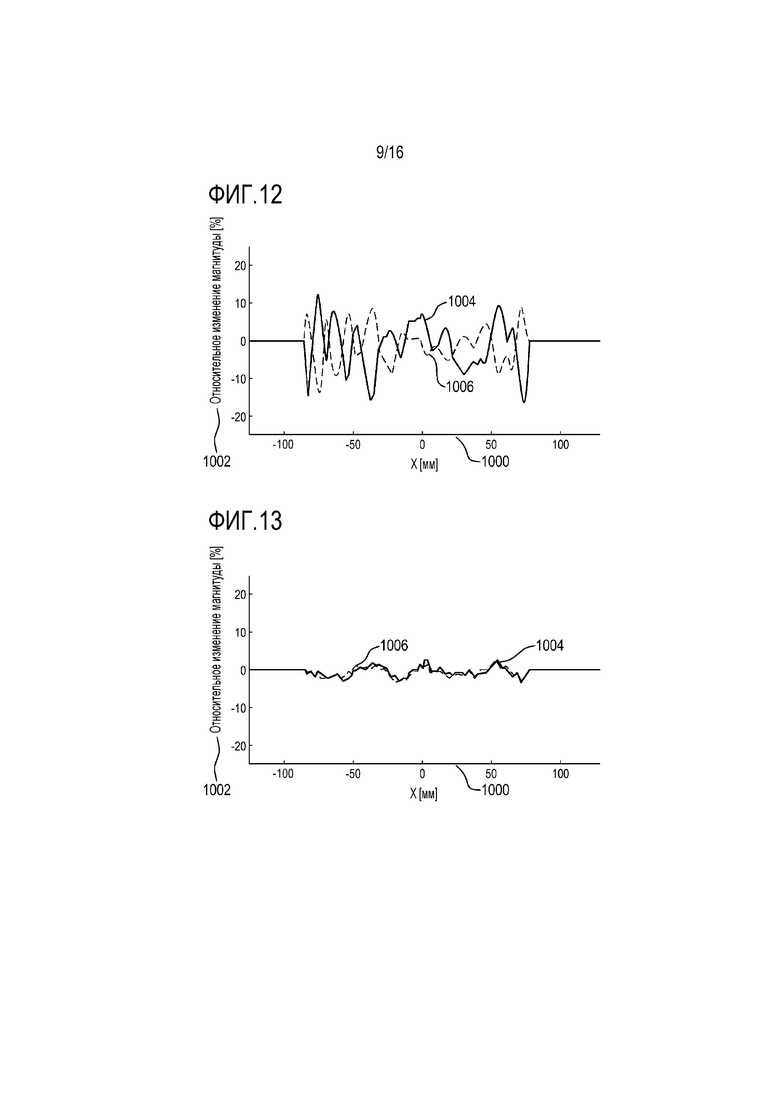
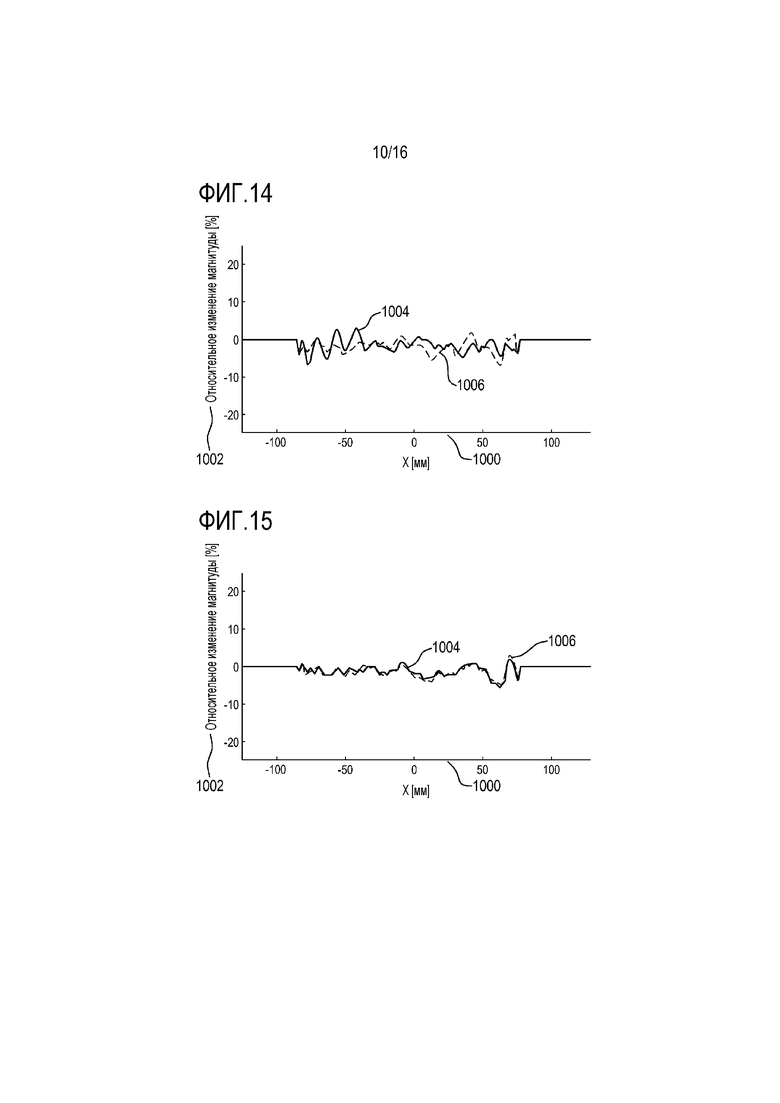
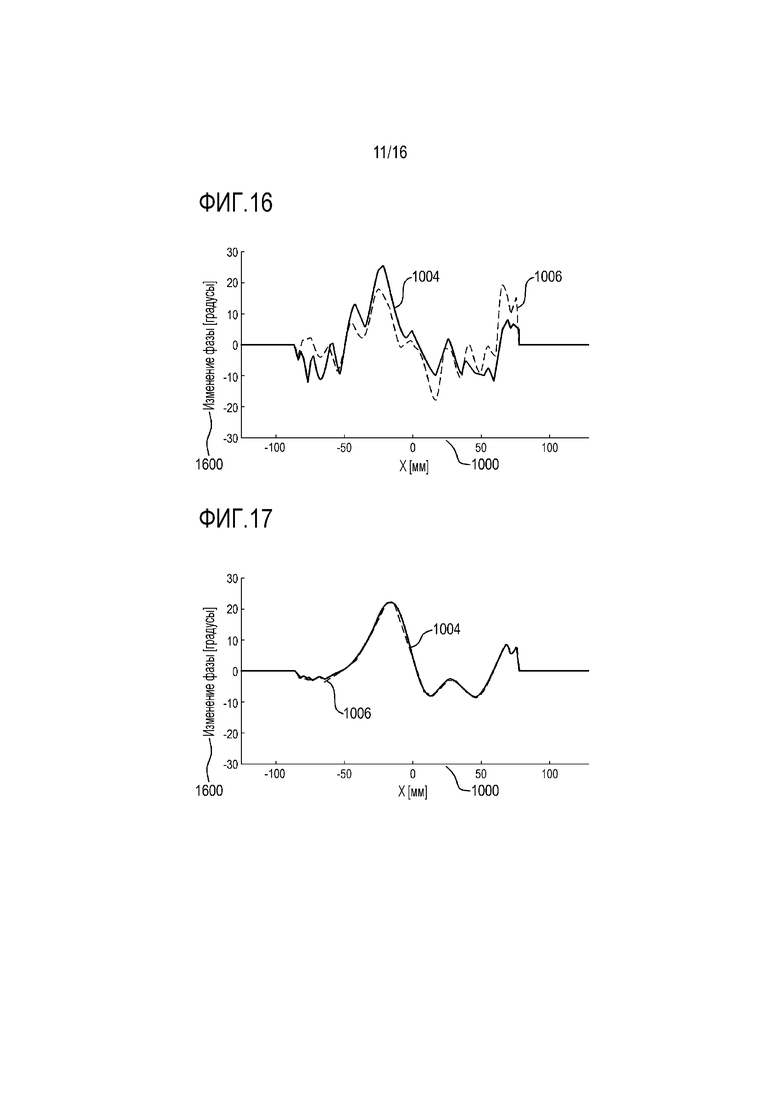
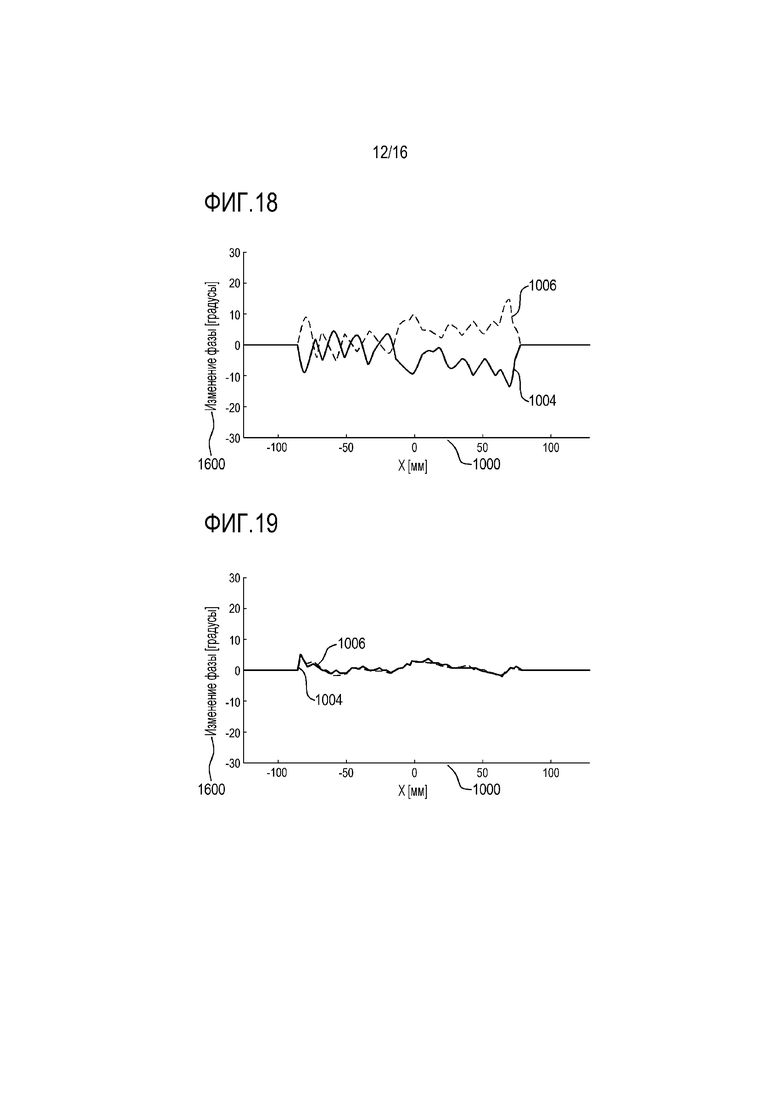
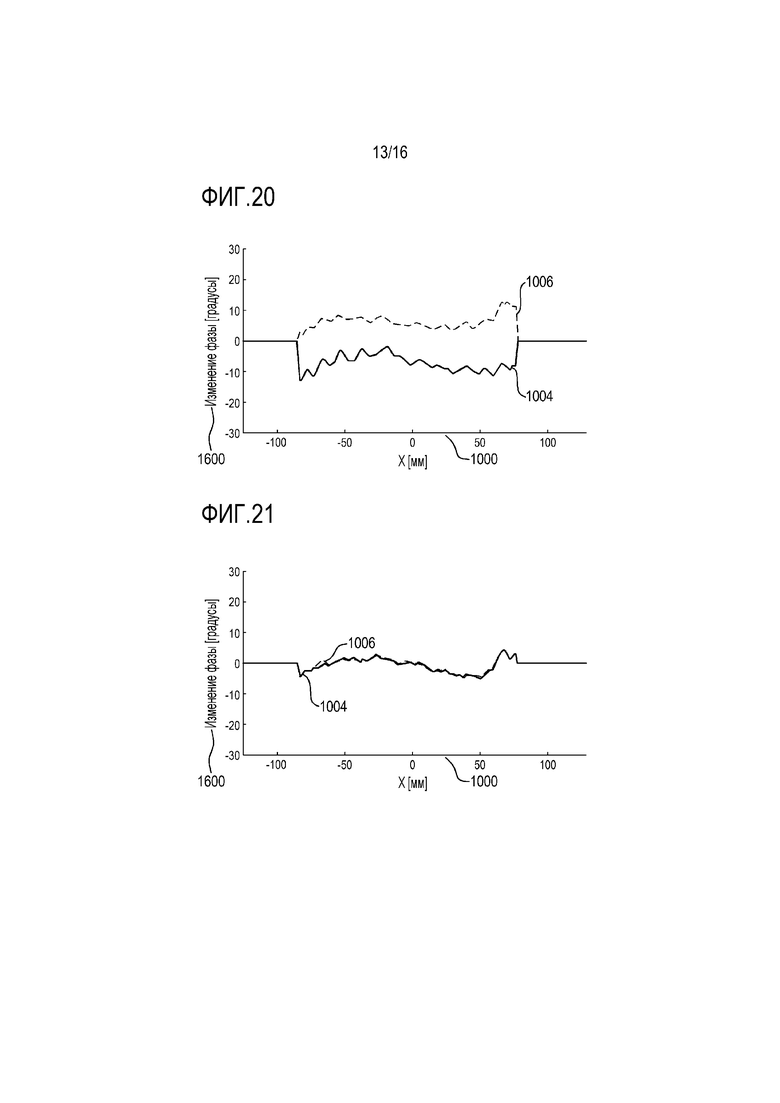
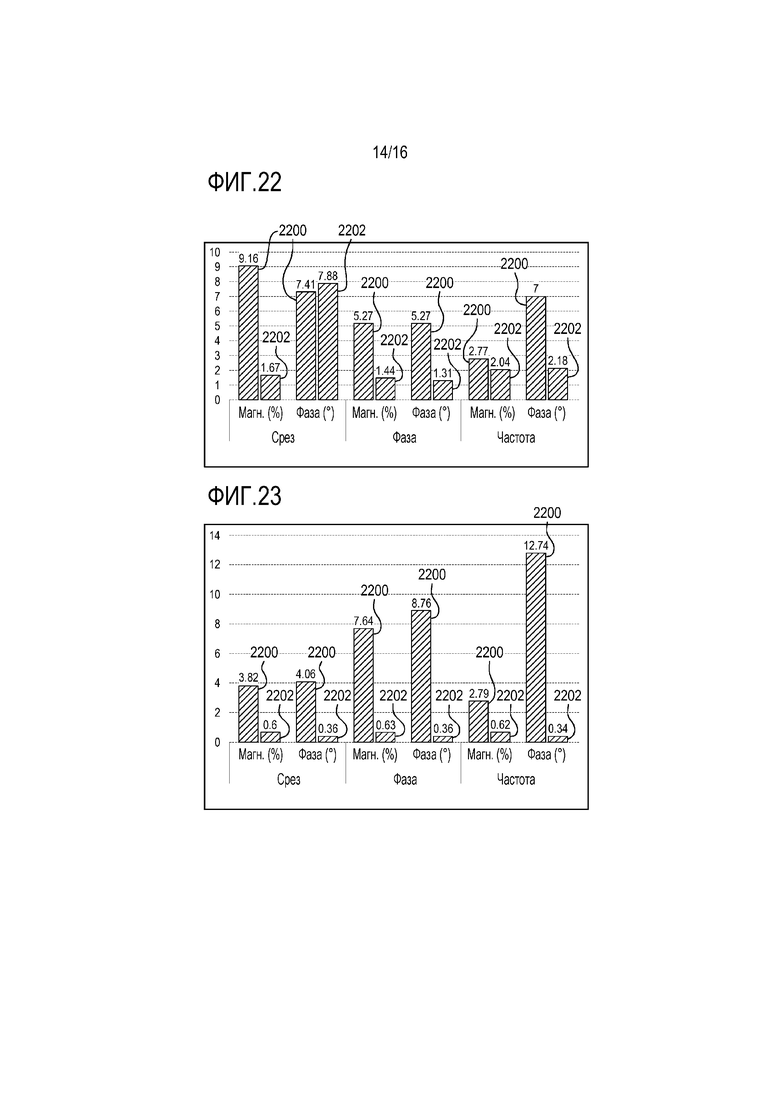
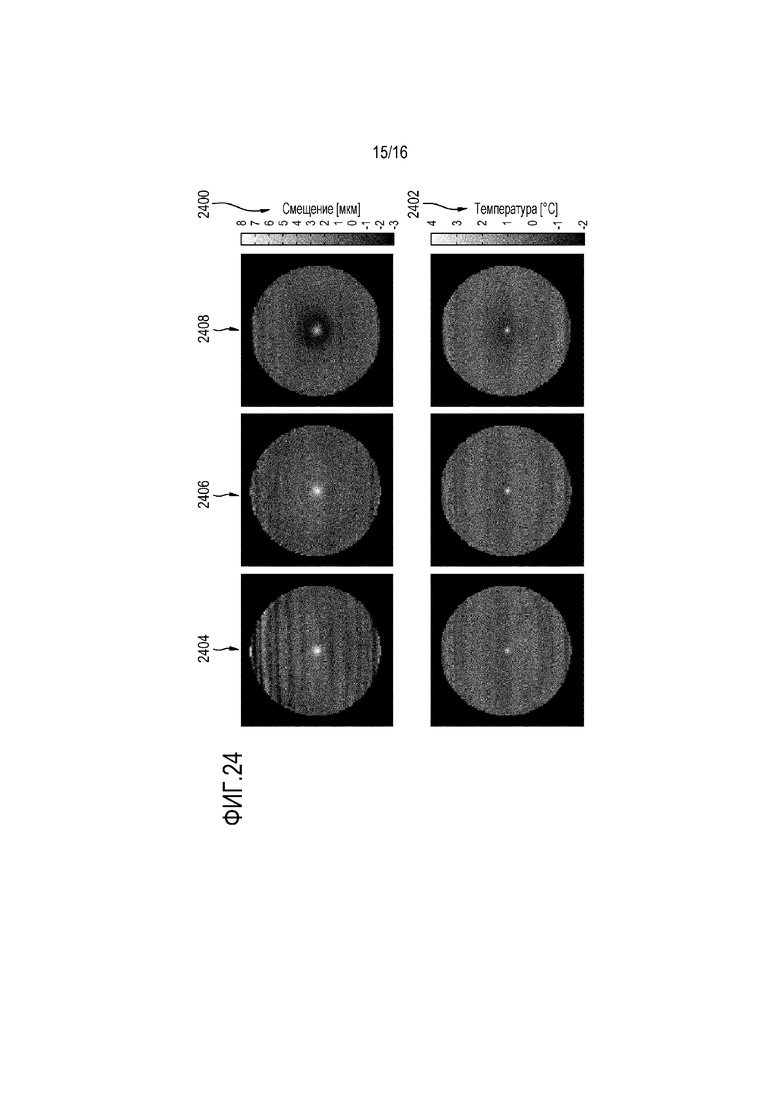
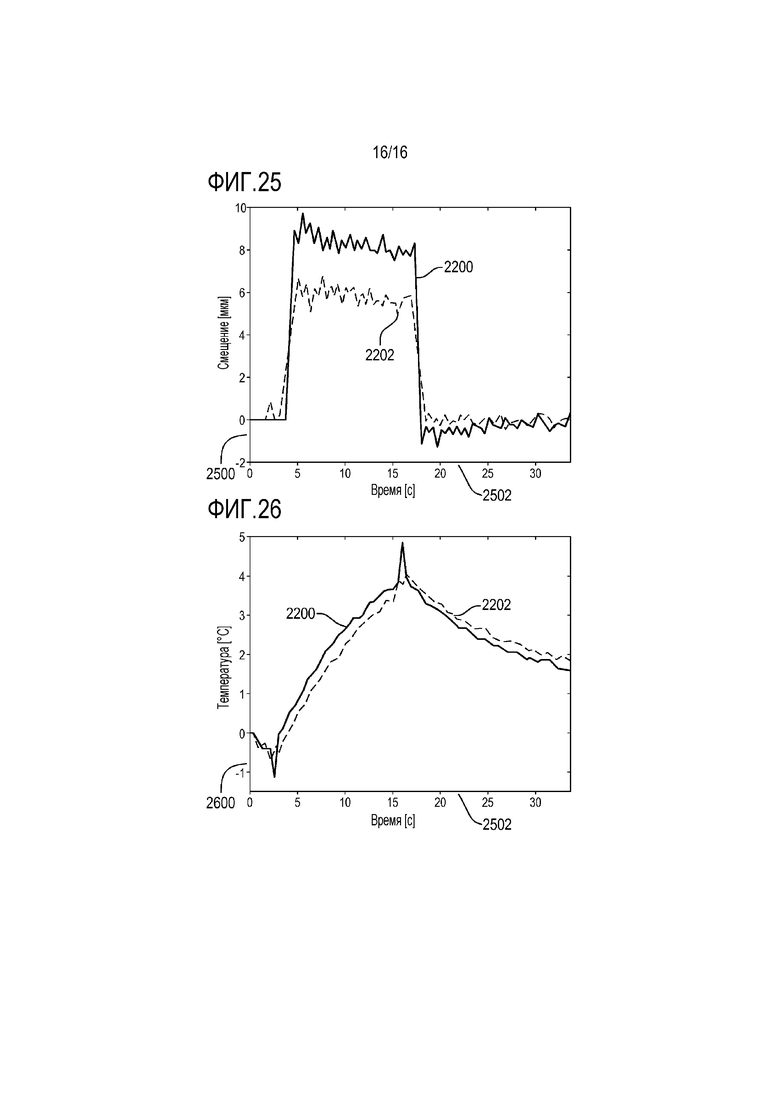
Группа изобретений относится к медицинской технике, а именно к средствам для магнитно-резонансной визуализации силы давления акустического излучения (MR-AFRI). Устройство содержит систему высокоинтенсивного сфокусированного ультразвука и систему магнитно-резонансной томографии для сбора магнитно-резонансных данных из зоны визуализации, при этом область соникации и зона визуализации по меньшей мере частично совмещаются, процессор управления, память для хранения машинно-выполняемых команд импульсной последовательности для управления системой магнитно-резонансной томографии в соответствии с протоколом визуализации силы давления акустического излучения, первых команд соникации для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на область соникации в соответствии с протоколом визуализации силы давления акустического излучения, вторых команд соникации для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на область соникации в соответствии с протоколом визуализации