ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к энергетическому воздействию ультразвуком в теле субъекта, с использованием катетера, в частности к наведению катетера, с использованием визуализации на основе силы акустического излучения.
УРОВЕНЬ ТЕХНИКИ
Неинвазивное или минимально инвазивное лечение опухолей предстательной железы представляет собой область повышенного интереса. Терапия высокоинтенсивным фокусированным ультразвуком (HIFU) опухолей предстательной железы показала большие перспективы в уменьшении побочных эффектов традиционных видов лечения при эффективном лечении опухолей. Большинство клинических случаев, известных до настоящего времени, были реализованы при ультразвуковом наведении, но МР-наведение имеет некоторые преимущества, которые могут дополнительно улучшить клинический исход процедур. В дополнение к температурному формированию изображений, МР-наведение также предусматривает использование МРВ для планирования процедуры.
Магниторезонансная визуализация на основе силы акустического излучения - это магниторезонансная технология, способная отображать смещения, производимые сфокусированными ультразвуковыми импульсами. В журнальной публикации McDonnold et al. Med. Phys. 35 (8), август 2008 г., стр. 3748-3758, представлен обзор магниторезонансной визуализации на основе силы акустического излучения, и то, как можно применять данную технологию.
В публикации Holbrook et. Al, Med. Phys. 38 (9), сентябрь 2011 г., стр. 5081-5089 раскрыто использование магниторезонансной визуализации на основе силы акустического излучения, для обеспечения способа быстрой визуализации фокуса измерительного преобразователя, для терапии интенсивным фокусированным ультразвуком (HIFU), без повреждения ткани, для обеспечения точного выполнения плана лечения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В независимых пунктах формулы изобретение предусматривает медицинское устройство, способ работы медицинского устройства и компьютерный программный продукт. Варианты выполнения приведены в зависимых пунктах формулы изобретения.
Как должно быть учтено специалистами в данной области техники, аспекты настоящего изобретения могут быть реализованы в виде устройства, способа или компьютерного программного продукта.
Следовательно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта выполнения, полностью программного варианта выполнения (включающего в себя встроенное программное обеспечение, резидентное программное обеспечение, микрокод, и т.д.) или варианта выполнения, комбинирующего аспекты программного обеспечения и аппаратного устройства, которые все в основном могут здесь называться «схемой», «модулем» или «системой». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, реализованного на одном или более машиночитаемых носителях, на которых реализован машиноисполняемый код.
Может быть использовано любое сочетание одного или более машиночитаемых носителей. Машиночитаемый носитель может представлять собой носитель машиночитаемых сигналов или машиночитаемый носитель памяти. Термин «машиночитаемый носитель памяти», используемый в настоящем документе, охватывает любой физический носитель памяти, который может сохранять команды, выполняемые процессором вычислительного устройства. Машиночитаемый носитель памяти может называться постоянным машиночитаемым носителем памяти. Машиночитаемый носитель памяти также может называться материальным машиночитаемым носителем. В некоторых вариантах выполнения машиночитаемый носитель памяти также может быть пригоден для хранения данных, которые могут быть доступны для процессора вычислительного устройства. Примеры машиночитаемого носителя памяти включают в себя (не ограничиваясь): гибкий диск, накопитель на жестком магнитном диске, твердотельный жесткий диск, флеш-память, флеш-накопитель USB, запоминающее устройство с произвольной выборкой (ЗУПВ), постоянное запоминающее устройство (ПЗУ), оптический диск, магнитооптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и универсальные цифровые диски (DVD), например, диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин машиночитаемый носитель памяти также относится к различным типам носителей информации, доступных для компьютерного устройства через сеть или канал связи. Например, данные могут быть считаны через модем, через Интернет или через локальную вычислительную сеть. Машиноисполняемый код, реализованный на машиночитаемом носителе, может быть передан с использованием любого подходящего носителя, включающего в себя (но не ограниченного) беспроводной, проводной, оптоволоконный кабель, РЧ-носитель, и т.д, или любого подходящего сочетания вышеописанного.
Носитель машиночитаемых сигналов может включать в себя распространяемый сигнал данных с реализованным на нем машиноисполняемым кодом, например, в полосе частот видеосигнала или в виде части несущей волны. Такой распространяемый сигнал может принимать самые различные формы, включающие в себя (но не ограниченные) электромагнитные, оптические или любые подходящие их сочетания. Носитель машиночитаемых сигналов может представлять собой любой машиночитаемый носитель, который не является машиночитаемым носителем памяти, и который может передавать, распространять или переносить программу для использования посредством или в соединении с системой, устройством или устройством выполнения команд.
«Компьютерная память» или «память» является примером машиночитаемого носителя памяти. Компьютерная память представляет собой любую память, к которой имеется прямой доступ со стороны процессора. «Запоминающее устройство компьютера» или «запоминающее устройство» является дополнительным примером машиночитаемого носителя памяти. Запоминающее устройство компьютера представляет собой любой энергонезависимый машиночитаемый носитель памяти. В некоторых вариантов выполнения запоминающее устройство компьютера также может представлять собой компьютерную память, или наоборот.
«Процессор» в контексте настоящего документа охватывает электронный компонент, пригодный для выполнения машиноисполняемой программы или команды, или машиноисполняемый код. Ссылки на вычислительное устройство, содержащее «процессор», следует интерпретировать как возможно содержащее более одного процессора или обрабатывающего запоминающего устройства на магнитных сердечниках. Процессор может представлять собой, например, многоядерный процессор. Процессор также может относиться к комплекту процессоров в рамках одиночной компьютерной системе или быть распределенным среди множества компьютерных систем. Термин вычислительное устройство следует интерпретировать как возможно относящийся к комплекту или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Компьютерный исполнительный код может быть выполнен на множестве процессоров, которые могут находиться в одном и том же вычислительном устройстве, или которые также могут быть распределены по множеству вычислительных устройств.
Машиноисполняемый код может содержать машиноисполняемые команды или программу, которая побуждает процессор выполнять аспект настоящего изобретения. Машиноисполняемый код для осуществления операций для аспектов настоящего изобретения может быть написан в любом сочетании из одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++, и т.п., и стандартные процедурные языки программирования, такие как язык программирования «C» или аналогичные языки программирования, и скомпилированные в виде машиноисполняемых команд. В некоторых случаях компьютерный исполнительный код может присутствовать в форме языка высокого уровня или в предварительно скомпилированной форме и быть использован в сочетании с преобразователем данных, который формирует команды, оперативно исполняемые на компьютере.
Машиноисполняемый код может исполняться полностью на компьютере пользователя, частично на компьютере пользователя, в виде автономного программного пакета, частично на компьютере пользователя, частично - на удаленном компьютере, или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с компьютером пользователя через сеть любого типа, включая локальную вычислительную сеть (ЛВС) или глобальную вычислительную сеть (ГВС), или может быть сделано соединение с внешним компьютером (например, через Интернет, с использованием провайдера службы Интернет).
Аспекты настоящего изобретения описаны со ссылкой на иллюстрации в виде схемы последовательности операций и/или блок-схемы способов, устройств (систем) и компьютерных программных продуктов согласно вариантам выполнения изобретения. Следует понимать, что каждый блок или часть блоков схем последовательности операций, иллюстраций и/или блок-схем может быть реализована с помощью команд компьютерной программы в форме компьютерного исполнительного кода, когда это приемлемо. Следует еще понимать, что когда это не является взаимоисключающим, сочетания блоков на различных технологических картах, иллюстрациях и/или блок-схемах могут быть скомбинированы. Эти команды компьютерной программы могут быть обеспечены для процессора компьютера общего назначения, компьютера специального назначения или другого программируемого устройства для обработки данных, для получения машины, таким образом, чтобы команды, которые исполняются через процессор компьютера или другого программируемого устройства обработки данных, создавали средства для реализации функций/действий, указанных блоке или блоках технологической карты и/или блок-схемы.
Эти команды компьютерной программы также могут быть сохранены на машиночитаемом носителе, который может направлять компьютер, другое программируемое устройство обработки данных или другие устройства на функционирование определенным образом, вследствие чего команды, сохраненные на машиночитаемом носителе, , производят готовое изделие, включающее в себя команды, которые реализуют функцию/действие, указанное в блоке или блоках технологической карты и/или блок-схемы.
Команды компьютерной программы также могут быть загружены на компьютер, другое программируемое устройство обработки данных, или другие устройства, чтобы вызвать выполнение последовательных рабочих этапов на компьютере, другое программируемое устройство или другие устройства, для создания такого реализуемого на компьютере процесса, чтобы команды, которые исполняются на компьютере или на другом программируемом устройстве обеспечивали процессы для выполнения функций/действий, указанных в блоке или блоках технологической карты и/или блок-схемы. «Пользовательский интерфейс» в контексте настоящего документа представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Пользовательский интерфейс» также может называться «устройством человеческого интерфейса». Пользовательский интерфейс может обеспечить информацию или данные для оператора и/или принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечить ввод от оператора на компьютер и может обеспечить вывод для пользователя от компьютера. Иными словами, пользовательский интерфейс может позволить оператору управлять компьютером, а интерфейс может позволить компьютеру указывать на эффекты управления, осуществляемого оператором. Отображение данных или информации на дисплее или графический пользовательский интерфейс является примером предоставления информации оператору. Прием данных через клавиатуру, мышь, шаровой манипулятор, сенсорную панель, манипулятор-указку, графический планшет, джойстик, геймпад, веб-камеру, гарнитуру, рычаг переключения передач, рулевое колесо, педали, сенсорную перчатку, танцевальный коврик, пульт дистанционного управления и акселерометр являются примерами компонентов пользовательского интерфейса, облегчающими прием информации или данных от оператора.