силы давления акустического излучения, причем команды импульсной последовательности задают сбор магнитно-резонансных данных в течение нескольких повторений импульсной последовательности, устанавливают для каждого из нескольких повторений последовательности первую группу градиентов кодирования движения и вторую группу градиентов кодирования движения, причем первая и вторая группы градиентов кодирования движения подаются с одинаковой полярностью, причем выполнение машинно-выполняемых команд предписывает процессору: собирать первые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука первыми командами соникации, причем первые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение первой группы градиентов кодирования движения; собирать вторые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука вторыми командами соникации, причем вторые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение второй группы градиентов кодирования движения и вводить разные задержки включения для первых и вторых команд соникации; реконструировать первое изображение с кодированием движения из первых магнитно-резонансных данных; реконструировать второе изображение с кодированием движения из вторых магнитно-резонансных данных и построить карту смещений по разности между первым изображением с кодированием движения и вторым изображением с кодированием движения. Устройство снабжено машиночитаемым носителем и осуществляет способ управления. Использование изобретений позволяет достичь оптимизации эффективности нагревания в области интереса. 3 н. и 10 з.п. ф-лы, 26 ил.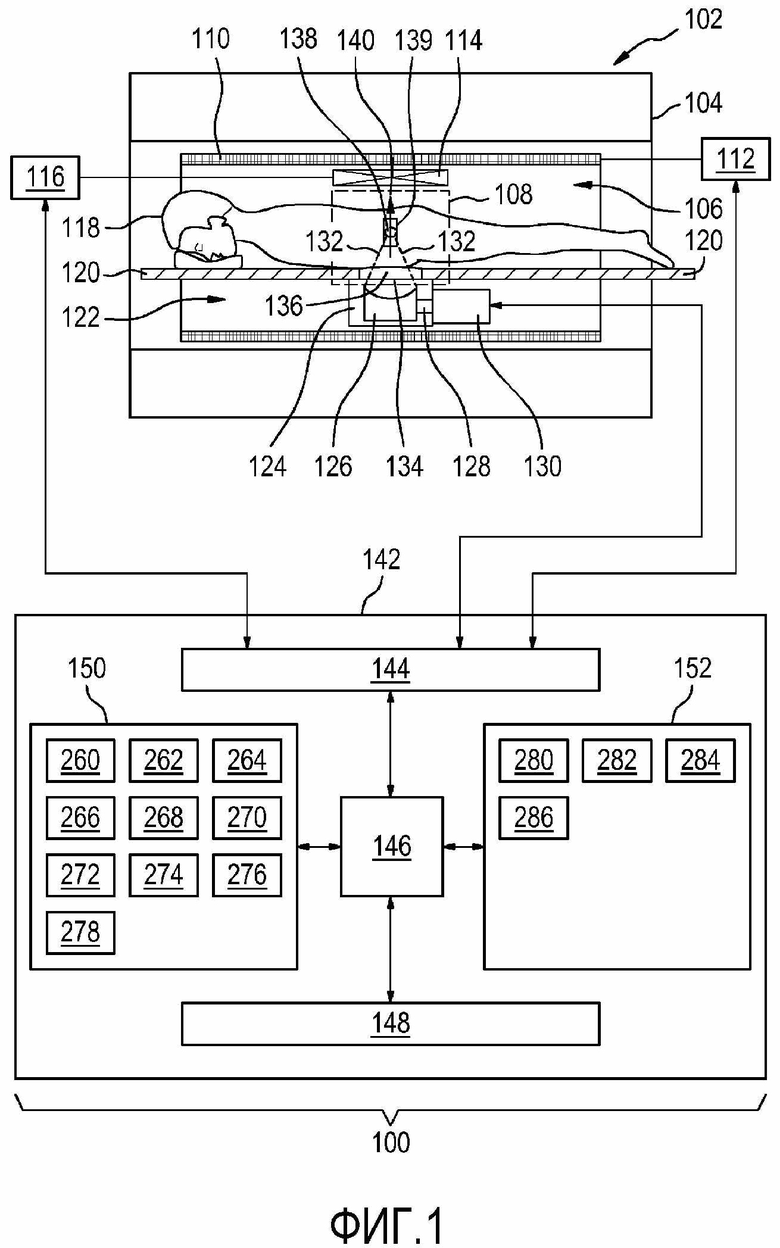
1. Медицинское устройство (100) для магнитно-резонансной визуализации силы давления акустического излучения (MR-ARFI), содержащее:
- систему (122) высокоинтенсивного сфокусированного ультразвука для соникации области (139) соникации,
- систему (102) магнитно-резонансной томографии для сбора магнитно-резонансных данных (266, 268) из зоны (108) визуализации, при этом область соникации и зона визуализации по меньшей мере частично совмещаются;
- процессор (146) для управления медицинским устройством;
- память (152) для хранения машинно-выполняемых команд (280, 282, 284, 286), причем память дополнительно хранит (260) команды импульсной последовательности для управления системой магнитно-резонансной томографии, чтобы собирать магнитно-резонансные данные в соответствии с протоколом визуализации силы давления акустического излучения, причем память дополнительно хранит первые команды (262) соникации для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на область соникации в соответствии с протоколом