«Аппаратный интерфейс» в контексте настоящего документа охватывает интерфейс, который позволяет процессору компьютерной системы взаимодействовать и/или управлять внешним вычислительным устройством. Аппаратный интерфейс может позволить процессору отправлять управляющие сигналы или команды на внешнее вычислительное устройство. Аппаратный интерфейс также может дать возможность процессору обмениваться данными с внешним вычислительным устройством и/или устройством. Примеры аппаратного интерфейса включают в себя (но не ограничены): универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение блютус, беспроводную локальную вычислительную сеть, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, интерфейс MIDI, интерфейс аналогового ввода и интерфейс цифрового ввода.
«Дисплей» или «дисплейное устройство» в контексте настоящего документа охватывает выходное устройство или пользовательский интерфейс, выполненный с возможностью отображения изображений или данных. Дисплей может выводить визуальные, звуковые и или тактильные данные. Примеры дисплея включают в себя (не ограничиваясь): монитор компьютера, экран телевизора, сенсорный экран, тактильный электронный дисплей, экран Брайля, катодную лучевую трубку (КЛТ), запоминающую трубку, дисплей на бистабильных ячейках, электронный документ, векторный дисплей, плоскопанельный дисплей, вакуумный флуоресцентный дисплей (ВФД), дисплеи на светоизлучающих диодах (СИД), электролюминесцентный дисплей (ЭЛД), плазменные дисплеи (ПД), жидкокристаллический дисплей (ЖКД), дисплеи на органических светоизлучающих диодах (ОСИД), проектор и дисплей, устанавливаемый на голове.
Данные магнитного резонанса (МР) определены здесь как записанные измерения сигналов радиочастоты, испускаемых атомными спинами антенны магниторезонансного устройства во время сканирования путем магниторезонансной визуализации. Изображение магниторезонансной визуализации (МРВ) определено в настоящем документе в виде реконструированной двух- или трехмерной визуализации анатомических данных, содержащихся в данных магниторезонансной визуализации. Эта визуализация может быть выполнена с использованием компьютера.
«Последовательность импульсов» в контексте настоящего документа охватывает набор последовательных команд, используемых для управления системой магниторезонансной визуализации, для выполнения конкретного протокола радиологического исследования. Последовательность импульсов визуализации на основе силы акустического излучения представляет собой последовательность импульсов, которая позволяет системе магниторезонансной визуализации получать данные магнитного резонанса, которые могут быть использованы для создания карт смещений, вызванных ультразвуковыми импульсами.
«Емкостной ультразвуковой преобразователь, полученный путем микрообработки» (CMUT) в контексте настоящего документа охватывает емкостной ультразвуковой преобразователь, который был изготовлен с использованием технологий микрообработки. Технологии микрообработки представляют собой технологии изготовления тонких пленок; обычно их изготавливают с использованием процессов, идентичных или сходных с процессами, используемыми для изготовления интегральных схем.
Последние разработки привели к исследованиям, согласно которым медицинские ультразвуковые преобразователи могут быть изготовлены с использованием полупроводниковых процессов. Эти процессы могут представлять собой те же процессы, которые используются для создания электронной схемы, необходимой для ультразвукового зонда, такие как КМОП-процесс. Эти разработки содержат полученные ультразвуковые преобразователи, полученные путем микрообработики или MUT. MUT был изготовлен двумя конструкционными способами: один с использованием полупроводникового слоя с пьезоэлектрическими свойствами (PMUT), а другой - с использованием диафрагмы и подложки с электродными пластинами, которые демонстрируют емкостной эффект (CMUT). Преобразователи CMUT представляют собой миниатюрные диафрагмоподобные устройства с электродами, которые преобразуют звуковые колебания полученного ультразвукового сигнала в модулированное емкостное сопротивление. Для осуществления передачи емкостной заряд, прикладываемый к электродам, модулируют для достижения вибрации диафрагмы устройства, а следовательно, передачи звуковой волны.
Поскольку эти устройства изготавливают путем полупроводниковых процессов, устройства, как правило, имеют размеры в диапазоне 10-200 микрон, но могут доходить до диаметров устройства 300-500 микрон. Многие такие отдельные CMUT могут быть соединены друг с другом и функционировать в унисон в виде одиночного элемента преобразователя. Например, от четырех до шестнадцати CMUT могут быть связаны друг с другом, чтобы функционировать в унисон в виде одиночного элемента преобразователя. Типичный двумерный массив первичных преобразователей в настоящее время может иметь 2000-3000 пьезоэлектрических элементов преобразователя. При изготовлении в виде массива CMUT может быть использовано более одного миллиона ячеек CMUT. Неожиданно, более ранние результаты показали, что выход от установки по изготовлению полупроводников для массивов CMUT этого размера должен быть существенно повышен, по сравнению с выходом для массивов пьезоэлектрических преобразователей (PZT) на основе цирконата-титаната свинца, состоящих из нескольких тысяч элементов преобразователя.
В одном аспекте изобретение предусматривает медицинский устройство, содержащее систему магниторезонансной визуализации для приема данных магнитного резонанса от субъекта. Медицинское устройство дополнительно содержит ультразвуковую систему, выполненную с возможностью соединения с катетером с ультразвуковым массивом. Ультразвуковая система выполнена с возможностью приведения в действие ультразвукового массива. Приведение в действие ультразвукового массива в контексте настоящего документа охватывает подачу электропитания к ультразвуковому массиву, вследствие чего он является пригодным для формирования ультразвука. Медицинское устройство дополнительно содержит память для хранения машиноисполняемых команд. Медицинское устройство дополнительно содержит процессор для управления медицинским устройством. Выполнение машиноисполняемых команд побуждает процессор управлять ультразвуковой системой для формирования по меньшей мере одного импульса акустического излучения ультразвуковой системой в местоположении целевой зоны. Формируемый ультразвук находится ниже заданного уровня. Заданный уровень может быть выбран таким образом, чтобы формируемая ультразвуковая энергия не вызывала локального повреждения в теле субъекта.
Например, набор может быть задан таким образом, чтобы нагрев тела субъекта в целевой зоне или приблизительно рядом с целевой зоной был таким, чтобы не возникал некроз ткани. Выполнение машиноисполняемых команд дополнительно побуждает процессор принимать данные магнитного резонанса при управлении системой магниторезонансной визуализации посредством последовательности импульсов по меньшей мере частично во время формирования по меньшей мере одного импульса акустического излучения. Последовательность импульсов представляет собой последовательность импульсов визуализации на основе силы акустического излучения. Выполнение машиноисполняемых команд дополнительно побуждает процессор реконструировать по меньшей мере одно импульсное изображение на основе силы акустического излучения с использованием данных магнитного резонанса. Выполнение машиноисполняемых команд дополнительно побуждает процессор определять зону энергетического воздействия для катетера, с использованием по меньшей мере частично по меньшей мере одного импульсного изображения на основе силы акустического излучения.
Этот вариант выполнения может обладать преимуществом, состоящим в том, что определение того, где энергетическое воздействие будет выполнено катетером, может быть сделано очень быстро и очень эффективно с использованием визуализации на основе силы акустического излучения, или также известного как импульсная визуализация на основе силы акустического излучения.
Импульсную визуализацию на основе силы акустического излучения применяют с использованием сфокусированных ультразвуковых импульсов, с использованием массивов первичных преобразователей, которые направляют ультразвук на фокус. Изображения, созданные в результате формирования изображения силы акустического излучения, обычно обладают взвешенной жесткостью и используются для предоставления информации о локальных механических свойствах ткани. В этом варианте выполнения используют аналогичную технологию, однако, не с системой с высокоинтенсивным сфокусированным ультразвуком, а с использованием катетера. По своей природе, катетер не обязательно направляет ультразвук на сфокусированную точку. Эта задача осуществляется с использованием катетеров для ультразвуковой терапии. С использованием визуализации на основе силы акустического излучения общее распределение мест, где будет выходить ультразвуковая энергия, может быть точно предсказано. При использовании катетера, ультразвуковая энергия не будет доходить до самого максимума или до фокусной точки, а может быть распределена по всему телу субъекта. Формирование изображения силы акустического излучения может облегчить точное нацеливание или наведение в основном несфокусированного ультразвука, выходящего из катетера, в теле субъекта. Технология подобно магниторезонансной термометрии может быть использована также для нацеливания ультразвука, однако ткань может нуждаться в нагреве в измеряемом количестве. Формирование изображения силы акустического излучения обладает преимуществом перед магниторезонансной термометрией в том, что она дает более быстрые результаты, и при этом происходит лишь минимальный нагрев.
Определение зоны энергетического воздействия может быть осуществлено, например, путем отметки места, где имеет место максимальная сила излучения, получаемая ультразвуком. Это может дать более быструю и точную информацию, чем выполнение, допустим, тестового импульса. В этом варианте выполнения энергия может быть намного ниже, чем необходимо для выявления упомянутым тестовым импульсом. При выполнении тестового импульса может быть использована сниженная энергия, и может быть отмечено повышение температуры. В настоящем варианте выполнения смещение ткани может быть вызвано намного меньшим ультразвуковым импульсом. Это может способствовать более быстрому или более частому тестированию местоположения зоны энергетического воздействия для катетера. Это может способствовать более точному нацеливанию с использованием катетера, чем с традиционными протоколами тестового импульса.