визуализации силы давления акустического излучения, причем память дополнительно хранит вторые команды (264) соникации для управления системой высокоинтенсивного сфокусированного ультразвука, чтобы воздействовать ультразвуком на область соникации в соответствии с протоколом (400, 500, 600) визуализации силы давления акустического излучения, причем команды импульсной последовательности задают сбор магнитно-резонансных данных в течение нескольких повторений импульсной последовательности, причем команды импульсной последовательности устанавливают для каждого из нескольких повторений последовательности первую группу (406) градиентов кодирования движения и вторую группу (408) градиентов кодирования движения, причем первая и вторая группы градиентов кодирования движения подаются с одинаковой полярностью, и причем выполнение машинно-выполняемых команд предписывает процессору:
собирать (300) первые магнитно-резонансные данные (266) посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука первыми командами соникации, причем первые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение первой группы градиентов кодирования движения;
собирать (302) вторые магнитно-резонансные данные (268) посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука вторыми командами соникации, причем вторые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение второй группы градиентов кодирования движения и
вводить разные задержки включения для первых и вторых команд соникации;
реконструировать (304) первое изображение (270) с кодированием движения из первых магнитно-резонансных данных;
реконструировать (306) второе изображение (272) с кодированием движения из вторых магнитно-резонансных данных; и
построить (308) карту (274) смещений по разности между первым изображением с кодированием движения и вторым изображением с кодированием движения.
2. Медицинское устройство по п. 1, в котором команды импульсной последовательности кодируют смещение в первом направлении в течение первой группы градиентов кодирования движения, причем команды импульсной последовательности кодируют смещение во втором направлении в течение второй группы градиентов кодирования движения, и причем первое направление противоположно второму направлению.
3. Медицинское устройство по любому из пп. 1, 2, в котором протокол визуализации силы давления акустического излучения является протоколом визуализации силы давления акустического излучения с применением градиентного эха.
4. Медицинское устройство по п. 3, в котором выполнение машинно-выполняемых команд дополнительно предписывает процессору вычислять температурную карту (276) с применением первых магнитно-резонансных данных и вторых магнитно-резонансных данных в соответствии со способом сдвига частоты протонного резонанса.
5. Медицинское устройство по любому из пп. 1, 2, в котором протокол визуализации силы давления акустического излучения является протоколом (400) визуализации силы давления акустического излучения с применением спинового эха.
6. Медицинское устройство по п. 1,
в котором команды импульсной последовательности устанавливают, что первая группа градиентов кодирования движения разделяется на первую часть (602) и вторую часть (604),
причем команды импульсной последовательности устанавливают, что вторая группа градиентов кодирования движения разделяется на третью часть (606) и четвертую часть (608),
причем команды импульсной последовательности устанавливают, что первая часть и вторая часть имеют противоположные полярности,
причем команды импульсной последовательности устанавливают, что третья часть и четвертая часть имеют противоположные полярности, и
причем команды импульсной последовательности устанавливают, что первая часть и четвертая часть имеют идентичные полярности.
7. Медицинское устройство по п. 6, в котором команды импульсной последовательности устанавливают предварительно заданную паузу (610) градиентов кодирования движения между первой частью и третьей частью, причем команды импульсной последовательности устанавливают предварительно заданную паузу градиентов кодирования движения между второй частью и четвертой частью.
8. Медицинское устройство по любому из предыдущих пунктов, в котором команды импульсной последовательности устанавливают предварительно заданную задержку (409) градиентов кодирования движения между первой группой градиентов кодирования движения и второй группой градиентов кодирования движения.
9. Медицинское устройство по любому из предыдущих пунктов, в котором предварительно заданная задержка является любой из следующих: от 1 мс до 20 мс, от 2 мс до 4 мс, от 3 мс до 5 мс и от 4 мс до 6 мс.
10. Медицинское устройство по любому из предыдущих пунктов, в котором выполнение машинно-выполняемых команд предписывает процессору выполнять что-то одно из следующего:
- собирать первые магнитно-резонансные данные и вторые магнитно-резонансные данные последовательно и
- собирать первые магнитно-резонансные данные и вторые магнитно-резонансные данные посредством чередования сбора строк k-пространства.
11. Медицинское устройство по п. 1, в котором выполнение машинно-выполняемых команд дополнительно предписывает процессору:
- принимать диаграмму соникации; и
- модифицировать диаграмму соникации с применением карты смещений.