В другом варианте выполнения катетер содержит множество ультразвуковых элементов. Каждый из множества ультразвуковых элементов выполнен с возможностью формирования ультразвука на множестве частот. Ультразвуковая система выполнена с возможностью управления каждым из ультразвуковых элементов для формирования ультразвука на множестве частот, причем по меньшей мере один импульс акустического излучения содержит множество импульсов или импульсов с ультразвуком, формируемым с использованием по меньшей мере некоторых из множества частот. Выполнение команд дополнительно побуждает процессор реконструировать множество импульсных изображений на основе силы акустического излучения с использованием данных магнитного резонанса, полученных по меньшей мере частично во время множества импульсов.
Выполнение машиноисполняемых команд дополнительно побуждает процессор принимать план лечения, характерный для целевой зоны в теле субъекта. Зона энергетического воздействия может быть определена в зависимости от частоты ультразвука, формируемого ультразвуковыми элементами. Выполнение команд может дополнительно побуждать процессор определять частоту воздействия ультразвуком для каждого из ультразвуковых элементов с использованием этой зоны энергетического воздействия в зависимости от частоты.
В зависимости от конструкции катетера множество ультразвуковых элементов могут иметь множество или диапазон частот, при которых может формироваться ультразвук. Например, если используются пьезоэлектрические элементы, то может иметь место дискретное множество частот, применимых для использования. Если используется емкостной ультразвуковой преобразователь, - так называемый CMUT, полученный путем микрообработки, то частота может быть легко выбрана в диапазоне, который определяют с помощью структуры преобразователей CMUT. В этом варианте выполнения процедуру повторяют, с использованием множества частот, и тогда частоты выбирают для различных ультразвуковых элементов таким образом, чтобы ультразвук был направлен на целевую зону.
Этот вариант выполнения может быть особо выгодным, поскольку определение зоны энергетического воздействия может быть сделано для различных частот и отдельных ультразвуковых элементов или групп, с использованием визуализации на основе силы акустического излучения. Большое количество таких изображений может быть сконструировано очень быстро и без очень сильного использования эффективного нагрева ткани. Это может способствовать более усовершенствованному ориентированию целевой зоны, чем могло бы быть возможным, если упомянутая стандартный тестовый импульс был бы использован с термическим формированием изображения.
В другом варианте выполнения множество ультразвуковых элементов содержат по меньшей мере один массив емкостных первичных ультразвуковых преобразователей, полученных путем микрообработки. Массивы могут управляться различными способами. Например, массив в некоторых вариантах выполнения может управляться как один ультразвуковой элемент, при этом все емкостные ультразвуковые преобразователи, полученные путем микрообработки, работают на одинаковой частоте. В других вариантах выполнения частота может быть различной в одном массиве CMUT. В других вариантах выполнения фаза, полученная отдельными емкостными ультразвуковыми преобразователями, полученными путем микрообработки, также может быть управляемой. Этот может способствовать более точному или более прецизионному нацеливанию с использованием катетера.
В другом варианте выполнения ультразвуковая система выполнена с возможностью регулирования фокусировки по меньшей мере одного массива емкостных первичных ультразвуковых преобразователей, полученных путем микрообработки, путем управления фазой электропитания, подаваемой на емкостные элементы по меньшей мере одного емкостного ультразвукового преобразователя, полученного путем микрообработки. Выполнение машиноисполняемых команд побуждает процессор управлять фазой электропитания, подаваемого на емкостные элементы по меньшей мере одного емкостного ультразвукового преобразователя, полученного путем микрообработки, для управления местоположением зоны энергетического воздействия. В этом варианте выполнения также выполняют управление частотой фазы электропитания. Этот может способствовать форме нацеливания целевой зоны и снизить степень, в которой катетер нуждается в манипулировании.
В другом варианте выполнения множество ультразвуковых элементов содержат пьезоэлектрические преобразователи.
В другом варианте выполнения выполнение команд дополнительно побуждает процессор управлять ультразвуковой системой для формирования ультразвука выше заданной пороговой величины в зоне энергетического воздействия. Например, как только местоположение зоны энергетического воздействия становится точно известным, катетер может быть затем использован для абляции ткани или для локального нагрева части тела субъекта.
В другом варианте выполнения ультразвуковая система выполнена с возможностью управления фазой электропитания, подаваемого на ультразвуковой массив. Выполнение машиноисполняемых команд, дополнительно побуждает процессор регулировать фазу множества элементов ультразвукового преобразователя, для модификации местоположения зоны энергетического воздействия, чтобы она совпадала с целевой зоной.
В другом варианте выполнения выполнение машиноисполняемых команд дополнительно побуждает процессор выполнять оценку траектории пучка с использованием по меньшей мере одного импульсного изображения на основе силы акустического излучения. Траектория пучка в контексте настоящего документа охватывает путь, который ультразвук проходит между преобразователем и зоной энергетического воздействия. Этот вариант выполнения может быть выгодным, поскольку с использованием визуализации на основе силы акустического излучения интенсивность ультразвука, который будет формироваться между преобразователем и зоной энергетического воздействия, может быть оценена точно за счет формируемого смещения. Это может быть полезным для предотвращения таких эффектов, как нагрев ближним полем или ожог поверхности субъекта, вызванный высокоинтенсивным ультразвуком в ближнем поле.
В другом варианте выполнения выполнение машиноисполняемых команд дополнительно побуждает процессор определять расстояние между зоной энергетического воздействия и заданным объемом в теле субъекта. Это, например, можно рассматривать как эквивалентное выполнению пробного пуска с использованием системы. Зона энергетического воздействия - это место, где, вероятно, будет выделяться энергия во время воздействия ультразвуком, а заданный объем может представлять собой объем, который является желаемой целью в теле субъекта. Определение расстояния между этими двумя зонами может быть полезным, поскольку тогда врач или другой оператор может заново установить катетер, или электрическое нацеливание в катетере может быть изменено для уменьшения расстояния между зоной энергетического воздействия и заданным объемом.
В другом варианте выполнения медицинское устройство содержит катетер.
В другом варианте выполнения катетер представляет собой трансуретральный катетер.
В другом варианте выполнения катетер представляет собой межуточный катетер.
В другом варианте выполнения катетер представляет собой пищеводный катетер.
В другом аспекте изобретение предусматривает способ эксплуатации медицинского устройства. Медицинское устройство содержит систему магниторезонансной визуализации для приема данных магнитного резонанса от субъекта. Медицинское устройство дополнительно содержит ультразвуковую систему, выполненную с возможностью соединения с катетером с ультразвуковым массивом. Ультразвуковая система выполнена с возможностью приведения в действие ультразвукового массива. Способ содержит этап управления ультразвуковой системой для формирования по меньшей мере одного импульса акустического излучения посредством ультразвуковой системы. Формируемая ультразвуковая энергия находится ниже заданного уровня.
Способ дополнительно содержит этап получения данных магнитного резонанса посредством управления системой магниторезонансной визуализации посредством последовательности импульсов по меньшей мере частично во время формирования по меньшей мере одного импульса акустического излучения. Последовательность импульсов представляет собой последовательность импульсов визуализации на основе силы акустического излучения. Способ дополнительно содержит этап реконструирования по меньшей мере одного импульсного изображения на основе силы акустического излучения с использованием данных магнитного резонанса. Способ дополнительно содержит определение зоны энергетического воздействия для катетера с использованием по меньшей мере частично по меньшей мере одного импульсного изображения на основе силы акустического излучения.
В другом варианте выполнения способ дополнительно содержит этап определения расстояния между зоной энергетического воздействия и заданным объемом в теле субъекта.
В другом аспекте изобретение предусматривает компьютерный программный продукт, содержащий машиноисполняемые команды для выполнения процессором управления медицинским устройством. Медицинское устройство содержит систему магниторезонансной визуализации для приема данных магнитного резонанса от субъекта. Медицинское устройство дополнительно содержит ультразвуковую систему, выполненную с возможностью соединения с катетером с ультразвуковым массивом. Ультразвуковая система выполнена с возможностью приведения в действие ультразвукового массива. Выполнение машиноисполняемых команд побуждает процессор управлять ультразвуковой системой, для формирования по меньшей мере одного импульса акустического излучения посредством ультразвуковой системы. Формируемая ультразвуковая энергия находится ниже заданного уровня.
Выполнение машиноисполняемых команд дополнительно побуждает процессор получать данные магнитного резонанса посредством управления системой магниторезонансной визуализации посредством последовательности импульсов по меньшей мере частично во время формирования по меньшей мере одного импульса акустического излучения. Последовательность импульсов представляет собой последовательность импульсов визуализации на основе силы акустического излучения. Выполнение машиноисполняемых команд дополнительно побуждает процессор реконструировать по меньшей мере одно импульсное изображение на основе силы акустического излучения с использованием данных магнитного резонанса. Выполнение машиноисполняемых команд дополнительно побуждает процессор определять зону энергетического воздействия для катетера с использованием по меньшей мере частично по меньшей мере одного импульсного изображения на основе силы акустического излучения.
Следует понимать, что один или более из вышеупомянутых вариантов выполнения изобретения могут быть скомбинированы, до тех пор, пока скомбинированные варианты выполнения не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже предпочтительные варианты выполнения изобретения будут описаны лишь в качестве примера, и со ссылкой на чертежи, в которых:
Фиг. 1 показывает схему последовательности операций, которая иллюстрирует пример способа;
Фиг. 2 показывает схему последовательности операций, которая иллюстрирует дополнительный пример способа;
Фиг. 3 показывает блок-схему, которая иллюстрирует пример медицинского устройства;
Фиг. 4 иллюстрирует несколько примеров ультразвуковых элементов.
Фиг. 5 иллюстрирует пример катетера;
Фиг. 6 иллюстрирует дополнительный пример катетера;
Фиг. 7 иллюстрирует катетер для разъяснения функционирования медицинского устройства; и
Фиг. 8 иллюстрирует катетер, для разъяснения дополнительного функционирования медицинского устройства;
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Одинаково пронумерованные элементы на чертежах представляют собой эквивалентные элементы, либо выполняют одинаковую функцию. Элементы, которые описаны ранее, нет необходимости описывать на последующих чертежах, если их функция эквивалентна.
Фиг. 1 показывает схему последовательности операций, которая иллюстрирует способ согласно варианту выполнения изобретения. На этапе 100 формируют импульс акустического излучения. Это может быть сделано с использованием ультразвуковой системы для управления катетером с ультразвуковым массивом. Затем на этапе 102 данные магнитного резонанса получают за счет управления системой магниторезонансной визуализации посредством последовательности импульсов по меньшей мере частично во время формирования по меньшей мере одного импульса акустического излучения. Последовательность импульсов представляет собой последовательность импульсов визуализации на основе силы акустического излучения. Затем на этапе 104 импульсное изображение на основе силы акустического излучения реконструируют с использованием данных магнитного резонанса. Наконец, на этапе 106 зону энергетического воздействия определяют с использованием импульсного изображения на основе силы акустического излучения. Если смотреть на смещение внутренней структуры тела субъекта, можно определить, где может находиться большая часть выделяемой энергии, если, например, было выполнено воздействие ультразвуком.
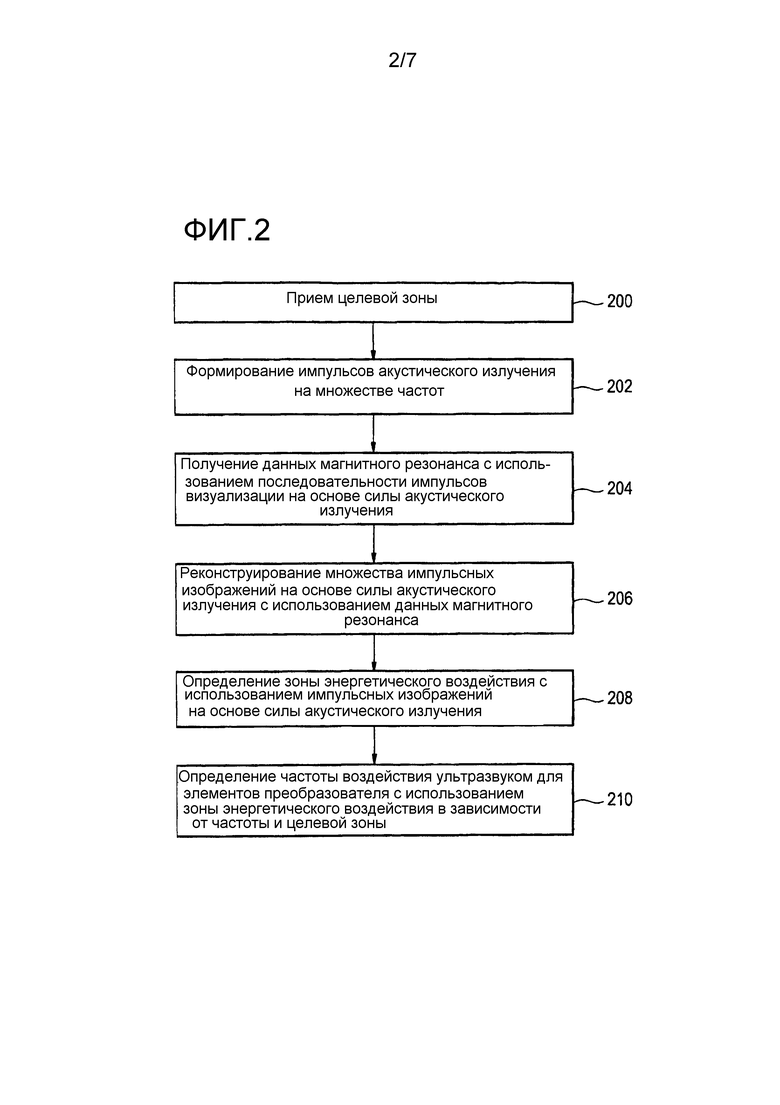
Фиг. 2 показывает схему последовательности операций, которая дополнительно иллюстрирует способ согласно варианту выполнения изобретения. Сначала на этапе 200 получают целевую зону. Это может происходить, например, в форме плана лечения. Целевая зона описывает положение во внутренней анатомии субъекта, воздействие ультразвуком на которое может быть желательной. Затем, на этапе 202 импульсы акустического излучения формируют на множестве частот. Затем, на этапе 204 данные магнитного резонанса принимают с использованием последовательностей импульсов визуализации на основе силы акустического излучения, и это выполняют по меньшей мере частично во время формирования импульсов излучения на множестве частот. Затем на этапе 206 множество импульсных изображений на основе силы акустического излучения реконструируют с использованием данных магнитного резонанса. Затем на этапе 208 зону энергетического воздействия определяют с использованием импульсных изображений на основе силы акустического излучения. Как правило, это бывает зона энергетического воздействия, зависимая от частоты. При наличии множества преобразователей, можно использовать множество частот, вследствие чего путем управления, при котором используются эти преобразователи и/или при котором используются эти частоты, можно управлять местоположением зоны энергетического воздействия. Наконец, на этапе 210 частоту воздействия ультразвуком определяют для элементов преобразователя с использованием зависимой от частоты зоны энергетического воздействия и целевой зоны. Частота может быть выбрана для каждого из элементов преобразователя таким образом, чтобы зона энергетического воздействия достаточно хорошо перекрывала целевую зону таким образом, чтобы можно было выполнить воздействие ультразвуком.
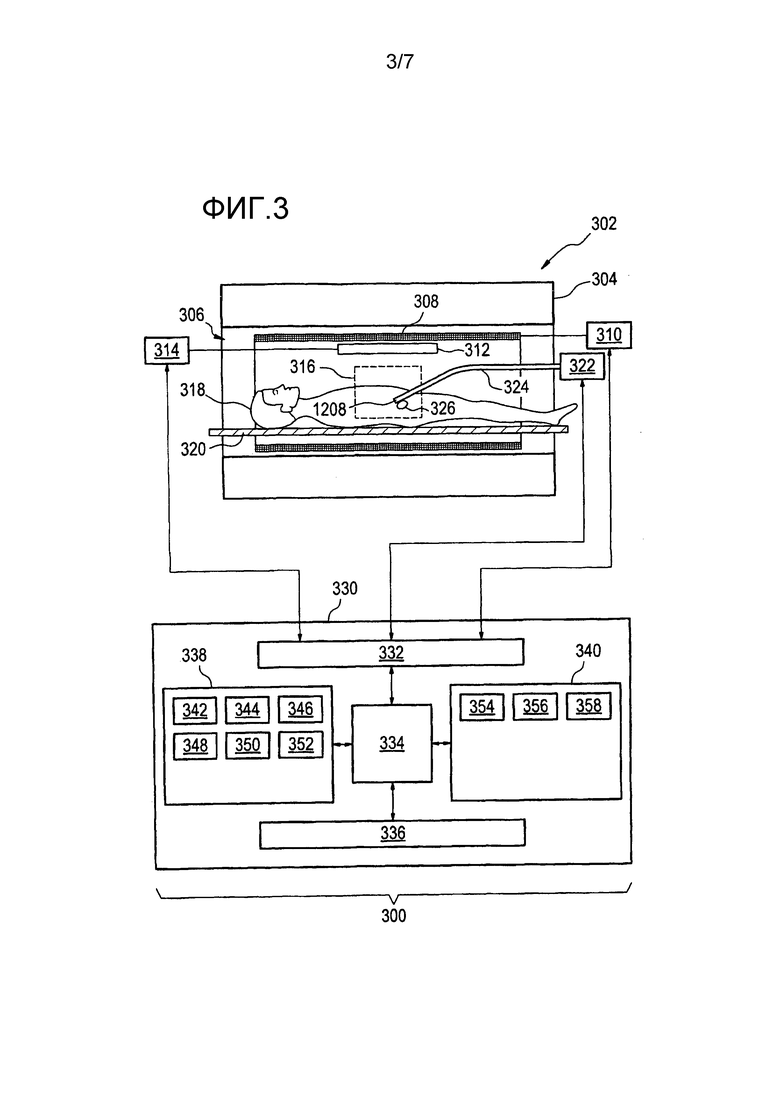
Фиг. 3 показывает медицинское устройство 300 согласно варианту выполнения изобретения. Система магниторезонансной визуализации содержит магнит 304. Магнит 304 представляет собой сверхпроводящий магнит цилиндрического типа. Магнит имеет охлаждаемый жидким гелием криостат со сверхпроводящими катушками. Также можно использовать постоянные или резистивные магниты. Также возможно использование различных типов магнитов, например, также можно использовать как разделенный цилиндрический магнит, так и так называемый открытый магнит. Разделенный цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат был разделен на две секции, для обеспечения доступа к изоплоскости магнита, и такие магниты могут быть использованы, например, в сочетании с терапией пучком заряженных частиц. Открытый магнит имеет две секции магнита, - один выше другого, с пространством между ними, достаточно крупное, чтобы вмещать в себя тело субъекта: расположение двух секций аналогично расположению катушки Гельмгольца. Открытые магниты популярны, поскольку при их использовании субъект ограничен меньше. Внутри криостата цилиндрического магнита находится комплект сверхпроводящих катушек. В зазоре цилиндрического магнита находится зона формирования изображения, где магнитное поле достаточно сильное и однородное для выполнения магниторезонансной визуализации.