12. Способ управления медицинским устройством (100) для магнитно-резонансной визуализации силы давления акустического излучения (MR-ARFI), в котором медицинское устройство содержит систему (122) высокоинтенсивного сфокусированного ультразвука для воздействия ультразвуком на область соникации, при этом медицинское устройство дополнительно содержит систему (102) магнитно-резонансной томографии для сбора магнитно-резонансных данных (266, 268) из зоны визуализации, причем область соникации и зона визуализации по меньшей мере частично совмещаются, причем способ содержит следующие этапы:
- собирают (300) первые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии командами (260) импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука первыми командами соникации (262), причем команды импульсной последовательности управляют системой магнитно-резонансной томографии, чтобы собирать магнитно-резонансные данные в соответствии с протоколом (400, 500, 600) визуализации силы давления акустического излучения, причем импульсная последовательность задает сбор магнитно-резонансных данных в течение нескольких повторений импульсной последовательности, причем команды импульсной последовательности устанавливают для каждого из нескольких повторений последовательности первую группу (406) градиентов кодирования движения и вторую группу (408) градиентов кодирования движения, причем первая и вторая группы градиентов кодирования движения подаются с одинаковой полярностью, и причем первые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение первой группы градиентов кодирования движения в соответствии с протоколом визуализации силы давления акустического излучения;
- собирают (302) вторые магнитно-резонансные данные (268) посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука вторыми командами соникации, причем вторые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение второй группы градиентов кодирования движения в соответствии с протоколом визуализации силы давления акустического излучения;
- вводят разные задержки включения для первых и вторых команд соникации;
- реконструируют (304) первое изображение (270) с кодированием движения из первых магнитно-резонансных данных;
- реконструируют (306) второе изображение (272) с кодированием движения из вторых магнитно-резонансных данных; и
- реконструируют (308) карту (274) смещений по разности между первым изображением с кодированием движения и вторым изображением с кодированием движения.
13. Компьютерно-читаемый носитель, содержащий команды для выполнения процессором (146), управляющим медицинским устройством (100), при этом медицинское устройство содержит: систему (122) высокоинтенсивного сфокусированного ультразвука для воздействия ультразвуком на область соникации, причем медицинское устройство дополнительно содержит систему (102) магнитно-резонансной томографии для сбора магнитно-резонансных данных (266, 268) из зоны (108) визуализации, причем область соникации и зона визуализации по меньшей мере частично совмещаются, причем выполнение машинно-выполняемых команд предписывает процессору:
- собирать (300) первые магнитно-резонансные данные (266) посредством управления системой магнитно-резонансной томографии командами (260) импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука первыми командами (262) соникации, причем команды импульсной последовательности предписывают системе магнитно-резонансной томографии собирать первые магнитно-резонансные данные в соответствии с протоколом (400, 500, 600) визуализации силы давления акустического излучения, причем команды импульсной последовательности задают сбор магнитно-резонансных данных в течение нескольких повторений импульсной последовательности, причем команды импульсной последовательности устанавливают для каждого из нескольких повторений последовательности первую группу (406) градиентов кодирования движения и вторую группу (408) градиентов кодирования движения, причем первая и вторая группы градиентов кодирования движения подаются с одинаковой полярностью, и причем первые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение первой группы градиентов кодирования движения в соответствии с протоколом визуализации силы давления акустического излучения;
- собирать (302) вторые магнитно-резонансные данные (268) посредством управления системой магнитно-резонансной томографии командами импульсной последовательности и посредством управления системой высокоинтенсивного сфокусированного ультразвука вторыми командами соникации, причем вторые команды соникации предписывают системе высокоинтенсивного сфокусированного ультразвука воздействовать ультразвуком на область соникации в течение второй группы градиентов кодирования движения в соответствии с протоколом визуализации силы давления акустического излучения;
- вводить разные задержки включения для первых и вторых команд соникации;
- реконструировать (304) первое изображение (270) с кодированием движения из первых магнитно-резонансных данных;
- реконструировать (306) второе изображение (272) с кодированием движения из вторых магнитно-резонансных данных; и
- построить (308) карту (274) смещений по разности между первым изображением с кодированием движения и вторым изображением с кодированием движения.
| US2014350439 A1, 27.11.2014 | |||
| Y | |||
| Hertzberg et al, Ultrasound focusing using magnetic resonance acoustic radiation force imaging: Application to ultrasound transcranial therapy, MEDICAL PHYSICS, v.37, Issue 6 Part 1, June 2010, pp.2934-2942 | |||
| Vincent Auboiroux et al | |||
| ARFI-Prepared MRgHIFU in Liver: SimultaneousMapping of ARFI-Displacement and |