В зазоре 306 магнита 304 находится катушка 308 градиента магнитного поля, которая снабжается током от источника питания 310 градиента магнитного поля. Катушку 308 градиента магнитного поля используют для пространственного кодирования магнитных спинов в зоне формирования изображения магнита во время получения данных магнитного резонанса. Катушка 308 градиента магнитного поля приведена в качестве примера. Обычно катушки градиента магнитного поля содержат три отдельных комплекта катушек для пространственного кодирования по трем взаимно перпендикулярным пространственным направлениям. Ток, подаваемый на катушку 308 магнитного поля, регулируется в зависимости от времени и может быть повышен или приведен в импульсный режим.
В зазоре магнита 306 находится зона 316 формирования изображения, где магнитное поле является достаточно однородным для выполнения магниторезонансной визуализации. Рядом с зоной 316 формирования изображения находится антенна 312. Антенна 312 соединена с приемопередатчиком 314. Радиочастотная антенна 316 предназначена для манипулирования ориентациями магнитных спинов в зоне 316 формирования изображения и для приема радиопередач от спинов также в зоне формирования изображения. Радиочастотная антенна может содержать множество элементов катушки. Радиочастотная антенна также может называться каналом. Радиочастотная катушка соединена с радиочастотным приемопередатчиком 314. Радиочастотная катушка 312 и радиочастотный приемопередатчик 314 могут быть заменены отдельными передающей и приемной катушками и отдельными передатчиком и приемником. Радиочастотная антенна также предназначена для отображения специальной передающей антенны и специальной приемной антенны. Аналогично, приемопередатчик 314 также может представлять собой отдельные передатчики и приемники.
Субъекта 318 можно рассматривать как отдыхающего на опоре 320 для субъекта. Субъект частично находится в зоне формирования изображения. Катетер 324 помещают в тело субъекта 318. Существует зона 326 энергетического воздействия, которая показана как прилегающая к катетеру 324. Катетер 324 соединен с ультразвуковой системой 322, которая обеспечивает электропитание для энергоснабжения массивов первичных ультразвуковых преобразователей на катетере 324. Зона 326 энергетического воздействия находится в зоне 316 формирования изображения.
Приемопередатчик 314, источник питания 310 катушки градиента магнитного поля и ультразвуковая система 322 показаны как соединенные с аппаратным интерфейсом 332 компьютерной системы 330. Компьютер 330 также содержит процессор 334. Процессор 334 имеет связь с аппаратным интерфейсом 332, который позволяет процессору 334 управлять ориентацией и функцией медицинского устройства 300. Процессор 334 также показан как имеющий связь с пользовательским интерфейсом 336, запоминающим устройством 338 компьютера и компьютерной памятью 340.
Запоминающее устройство компьютера показано как содержащее план лечения 342. План лечения 342 представляет собой план для участка воздействия ультразвуковой субъекта 318. Он содержит целевую зону 344, которая описывает анатомическое положение, воздействие ультразвуковом на которое может быть желательным. Запоминающее устройство 338 компьютера показано как дополнительно содержащее последовательность 346 импульсов. Последовательность 346 импульсов содержит комплект элементов управления или команд, которые исполняются во временной последовательности, которая позволяет системе магниторезонансной визуализации 302 принимать данные магнитного резонанса, с использованием протокола формирования изображения силы акустического излучения. Как таковая, последовательность 346 импульсов также может быть использована для управления ультразвуковой системой 322. Запоминающее устройство 338 компьютера дополнительно показано как содержащее данные 348 магнитного резонанса, которые были приняты с использованием последовательности 346 импульсов. Запоминающее устройство 338 компьютера дополнительно показано как содержащее импульсное изображение на основе силы акустического излучения, которое было реконструировано из данных 348 магнитного резонанса. Запоминающее устройство 338 компьютера дополнительно показано как содержащее местоположение зоны 352 энергетического воздействия, которая была определена с использованием импульсного изображения 350 на основе силы акустического излучения.
Компьютерная память 340 дополнительно показана как содержащая управляющий модуль 354. Управляющий модуль 354 содержит машиноисполняемый код, который позволяет процессору 334 управлять ориентацией и функцией медицинского устройства 300. Например, он может позволять процессору 334 принимать данные 348 магнитного резонанса с использованием последовательности 346 импульсов. Компьютерная память 340 дополнительно показана как содержащая модуль реконструирования изображения. Модуль реконструирования изображения содержит машиноисполняемый код, который позволяет процессору 334 реконструировать импульсное изображение 350 на основе силы акустического излучения из данных 348 магнитного резонанса. Компьютерная память 340 дополнительно содержит модуль 358 обработки изображения. Модуль 358 обработки изображения содержит машиноисполняемый код, который позволяет процессору 334 определять местоположение зоны 352 энергетического воздействия из импульсного изображения 350 на основе силы акустического излучения.
Фиг. 4 показывает несколько примеров элементов 400, 402, 404 преобразователя, которые могут быть использованы в варианте выполнения. На Фиг. 4 показан стандартный пьезоэлектрический элемент 400. Далее, для пьезоэлектрического элемента 400 предназначены два массива 402, 404 емкостных ультразвуковых преобразователей, полученных путем микрообработки. Пьезоэлектрический элемент 400 имеет два электрических соединения 406 для приведения в действие элемента 400.
Массив 402 емкостных первичных ультразвуковых преобразователей, полученных путем микрообработки, имеет первое 408 и второе 410 электрические соединения. Массив 402 является проводным, вследствие чего он функционирует как один элемент преобразователя, так, как действует пьезоэлектрический элемент 400. Это демонстрирует, как массив 402 может быть использован как замена для всего пьезоэлектрического элемента 400. Чертеж 412 показывает увеличенный вид массива 402. Можно видеть отдельные емкостные ультразвуковые преобразователи 414, полученные путем микрообработки. Видно, что каждый из преобразователей 414 соединен с первым 408 и вторым 410 электрическими соединениями. Массив 404 емкостных ультразвуковых преобразователей, полученных путем микрообработки выполнен в виде линейного массива. Для каждого ряда преобразователей существует набор первых 416 и вторых 418 электрических соединений. Чертеж 420 представляет собой подробное описание увеличенного вида массива 404. Отдельный емкостной ультразвуковой преобразователь 422, полученный путем микрообработки, может быть показан как соединенный с первым 424 и вторым 426 электрическим соединением. Соединения 424 и 426 выбраны из первого 416 и второго 418 комплектов электрических соединений.
В дополнение к проводным емкостным ультразвуковым преобразователям, полученным путем микрообработки, в крупноблочных массивах или в линейных массивах отдельные ультразвуковые преобразователи, полученные путем микрообработки, также могут управляться по отдельности своими собственными источниками.
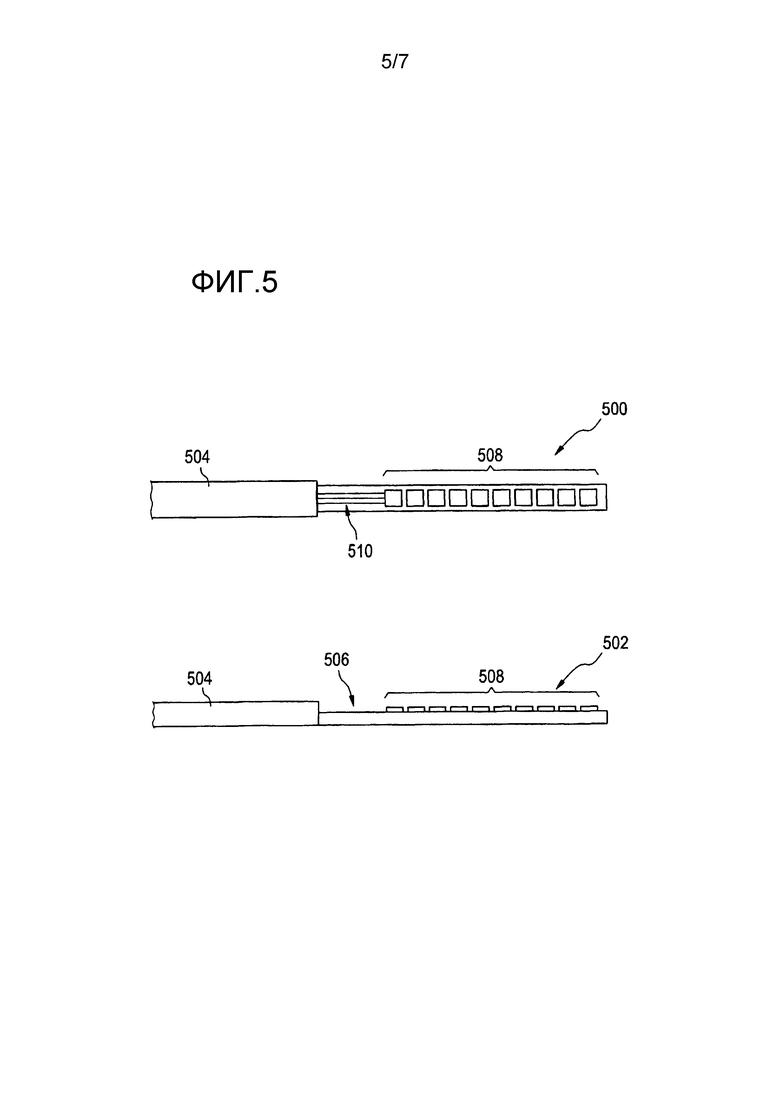
Фиг. 5 показывает вид сверху 500 и вид сбоку 502 катетера 504. Это есть чистый пример одного способа, согласно которому катетер может быть сконструирован. Существует плоская поверхность 506, на которой закреплено множество ультразвуковых преобразователей 508. В данном примере преобразователи расположены в виде линейного массива. Существуют электрические соединения 510, которые обеспечивают подачу электропитания на каждый из ультразвуковых преобразователей 508. Ультразвуковые преобразователи 508 могут представлять собой пьезоэлектрические преобразователи, или они даже могут представлять собой отдельные массивы CMUT.
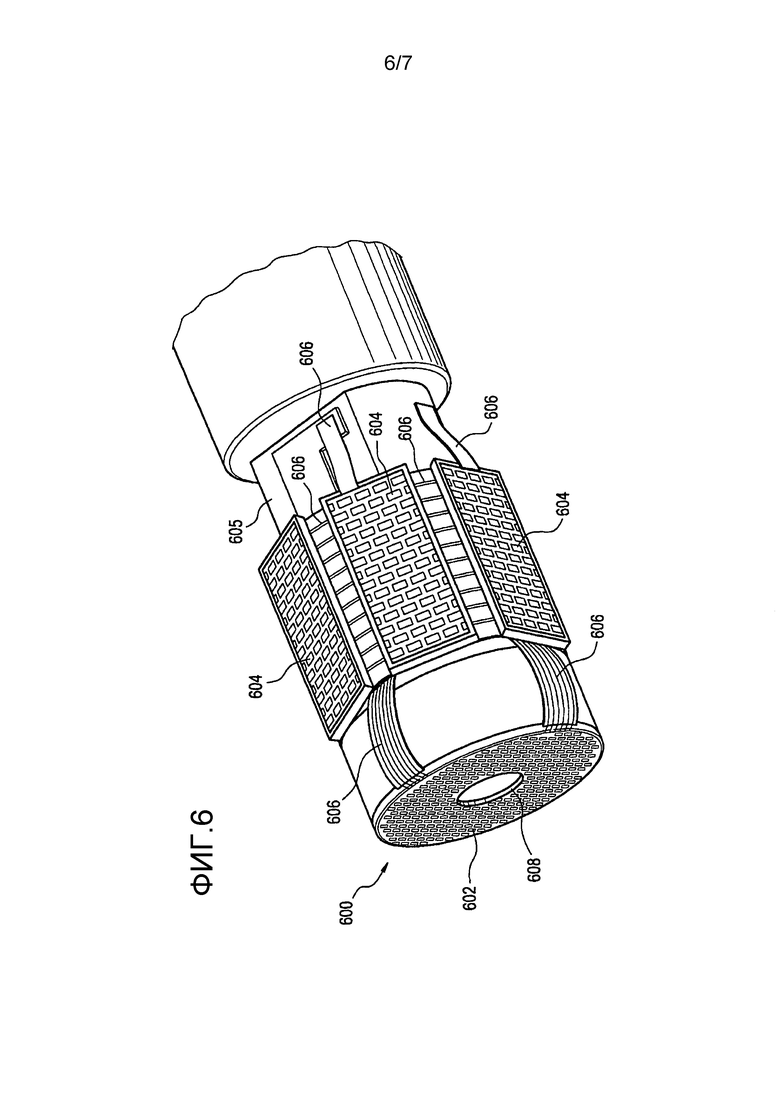
Фиг. 6 показывает дистальный конец 600 катетера согласно варианту выполнения изобретения. В этом варианте выполнения существует ориентированный в прямом направлении кольцевой массив 602. Существует массив емкостных ультразвуковых преобразователей, полученных путем микрообработки, окружающий отверстие 608. Позади кольцевого массива 602 расположены панели ориентированных в поперечном направлении массивов 604. Массивы 604 образуют кольцо вокруг вала катетера. На данном чертеже показаны различные электрические соединения 606. Ориентированный вперед кольцевой массив 602 может быть использован для таких вещей, как обеспечения трехмерного формирования изображения. Ориентированные вбок массивы 604 могут быть использованы для ультразвуковой абляции и монторинга. Отдельные емкостные ультразвуковые преобразователи, полученные путем микрообработки, могут быть использованы для управления лучом во время ультразвуковой абляции. Преимущества этого варианта выполнения могут включать в себя отсутствие или минимальную необходимость в механическом вращении катетера. Отверстие 608 может быть использовано для дополнительных аппаратов или для водного орошения. Вариант выполнения, показанный на Фиг. 6, может фокусироваться на множестве направлений, так что для таких вещей, как абляция предстательной железы, сканирование по всем 360 градусам вокруг зонда может быть выполнено одновременно. Это может привести к меньшему времени обработки и, таким образом, также снижает затраты.
Фиг. 7 используют для иллюстрации функционирования медицинского устройства. Показан эскиз катетера 700 с множеством элементов 702 преобразователя, закрепленных на поверхности. Для этого примера активируют только средний элемент 702 преобразователя. Линия 704 обрамляет приближенное положение поля излучения, исходящего из ультразвукового преобразователя 702. В пределах поля 704 ультразвукового излучения данные магнитного резонанса были получены с использованием протокола формирования изображения силы акустического излучения, а стрелки 706 указывают на приближенную меру смещения ткани в теле субъекта, вызванного ультразвуком. Если смотреть на величину стрелки 706, можно определить, что максимально выделение происходит в точке 708. Это можно затем определить как зону энергетического воздействия.
В дополнение к обнаружению местоположения, также можно идентифицировать максимальные области поля 704 излучения. Например, существует траектория пучка между элементом 702 преобразователя и максимумом 708. Ближе к элементу 702 находится ближнее поле 712 ультразвукового излучения. В дополнение к уже описанному максимуму существует большое количество информации, которая будет описывать то, как энергия будет распределена по направлению к субъекту под действием элементов 702 преобразователя при выполнении воздействия ультразвуком. Такие измерения могут быть выполнены для одного элемента, множества элементов, или даже при различных частотах. Например, такая карта, как показанная на Фиг. 7, может быть создана повторно для различных частот, и это может быть затем использовано для точного нацеливания ультразвука с использованием катетера 700.
Фиг. 8 показывает дополнительный пример катетера 700. В этом примере ультразвук формируется тремя средними элементами 702 преобразователя. Теперь может быть видна зона 708 энергетического воздействия. В дополнение, на диаграмме отмечена целевая зона 800. Эта Фиг. Показывает, что зона 708 энергетического воздействия не обязательно находится в надлежащей позиции для целевой зоны 800. Такая диаграмма может быть отображена на дисплее медицинского устройства и может быть использована в качестве руководства для врача или другого оператора, для лучшего размещения катетера, или еще также могут быть использованы технологии электронного управления, например, могут быть активированы различные элементы 792 преобразователя, или также фаза и/или частота формируемого ультразвука может быть изменена таким образом, чтобы зона 708 энергетического воздействия более близко совпадала с позицией целевой зоны 800.
Визуализация на основе силы акустического излучения (ARFI) может быть использована для оценки акустической среды и вычисления термического поражения, которое, вероятно, может вызвать воздействие ультразвуком, не вызывая по существу никакого поражения. Это, в свою очередь, предусматривает процедуру тонкой настройки перед абляцией, которая может дополнительно повысить безопасность и эффективность обработки.
Терапия HIFU рака предстательной железы все в большей степени используется в качестве неинвазивной альтернативы с возможностью снижения таких побочных эффектов, как импотенция и недержание при том, что она к тому же обеспечивает эффективное лечение. К настоящему времени большая часть процедур проводилась при ультразвуковом наведении. МР-наведение обеспечивает некоторые преимущества, такие как температурная визуализация, но также обеспечивает улучшения на этапе планирования.
Одно из усовершенствований, которые обеспечивает МРВ, состоит в возможности использования визуализации на основе силы акустического излучения (ARFI) на этапе предварительного планирования этих терапий рака предстательной железы. Терапия HIFU предстательной железы может быть осуществлена трансректально или путем обработки ультразвуком через ректальную стенку, или устройство HIFU является трансуретральным, и обработка ультразвуком происходит через стенку уретры. ARFI может быть использовано в обоих случаях лишь с наименьшей общей энергией для обеспечения акустической связи между устройством HIFU и предстательной железой. Это, в частности, относится к трансректальному HIFU, поскольку ректальная стенка очень чувствительна и может быть повреждена при плохом контакте, что может привести к локальному поглощению энергии HIFU, что потенциально может вызвать повреждение ректальной стенки. В случае с уретрой данная проблема менее выражена, но тем не менее она будет препятствовать терапии, если энергию не получится передать туда, где она нужна.
Часто терапию HIFU рака предстательной железы осуществляют как терапию всей железы, когда вся предстательная железа подвергается абляции. Если местоположение рака может быть успешно определено в рамках предстательной железы (тема активных исследований в МРВ-сообществе), также можно осуществить так называемую фокальную терапию, при которой подвергаются воздействию лишь некоторые части предстательной железы, которые, как предполагается, имеют раковые клетки. Это, вероятно, даже сильнее уменьшает осложнения.
Другое преимущество, обеспечиваемое ARFI, состоит в том, что поле давлений может быть оценено через силу излучения, с которой HIFU воздействует на ткань. Поле локального давления также представляет собой механизмы, через которые HIFU нагревает ткань. Следовательно, оценка распределения поля давлений дает представление о распределении нагрева, к которому оно может привести. Это может быть использовано для улучшения понимания того, что вероятно может произойти вблизи таких чувствительных структур, как ректальная стенка, и в частности, пучков нервов (которые, как предполагается, управляют функционированием полового члена, а также функционированием цисты). Более того, если преобразователь способен формировать различные частоты, поля давлений этих различных частот могут быть оценены и сопоставлены, с использованием этого способа ARFI. Это может помочь выбору наиболее подходящей частоты для различных частей предстательной железы, с обеспечением, таким образом, еще более усовершенствованной безопасности.
Как пьезо-, так и CMUT-преобразователи могут извлекать пользу из ARFI, хотя CMUT также могут обладать преимуществом, состоящим в оптимизации поля давлений вблизи чувствительных структур, вследствие чего, если рак обнаружен, например, вблизи пучков нервов, угловой изгиб преобразователей (CMUT) может быть сделан механически ориентируемым, что позволяет изгибать их управляемым образом, частота и фаза элементов могут быть выбраны так, чтобы поле давлений имело высокое давление вблизи края предстательной железы, но чтобы оно падало как можно быстрее по направлению к чувствительному пучку нервов.
ARFI предстательной железы может предусматривать проверку правильности акустического пути. Например, для трансуретрального устройства (обычно лишь примерно для 10 элементов, отдельные поля давлений которых могут быть обнаружены) можно ожидать обнаружение некоторой силы излучения, воздействующей на переднюю поверхность каждого элемента. Если этого нет, или если существует большое различие между элементами, то вероятно в уретре существует воздушный карман или что-то подобное, или катетер препятствует элементу преобразователя функционировать так хорошо, как он может. Это может повредить уретру (хотя это не такая большая проблема), повредить преобразователь или привести к не самой оптимальной терапии, если проблема не была замечена и зафиксирована. Для трансректального устройства преимущества обозначены выше.
Планированию лечения дополнительно может способствовать обеспечение лучшего понимания поля давлений, и если частота может быть изменена, то эта частота может лучше подходить для абляции данных частей предстательной железы. Это является важным для всей гормональной терапии, поскольку в идеале вероятно можно будет полностью подвергнуть абляции всю предстательную железу, но ничего - за пределами предстательной железы (в частности, не затронуть пучки нервов). Для фокальной терапии можно проанализировать различные фокальные области, которые следует подвергнуть абляции по отдельности.
Все это можно сделать с помощью ARFI при доле энергии, которая может быть необходима для испытательного воздействия ультразвуком. Также ARFI может быть проведено намного быстрее, чем испытательное воздействие ультразвуком.
В одном примере воздействие ультразвуком может быть связано с градиентами, кодирующими движение, с помощью которых можно получить изображение смещения. Часто бывает необходимо другое изображение с обратными градиентами, кодирующими движение, для удаления фоновой информации. Эти значения смещения зависят от локальной силы излучения, а они, в свою очередь, зависят от локального поля давлений.
Тогда как изобретение было проиллюстрировано и подробно описано на чертежах и в вышеприведенном описании, такую иллюстрацию и описание следует рассматривать как иллюстративные или примерные, а не ограничивающие; изобретение не ограничено раскрытыми вариантами выполнения.
Другие изменения в раскрытых вариантах выполнения могут быть предусмотрены и осуществлены специалистами в данной области техники при реализации заявленного изобретения, исходя из изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает наличия других элементов или этапов, а единственное число не исключает множественности. Одиночный процессор или другой блок может выполнять функции множества объектов, перечисленных в формуле изобретения. Сам факт, что определенные меры перечислены в отличных друг от друга зависимых пунктах формулы изобретения, не указывает на то, что нельзя успешно использовать сочетание этих мер. Компьютерная программа может быть сохранена/распределена на подходящем носителе, таком как оптический носитель памяти или твердотельный носитель, предоставляемый вместе или как часть другого аппаратного обеспечения, но она также может быть распределена в других формах, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Никакие ссылочные обозначения в формуле изобретения не следует рассматривать как ограничивающие объем.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
300 - медицинское устройство
302 - система магниторезонансной визуализации
304 - магнит
306 - зазор магнита
308 - катушка градиента магнитного поля
310 - источник питания катушки градиента магнитного поля
312 - антенна
314 - приемопередатчик
316 - зона формирования изображения
318 - субъект
320 - опора субъекта
322 - ультразвуковая система
324 - катетер
326 - зона энергетического воздействия
330 - компьютер
332 - аппаратный интерфейс
334 - процессор
336 - пользовательский интерфейс
338 - запоминающее устройство компьютера
340 - компьютерная память
342 - план лечения
344 - целевая зона
346 - последовательность импульсов
348 - данные магнитного резонанса
350 - изображение силы акустического излучения
352 - местоположение зоны энергетического воздействия
354 - управляющий модуль
356 - модуль реконструирования изображения
358 - модуль обработки изображения
400 - пьезоэлемент
402 - массив емкостных ультразвуковых преобразователей, полученных путем микрообработки
404 - массив емкостных ультразвуковых преобразователей, полученных путем микрообработки
406 - электрические соединения
408 - первое электрическое соединение
410 - второе электрическое соединение
412 - увеличенный вид массива 402
414 - емкостной ультразвуковой преобразователь, полученный путем микрообработки
416 - комплект первых электрических соединений
418 - комплект вторых электрических соединений
420 - увеличенный вид массива 404
422 - емкостной ультразвуковой преобразователь, полученный путем микрообработки
424 - первое электрическое соединение
426 - второе электрическое соединение
500 - вид сверху
502 - вид сбоку
504 - катетер
506 - плоская поверхность
508 - ультразвуковые преобразователи
510 - электрические соединения
600 - дальний конец катетера
602 - кольцевой массив, ориентированный вперед
604 - массив, ориентированный вбок
605 - вал
606 - электрическое соединение
608 - отверстие
700 - катетер
702 - элементы преобразователя
704 - поле ультразвукового излучения
706 - данные о смещении
708 - зона энергетического воздействия
710 - траектория пучка
712 - ближнее поле
800 - целевая зона



Группа изобретений относится к медицинской технике. Медицинское устройство для энергетического воздействия на участок тела субъекта с использованием катетера содержит систему магниторезонансной визуализации для получения данных магнитного резонанса от субъекта; ультразвуковую систему, выполненную с возможностью соединения с катетером с ультразвуковым массивом, содержащим множество ультразвуковых элементов, причем каждый из множества ультразвуковых элементов выполнен с возможностью формирования ультразвука на множестве частот; память для хранения машиноисполняемых команд и процессор для управления медицинским устройством. Процессор выполнен, чтобы управлять ультразвуковой системой для формирования импульса акустического излучения посредством ультразвуковой системы; получать данные магнитного резонанса при управлении системой магниторезонансной визуализации посредством последовательности импульсов во время формирования импульса акустического излучения; реконструировать импульсное изображение на основе силы акустического излучения с использованием данных магнитного резонанса; определять зону энергетического воздействия для катетера с использованием импульсного изображения на основе силы акустического излучения и точно нацеливать или направлять ультразвуковой массив для выделения ультразвуковой энергии в целевую зону в субъекте путем управления фазами ультразвуковых элементов. Раскрыты способ работы медицинского устройства и машиночитаемый носитель для сохранения команд для выполнения процессором. Технический результат состоит в обеспечении энергетического воздействия с помощью катетера в теле человека. 3 н. и 10 з.п. ф-лы, 8 ил.
1. Медицинское устройство (300) для энергетического воздействия на участок тела субъекта с использованием катетера, причём медицинское устройство содержит:
- систему (302) магниторезонансной визуализации для получения данных (348) магнитного резонанса от субъекта (318);
- ультразвуковую систему (322), выполненную с возможностью соединения с катетером (324, 504, 600) с ультразвуковым массивом (400, 402, 404, 508, 602, 604), содержащим множество ультразвуковых элементов, причем каждый из множества ультразвуковых элементов выполнен с возможностью формирования ультразвука на множестве частот, и при этом ультразвуковая система выполнена с возможностью приведения в действие ультразвукового массива;
- память (340) для хранения машиноисполняемых команд (354, 356, 358);
- процессор (334) для управления медицинским устройством, причем выполнение машиноисполняемых команд побуждает процессор:
- управлять (100, 202) ультразвуковой системой для формирования по меньшей мере одного импульса акустического излучения посредством ультразвуковой системы, причем формируемая ультразвуковая энергия находится ниже заданного уровня;
- получать (102, 204) данные магнитного резонанса при управлении системой магниторезонансной визуализации посредством последовательности (346) импульсов по меньшей мере частично во время формирования по меньшей мере одного импульса акустического излучения, причем последовательность импульсов представляет собой последовательность импульсов визуализации на основе силы акустического излучения;
- реконструировать (104, 206) по меньшей мере одно импульсное изображение на основе силы акустического излучения с использованием данных магнитного резонанса и
- определять (106, 208) зону энергетического воздействия для катетера с использованием по меньшей мере частично по меньшей мере одного импульсного изображения на основе силы акустического излучения и точно нацеливать или направлять ультразвуковой массив для выделения ультразвуковой энергии в целевую зону в субъекте путем управления фазами ультразвуковых элементов, и при этом ультразвуковая система выполнена с возможностью управления каждым из ультразвуковых элементов для формирования ультразвука на множестве частот, причем по меньшей мере один импульс акустического излучения содержит множество импульсов с ультразвуком, формируемых с использованием по меньшей мере некоторых из упомянутого множества частот, причем выполнение команд побуждает процессор реконструировать множество импульсных изображений на основе силы акустического излучения с использованием данных магнитного резонанса, полученных по меньшей мере частично во время упомянутого множества импульсов, причем выполнение машиноисполняемых команд дополнительно побуждает процессор принимать (200) план лечения, описывающий целевую зону в субъекте, и при этом зона энергетического воздействия дополнительно определяется по меньшей мере частично с использованием упомянутого множества импульсных изображений на основе силы акустического излучения, и при этом выполнение команд дополнительно побуждает процессор определять (210) частоту воздействия ультразвуком для каждого из ультразвуковых элементов с использованием зоны энергетического воздействия в зависимости от частоты и целевой зоны.
2. Медицинское устройство по п. 1, в котором множество ультразвуковых элементов содержит по меньшей мере один массив (402, 404) емкостных первичных ультразвуковых преобразователей, полученных путем микрообработки.
3. Медицинское устройство по п. 2, в котором ультразвуковая система выполнена с возможностью регулирования фокусировки по меньшей мере одного массива емкостных первичных ультразвуковых преобразователей, полученных путем микрообработки, посредством управления фазой электропитания, подаваемого на емкостные элементы по меньшей мере одного емкостного ультразвукового преобразователя, полученного путем микрообработки, причем выполнение машиноисполняемых команд побуждает процессор управлять фазой электропитания, подаваемого на емкостные элементы по меньшей мере одного емкостного ультразвукового преобразователя, полученного путем микрообработки, для управления местоположением зоны энергетического воздействия.
4. Медицинское устройство по п. 1, в котором множество ультразвуковых элементов содержит пьезоэлектрические преобразователи.
5. Медицинское устройство по п. 1, в котором ультразвуковая система выполнена с возможностью управления фазой электропитания, подаваемого на ультразвуковой массив, в котором выполнение машиноисполняемых команд дополнительно побуждает процессор регулировать фазу множества элементов ультразвукового преобразователя для изменения местоположения зоны энергетического воздействия для соответствия целевой зоне.
6. Медицинское устройство по п. 1, в котором выполнение команд побуждает процессор управлять ультразвуковой системой для формирования ультразвука выше заданной пороговой величины в зоне энергетического воздействия.
7. Медицинское устройство по п. 1, в котором выполнение машиноисполняемых команд дополнительно побуждает процессор выполнять оценку траектории пучка с использованием по меньшей мере одного импульсного изображения на основе силы акустического излучения.
8. Медицинское устройство по п. 1, в котором выполнение машиноисполняемых команд дополнительно побуждает процессор определять расстояние между зоной энергетического воздействия и заданным объемом в субъекте.
9. Медицинское устройство по п. 1, в котором медицинское устройство содержит катетер.
10. Медицинское устройство по п. 9, в котором катетер представляет собой любой из следующего: трансуретрального катетера, интерстициального катетера и пищеводного катетера.
11. Способ работы медицинского устройства (300) для энергетического воздействия на участок тела субъекта с использованием катетера, причем медицинское устройство содержит систему (302) магниторезонансной визуализации для получения данных (348) магнитного резонанса от субъекта (318), причем медицинское устройство дополнительно содержит ультразвуковую систему (322), выполненную с возможностью соединения с катетером (324, 504, 600) с ультразвуковым массивом (400, 402, 404, 508, 602, 604), содержащим множество ультразвуковых элементов, причем каждый из множества ультразвуковых элементов выполнен с возможностью работы на множестве частот, и при этом ультразвуковая система выполнена с возможностью приведения в действие ультразвукового массива, причем способ содержит этапы, на которых:
- управляют (100, 102) ультразвуковой системой для формирования по меньшей мере одного импульса акустического излучения посредством ультразвуковой системы, причем формируемая ультразвуковая энергия находится ниже заданного уровня;
- получают (102, 204) данные магнитного резонанса путем управления системой магниторезонансной визуализации посредством последовательности импульсов по меньшей мере частично во время формирования по меньшей мере одного импульса акустического излучения, причем последовательность импульсов представляет собой последовательность импульсов визуализации на основе силы акустического излучения;
- реконструируют (104, 206) по меньшей мере одно импульсное изображение на основе силы акустического излучения с использованием данных магнитного резонанса и
- определяют (106, 208) зону энергетического воздействия для катетера с использованием по меньшей мере частично по меньшей мере одного импульсного изображения на основе силы акустического излучения,
- управляют каждым из ультразвуковых элементов для формирования ультразвука на множестве частот;
- формируют множество импульсов с ультразвуком с использованием по меньшей мере некоторых из упомянутого множества частот, причем выполнение команд побуждает процессор реконструировать множество импульсных изображений на основе силы акустического излучения с использованием данных магнитного резонанса, полученных по меньшей мере частично во время множества импульсов;
- принимают план лечения, описывающий целевую зону в субъекте, и при этом зону энергетического воздействия дополнительно определяют по меньшей мере частично с использованием упомянутого множества импульсных изображений на основе силы акустического излучения, и
- определяют частоту воздействия ультразвуком для каждого из ультразвуковых элементов с использованием зоны энергетического воздействия в зависимости от частоты и целевой зоны.
12. Способ по п. 11, причем способ дополнительно содержит этап, на котором определяют расстояние между зоной энергетического воздействия и заданным объемом в субъекте.
13. Машиночитаемый носитель, на котором сохранены машиноисполняемые команды (354, 356, 358) для выполнения процессором (334), управляющим медицинским устройством (300) для энергетического воздействия на участок тела субъекта с использованием катетера, причем медицинское устройство содержит систему (302) магниторезонансной визуализации для получения данных (348) магнитного резонанса от субъекта (318), причем медицинское устройство дополнительно содержит ультразвуковую систему (322), выполненную с возможностью соединения с катетером (324, 504, 600) с ультразвуковым массивом (400, 402, 404, 508, 602, 604), содержащим множество ультразвуковых элементов, причем каждый из множества ультразвуковых элементов выполнен с возможностью формирования ультразвука на множестве частот, и при этом ультразвуковая система выполнена с возможностью приведения в действие ультразвукового массива, причем выполнение машиноисполняемых команд побуждает процессор:
- управлять (100, 102) ультразвуковой системой для формирования по меньшей мере одного импульса акустического излучения посредством ультразвуковой системы, причем формируемая ультразвуковая энергия находится ниже заданного уровня;
- получать (102, 204) данные магнитного резонанса путем управления системой магниторезонансной визуализации посредством последовательности (346) импульсов по меньшей мере частично во время формирования по меньшей мере одного импульса акустического излучения, причем последовательность импульсов представляет собой последовательность импульсов визуализации на основе силы акустического излучения;
- реконструировать (104, 206) по меньшей мере одно импульсное изображение на основе силы акустического излучения с использованием данных магнитного резонанса и
- определять (106, 208) зону энергетического воздействия для катетера с использованием по меньшей мере частично по меньшей мере одного импульсного изображения на основе силы акустического излучения,
- управлять каждым из ультразвуковых элементов для формирования ультразвука на множестве частот;
- формировать множество импульсов с ультразвуком с использованием по меньшей мере некоторых из множества частот, причем выполнение команд побуждает процессор реконструировать множество импульсных изображений на основе силы акустического излучения с использованием данных магнитного резонанса, полученных по меньшей мере частично во время множества импульсов;
- принимать план лечения, описывающий целевую зону в теле субъекта, и при этом зону энергетического воздействия дополнительно определяют по меньшей мере частично с использованием упомянутого множества импульсных изображений на основе силы акустического излучения, и
- определять частоту воздействия ультразвуком для каждого из ультразвуковых элементов с использованием зоны энергетического воздействия в зависимости от частоты и целевой зоны.
| US 2011270136 A1, 03.11.2011 | |||
| US 2012065492 A1,15.03.2012 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| УСТРОЙСТВО ДЛЯ КОМПЛЕКСНОГО ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ПРЕДСТАТЕЛЬНОЙ ЖЕЛЕЗЫ | 1999 |
|
RU2153366C1 |
| KINSEY A M et al., Interstitial ultrasound applicatores with dynamic angular angular control for thermal ablation of tumors uinder MR-guidance", Annual international conference of the IEEE Engineering in medicine and biology Conference proceedings: Annual International | |||
| IEEE Engineering in Medicine and Biology Society | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

